面向體系仿真的敏捷成像衛(wèi)星系統(tǒng)建模方法
2023-09-06 01:00:44陸志灃周金鵬從光濤
系統(tǒng)仿真技術(shù) 2023年2期
高 遠, 陸志灃, 周金鵬, 賴 鵬, 從光濤
(上海機電工程研究所,上海 201109)
近年來,敏捷成像衛(wèi)星技術(shù)迅猛發(fā)展,因其衛(wèi)星平臺的靈巧性及成像載荷的工作模式多樣性,能夠更為快速地獲取高質(zhì)量圖像信息,因而越來越多地應(yīng)用于各國軍事領(lǐng)域,服務(wù)于戰(zhàn)場態(tài)勢監(jiān)視及重點目標(biāo)偵察任務(wù)[1-3]。敏捷成像衛(wèi)星系統(tǒng)由空間段的敏捷成像衛(wèi)星以及地面段的接收遙測系統(tǒng)與任務(wù)系統(tǒng)組成。敏捷成像衛(wèi)星系統(tǒng)工作的一般過程為:地面任務(wù)系統(tǒng)通過處理成像任務(wù)生成衛(wèi)星任務(wù)方案;以任務(wù)指令的形式控制衛(wèi)星在過頂時段內(nèi)實現(xiàn)對地成像;將成像結(jié)果傳回地面;最終由地面任務(wù)系統(tǒng)處理結(jié)果數(shù)據(jù),獲得戰(zhàn)場態(tài)勢[4-5]。
隨著衛(wèi)星技術(shù)在軍事領(lǐng)域的應(yīng)用,衛(wèi)星支援下的體系化作戰(zhàn)已逐漸成為一種新型的作戰(zhàn)模式[6-10]。在此背景下,如何開展敏捷成像衛(wèi)星作戰(zhàn)運用下的體系對抗仿真、研究這一新式作戰(zhàn)模式成為該領(lǐng)域新興研究熱點。但實際成像衛(wèi)星系統(tǒng)功能組成及運作機理復(fù)雜,據(jù)此建立的細(xì)粒度數(shù)字衛(wèi)星模型往往重視分系統(tǒng)細(xì)節(jié),并未考慮與作戰(zhàn)系統(tǒng)的互聯(lián)接口,導(dǎo)致所建立的衛(wèi)星仿真系統(tǒng)要素欠缺、靈活性與拓展性差,無法與其他體系仿真要素直接集成,難以支撐體系級作戰(zhàn)仿真。因此,建立適用于體系仿真的敏捷成像衛(wèi)星系統(tǒng)仿真模型具有現(xiàn)實意義[11-16]。
1 建模對象分析
敏捷成像衛(wèi)星系統(tǒng)由空間段的敏捷成像衛(wèi)星以及地面段的接收遙測與任務(wù)系統(tǒng)組成。成像衛(wèi)星主要包括平臺、動力系統(tǒng)、電荷耦合器件、光學(xué)載荷傳感器、通信設(shè)備等組件模塊,負(fù)責(zé)空間軌道保持、成像任務(wù)執(zhí)行及態(tài)勢數(shù)據(jù)回傳任務(wù);遙測系統(tǒng)主要指地面站系統(tǒng),包括數(shù)據(jù)處理及轉(zhuǎn)發(fā)模塊,主要用于數(shù)據(jù)接收及指令上行;任務(wù)系統(tǒng)主要包括成像衛(wèi)星任務(wù)規(guī)劃模塊及回傳數(shù)據(jù)處理模塊,負(fù)責(zé)衛(wèi)星任務(wù)的生成及控制、情報信息接收處理。
敏捷成像衛(wèi)星系統(tǒng)支援下的典型作戰(zhàn)工作流程如圖1所示。

圖1 敏捷成像衛(wèi)星系統(tǒng)支援下的典型作戰(zhàn)工作流程Fig.1 Typical operation workflow supported by agile imaging satellite systems
典型作戰(zhàn)工作流程可分為以下幾個階段。(1)作戰(zhàn)任務(wù)獲取與成像任務(wù)生成階段:地面任務(wù)系統(tǒng)接收作戰(zhàn)指揮系統(tǒng)的作戰(zhàn)任務(wù)信息,通過目標(biāo)區(qū)域分解、任務(wù)規(guī)劃等生成衛(wèi)星任務(wù)序列,并對應(yīng)產(chǎn)生指向轉(zhuǎn)移等控制指令序列;(2)指令上傳階段:地面任務(wù)系統(tǒng)根據(jù)規(guī)劃后的衛(wèi)星成像任務(wù)時序,通過地面站系統(tǒng)向敏捷成像衛(wèi)星傳遞指向控制指令序列;(3)對地成像階段:敏捷成像衛(wèi)星根據(jù)任務(wù)系統(tǒng)上傳的指令信息擺動傳感器,執(zhí)行對地成像任務(wù);(4)成像數(shù)據(jù)下傳階段:敏捷成像衛(wèi)星通過通信設(shè)備將成像數(shù)據(jù)下傳至地面站,再由地面站將數(shù)據(jù)轉(zhuǎn)發(fā)至地面任務(wù)系統(tǒng);(5)成像數(shù)據(jù)處理階段:地面任務(wù)系統(tǒng)從接收的成像數(shù)據(jù)中處理獲取目標(biāo)信息,將目標(biāo)信息報送作戰(zhàn)指揮系統(tǒng)。
2 建模過程
2.1 總體設(shè)計
通過建模對象分析,將敏捷成像衛(wèi)星系統(tǒng)建模轉(zhuǎn)化為對敏捷成像衛(wèi)星與地面系統(tǒng)的建模,基于組件化建模方法及敏捷成像衛(wèi)星支援下的作戰(zhàn)活動流程分析完成系統(tǒng)集成構(gòu)建。敏捷成像衛(wèi)星系統(tǒng)建模總體設(shè)計如圖2所示。
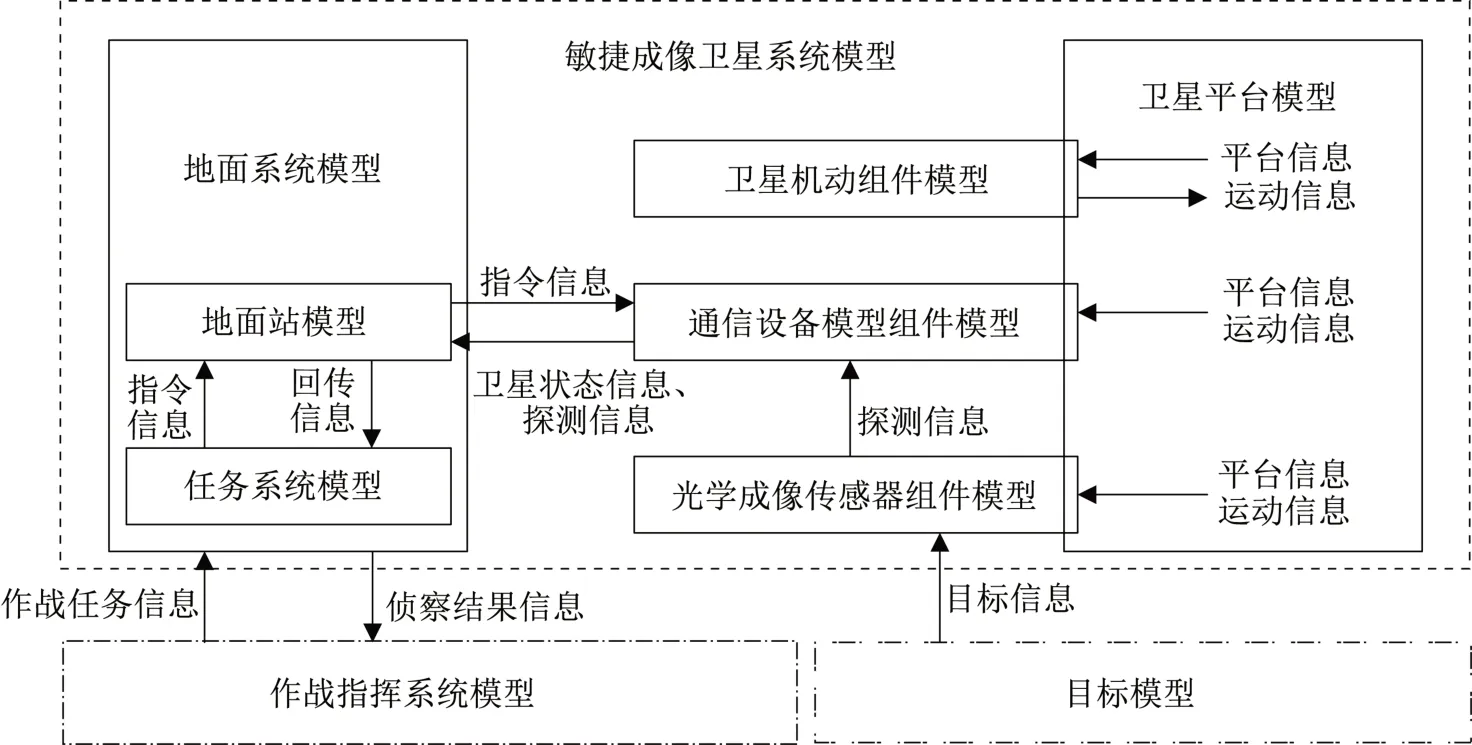
圖2 敏捷成像衛(wèi)星系統(tǒng)建模總體設(shè)計Fig.2 Overall design of modeling for agile imaging satellite systems
基于組件化建模方法,將敏捷成像衛(wèi)星模型拆分成衛(wèi)星平臺模型、衛(wèi)星機動組件模型、光學(xué)成像傳感器組件模型、通信設(shè)備組件模型,各組件通過參數(shù)化配置實現(xiàn)模型快速生成,經(jīng)接口組裝即可配置成敏捷成像衛(wèi)星模型。按功能組成將地面系統(tǒng)模型分為地面站模型與任務(wù)系統(tǒng)模型,模擬地面系統(tǒng)的系統(tǒng)功能及工作流程。
2.2 敏捷成像衛(wèi)星建模
2.2.1 衛(wèi)星平臺建模
衛(wèi)星平臺模型主要實現(xiàn)整星姿態(tài)轉(zhuǎn)移、電量及存儲容量管理等功能,計算輸出衛(wèi)星當(dāng)前指向姿態(tài)、實時存儲及電量等平臺信息。
(1)姿態(tài)機動能力。當(dāng)點到點機動時,衛(wèi)星姿態(tài)機動速度如表1所示,表1中機動角度及機動并穩(wěn)定時間為輸入?yún)?shù)。

表1 衛(wèi)星點到點機動速度Tab.1 Satellite point-to-point maneuvering speed
擺動成像的機動角度φ由歐拉軸/角參數(shù)式求取,對應(yīng)的機動并穩(wěn)定時間t可通過表1利用線性插值獲得。
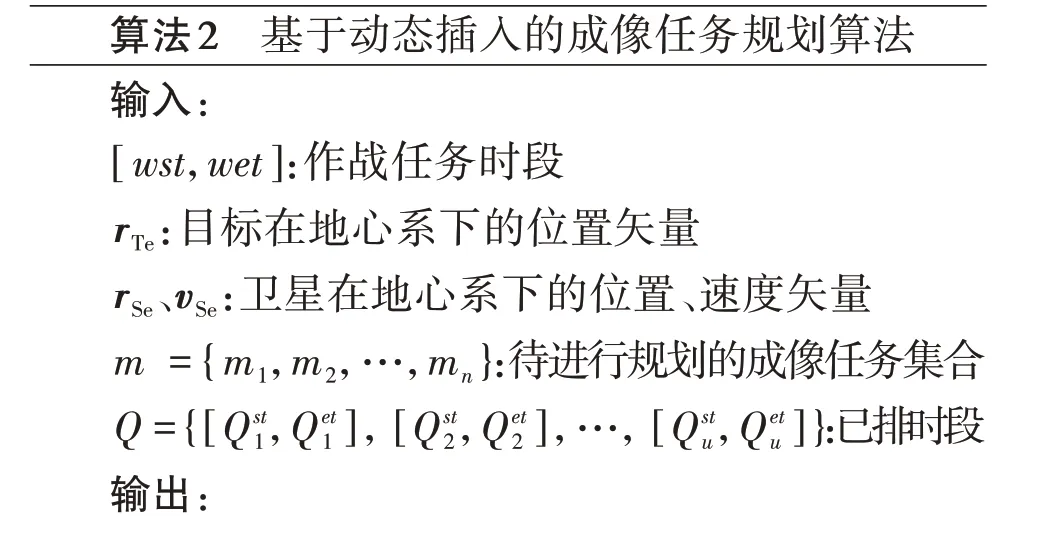
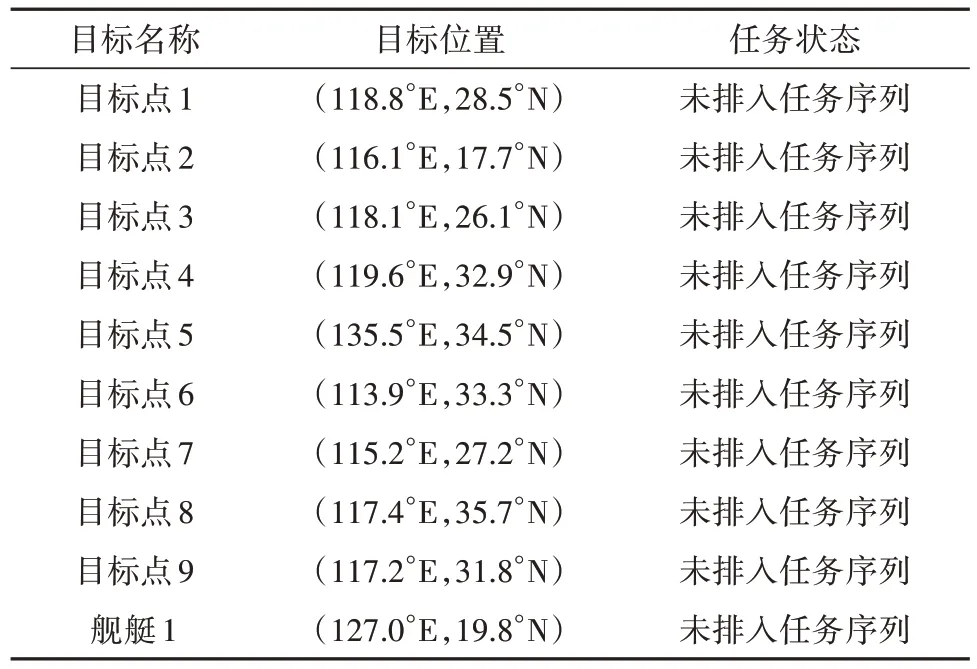
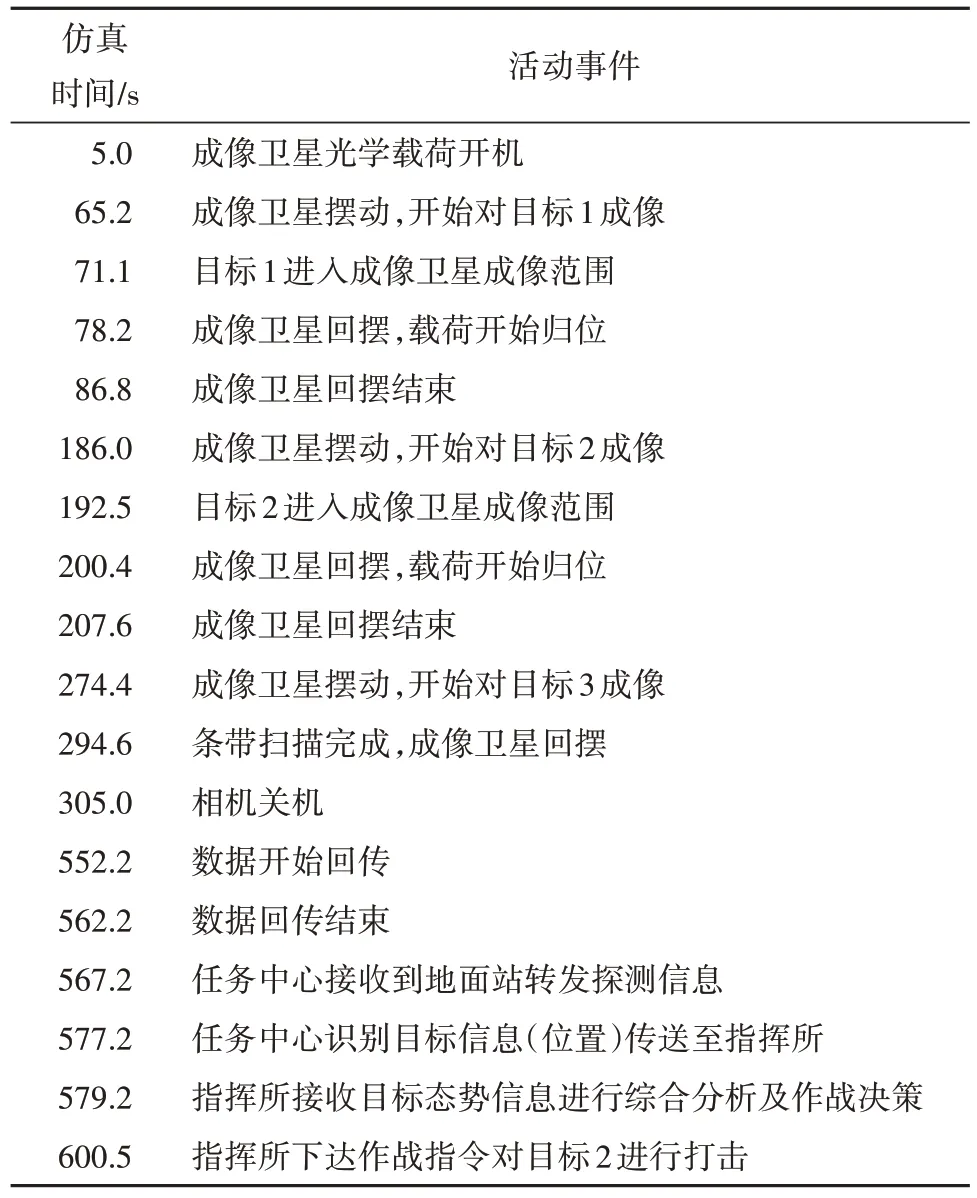
(2)電量維護。假設(shè)電池單位時間充電量為Pc,光學(xué)載荷工作單位時間耗電量為Ph,滿電容量為Pmax,設(shè)仿真過程的實時電量為P(t),且P(t) 式(1)中Δt為仿真周期;xt為非地影標(biāo)志,xt= 0表示衛(wèi)星當(dāng)前在地影內(nèi),xt= 1 表示衛(wèi)星當(dāng)前不在地影內(nèi);yt表示衛(wèi)星當(dāng)前工作狀態(tài),yt= 0 表示衛(wèi)星當(dāng)前未成像,yt= 1表示衛(wèi)星當(dāng)前正在成像。 (3)存儲維護。假設(shè)光學(xué)載荷工作單位時間數(shù)據(jù)產(chǎn)生量為Ds,回傳速率為Dc,固存滿載容量為Dmax,設(shè)仿真過程的實時可用存儲為D(t),且D(t) 式(2)中zt為回傳標(biāo)志,zt= 1 表示衛(wèi)星當(dāng)前已回傳,zt= 0表示衛(wèi)星當(dāng)前未回傳。 2.2.2 衛(wèi)星機動組件建模 衛(wèi)星機動組件模型主要實現(xiàn)衛(wèi)星軌道運動的模擬。為滿足體系對抗仿真需求,保證一定的推算精度,基于J2攝動模型,利用經(jīng)典軌道六根數(shù)(a,e,ω,i,Ω,f)與衛(wèi)星地心慣性系的轉(zhuǎn)換關(guān)系,在輸入六根數(shù)的情況下,積分推算衛(wèi)星軌道參數(shù),六根數(shù)中a為軌道半長軸、e為軌道偏心率、ω為近地點輻角、i為軌道傾角、Ω為升交點赤經(jīng)、f為真近點角。考慮地球形狀J2攝動的軌道動力學(xué)微分方程見式(3)。 式(3)中,vSi=[vx vy vz]T、rSi=[x y z]T為衛(wèi)星在地心慣性坐標(biāo)系下的速度與位置矢量,Re為地球半徑,μ為地心引力常數(shù)。 采用RK4 的方法,即可在仿真驅(qū)動下完成軌道積分推算,輸出衛(wèi)星平臺的運動信息。 2.2.3 光學(xué)成像傳感器組件建模 光學(xué)成像傳感器組件模型主要模擬電荷耦合器件相機的成像過程及成像能力。為適應(yīng)體系仿真需求,將成像輸出結(jié)果轉(zhuǎn)換成目標(biāo)檢測結(jié)果,模型的解算方法流程見算法1。 其中,利用星地幾何求取目標(biāo)的視線角度,即目標(biāo)指向與本體系z軸的夾角αT。若目標(biāo)在傳感器的視場內(nèi),需滿足 式(4)中,α(t)為光學(xué)傳感器視軸當(dāng)前指向角,β為光學(xué)傳感器視場角。 衛(wèi)星擺動成像圖像分辨率計算公式為 |rSe算法1 光學(xué)成像傳感器組件模型解算方法輸入:rTe、rSe:目標(biāo)、衛(wèi)星在地心系下的位置矢量opT:目標(biāo)的光學(xué)特性信息poS:光學(xué)成像傳感器指向矢量輸出:od:光學(xué)成像傳感器探測結(jié)果1 初始算法參數(shù)2 求目標(biāo)視線角αT ←a cos[rTe ?rSe/|rTe|×]|)3 求傳感器擺角α(t)←a cos[]poS×rSe/()||poS×| |rSe 4 if |αT - α(t)|< β/2 then 5 判定目標(biāo)在視場內(nèi)od1 ←1 6 求成像分辨率od2 ←ω ←(δ2 - δ1)?r 7 求目標(biāo)位置信息od3 ←rTe + σ 8 if od2 ≤ωmin then 9 判定目標(biāo)可被檢出od4 ←1 10 else 11 判定目標(biāo)不可被檢出od4 ←0 12 end if 13 od ←(od1 od2 od3 od4)14 else 15 od ←(0 0 0 0)16 end if 17 return od 式(5)中,r為光學(xué)傳感器星下分辨率,RS為衛(wèi)星地心距。 在視場檢查的基礎(chǔ)上,由成像圖像分辨率與最小可檢測分辨率ωmin的相對大小即可判斷目標(biāo)可否被探測到,再通過定位準(zhǔn)確度σ疊加探測誤差獲取定位結(jié)果,最終輸出探測結(jié)果信息od,包括目標(biāo)是否在傳感器視場內(nèi)od1、成像分辨率od2、目標(biāo)位置od3、是否可檢出od4。 2.2.4 衛(wèi)星通信組件建模 通信設(shè)備組件模型主要模擬衛(wèi)星通信過程,將光學(xué)傳感器的探測信息傳送至地面系統(tǒng),并接收來自地面系統(tǒng)的指令信息,針對體系仿真的需求,只模擬通信數(shù)據(jù)收發(fā)過程及通信延遲效果。 2.3.1 地面站建模 地面站模型主要模擬地面站系統(tǒng)的通信過程,接收衛(wèi)星數(shù)據(jù)上傳,并上傳指令信息,針對體系仿真的需求,只模擬地面站通信數(shù)據(jù)收發(fā)過程及通信延遲效果。 2.3.2 任務(wù)系統(tǒng)建模 任務(wù)系統(tǒng)模型主要模擬成像任務(wù)生成、任務(wù)規(guī)劃等工作過程。 (1)成像任務(wù)生成。針對指揮系統(tǒng)模型下達的點目標(biāo)偵察、區(qū)域目標(biāo)搜索等作戰(zhàn)任務(wù),將其中的區(qū)域目標(biāo)通過區(qū)域分解等方法將作戰(zhàn)任務(wù)區(qū)域劃分為光學(xué)載荷能夠單幅成像覆蓋的成像任務(wù),利用光學(xué)載荷的點成像模式、推掃成像模式完成成像任務(wù)。 圖3 為等幅寬區(qū)域任務(wù)分解及推掃過程示意圖。d為星下幅寬,可利用式(6)計算得到。 圖3 區(qū)域任務(wù)分解及推掃過程示意圖Fig.3 Schematic diagram of regional task decomposition and push-broom process (2)成像任務(wù)規(guī)劃。體系仿真過程中作戰(zhàn)任務(wù)具有在線分配的動態(tài)性,同時需要實現(xiàn)任務(wù)規(guī)劃過程的高效自動化解算。基于此,需要在考慮成像約束條件的前提下,根據(jù)衛(wèi)星的任務(wù)狀態(tài)以及新晉任務(wù)的屬性特征完成敏捷衛(wèi)星成像任務(wù)規(guī)劃。基于動態(tài)插入的成像任務(wù)規(guī)劃算法的運行流程見算法2。 算法2 基于動態(tài)插入的成像任務(wù)規(guī)劃算法輸入:[wst,wet]:作戰(zhàn)任務(wù)時段rTe:目標(biāo)在地心系下的位置矢量rSe、vSe:衛(wèi)星在地心系下的位置、速度矢量m ={m1,m2,…,mn}:待進行規(guī)劃的成像任務(wù)集合Q={[Qst1,Qet1],[Qst2,Qet2],…,[Qstu,Qetu]}:已排時段輸出: 算法2 中,輸入的待規(guī)劃成像任務(wù)集為m={m1,m2,…,mn},作戰(zhàn)任務(wù)時段為[wst,wet],已經(jīng)安排的任務(wù)M={M1,M2,…,Mu},Q=為對應(yīng)的成像任務(wù)時序,表示已安排任務(wù)Mj的開始成像時間與結(jié)束成像時間,1 ≤j≤u。在每個仿真周期內(nèi),當(dāng)經(jīng)新晉任務(wù)不為空時,按照以下步驟進行任務(wù)規(guī)劃: step1:按優(yōu)先級先后從m中取待規(guī)劃成像任務(wù)mi,0 step2:根據(jù)mi的任務(wù)區(qū)域長度Li及傳感器對地成像掃描速度v計算成像任務(wù)用時cti,cti=Li/v。若成像任務(wù)為點成像任務(wù),則Li=d; step3:在[lsti,leti]內(nèi),確定成像任務(wù)插入點,選取成像時段[sti,eti]。 若[lsti,leti]內(nèi)已排成像任務(wù)占用時間為Q′=對應(yīng)可用時間為在Q″內(nèi),按照由前向后的順序,判斷各時段的時間長度是否大于cti+pt,pt為成像準(zhǔn)備時間,若某時段Q″j=的時間長度大于cti+pt,則進行成像約束檢查,成像約束包括以下幾種。 (1)擺動約束:成像過程的傳感器擺動角度應(yīng)在機械擺動限幅內(nèi),即 其中,αi為執(zhí)行任務(wù)mi時傳感器的擺角,αmax為機械擺動限幅。 (2)電量及存儲約束:插入任務(wù)mi后的任務(wù)序列對衛(wèi)星電量及存儲的消耗需要滿足閾值限制,即 其中,Ptmax表示傳感器的單軌最大成像時長,Dtmax表示最大允許存儲量。 (3)太陽高度角約束:光學(xué)任務(wù)指定成像的太陽高度角的范圍,以保證圖像質(zhì)量,即 其中,γi為執(zhí)行任務(wù)mi時的太陽高度角,γmin為保證一定圖像質(zhì)量的最低太陽高度角。 在Q″內(nèi),若某時段Q″j的時間長度小于cti+pt,則按上述過程繼續(xù)下一時段元素Q″j+1的判斷,直至尾元素,輸出計算結(jié)果。 在構(gòu)建敏捷成像衛(wèi)星系統(tǒng)仿真模型的基礎(chǔ)上,根據(jù)總體設(shè)計,集成敏捷成像衛(wèi)星系統(tǒng)仿真系統(tǒng),基于仿真系統(tǒng)開展仿真驗證試驗,檢驗所建立模型的準(zhǔn)確性以及在作戰(zhàn)體系仿真中的實用性。 仿真參數(shù)設(shè)置如表2所示。 表2 仿真參數(shù)設(shè)置Tab.2 Simulation parameters setting (1)衛(wèi)星機動組件模型驗證。采用STK軟件對比試驗對衛(wèi)星機動組件模型準(zhǔn)確性進行驗證。仿真衛(wèi)星軌位與STK運行結(jié)果的對比如圖4所示,圖4中橫坐標(biāo)為時間,縱坐標(biāo)為位置相對誤差,從圖4中可以看出,各方向的相對位置誤差均低于0.01%,能夠滿足體系仿真需求。 圖4 衛(wèi)星仿真位置對比誤差Fig.4 Position comparison error of satellite simulation (2)其他模型驗證。仿真參數(shù)設(shè)置同表2,選取同軌多點目標(biāo)場景進行模型仿真試驗,主要驗證敏捷成像衛(wèi)星模型與地面系統(tǒng)模型的設(shè)計合理性與準(zhǔn)確性。仿真目標(biāo)設(shè)置如表3所示。 表3 衛(wèi)星成像任務(wù)設(shè)置Tab.3 Imaging task of satellite 仿真過程中,系統(tǒng)經(jīng)任務(wù)規(guī)劃仿真得到的任務(wù)序列為:“艦艇1→目標(biāo)點2→目標(biāo)點3→目標(biāo)點7→目標(biāo)點1→目標(biāo)點5→目標(biāo)點9→目標(biāo)點4→目標(biāo)點6→目標(biāo)點8”。仿真結(jié)果顯示,衛(wèi)星依次沿上述任務(wù)序列進行過境成像,仿真結(jié)果與設(shè)計預(yù)期相符,表明成像任務(wù)規(guī)劃方法以及任務(wù)系統(tǒng)模型準(zhǔn)確有效,仿真過程成像路徑如圖5所示。 圖5 多點目標(biāo)場景仿真成像路徑Fig.5 Simulation imaging path of multi-point target scene 仿真成像過程中,衛(wèi)星傳感器指向角變化過程如圖6-7 所示。圖中覆色區(qū)域為傳感器姿態(tài)轉(zhuǎn)移限幅范圍,從中可以看出,傳感器能夠根據(jù)任務(wù)序列對每個任務(wù)進行擺動成像,傳感器指向轉(zhuǎn)移過程滿足姿態(tài)幅度限制以及機動能力約束,設(shè)計結(jié)果合理,各模型可滿足體系仿真對敏捷成像衛(wèi)星的應(yīng)用需求。 圖6 傳感器指向俯仰角變化曲線Fig.6 Change curve of sensor pointing pitch 圖7 傳感器指向方位角變化曲線Fig.7 Change curve of sensor pointing azimuth 仿真參數(shù)設(shè)置同表2,衛(wèi)星成像任務(wù)設(shè)置如表4所示,仿真過程活動事件記錄如表5所示。 表4 衛(wèi)星成像任務(wù)設(shè)置Tab.4 Imaging task of satellite 表5 仿真過程信息Tab.5 Information of Simulation process 從表5 中可以看出,所構(gòu)建的敏捷成像衛(wèi)星系統(tǒng)模型可功能模擬衛(wèi)星軌道運動、載荷探測、通信傳輸、作戰(zhàn)支持等工作活動。在仿真場景中,目標(biāo)2 作為新增任務(wù),被排入成像任務(wù)隊列,衛(wèi)星以“點目標(biāo)-目標(biāo)1->點目標(biāo)-目標(biāo)2->區(qū)域目標(biāo)-目標(biāo)3”的順序依次完成成像任務(wù),并最終以目標(biāo)2 作為打擊目標(biāo)實施作戰(zhàn)。仿真過程及結(jié)果表明,所構(gòu)建的敏捷成像衛(wèi)星仿真系統(tǒng)可有效支撐天基信息支援作戰(zhàn)體系仿真。敏捷成像衛(wèi)星仿真過程如圖8所示。 圖8 敏捷成像衛(wèi)星仿真過程Fig.8 Simulation process of agile imaging satellite system 基于體系對抗的仿真應(yīng)用背景,本研究采用組件化建模方法構(gòu)建了敏捷成像衛(wèi)星平臺模型、衛(wèi)星機動組件模型、光學(xué)成像傳感器組件模型、通信設(shè)備組件模型,設(shè)計構(gòu)建了衛(wèi)星地面站模型以及基于任務(wù)動態(tài)插入的敏捷成像衛(wèi)星地面任務(wù)系統(tǒng)模型,在集成敏捷成像衛(wèi)星系統(tǒng)仿真系統(tǒng)的基礎(chǔ)上,通過仿真試驗驗證了所構(gòu)建的敏捷成像衛(wèi)星系統(tǒng)模型能夠?qū)崿F(xiàn)自動化成像任務(wù)編排,模擬敏捷成像偵察過程,滿足衛(wèi)星作戰(zhàn)運用背景下的體系對抗仿真需求。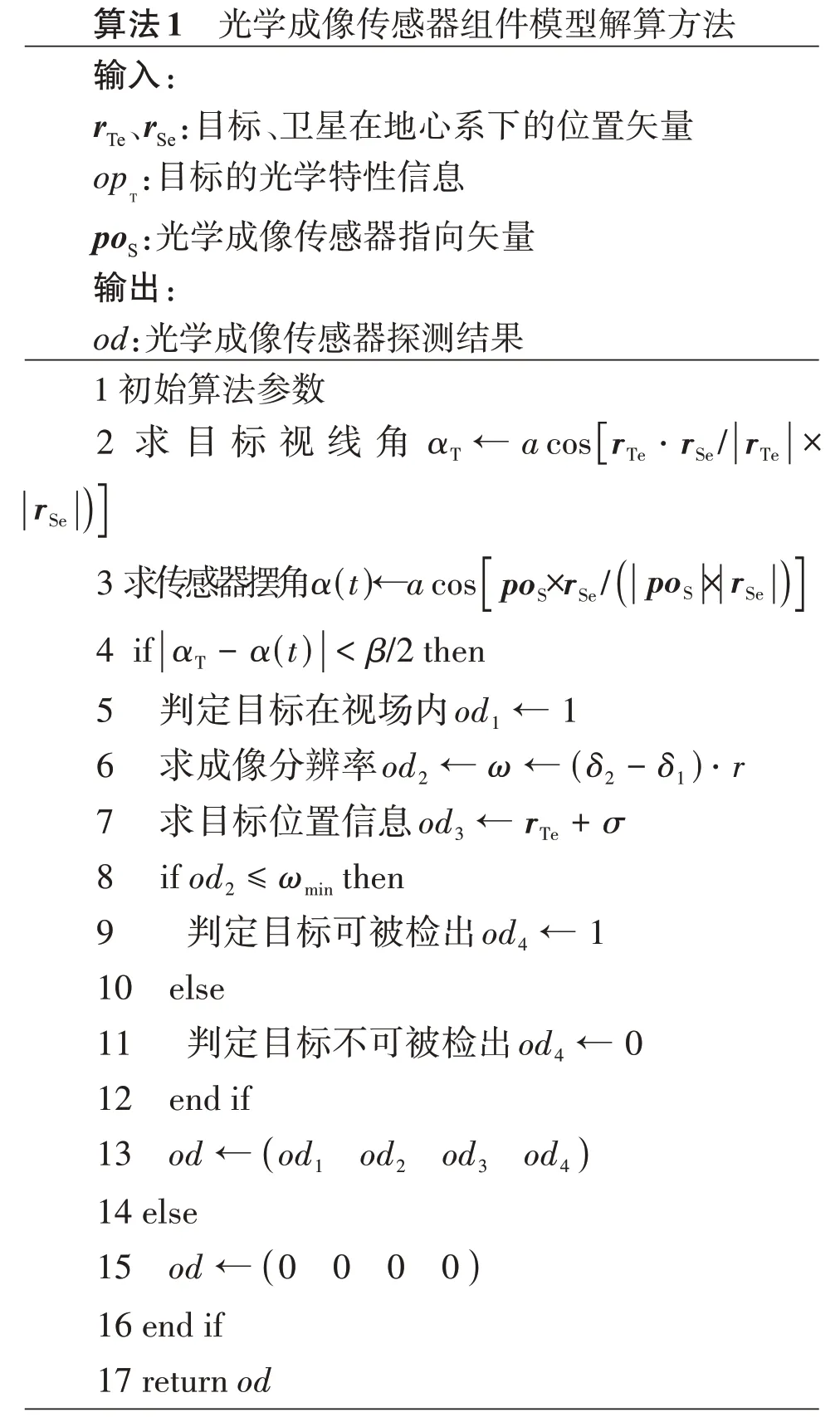
2.3 地面系統(tǒng)建模

3 仿真試驗
3.1 模型準(zhǔn)確性驗證





3.2 體系仿真應(yīng)用


4 結(jié) 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45光學(xué)精密工程(2016年6期)2016-11-07 09:07:19