山地模塊化電動底盤的同側(cè)輸出行星減速器設(shè)計*
2023-09-11 09:31:20向浩高巧明韋增健許鵬曾俊豪趙鵬飛
中國農(nóng)機化學(xué)報 2023年8期
向浩,高巧明,2,3,韋增健,許鵬,曾俊豪,趙鵬飛
(1. 廣西科技大學(xué)機械與汽車工程學(xué)院,廣西柳州,545006; 2. 廣西汽車零部件與整車技術(shù)重點實驗室,廣西柳州,545006; 3. 廣西合浦縣惠來寶機械制造有限公司,廣西北海,536100)
0 引言
近年來“碳中和”概念持續(xù)走紅,各國都提出相關(guān)的舉措,其中研發(fā)新能源汽車成為主要措施之一,隨著投入的增加,電動汽車的發(fā)展取得重大進步,與電動汽車發(fā)展相比電動農(nóng)業(yè)底盤發(fā)展十分緩慢[1]。現(xiàn)有電動農(nóng)業(yè)底盤在丘陵山地適應(yīng)性較差,在農(nóng)用底盤上使用現(xiàn)有化工機械和礦山機械的行星減速器[2],存在著體積大,不易安裝等問題,使用機器人的行星減速器,存在著可靠性差、承載差等問題,均不適應(yīng)農(nóng)田的復(fù)雜工況作業(yè)。2017年美國約翰迪爾公布了全電動拖拉機SESAM,充滿電可持續(xù)工作4 h;同年,美國愛科旗下的Fendt推出了E100系列電動拖拉機,具有50 kW的功率輸出。2020年國家農(nóng)機裝備創(chuàng)新中心發(fā)布了具有輪邊驅(qū)動技術(shù)的ET1004-W電動拖拉機[3]。
目前,電動底盤的發(fā)展,大多數(shù)廠商只是在原有底盤的基礎(chǔ)上,將動力源發(fā)動機拆除,在發(fā)動機處安裝電動機作為動力源,繼續(xù)沿用原有的傳動系統(tǒng),不利于智能化升級[4-6]。
本文針對農(nóng)業(yè)動力底盤通過性差,農(nóng)業(yè)機械行星減速器發(fā)展緩慢、可靠性差等問題,采用模塊化設(shè)計理念,針對丘陵山地工況和地形地貌特點,設(shè)計獨立的三角橡膠履帶牽引模塊[7-8];再通過優(yōu)化設(shè)計理念,設(shè)計一款動力同側(cè)輸出且輸入軸與輸出法蘭同軸的二級行星減速器,解決農(nóng)機行星減速器可靠性差的問題。
1 山地模塊化電動底盤結(jié)構(gòu)
山地模塊化電動底盤采用模塊化設(shè)計理念,由功能模塊、牽引模塊、屬具模塊、屬具快換裝置等組成,并且底盤采用純電驅(qū)動模式,可以實現(xiàn)零排放和低噪作業(yè)。牽引模塊通過和不同的功能模塊組合可以實現(xiàn)載人和載物的切換,再通過安裝不同的屬具模塊,可以完成割草、開溝、施肥等工作。山地模塊化電動底盤主要參數(shù)如表1所示。
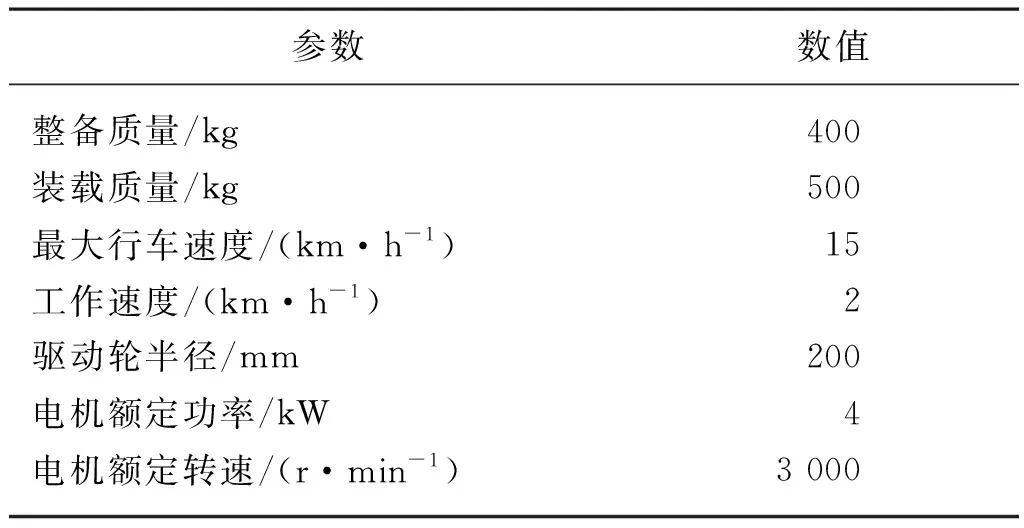
表1 山地模塊化電動底盤主要設(shè)計參數(shù)Tab. 1 Main design parameters of the mountain modular electric chassis
山地模塊化電動底盤的牽引模塊為獨立模塊,將軸向磁通電機和行星減速器集成在牽引模塊中,再通過集成的獨立懸架與功能模塊連接,實現(xiàn)了牽引模塊自有動力功能,通過電纜從功能模塊獲取能源從而驅(qū)動底盤行走,消除了功能模塊受動力源布置的設(shè)計限制,能實現(xiàn)更多的作業(yè)功能;實現(xiàn)了橫向地形的自適應(yīng)功能,兩端牽引模塊相對于功能模塊獨立的上下浮動,保障底盤在橫向工作時,人員的安全和屬具模塊的作業(yè)效果。
軸向磁通電機和行星減速器在牽引模塊中不同的布置方案對整個底盤的性能有著諸多的影響。如圖1(a)所示為牽引模塊的布置方案一,行星減速器一端安裝軸向磁通電機,另一端安裝履帶總成,此布置方式底盤整機寬度為1 200 mm,履帶中心距為950 mm,牽引模塊獨立懸架長度400 mm。如圖1(b)所示為牽引模塊的布置方案二;行星減速器安裝于履帶總成的外側(cè),電機安裝于履帶總成的內(nèi)側(cè),形成了行星減速器同側(cè)安裝軸向磁通電機和履帶總成的布置方式,此布置方式底盤整機寬度為1 000 mm,履帶中心距為750 mm,牽引模塊獨立懸架長度250 mm。
(a) 牽引模塊方案一
針對兩種布置方案使用運動學(xué)仿真軟件對牽引模塊和獨立懸架的運動進行分析,如圖2所示為牽引模塊履帶的橫向和縱向的位移變化曲線。方案一,由于電機和履帶的安裝,導(dǎo)致獨立懸架擺臂的長度相比于方案二更長。根據(jù)履帶橫向和縱向的位移變化量數(shù)據(jù)計算分析,在相同的縱向位移的情況下,方案二,履帶的橫向位移相比于方案一履帶的橫向位移平均降低了13.9%,使得履帶磨損降低,延長了履帶的使用壽命,并且方案二的行星減速器安裝于履帶總成的外側(cè),電機安裝于履帶總成的內(nèi)側(cè),使得底盤寬度較窄,通過性更好。
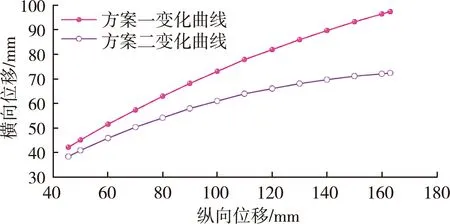
圖2 履帶位移變化曲線
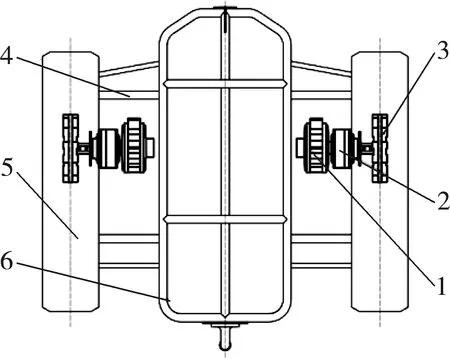
通過行星減速器同側(cè)安裝軸向磁通電機和履帶總成的布置方案進行分析,設(shè)計了一款動力同側(cè)輸入輸出的行星減速器。行星減速器的輸入軸和輸出法蘭位于同側(cè),因此該行星減速器安裝于兩端履帶的外側(cè)。履帶的牽引力由直接安裝在履帶總成上的兩個獨立軸向磁通電機提供,軸向磁通電機的輸出軸與行星減速器的輸入軸連接,行星減速器的輸出法蘭直接連接履帶的驅(qū)動輪帶動履帶行走。履帶驅(qū)動輪采用輪邊驅(qū)動、輪邊減速的方式以及兩側(cè)履帶獨立的電氣控制,滿足了高效率、低成本、體積小、控制方便、機動靈活的設(shè)計要求[9],如圖3所示。
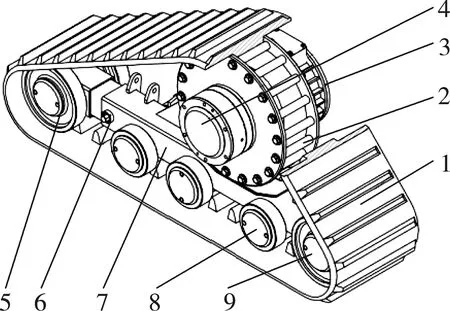
圖3 山地模塊化電動底盤牽引模塊
2 行星減速器結(jié)構(gòu)設(shè)計
2.1 行星減速器結(jié)構(gòu)設(shè)計
山地模塊化電動底盤主要應(yīng)用于丘陵山地,需要克服丘陵山地的復(fù)雜環(huán)境作業(yè),因此對牽引模塊的牽引力要求較高,從而要求行星減速器在低轉(zhuǎn)速時能夠提供高扭矩。根據(jù)山地模塊化電動底盤牽引模塊的電機、減速器、驅(qū)動輪的布置方案以及減速要求,設(shè)計了動力同側(cè)輸出且輸入軸與輸出法蘭同軸的二級行星減速器。行星減速器機構(gòu)簡圖如圖4所示,通過二級行星輪系減速,使用NGW型行星減速方式,滿足電驅(qū)動底盤的減速器的傳動要求;采用輸入軸與輸出法蘭重疊的方式以實現(xiàn)動力的同側(cè)輸入輸出;兩級行星輪系均采用4個行星輪的分布方式,增加傳動的平穩(wěn)性,從而具有體積小、承載能力大的優(yōu)勢[10]。
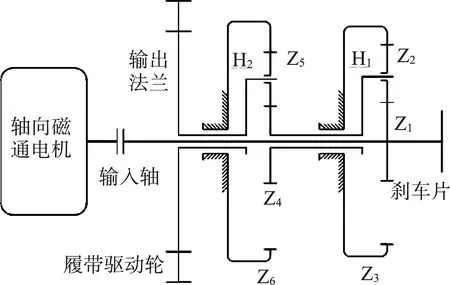
圖4 二級行星減速器機構(gòu)簡圖
2.2 行星減速器三維建模建立
行星減速器由箱體、箱蓋、行星輪系、輸入軸、輸出法蘭等組成,其中行星減速器箱體是整個行星減速器的基本骨架,是支撐行星輪系傳遞動力的重要承載體,根據(jù)箱體的設(shè)計要求及其原理進行設(shè)計,使其強度、剛度滿足要求。根據(jù)確定的減速器類型和機構(gòu)簡圖的運動關(guān)系,按照減速器相關(guān)原理的設(shè)計準則進行各零部件的設(shè)計,并建立行星減速器各零件三維模型,按照運動關(guān)系將各零件裝配,行星輪系結(jié)構(gòu)三維模型如圖5所示。
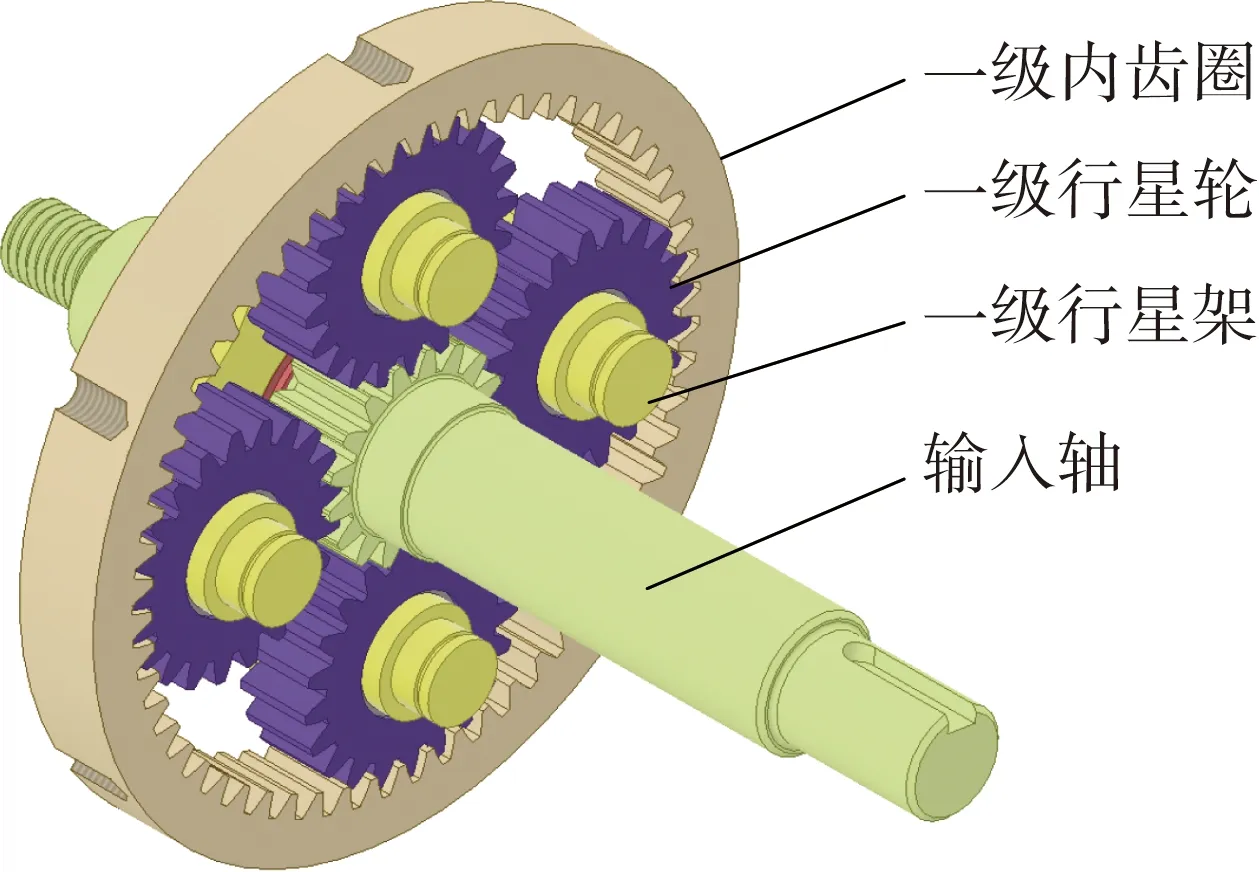
(a) 一級行星輪系結(jié)構(gòu)
3 行星減速器參數(shù)計算
3.1 行星減速器傳動比計算
山地模塊化電動底盤采用兩個軸向磁通電機作為動力源,單個軸向磁通電機的額定功率P=4 kW,額定轉(zhuǎn)速n0=3 000 r/min,山地模塊化電動底盤速度的設(shè)計要求為V=15 km/h,驅(qū)動輪的半徑rp=200 mm。按照設(shè)計要求的最大速度計算減速器的傳動比,如式(1)所示。
(1)
根據(jù)傳動比計算,取二級減速器的傳動比為i=15。
3.2 傳統(tǒng)設(shè)計方法確定齒輪參數(shù)
針對行星減速器首先采用傳統(tǒng)設(shè)計方法,以傳動比i=15為設(shè)計目標,以滿足同心要求和裝配條件為設(shè)計要求,經(jīng)過多次的修改得到滿足設(shè)計齒數(shù)參數(shù),如表2所示。傳統(tǒng)設(shè)計以靜態(tài)設(shè)計為主,設(shè)計目標、要求較為單一,不能滿足行星減速器的多目標設(shè)計需求,與現(xiàn)代設(shè)計方法相比具有較大的劣勢。
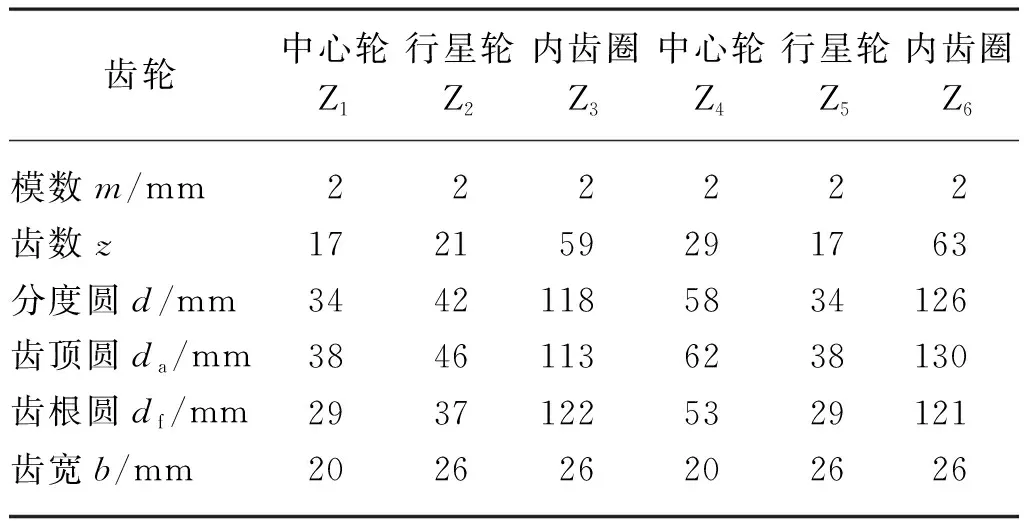
表2 傳統(tǒng)齒輪設(shè)計主要參數(shù)Tab. 2 Main parameters of traditional gear design
3.3 行星減速器齒輪參數(shù)優(yōu)化設(shè)計
山地模塊化電動底盤牽引模塊為獨立模塊且牽引模塊上安裝有行星減速器和軸向磁通電機,為滿足牽引模塊的安裝要求和性能要求,行星減速器的體積需要減小,但隨著體積的減小,其強度將會下降,為滿足體積要求和強度要求,運用可靠性理論及優(yōu)化設(shè)計技術(shù)[11],通過設(shè)計變量、建立目標函數(shù),再通過約束條件的限制,獲得最優(yōu)的齒輪齒數(shù)參數(shù)。使用優(yōu)化設(shè)計理念設(shè)計行星減速器,可以縮短設(shè)計周期,提高產(chǎn)品經(jīng)濟性[12]。
3.3.1 目標函數(shù)的建立
受到牽引模塊的限制,需要減小各部件的尺寸,從而達到減小行星減速器的尺寸的要求,在尺寸減小的同時需要保證減速器各部件的強度,使其能傳遞所需的扭矩。以行星減速器的體積作為設(shè)計準則,以齒輪體積之和最小為目標[13],優(yōu)化參數(shù)變量如式(2)所示。
X=[x1、x2、x3、x4、x5、x6]T
(2)
式中:x1、x2、x3、x4、x5、x6——齒輪Z1、Z2、Z3、Z4、Z5、Z6齒數(shù)。

(3)
式中:m——齒輪模數(shù);
b1、b2、b3、b4、b5、b6——各齒輪齒寬。
3.3.2 約束條件
按照可靠性理論與優(yōu)化設(shè)計要求設(shè)置約束條件,通過約束條件對目標函數(shù)進行限制,可以保證設(shè)計的行星減速器尺寸合理,工作穩(wěn)定可靠。
1) 同心條件。太陽輪與內(nèi)齒圈需要共軸且行星輪繞著此軸做回轉(zhuǎn)運動,所以需要行星輪的分度圓與太陽輪和內(nèi)齒圈的分度圓相切,故需滿足同心條件式(4)。
Za+2Zb=Zc
(4)
式中:Za——太陽輪齒數(shù);
Zb——行星輪齒數(shù);
Zc——內(nèi)齒圈齒數(shù)。
根據(jù)同心條件確定約束函數(shù)為
f1(x)=x1+2x2-x3=0
(5)
f2(x)=x4+2x5-x6=0
(6)
2) 裝配條件。行星輪系在裝配時,為保證Np個行星輪均勻分布在內(nèi)齒圈軸線為圓心的同一圓周上,且Np個行星輪均能與太陽輪和內(nèi)齒圈正確嚙合,需滿足裝配條件式(7),并根據(jù)裝配條件建立約束函數(shù)式(8)、式(9)。
(7)
(8)
(9)
式中:iaH——行星齒輪減速比;
i1H1——第一級行星齒輪減速比;
i4H2——第二級行星齒輪減速比;
n——任意正整數(shù);
Np——行星輪數(shù)。
在本設(shè)計中,需要行星減速器的體積較小且傳遞扭矩較大,為保證行星減速器的穩(wěn)定性和強度,因此選擇行星減速器行星輪數(shù)Np=4。
3) 鄰接條件。行星減速器的減速比大,結(jié)構(gòu)緊湊,為防止鄰接行星輪在運動中出現(xiàn)干涉,需要滿足鄰接條件式(10)。
L>dag
(10)
式中:L——相鄰兩個行星輪中心距;
dag——最大行星輪齒頂圓直徑。
根據(jù)鄰接條件建立約束函數(shù)式(11)、式(12)。
(11)
(12)
4) 不發(fā)生根切條件。齒輪使用范成法加工,當(dāng)齒數(shù)較小時,齒輪插刀會將齒輪根部過多切除從而產(chǎn)生根切現(xiàn)象,導(dǎo)致輪齒的抗彎強度下降,影響減速器工作的穩(wěn)定性,因此在齒輪參數(shù)設(shè)計時需要避免根切現(xiàn)象的產(chǎn)生,故需滿足不發(fā)生根切條件式(13),并根據(jù)不發(fā)生根切條件建立約束函數(shù)式(14)。
(13)
(14)
式中:α——齒輪壓力角。
在本文中,齒輪為漸開線圓柱齒輪,齒輪的壓力角α=20°。
5) 模數(shù)與齒寬的約束條件。在行星齒輪設(shè)計中,為提高傳動穩(wěn)定性,需滿足齒寬條件式(15)、式(16)。
5m≤bn≤17m
(15)
(16)
式中:bn——齒輪寬度;
dmin——最小齒輪分度圓。
相互嚙合的小齒輪與大齒輪承受的相同力矩,因此小齒輪齒面承受壓力更大,并且小齒輪齒面的嚙合次數(shù)較多,所以小齒輪的齒寬需要更寬,通常小齒輪的齒寬比大齒輪寬5~10 mm。本設(shè)計中選定太陽輪齒寬為20 mm,行星輪與內(nèi)齒圈齒寬為26 mm。
6) 傳動比條件。根據(jù)行星減速器傳動比計算所得的傳動比為15,為簡化計算,將行星減速器傳動比轉(zhuǎn)化為i=15±1,其傳動比條件為式(17),并建立約束函數(shù)式(18)、式(19)。
(17)
(18)
(19)
7) 齒輪強度條件。在行星減速器中,太陽輪同時與4個行星輪嚙合,嚙合次數(shù)最多且太陽輪體積較小受到的應(yīng)力較為集中,工作條件最為惡劣,受力最復(fù)雜,因此太陽輪最容易出現(xiàn)失效,所以分析兩級行星輪系太陽輪的齒根彎曲強度和齒面接觸疲勞強度即可。齒根彎曲強度可靠性根據(jù)式(20)計算。
(20)
式中:KF——彎曲疲勞強度載荷系數(shù);
Ta——主動輪轉(zhuǎn)矩;
YFa——齒型系數(shù);
YSa——應(yīng)力修正系數(shù);
Yε——重合度系數(shù);
φd—齒輪寬徑比;
σF——彎曲疲勞強度;
[σF]——彎曲疲勞許用應(yīng)力。
齒根彎曲強度可靠性計算式,確定其彎曲強度約束函數(shù)式(21)、式(22)。
f10(x)=2KFTaYFaYSaYε-[σF]φd1m3x12≤0
(21)
f11(x)=2KFTaYFaYSaYε-[σF]φd2m3x42≤0
(22)
根據(jù)機械設(shè)計手冊[15]以及直齒輪和斜齒輪承載能力計算標準[16]可得:KF=1.65、YFa=2.97、YSa=1.52、Yε=1.02、[σF]=505 MPa、KF=1.65、T1=95 N·m、T2=425 N·m。齒面接觸疲勞強度可靠性計算如式(23)所示,所建立的約束函數(shù)為式(24)、式(25)。
(23)
(24)
(25)
式中:KH——接觸疲勞強度載荷系數(shù);
ZH——區(qū)域系數(shù);
ZE——彈性影響系數(shù);
Zε——重合度系數(shù);
σH——接觸疲勞強度;
[σH]——接觸疲勞許用應(yīng)力;
u——齒數(shù)比。
根據(jù)機械設(shè)計手冊[15]以及直齒輪和斜齒輪承載能力計算標準[17]可得:KH=1.3、ZH=2.5、ZE=189.8 MPa1/2、Zε=0.876、σH=640 MPa。
3.3.3 數(shù)學(xué)模型的建立
根據(jù)優(yōu)化設(shè)計方法和機械設(shè)計理論,建立動力同側(cè)輸出的二級行星減速器齒輪計算數(shù)學(xué)模型。
(26)
本次優(yōu)化有1個目標函數(shù),6個設(shè)計變量為六種齒輪的齒數(shù),13個約束方程。
3.3.4 目標函數(shù)計算
已知P=4 kW,n輸入=3 000 r/min,i=15,NP=4,太陽輪材料為40Cr,行星輪和內(nèi)齒圈材料為20CrMnTi,根據(jù)最小體積目標函數(shù)以及約束條件進行計算,最終確定了減速器的相關(guān)參數(shù)。優(yōu)化后行星齒輪減速器主要參數(shù)如表3所示。
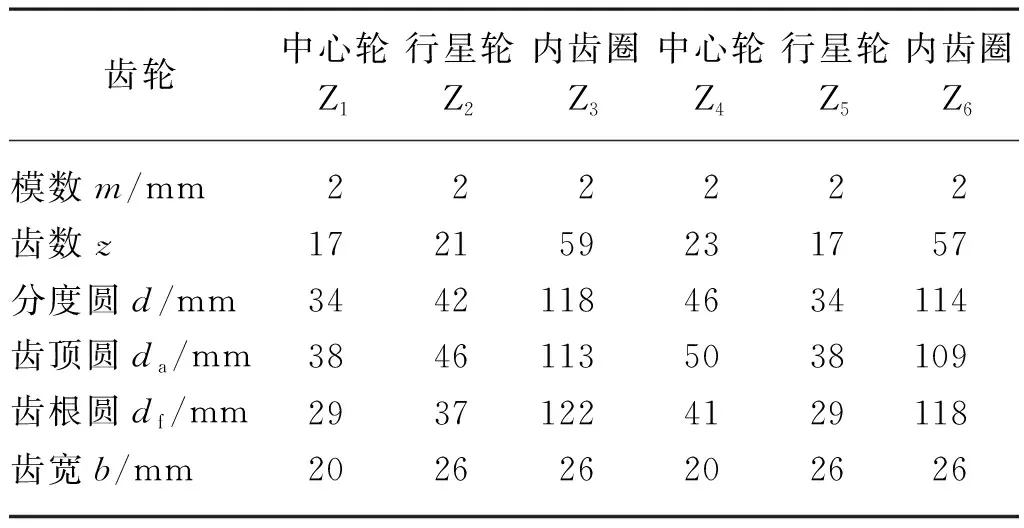
表3 行星齒輪減速器優(yōu)化后各齒輪參數(shù)Tab. 3 Planetary gear reducer after optimization of the gear parameters
3.4 優(yōu)化結(jié)果分析
通過對比傳統(tǒng)設(shè)計和優(yōu)化設(shè)計所得參數(shù)可以得到,優(yōu)化后的行星減速器中心輪Z1齒數(shù)為17,行星輪Z2齒數(shù)為21,內(nèi)齒圈Z3齒數(shù)為59,中心輪Z4齒數(shù)為23,行星輪Z5齒數(shù)為17,內(nèi)齒圈Z6齒數(shù)為57,其中中心輪Z4齒數(shù)以及內(nèi)齒圈Z6齒數(shù)降低,優(yōu)化前行星輪系總體積為219 128 mm2,優(yōu)化后行星輪系總體積為207 599 mm2,總體積相比之前降低5.3%。最大齒輪的原直徑為130 mm,優(yōu)化后直徑為122 mm,徑向尺寸相比之前降低6.2%。
4 傳動裝置分析
4.1 傳動裝置模態(tài)分析
行星齒輪減速器能夠傳遞大扭矩、高轉(zhuǎn)速的動力,這樣的動力將引起振動。振動將導(dǎo)致減速器的疲勞損壞,更有可能引發(fā)共振,導(dǎo)致整個行星減速器快速損壞,所以對其進行模態(tài)分析十分必要[18]。對傳動裝置采用自適應(yīng)的劃分方法,回轉(zhuǎn)體劃分為六面體網(wǎng)格,其他零件劃分為四面體網(wǎng)格。網(wǎng)格劃分后單元數(shù)量為20 573,單元節(jié)點數(shù)量為70 421,傳動裝置有限元模型如圖6所示。并對傳動裝置的材料進行參數(shù)設(shè)置,零件材料參數(shù)如表4所示。
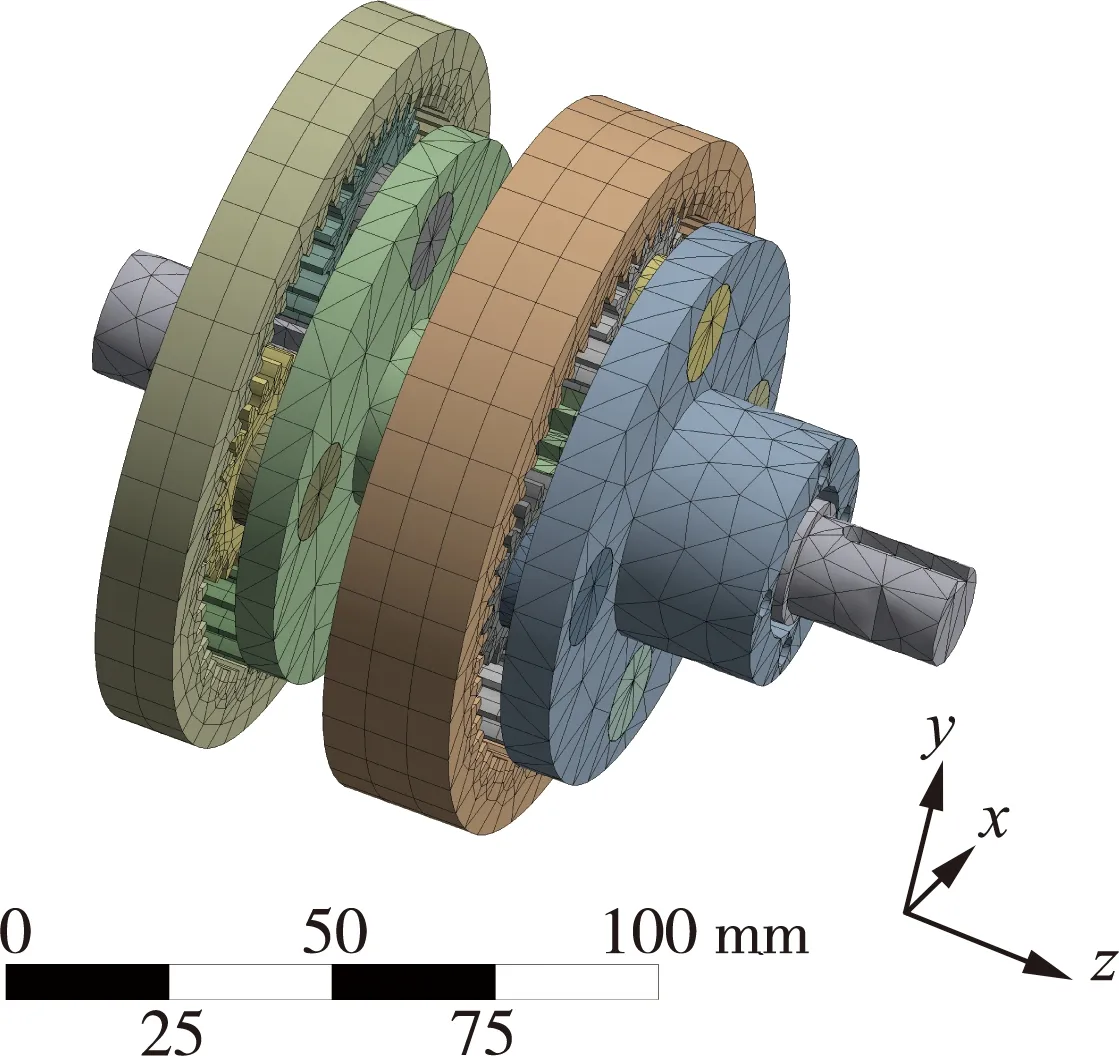
圖6 傳動裝置有限元模型
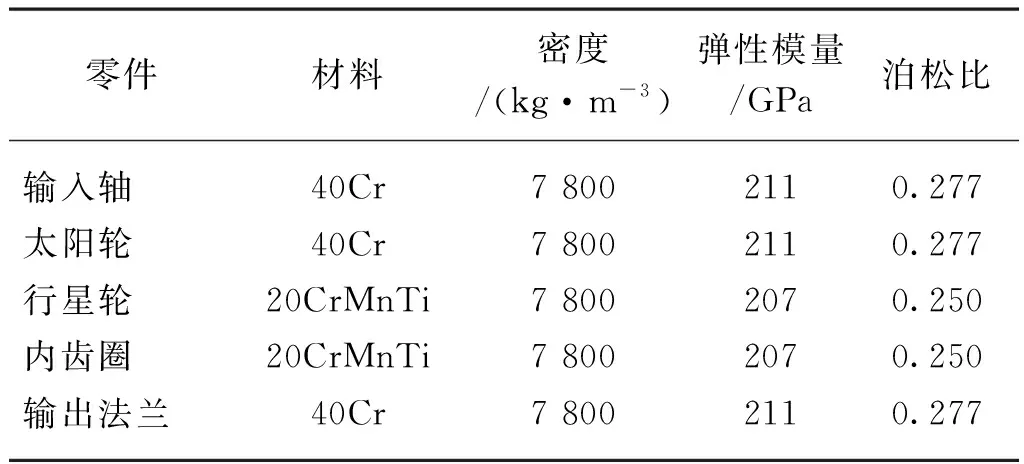
表4 主要零件材料參數(shù)Tab. 4 Main component material parameters
本文所研究的減速器工作頻率較低,因此對其模態(tài)分析時,無需關(guān)注過多階次的固有頻率。故分析傳動裝置的前5階固有頻率與振型,其振型圖如圖7所示。
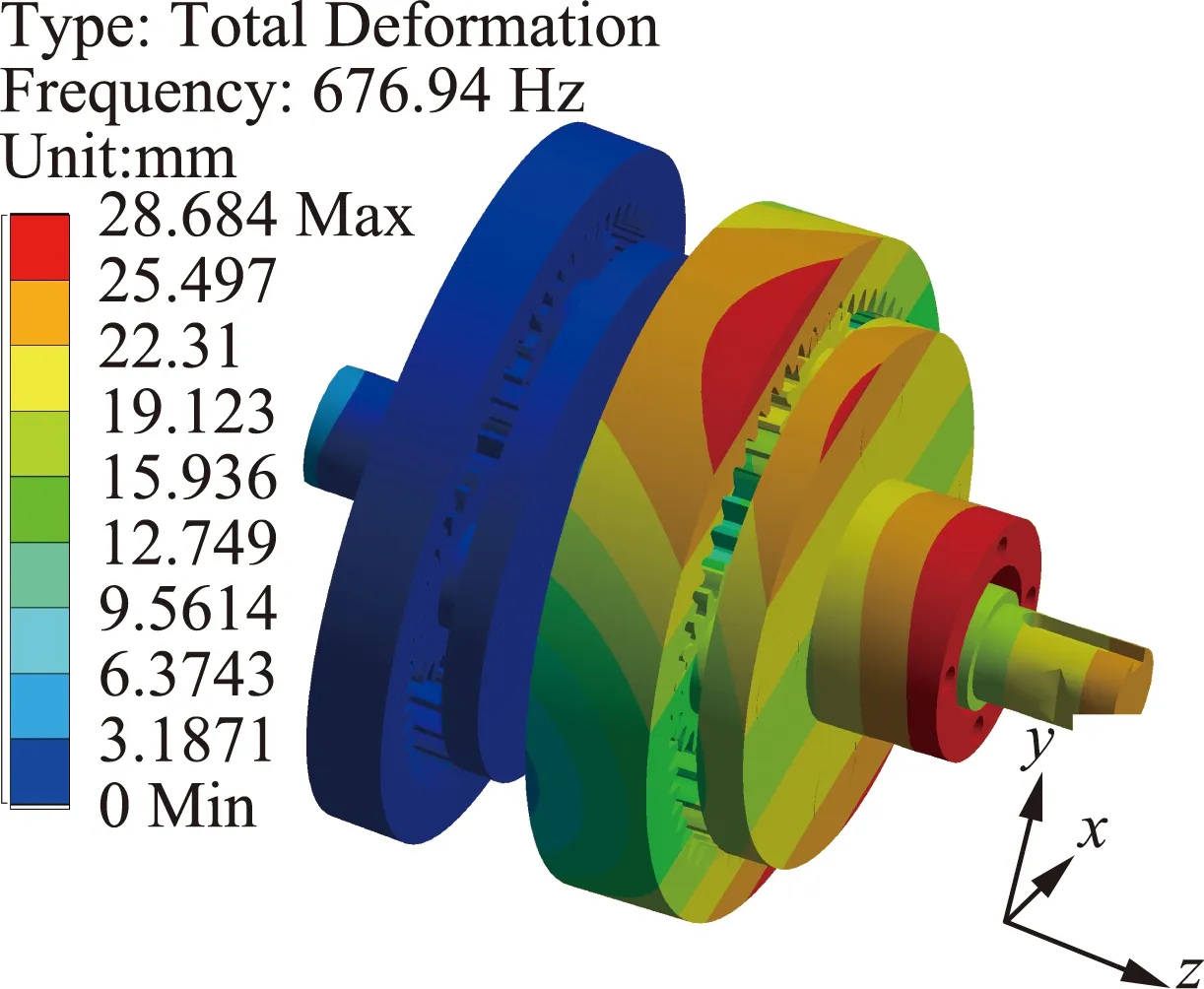
(a) 第1階
由圖7可知,1階、2階振動頻率為676.94 Hz、680.44 Hz,傳動裝置輸出軸分別繞X軸和Y軸擺動;3階振動頻率為901.71 Hz,行星架Z軸周向擺動;4、5階振動頻率為1 001.1 Hz、1 007.5 Hz,輸入軸發(fā)生明顯的彎曲變形,分別在X軸和Y軸發(fā)生彎曲變形。傳動裝置1階固有頻率為676.94 Hz遠大于減速器的振動頻率73.91 Hz,故減速器在工作過程中產(chǎn)生的振動不會引起傳動裝置的共振。
4.2 輸出法蘭靜力學(xué)分析
行星齒輪減速器主要作用是降低轉(zhuǎn)速和增大轉(zhuǎn)矩,所以輸出法蘭將承受非常大的扭矩[19-20]。對行星減速器中受力最大的輸出法蘭進行靜力學(xué)分析,可以保證行星減速器結(jié)構(gòu)的強度能夠達到要求且行星減速器安全可靠。為提高有限元分析的準確度,且結(jié)合輸出法蘭的形狀,采用六面體網(wǎng)格對輸出法蘭進行網(wǎng)格劃分,網(wǎng)格劃分后單元數(shù)量為12 459,單元節(jié)點數(shù)量為47 827,輸出法蘭有限元分析模型如圖8所示。
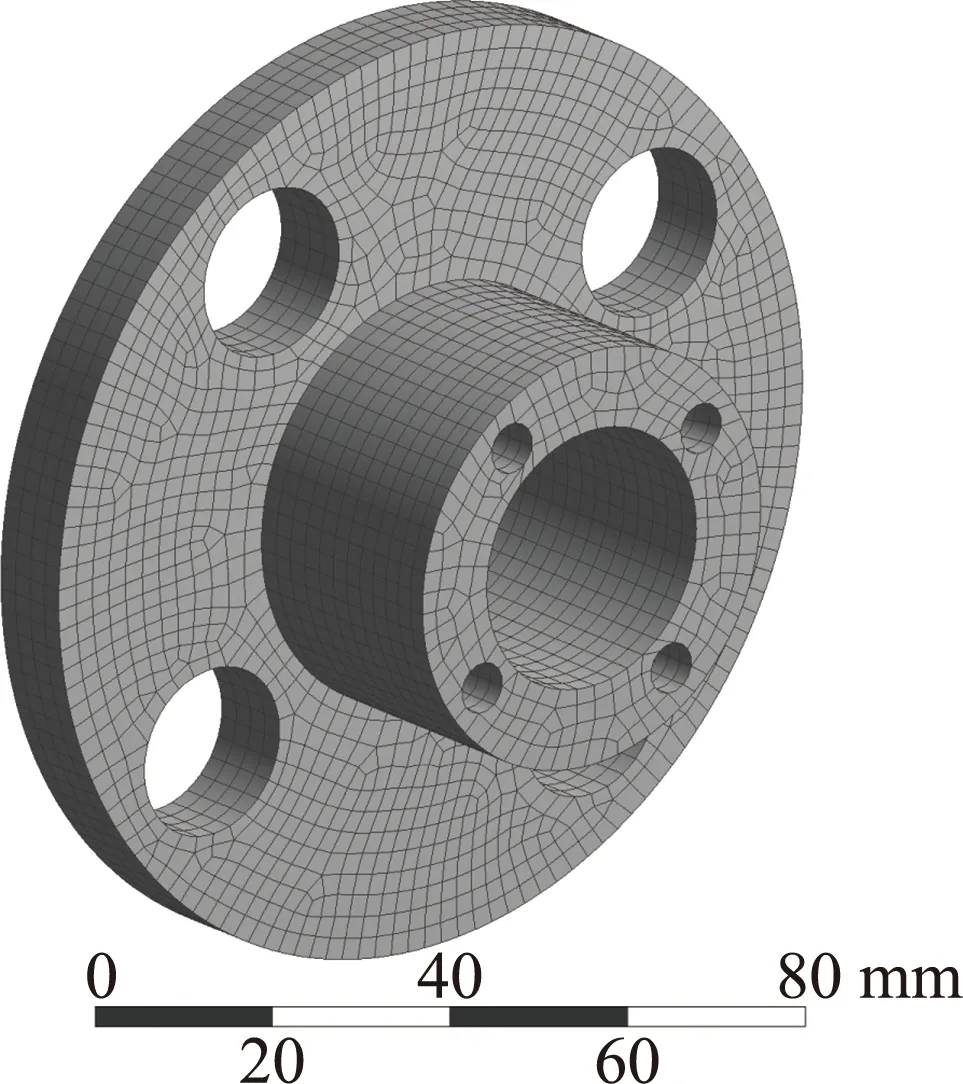
圖8 輸出法蘭有限元分析模型
山地模塊化電動底盤設(shè)計的工作速度為2 km/h,根據(jù)電機功率和減速器傳動比以及履帶驅(qū)動輪直徑進行換算,得到電機最大輸入轉(zhuǎn)矩為95 Nm,行星減速器的減速比為15,在法蘭盤外圓表面上施加1 425 Nm扭矩,再在安裝孔處施加固定約束。
通過Ansys分析求解,如圖9所示為輸出法蘭位移云圖,最大位移為0.077 794 mm,主要分布在行星架接觸孔處及附近,最大變形量較小,能夠滿足設(shè)計的要求。如圖10所示為輸出法蘭應(yīng)力云圖,輸出法蘭安裝孔處和行星架與輸出法蘭的連接部位處存在應(yīng)力集中,應(yīng)力最大值為240.72 MPa,小于40Cr的屈服極限785 MPa,因此輸出軸的強度合格,安全可靠。
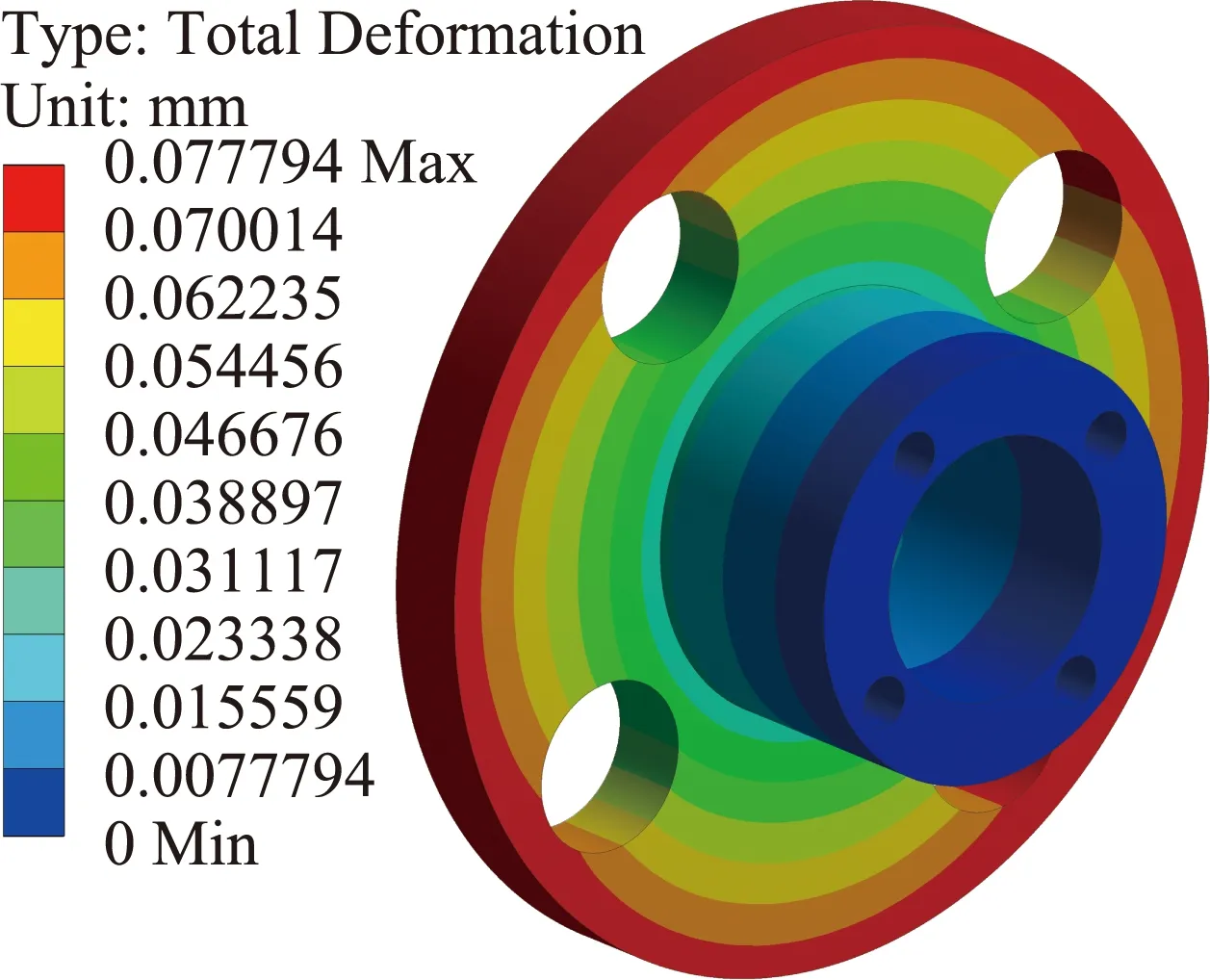
圖9 輸出法蘭位移云圖
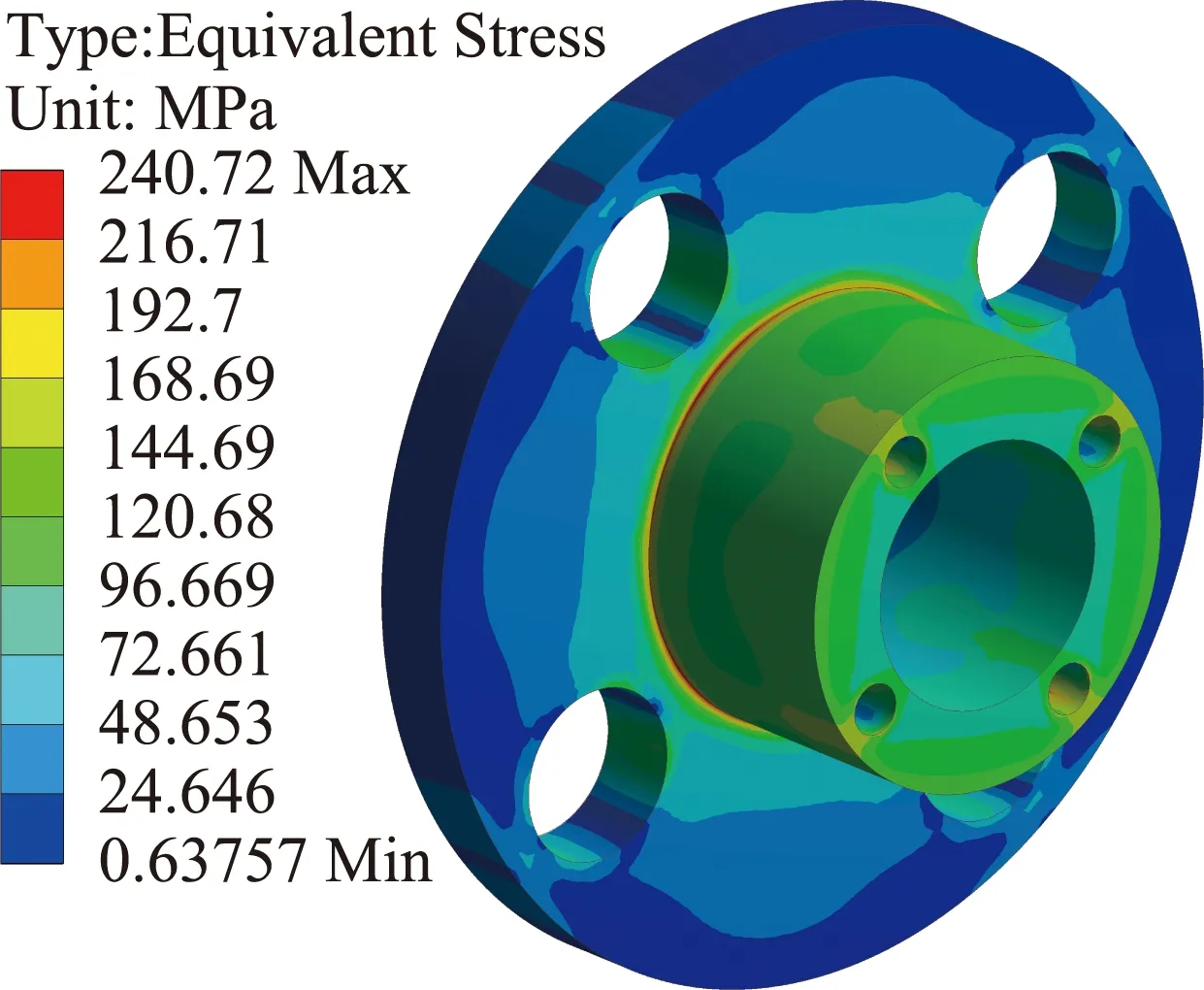
圖10 輸出法蘭應(yīng)力云圖
5 結(jié)論
1) 本文設(shè)計的同側(cè)輸出行星減速器能夠?qū)崿F(xiàn)動力同側(cè)輸出且輸入軸與輸出法蘭同軸,能滿足山地模塊化電動底盤的布置方案,從而使得電動底盤的寬度得到減少,通過性能更佳,并且通過運動學(xué)仿真可知牽引模塊的橫向位移平均減少13.9%,使得履帶的壽命得到延長,并且同側(cè)輸出行星減速器能夠低轉(zhuǎn)速高扭矩的輸出,提高山地模塊化電動底盤的通過性和穩(wěn)定性。
2) 相比于傳統(tǒng)的行星齒輪設(shè)計方法,采用可靠性設(shè)計理論,以輕量化為設(shè)計目標,搭建優(yōu)化分析模型,最終使得設(shè)計的行星減速器行星輪系總體積降低5.3%,徑向尺寸降低6.2%,降低總體積和徑向尺寸可以節(jié)省材料使得安裝空間更小。
3) 使用Ansys軟件針對傳動裝置進行模態(tài)分析,得到傳動裝置1階固有頻率為676.94 Hz遠大于減速器的振動頻率73.91 Hz,故減速器在工作過程中產(chǎn)生的振動不會引起傳動裝置的共振,對行星減速器關(guān)鍵零件輸出法蘭靜力學(xué)分析得到應(yīng)力最大值為240.72 MPa,小于其材料的屈服極限785 MPa,零件的強度滿足要求。
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
中國核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50