單向直流電力系統QPR并網多環控制研究
2023-09-11 01:07:48廣東省機械技師學院戚海艷
電力設備管理 2023年15期
廣東省機械技師學院 戚海艷
1 引言
電力系統是由電能的產生、變換、傳送、分配和消費的各種設備,按照一定的需求組成的有機系統的總稱,是大型機電系統不可或缺的重要組成部分,也是用電設備協調工作的關鍵所在。電力系統應能夠保證供電穩定可靠,電壓等重要參數要穩定;電壓和頻率要在一定的安全范圍內運行;同時,要確保在各個機械裝備能夠正常工作的情況下使電力系統中的能量損耗盡可能小[1-2]。能饋型電力電子負載可具有將測試后剩余的電能回饋至電網,實現電能的二次循環利用的功能,同時亦可實現傳統線性負載和非線性負載功能[3],但LCL 型負載的并網逆變器諧振特性會導致的并網電流中低頻諧波問題,因此國內外許多學者對如何抑制諧波和改善電力系統性能進行了大量研究。CHENY[4]等進行了LCL 型并網逆變器的研究,為了改善系統的動態特性,提出了一種電網電流反饋主動阻尼(AD)的優化設計方法。
通過對等效虛擬阻抗模型的分析,得出了系統動態特性指標與阻尼控制參數之間的本質關系,并提出了一種結合零極點模型和勞斯穩定性準則的參數優化設計方法,以降低參數設計的復雜性,提高系統的動態性能。此外,在離散域分析了控制時滯對系統穩定性和參數設計的影響,通過仿真和實驗結果驗證了方法的有效性,為本文的QPR 并網多環控制模型建立和仿真研究提供了參考。KHAN D 等論述了逆變器是分布式能源裝置的重要組成部分,其中LCL 濾波器是電網接口的最新應用。然而,與LCL 濾波器相關的具有挑戰性的諧振問題惡化了動態控制特性,并影響了電壓源逆變器系統的穩定性,因此逆變器控制的正確設計對于確保穩態運行和高質量的電網注入電流起著重要作用。文中提出了一種不同的逆變器控制設計方法,通過改變內部阻尼回路結構來提高逆變器系統的阻尼和穩定性,通過LCL 濾波網絡和濾波電容電流反饋回路采用改進的補償器,然后在并網逆變器系統的參考點處傳回所產生的增強裝置的輸出,以抑制不必要的諧振尖峰,并研究了開環電流環的穩定裕度和控制性能,通過實驗室原型驗證了方案的有效性,為本文的模型建立提供了參考。
本文為有效改善LCL 并網逆變器的低頻諧波等問題,分析得出電流內環、諧振控制和電壓全前饋的多環控制模型;得出了電流內環控制等效簡化模型和電壓全前饋等效簡化控制模型,并給出其傳遞函數。最后在MATLAB 中搭建70kW 單向直流電力系統QPR 并網多環控制模型,進行仿真研究。
2 控制模型
2.1 單向并網逆變器拓撲結構
單向直流并網逆變器拓撲結構如圖 1所示,圖中包含了前級負載母線電壓Ud;Cd為直流母線電容;L1為逆變器濾波電感,L2為并網側濾波電感,Cf為逆變器濾波電容;U為電網電壓;母線電壓外環可保證逆變器順利并入電網,PLL 鎖相環用于獲得電網電壓的相位角。
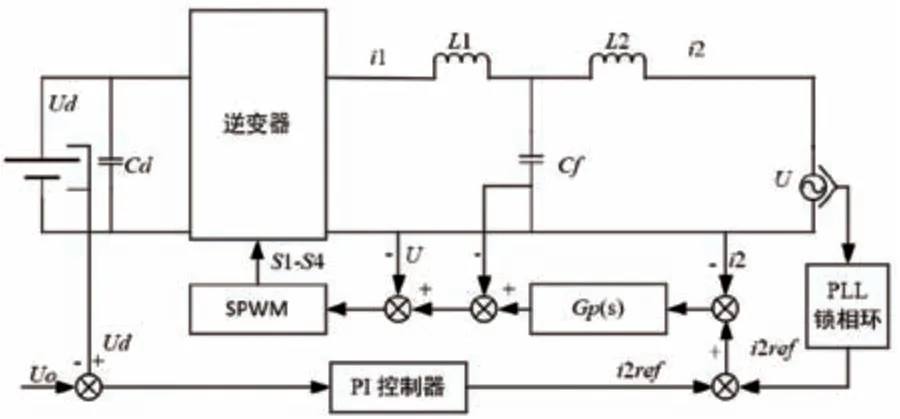
圖1 單向直流并網逆變器拓撲結構
根據單向直流并網逆變器拓撲結構圖,設電網電壓相位角為θ,與電壓外環輸出的電流I2ref相乘作為參考電流i2ref。Gp(s)為電流調節器。
2.2 電流內環控制簡化模型
忽略外環和內環控制系統模型的時間常數影響,可認為電壓外環控制和內環控制本身是解耦的,采用常用的PID 控制算法即可獲得較好的控制效果,設kp、TI、TD分別為PID 算法的比例系數、為積分時間常數、為微分時間常數,則PID 控制算法的解析傳遞函數表達式為:
考慮并網逆變器的采樣和開關頻率遠遠大于國家電網規定的50Hz 頻率,可將電流內環控制的逆變器環節等效為一個增益環節:
式中,Uz為載波信號電壓幅值。
因此可得電流內環控制的簡化模型如圖2所示。可得控制模型傳遞函數為:
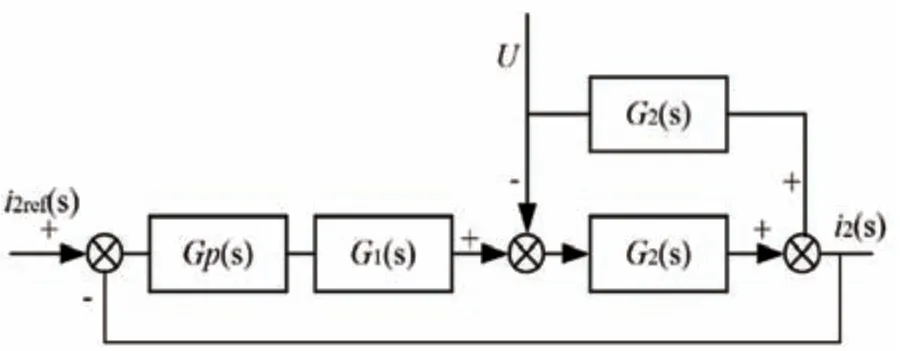
圖3 電壓全前饋控制模型
式中,G1(s)為控制傳遞函數;G2(s)為LCL 濾波器函數。
從而可得并網電流i2(s)為:
2.3 電容電流反饋模型
根據單向直流并網逆變器拓撲結構,可得LCL負載的傳遞函數為:
根據圖2在加入電容電流反饋后,其傳遞函數為:
2.4 QPR 控制模型
為了改進PID 控制算法,在PID 控制器中加入兩個具有固定頻率的閉環極點,增大極點的增益,建立具有一定諧振頻率的比例諧振控制器(PR),其傳遞函數表達式為:
式中,kr為諧振增益;ωh為諧振頻率;fc為控制系統截止頻率。
為了增加PR 控制器的控制帶寬,引入ωc為諧振頻率帶寬變量,得到一種高帶寬的QPR 控制器,其傳遞函數模型為:
2.5 電壓全前饋控制模型
前饋控制可提高控制系統的跟蹤性能,在高精度的控制系統中被廣泛應用。基于控制理論的復合控制思想,當閉環系統是一個連續系統時,讓前饋環節與閉環控制系統的傳遞函數的乘積為1,在理論上即可實現系統輸出與系統的輸入完全復現。本文基于前饋控制思想,將LCL 濾波器傳遞函數向前反饋值電網電壓端,如圖 3所示。可得電壓全前饋控制模型的傳遞函數為:
式中,Kpa為電壓全前饋控制模型的常數項,其表達式為:
將式帶入式可得:
由式可知,電壓全前饋傳遞函數模型的多項式系數分別為:
3 基于Simulink 的仿真分析
在MATLAB Simulink 中搭建控制仿真模型,設置單向交流電的母線電壓為600V;按國家電網的電網頻率50Hz 設置電力系統;電網電壓設置為常用的380V 工業用電電壓;設置LCL 逆變器的電感L1和L2分別為500uH 和300uH,電容Cf為42uF。設置諧振控制器常數項kp為43,在Simulink 環境中設置仿真總時間為0.1s,即進行5個周期的仿真試驗,在時間0.05s 時讓并網電流突減小至原來的0.5倍。得到并網電壓和并網電流變化曲線如圖4所示。
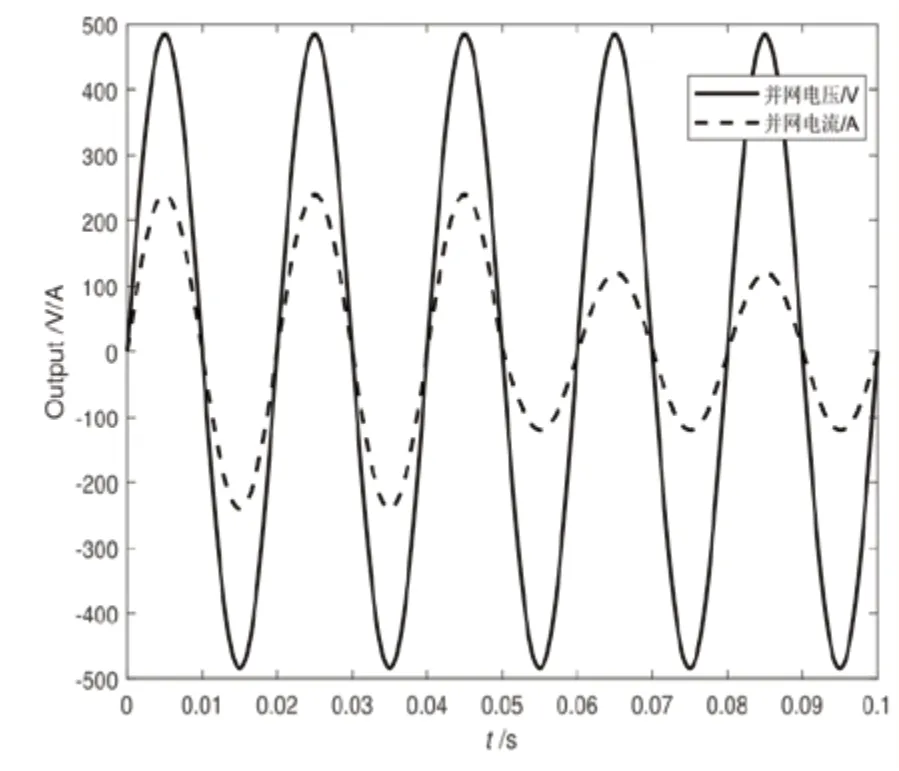
圖4 MATLAB Simulink 仿真結果曲線
可知并網電壓呈明顯的正弦變化規律,變化波形曲線平滑,變化周期為0.02s,與國家電網的50Hz 頻率相對應,符合實際情況。并網電壓的變化幅值約484V。并網電流呈現的正弦變化規律,變化波形曲線平滑,變化周期為0.02s,與國家電網的50Hz 頻率相對應,符合實際情況,在0.05s 時將并網電流突然減小至原來的0.5倍,并網電壓仍平滑變化,未產生明顯的毛刺振蕩現象,說明文中采用的多環控制模型較好地抑制了諧振等現象,改善了電力系統性能。
4 結語
本文參考以往文獻,由單向直流并網逆變器拓撲結構得出電流控制模型方框圖和電壓全前饋控制模型方框圖,并推導了電流內環控制模型和電壓全前饋控制模型的傳遞函數,給出了并網電流計算公式和電壓全前饋傳遞函數拉普拉斯多項式表達式。建立QPR 控制模型,實現了控制系統抗諧振控制,并提高了諧振帶寬。將MATLAB 仿真得出并網電壓和并網電流變化平滑的仿真結果,實現了控制目的,為單向直流電力系統QPR 并網多環控制研究提供了參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19