多旋翼無人機飛控系統硬件架構設計研究
2023-09-11 08:00:44周飛
電子制作 2023年15期
周飛
(上海蔚蘭動力科技有限公司,上海,201103)
飛控系統(Flight Control System)是無人機的大腦,多軸無人機的飛行計劃,姿態變化控制等都是由飛機上的傳感器系統傳回飛控系統,經過飛控的運算和判斷,下達相關指令,由執行機構完成動作和飛行姿態調整。典型的飛控系統組成如圖1 所示。

圖1 典型的飛控系統架構
隨著高集成度,高性能傳感器及處理器的快速發展,當前行業無人機市場如巡檢,測繪,農業機械等對無人機的需求擴張迅猛,對高可靠性,高穩定的無人機解決方案需求迫切,當前的主流飛控系統架構主要是以固定配置非冗余設計的系統,架構簡單,處理能力較弱,對復雜飛行任務處理響應過慢,為提升飛控系統的可靠性及安全性,增強飛控系統的復雜任務處理能力,本文提供了一種基于Cortex M7 處理器的無人機飛控系統架構,從系統冗余設計,結構緊湊設計及關鍵器件選型三方面詳細闡述飛控的硬件架構設計。
1 飛控系統架構需求分析
無人機飛控系統主要由電源系統、控制系統、導航及數傳系統、驅動系統四大部分組成,結合可靠性、安全性、高性能、經濟性的系統要求,下面將飛控架構需求分解細化如下:
(1)電源系統:要求電源部分支持電池,本地直充,備用電池輸入三種電源供電方式,三種電源之間按設定優先級進行供電選擇,電源轉換模塊支持5~36V直流寬壓輸入;
(2)控制系統:是整個系統的運算控制中心,負責對外置的傳感器信號收集,并根據飛控算法輸出相應控制信號;同時包含通信總線組成的通信網絡,即與傳感器單元,遙控單元,攝影單元及本地調試設備間的通信,同時也包含冗余設計需要的雙控制板間通信;
(3)導航及數傳系統:是包含GPS,數傳,磁羅盤在內的獨立安裝的功能單元;
(4)驅動系統:主要是相應的IO 接口輸出驅動電機信號。
其中四部分功能單元根據實際可靠性設計需求,應都滿足冗余設計,即需要提供相應的通信接口,接入冗余備用功能單元,通過相應的軟件控制邏輯實現主備功能單元間的切換。
2 系統架構詳細設計
基于上述系統設計需求,綜合可靠性方面的考慮,本文分三部分進行相應的詳細設計:系統架構設計,硬件設計,軟件設計。
無人機飛控系統有區別于其他控制系統架構的設計難點:
(1)傳感器單元,特別是慣性測量傳感器單元對振動特別敏感,無人機電機振動對慣性測量單元影響較大;
(2)體積受限,無人機的續航能力受機身重量及體積影響較大,且重心設計也有一定影響;
(3)可靠性冗余設計,飛控系統的四大功能單元均有冗余設計的需求。
基于以上架構設計難點,結合系統架構設計需求,本方案提供了一種創新的架構設計,從模塊單元的功能,體積兩方面出發,將飛控系統根據模塊化設計原則分為五塊電路板:電源與驅動系統板、主控板、傳感器板、導航及數傳單元、通信切換板。
飛控系統的模塊化設計,極大提升了系統的配置靈活性,在模塊化設計過程中,需要根據模塊間通信的數據量和速率進行接口匹配,盡量減少板間連接器的引腳數量,系統架構框圖如圖2所示。
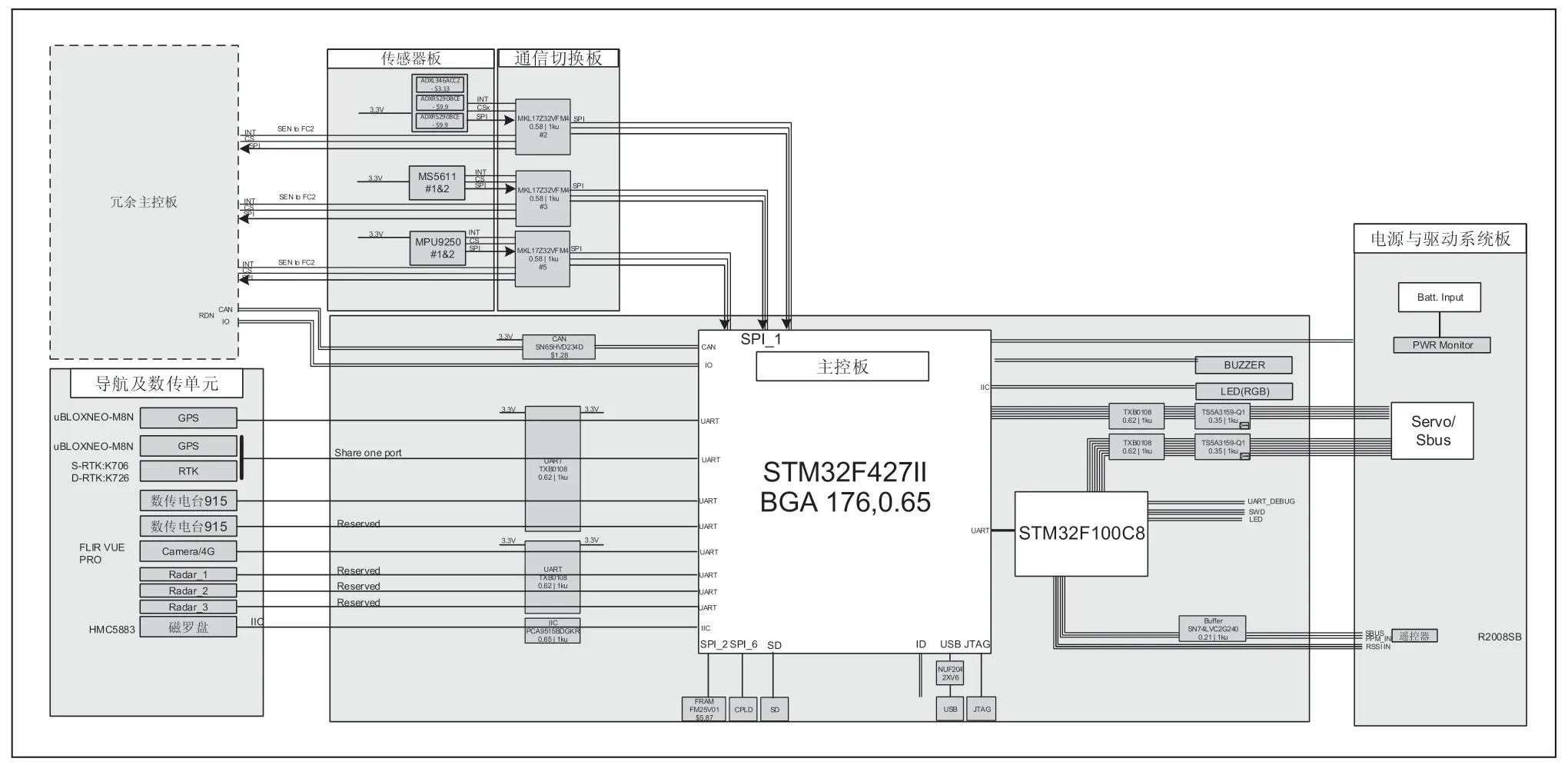
圖2 飛控系統硬件框圖及關鍵器件選型
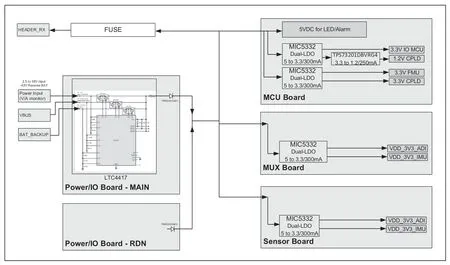
圖3 飛控系統電源子系統選型及邏輯圖
3 硬件設計
■3.1 電源與驅動板
電源與驅動板功能主要是負責電源輸入電壓轉換,輸出電機驅動信號及遙控設備等外部通信接口。根據實際需求,選擇ADI 的LTC4417 方 案,該方案支持輸入電壓范圍2.5V ~36V,從三路外部輸入電壓中選擇優先級較高的電源,有對電池反接提供-42V保護,方案本身有過壓欠壓保護,P 溝道MOSFET 柵極保護鉗位,24 腳窄體SSOP 封裝,體積較小,經此電源轉換芯片后電壓穩定為5V 電壓,驅動整個飛控系統電路。
電源系統中的電池部分,通過SHUNT 電阻實時監測電池的電流,通過電阻分壓監測電池的供電情況,此部分電壓與電流監測信號通過連接器傳遞到控制板的主MCU,通過主MCU 的ADC 通道進行實時的監測。
可靠性冗余設計方面,采用PMEG2010 二極管作為冗余隔離,支持備用電源系統接入,防止主電源系統LTC4417失效,二級降壓電路采用MIC5332 雙路LDO 方案,將主控芯片,IO 芯片,及傳感器芯片分開供電,減少供電電源間的干擾。
對于驅動功能,無人機電機驅動PWM 信號由從MCU輸出,從MCU提供8路PWM信號,為提升PWM的驅動能力,增加buffer 芯片TXS0108ERGYR,PWM 信號輸出經此處理還可以防浪涌反灌損壞MCU 芯片,也對PWM 上的噪聲信號有一定的抑制作用。此部分驅動信號經控制系統板輸出到電源板上連接器,通過線束與電機連接。在可靠性冗余設計方面,兩套獨立的控制系統輸出的驅動信號通過電源驅動板上的模擬開關進行切換輸出。
在PCB 設計上,因電源系統與驅動輸出的接口合并在同一塊PCB 上,連接器較多,為節省PCB 面積,提高電源板抗電磁干擾能力,PCB 采用四層板進行設計,疊層關系為信號(TOP)-參考地-電源-信號(BOT),其中信號(TOP)層因離完整的參考地最近,諸如驅動信號等關鍵信號優先布局在此層。
■3.2 主控板
單獨的主控板設計采用的是核心板的概念,將主控單元獨立設計成核心板,可以極大減少項目重復開發時間,方便移植到類似項目上,同時核心板設計屬于模塊化設計,為系統處理能力升級提供了基礎。
主控芯片方案的選型在考慮通信接口類型及數量,控制IO 數量,信號處理計算需求三個因素,采用雙MCU 方案,主MCU 采用Cortex M7 架構的STM32F427 芯片,主要用作通信功能,飛控算法處理,數據存儲功能,從MCU 采用STM32F100C8,重點作為驅動IO 處理,驅動電機工作。采用雙MCU 方案,可以降低主MCU 的引腳數量,降低對MCU 處理能力的需求,從而降低成本,同時將功能相對獨立的電機驅動信號分離到獨立的從MCU 上,通過功能專用的策略,提升飛控系統的實時性。
控制系統同時包含狀態指示電路,通過LED 燈將飛控板的狀態顯示出來,狀態顯示分為兩部分,一部分為本地顯示,即包含飛控板啟動狀態,調試告警信息等,這部分信息只能在無人機在地面調試,校準時才可以看到,另外一部分為高亮LED 燈指示,顯示飛行狀態即機頭方向,此部分可以在低空飛行時顯示,三色LED 驅動方案選擇TCA62724FMG。
飛控系統的通信分為板內通信和板外通信,板內主要是板載傳感器,狀態指示系統,存儲系統通信;板外通信主要是外接部分傳感器模塊,包含GPS 導航,數傳電臺,攝像頭,磁羅盤等。無人機的板內通信特點為通信數據量較少,速率要求不高,通用UART 串口通信完全可以滿足,但是要求的通信接口數量包含冗余通信接口數量達到7 路,包含GPSx2,數傳x2,攝像頭x1,4G 網絡x1,從MCUx1,SPI 串行高速總線數量為3 路,包含傳感器接口,本地存儲芯片接口和預留外置接口。
可靠性冗余設計方面,控制系統的冗余采用可靠性較高的CAN 總線進行通信,交互飛控執行數據,同時通過IO 接口進行主備信號檢測。在控制系統輸出方面,采用SPDT 模擬開關TS5A3159-Q1 進行信號切換,模擬開關的控制信號由主控系統控制,一旦切換至備用系統,則控制信號自動切換至默認上拉控制模式。
■3.3 傳感器板
此功能單元對安裝環境要求較高,工作環境中電信號噪聲,振動噪聲,溫度等變化會極大地影響傳感器功能單元的精度和穩定性,所以此電路板需要進行減震功能設計,獨立的電路板可以減少結構減震設計的難度,減少系統體積。
板載傳感器系統主要是慣性測量系統,氣壓監測系統,其中慣性測量系統是由9 軸姿態傳感器組成,包含3 軸加速度計,選型為ADI 的ADXL346ACCZ,3 軸磁力計,選型為IIS2MDC 和3 軸陀螺儀,選型為2 顆ADXRS290BCE,此9 軸組合性價比高,穩定性好,結合結構上的減震,性能完全可以滿足無人機需求。板載兩路氣壓傳感器,選型MS5611,傳感器板通過SPI 與控制系統通信。
PCB 設計方面,傳感器芯片基本只包含電源,中斷及SPI 通信走線,PCB 采用四層板,PCB 變形對傳感器精度影響較大,所以板厚1.6mm,因慣導傳感器均屬于MEMS微機電系統,所以在實際結構進行減震設計時,應避免減震材料與傳感器芯片接觸,保證芯片周圍空間足夠大,同時為精確監測無人機姿態,傳感器位置盡量居中防止,傳感器的X,Y,Z 軸方向盡量統一,以方面軟件開發。
■3.4 通信功能切換板
當系統需要主控板冗余設計時,同一套傳感器信號需要同時輸出給兩個主控板,此時需要保證信號傳輸的實時性,通信功能切換板可以通過高速串口信號實時將傳感器信號傳輸給兩個主控系統,此功能板在非冗余飛控系統中不需要安裝。
從經濟性的角度,切換板選擇NXP 的MKL17Z32VFM4為通信芯片,該芯片支持3 路SPI 通信接口,其中2 路設置為Master 模式,分別支持訪問獨立的2 套慣導系統,1路設置為Slave 模式,供控制系統訪問。板載傳感器增加選型MPU9250 作為第二套方案,兩套方案既可以做主備使用,也可以通過卡爾曼融合算法進行融合,提升系統姿態監測精度和穩定性。
■3.5 導航與數傳板
此功能板主要是支持外接的GPS 模塊,數傳模塊等,包含GPS/RTK GPS 模組(UBLOX M8N),磁羅盤模組(HMC5883),與慣性測量系統算法融合,提供精確的位置和導航信息,另外還有數傳電臺模組,4G 通信模組,攝像頭模組等功能單元,完成與地面站的通信。此類功能模塊對空間安裝要求高,需要空曠的空間以進行射頻通信。
創新的將飛控系統按功能單元及安裝要求進行模塊化設計,板間通過柔性線纜和插針連接器連接,可以極大縮小飛控系統電路板的水平面積,局部減震設計極大提升了傳感器單元的性能。
■3.6 小結
基于各硬件功能子單元選型及連接設計,圖4 對飛控子系統的板級連接進行說明,飛控系統最小核心設計為三塊電路板,即圖4 所示的電源板,主控板及傳感器板,基于系統可靠性的冗余設計,可以額外配置電源板與主控板,增加通信功能切換板,保證通信的實時性。
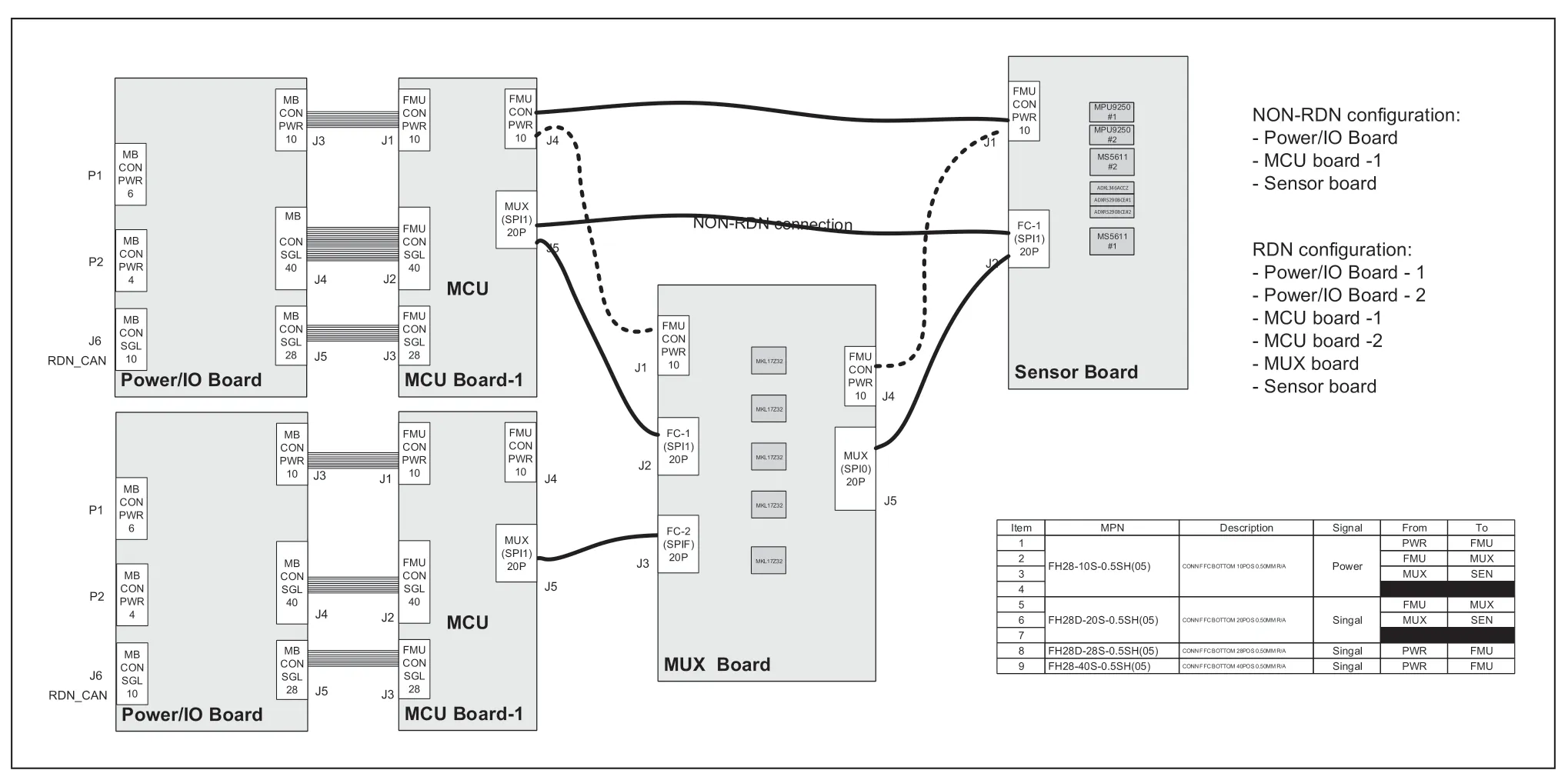
圖4 飛控系統硬件電路連接圖
4 飛控系統的軟件設計
飛行控制需要清晰的優先級設計和可靠的定時系統,通過使用多線程操作系統和高效的驅動程序與中斷優先級的正確調度來保證控制循環的精確執行。飛控軟件包含導航功能單元,航路規劃與制導功能單元,飛行管理功能單元,飛行控制功能單元及相關日志記錄數據存儲單元,目前大部分飛控系統基本上都是基于開源飛控資源進行的二次開發,主流的開源無人機飛控包括APM,PIXHAWK,KK,F4,CC3D,MWC 等,基本邏輯為飛行計劃設定,位置信息設定,姿態信息設定,電機驅動信號輸出四部分,其中位置與姿態信息數據來自傳感器系統的監測數據,通過各種融合算法進行位置與姿態信息的輸出。飛控系統中控制各種飛行模式的功能單元為狀態機,用來根據具體的飛控指令進行相應的模式切換。通用的飛控軟件架構邏輯框圖如圖5 所示。
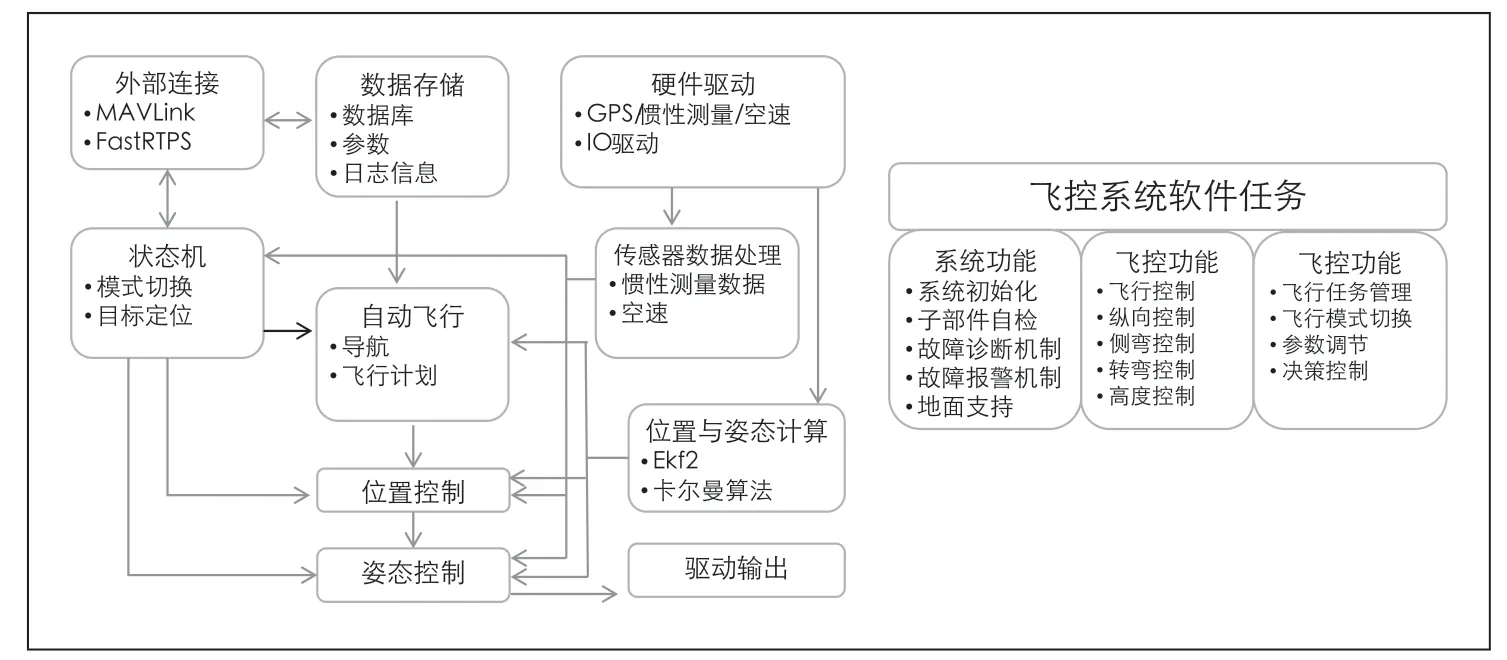
圖5 飛控系統軟件架構
以目前應用廣泛的PIXHAWK 開源飛控軟件為例,其核心操作系統為NuttX 實時ARM 系統,附帶了一系列工具集、系統驅動、主控與外圍軟件接口,這些功能單元最終隨操作系統一起,統一編譯成固件形式上傳至飛控主控板中,實現相應的功能。PIXHAWK 開源飛控軟件架構可以分為三部分:
(1)NuttX 實時操作系統
NuttX 是實時嵌入式系統(Embedded RTOS),采用模塊化設計,配置靈活,體積較小,PIXHAWK 開源飛控軟件采用NuttX 系統,提供POSIX-style 的用戶操作環境,例如printf(), open(),write(),poll(),ioctl()等操作,進行底層的任務調度。這也是PIXHAWK 飛控軟件開源后做的最大改動,采用NuttX 這個完全可擴展,實時,開放的系統符合POSIX 標準,達到簡化開發的目的。
(2)PIXHAWK 中間件
在NuttX 操作系統上面,運行著PIXHAWK 中間件,包含存儲、傳感器驅動、與內外部模塊間的通信,中間件提供了微對象請求代理uORB(Micro object request broker),其功能是為系統中運行的各單任務間提供異步通信。中間層還包括仿真功能,可使飛控軟件在桌面操作系統環境下,控制仿真環境中的無人機模型,實現對飛控程序正確性的驗證。
(3)PIXHAWK 飛行控制棧
飛行控制棧是無人機導航、制導與控制的集成,運行于PIXHAWK 中間件之上,包含的功能單元總結如下:
導航決策部分:根據無人機當前自身的安全狀態和接收到的指令,決定進入具體的工作模式,并計算出下一步行動。
位置姿態估計:根據飛控系統中的加速度計、陀螺儀、磁力計等傳感器得到自身的位置,此部分的核心算法較多,也是各飛控軟件性能區別的重要部分之一。
位置姿態控制部分:根據系統指令期望的位置和姿態設計的控制結構,盡可能又快又穩地達到期望的位置和姿態。
控制器輸出:依據姿態控制的指令經過混控器進行電機控制指令的輸出。
5 總結
本文提供了一種多旋翼無人機飛控系統架構設計方案,基于模塊化設計思路,從電路板結構緊湊設計,硬件電路冗余可靠性設計及高性能處理器、傳感器方案選型,軟件邏輯設計三方面進行了系統架構的設計闡述,提出了一種靈活配置的冗余設計的方案,解決了飛控系統對可靠性,安全性方面的需求,同時考慮了飛控系統成本,體積及性能平衡,整體架構設計擁有一定的技術先進性。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25