警用無人機(jī)集群指揮網(wǎng)絡(luò)的構(gòu)建與應(yīng)用
2023-09-11 06:17:40曹志波
中國人民警察大學(xué)學(xué)報 2023年8期
曹志波
中國人民警察大學(xué)(廣州) 基礎(chǔ)部,廣東 廣州 510663
0 引言
近年來,隨著無人機(jī)在反恐偵查[1-2]、搜尋救援[3]、巡邏監(jiān)控[4]、防爆搜捕等工作中的深度應(yīng)用,其已經(jīng)成為公安機(jī)關(guān)警務(wù)工作中保障人民安全、維護(hù)社會安定的重要工具,熟練操控?zé)o人機(jī)也成為警務(wù)人員提升警務(wù)效能的一項重要技能。當(dāng)前,公安機(jī)關(guān)警務(wù)工作中對無人機(jī)的應(yīng)用大多限于單兵作戰(zhàn),即一個具有飛行資格的警員同一時間只能操控一架無人機(jī),因此,當(dāng)需要多架無人機(jī)執(zhí)行某個任務(wù)時,就需要相應(yīng)數(shù)量的警員進(jìn)行操控。而目前對于通過多架無人機(jī)協(xié)同作戰(zhàn)完成公安機(jī)關(guān)警務(wù)工作的應(yīng)用研究相對較少。
警用無人機(jī)集群技術(shù)是一項多無人機(jī)協(xié)同技術(shù),可將多架無人機(jī)自身擁有的硬件和軟件資源,以及采集和處理的信息進(jìn)行有效融合。相比單架警用無人機(jī),警用無人機(jī)集群在突發(fā)警務(wù)事件(如反恐偵查、搜尋救援和防爆搜捕等)和日常警務(wù)事件(如巡邏監(jiān)控等)處置中,都具有更高的警務(wù)效能:(1)可以作為通信中繼為無電信網(wǎng)絡(luò)覆蓋的監(jiān)控地區(qū)提供通信服務(wù)。單架警用無人機(jī)的通信范圍一般受到電信網(wǎng)絡(luò)的限制,在沒有電信網(wǎng)絡(luò)覆蓋的地區(qū)便無法對目標(biāo)進(jìn)行監(jiān)控和視頻傳輸。而警用無人機(jī)集群則可以依據(jù)監(jiān)控距離搭建無人機(jī)通信中繼,從而完成遠(yuǎn)距離的目標(biāo)監(jiān)控和視頻傳輸。(2)在大型安保活動中可以提供范圍更廣的監(jiān)控視角。在大型活動和集會場合,需要大范圍和全方位的監(jiān)控視角來防止不法之徒的破壞,保障活動和集會的順利進(jìn)行。(3)可以對隱匿的犯罪分子和犯罪窩點進(jìn)行快速偵查。因此,借助無人機(jī)集群技術(shù),一線警務(wù)人員可以利用有限的警力操控多架無人機(jī)來完成諸如偵查搜捕、巡邏監(jiān)控等警務(wù)工作,從而提升警務(wù)效能。
1 警用無人機(jī)集群網(wǎng)絡(luò)的支撐技術(shù)
1.1 無人機(jī)集群組網(wǎng)技術(shù)
組網(wǎng)的目的在于通過電磁波更高效地傳輸數(shù)據(jù)信息[5]。根據(jù)傳輸介質(zhì)的不同可將組網(wǎng)技術(shù)分為有線組網(wǎng)技術(shù)和無線組網(wǎng)技術(shù),無人機(jī)集群采用的組網(wǎng)技術(shù)屬于無線組網(wǎng)技術(shù)。日常生活中使用的WiFi和4G/5G 均屬于無線組網(wǎng)技術(shù)范疇[6],在WiFi 和4G/5G 網(wǎng)絡(luò)中明確劃分了通信服務(wù)的生產(chǎn)者(路由器和基站)和消費者(手機(jī)和電腦)。從通信服務(wù)提供的角度來看,WiFi和4G/5G 的組網(wǎng)屬于星狀拓?fù)浣Y(jié)構(gòu),其不適用于無人機(jī)集群的組網(wǎng)[7],因為在無人機(jī)集群中無人機(jī)都是對等的,不存在絕對的通信服務(wù)生產(chǎn)者和消費者。同時,由于無人機(jī)集群隨時可能因為某種原因添加或移除無人機(jī),這就使得集群不可能將所有的通信服務(wù)安裝在某一架無人機(jī)之上,否則會造成單點失效。為解決這一類特殊(不同于一般無線組網(wǎng)技術(shù))問題,IEEE 802 標(biāo)準(zhǔn)委員會下的IEEE 802.11無線局域網(wǎng)工作組提出了Ad-Hoc無線自組網(wǎng)技術(shù)。
本文構(gòu)建的警用無人機(jī)集群指揮網(wǎng)絡(luò)采用Ad-Hoc 自組網(wǎng)技術(shù),這是一種分布式網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)。在Ad-Hoc 網(wǎng)絡(luò)中無人機(jī)既可以作為數(shù)據(jù)通信的發(fā)送端和接收端,也可充當(dāng)發(fā)送端和接收端的通信樞紐。因此,集群中的無人機(jī)既是一臺用于數(shù)據(jù)存儲與處理的“微型計算機(jī)”,也是一臺能進(jìn)行網(wǎng)絡(luò)尋址的“無線路由器”。在Ad-Hoc網(wǎng)絡(luò)中,無人機(jī)對于利用它自身無線信號探測到的其他無人機(jī),可以通過直連的方式進(jìn)行通信;對于那些無線信號無法探測到的無人機(jī),則可以通過多跳的方式進(jìn)行通信,如圖1所示。因此,利用Ad-Hoc網(wǎng)絡(luò)技術(shù),無人機(jī)集群可以實現(xiàn)動態(tài)多變環(huán)境下的多跳數(shù)據(jù)通信。
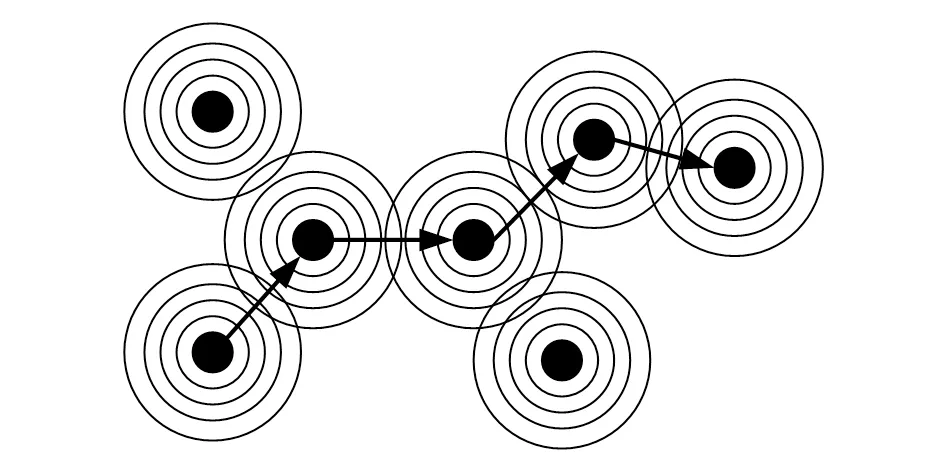
圖1 Ad-Hoc自組網(wǎng)多跳通信
1.2 無人機(jī)集群通信協(xié)議
無人機(jī)集群組網(wǎng)技術(shù)只涉及TCP/IP網(wǎng)絡(luò)協(xié)議的下兩層,即網(wǎng)絡(luò)接口層和網(wǎng)絡(luò)層。通過下兩層發(fā)送和接收的數(shù)據(jù)是一些很難被識別的二進(jìn)制數(shù)據(jù)流,無法回答諸如這些數(shù)據(jù)是從哪個字節(jié)開始、需要讀取的字節(jié)長度是多少、數(shù)據(jù)類型是什么(整型或浮點型)等問題。為回答這些問題,收發(fā)雙方需要提前對通信數(shù)據(jù)的格式進(jìn)行某種約定,約定數(shù)據(jù)的起始字節(jié)、讀取長度、數(shù)據(jù)類型等,然后發(fā)送方按照約定發(fā)送數(shù)據(jù),接收方按照約定解析數(shù)據(jù),最后接收方按照解析的數(shù)據(jù)內(nèi)容執(zhí)行相應(yīng)的操作,這種約定用專業(yè)術(shù)語講就是通信協(xié)議。無人機(jī)集群通信協(xié)議涉及的是TCP/IP 網(wǎng)絡(luò)協(xié)議的上兩層,即傳輸層和應(yīng)用層。本文無人機(jī)集群通信協(xié)議采用的是MAVLink[8]。MAVLink 是目前應(yīng)用最廣泛的中小型無人機(jī)(警用無人機(jī)通常使用的無人機(jī)類型)通信協(xié)議,版本號為2.3,屬于應(yīng)用層協(xié)議,其傳輸層采用的是UDP(User Datagram Protocol)協(xié)議。
圖2 為無人機(jī)集群中通信雙方約定的數(shù)據(jù)格式。各個字段的詳細(xì)說明可以參考MAVLink通信協(xié)議消息格式[9],下面對各個字段進(jìn)行簡要說明:(1)STX用于標(biāo)識數(shù)據(jù)包的起始位置,固定值為0xFD,占用一個字節(jié);(2)LEN 用于標(biāo)識數(shù)據(jù)包實際裝載(第七個字段PAYLOAD)的長度,單位為字節(jié),占用一個字節(jié);(3)SEQ 用于標(biāo)識當(dāng)前數(shù)據(jù)包的序列號、檢測數(shù)據(jù)包的可達(dá)性,占用一個字節(jié);(4)SYS 用于標(biāo)識數(shù)據(jù)包所屬無人機(jī)系統(tǒng)ID 號,區(qū)分無人機(jī)集群中不同的無人機(jī),占用一個字節(jié);(5)COMP 用于標(biāo)識數(shù)據(jù)包所屬無人機(jī)組件的ID 號,用于區(qū)分無人機(jī)內(nèi)部組件,占用一個字節(jié);(6)MSG 用于標(biāo)識數(shù)據(jù)包區(qū)分裝載(PAYLOAD)的消息類型,占用三個字節(jié);(7)PAYLOAD 用于標(biāo)識數(shù)據(jù)包裝載的具體消息內(nèi)容,占用0~255 個字節(jié)不等;(8)CKA 和CKB 字段裝載CRC-16 循環(huán)冗余校驗算法[10]的16 位校驗碼,用于保證數(shù)據(jù)的完整性;(9)INC、CMP和Signature字段用于防止數(shù)據(jù)包被篡改。

圖2 MAVLink通信協(xié)議數(shù)據(jù)格式
1.3 無人機(jī)集群操作系統(tǒng)
無人機(jī)集群操作系統(tǒng)是構(gòu)建在無人機(jī)集群通信協(xié)議之上的一種分布式操作系統(tǒng)[11],簡稱無人機(jī)集群系統(tǒng)。為實現(xiàn)對集群中無人機(jī)的控制,無人機(jī)集群系統(tǒng)需要借助MAVLink對集群中的無人機(jī)發(fā)布指令。無人機(jī)集群系統(tǒng)主要安裝在地面控制中心(例如地面站)和無人機(jī)集群兩個部分,安裝在控制中心的集群系統(tǒng)稱為主系統(tǒng),而安裝在無人機(jī)集群中的集群系統(tǒng)稱為守護(hù)系統(tǒng)。
無人機(jī)集群系統(tǒng)的構(gòu)建屬于多智能體系統(tǒng)[12]研究范疇。因此,可以將集群中無人機(jī)看作一個個智能體,這些智能體既要服從集群的整體決策,又要擁有一些自主的行為模式,比如集群系統(tǒng)會命令無人機(jī)從某個地理坐標(biāo)(經(jīng)度、緯度、視高)C飛到坐標(biāo)D,但并不一定會為該無人機(jī)規(guī)劃從C 到D 的具體路線。這就意味著無人機(jī)集群系統(tǒng)要明確自身的能力界限,什么事情該做,什么事情不該做。
無人機(jī)集群系統(tǒng)在整個指揮網(wǎng)絡(luò)中具有承上啟下的作用,對上承接各種任務(wù)的執(zhí)行,對下負(fù)責(zé)集群內(nèi)各種命令和數(shù)據(jù)的傳輸。基于任務(wù)的執(zhí)行流程,將無人機(jī)集群系統(tǒng)分為系統(tǒng)層和自組織層(不同于胡利平等[13]的分法),如圖3 所示(原子任務(wù)是原子類任務(wù)的簡稱,指不可再分的任務(wù))。另外,根據(jù)系統(tǒng)層所處位置,又將其分為主系統(tǒng)層和守護(hù)系統(tǒng)層,分別對應(yīng)無人機(jī)集群主系統(tǒng)和守護(hù)系統(tǒng)。
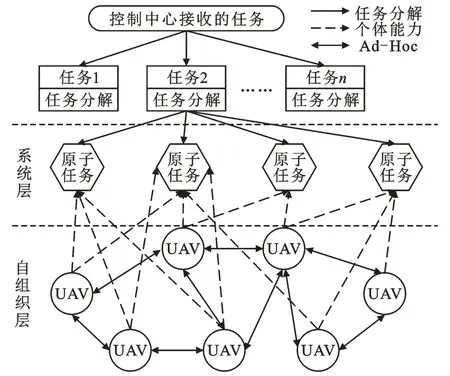
圖3 無人機(jī)集群系統(tǒng)體系結(jié)構(gòu)
自組織層通過Ad-Hoc 網(wǎng)絡(luò)構(gòu)建無人機(jī)之間的組織關(guān)系,根據(jù)系統(tǒng)層的要求完成對無人機(jī)集群的重構(gòu)。重構(gòu)是指在任務(wù)改變、遭受攻擊、環(huán)境變化等情況下,集群以最小的代價通過重建無人機(jī)間組織關(guān)系來避免這些沖突的過程。根據(jù)重構(gòu)的激發(fā)形式可分為主動重構(gòu)和受激重構(gòu),根據(jù)重構(gòu)的規(guī)模和范圍可分為局部重構(gòu)和整體重構(gòu)。自組織層的集群重構(gòu)機(jī)制如圖4所示。
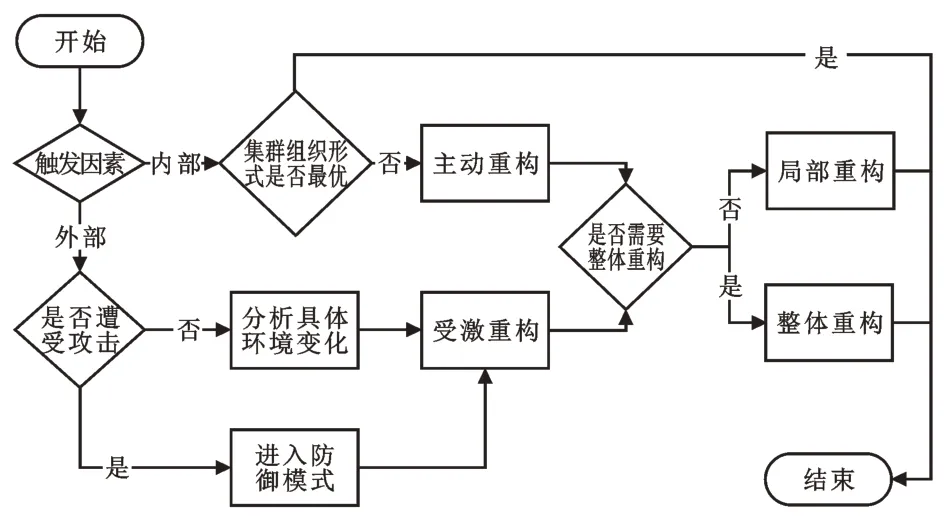
圖4 無人機(jī)集群系統(tǒng)自組織層重構(gòu)機(jī)制
當(dāng)無人機(jī)集群系統(tǒng)接收到一個需要執(zhí)行的全局任務(wù)(用于區(qū)分原子類任務(wù))時,具體的執(zhí)行流程如下:(1)首先主系統(tǒng)層獲取原子類任務(wù)。原子類任務(wù)的不可再分是相對的不是絕對的,依據(jù)不同的集群規(guī)模和集群中無人機(jī)的性能,原子類任務(wù)被劃分的數(shù)量和大小也不同,因此,原子類任務(wù)具有很強的集群依賴性。需要特別注意的是,一個原子類任務(wù)只能在一架無人機(jī)上執(zhí)行,而一架無人機(jī)可以執(zhí)行多個原子類任務(wù)。(2)主系統(tǒng)層將原子類任務(wù)分配給自組織層內(nèi)的無人機(jī),分配的前提要考慮無人機(jī)具有的個體能力,個體能力是指該無人機(jī)是否具有運行某個原子類任務(wù)的能力,比如計算資源、存儲資源、網(wǎng)絡(luò)資源以及電池電量等是否滿足該原子類任務(wù)執(zhí)行要求。(3)無人機(jī)之上的守護(hù)系統(tǒng)層會監(jiān)控原子類任務(wù)的執(zhí)行情況,將無人機(jī)上原子類任務(wù)執(zhí)行的狀態(tài)信息返回給主系統(tǒng)層。主系統(tǒng)層根據(jù)掌握的原子類任務(wù)狀態(tài)信息和當(dāng)前集群狀態(tài)信息來判斷當(dāng)前是否存在無法繼續(xù)執(zhí)行的原子類任務(wù),然后將這些信息轉(zhuǎn)化為自組織層重構(gòu)機(jī)制的觸發(fā)因素來完成對集群的重構(gòu)。當(dāng)所有原子類任務(wù)執(zhí)行完畢后,返回步驟(1)執(zhí)行下一個全局任務(wù)。
1.4 無人機(jī)集群任務(wù)分配
無人機(jī)集群任務(wù)分配是無人機(jī)集群系統(tǒng)的核心應(yīng)用程序,負(fù)責(zé)接收和劃分警務(wù)應(yīng)用平臺下達(dá)的全局任務(wù),同時根據(jù)無人機(jī)集群系統(tǒng)提供的集群信息將全局任務(wù)劃分為原子類任務(wù)。根據(jù)集群所處環(huán)境的變化情況可分為靜態(tài)任務(wù)分配和動態(tài)任務(wù)分配。
1.4.1 靜態(tài)任務(wù)分配
靜態(tài)任務(wù)分配應(yīng)用程序安裝在無人機(jī)集群主系統(tǒng)上,主要負(fù)責(zé)原子類任務(wù)的初始化分配。原子類任務(wù)初始化分配本質(zhì)上是一種多目標(biāo)優(yōu)化的問題[14],即如何將原子類任務(wù)分配到多個無人機(jī)上。將多目標(biāo)優(yōu)化算法應(yīng)用到無人機(jī)集群靜態(tài)任務(wù)分配中就是:假設(shè)待分配的原子類任務(wù)有n個,集群中的無人機(jī)有m架,根據(jù)集合論[15]中冪集的求解公式,可知原子類任務(wù)到無人機(jī)的映射關(guān)系共有mn種可能,之后利用多目標(biāo)優(yōu)化算法在這mn種可能中求出集群靜態(tài)任務(wù)分配的最優(yōu)方案。
1.4.2 動態(tài)任務(wù)分配
動態(tài)任務(wù)分配應(yīng)用程序安裝在無人機(jī)集群守護(hù)系統(tǒng)上。一般情況下,當(dāng)集群主系統(tǒng)通過靜態(tài)任務(wù)分配算法完成原子類任務(wù)的初始化分配后,原子類任務(wù)會在被分配的無人機(jī)上執(zhí)行,直到執(zhí)行完畢并將結(jié)果返回給主系統(tǒng)為止。但是,如果無人機(jī)集群受到攻擊或者因為環(huán)境變化導(dǎo)致執(zhí)行能力下降,守護(hù)系統(tǒng)就會進(jìn)行集群重構(gòu)。重構(gòu)可能導(dǎo)致一些或者全部的原子類任務(wù)在當(dāng)前無人機(jī)上執(zhí)行效率下降的問題,因此,就需要動態(tài)任務(wù)分配算法將這些原子類任務(wù)進(jìn)行再分配以提高執(zhí)行效率。
目前,針對這種問題的解決方法主要是合同網(wǎng)算法[16],合同網(wǎng)算法是多智能體系統(tǒng)的核心算法之一。合同網(wǎng)算法有兩個主要角色,即管理者和工作者,同時還有一個重要的數(shù)據(jù)結(jié)構(gòu)任務(wù)通知書,任務(wù)通知書負(fù)責(zé)管理者和工作者之間原子類任務(wù)信息的傳輸。集群中的無人機(jī)既可以是管理者,也可以是工作者。無人機(jī)集群發(fā)生重構(gòu)后,擁有原子類任務(wù)的無人機(jī)守護(hù)系統(tǒng)會判斷該原子類任務(wù)是否適合在當(dāng)前無人機(jī)上運行。如果不適合,該無人機(jī)(管理者)就會利用任務(wù)通知書封裝該任務(wù)的基本信息,通過MAVLink 將任務(wù)通知書廣播給周圍的無人機(jī)(工作者)。各個工作者根據(jù)自身資源信息和任務(wù)通知書中原子類任務(wù)的信息,計算出執(zhí)行該任務(wù)需要消耗的資源和時間,然后將計算結(jié)果通過MAVLink 返回給管理者。管理者從所有計算結(jié)果中選出最優(yōu)結(jié)果,即資源消耗和時間消耗綜合最少的工作者,并將原子類任務(wù)下發(fā)給該工作者。如果合適,則不進(jìn)行任何操作。
2 警用無人機(jī)集群指揮網(wǎng)絡(luò)構(gòu)建
警用無人機(jī)集群指揮網(wǎng)絡(luò)(以下簡稱“指揮網(wǎng)絡(luò)”)的硬件資源主要包括控制中心和無人機(jī)集群。指揮網(wǎng)絡(luò)主要分為三層:網(wǎng)絡(luò)層、系統(tǒng)層和應(yīng)用層,如圖5 所示。網(wǎng)絡(luò)層負(fù)責(zé)控制中心和無人機(jī)集群間的網(wǎng)絡(luò)組建和通信,主要包括Ad-Hoc自組網(wǎng)技術(shù)和MAVLink 通信協(xié)議;系統(tǒng)層主要負(fù)責(zé)警務(wù)應(yīng)用下發(fā)的全局任務(wù)的劃分與分配,同時負(fù)責(zé)原子類任務(wù)的數(shù)據(jù)處理,在控制中心端包括無人機(jī)集群主系統(tǒng)和靜態(tài)任務(wù)分配模塊,在無人機(jī)集群端包括無人機(jī)集群守護(hù)系統(tǒng)和動態(tài)任務(wù)分配模塊;應(yīng)用層主要負(fù)責(zé)將相關(guān)警務(wù)應(yīng)用生成全局任務(wù),只有控制中心包含應(yīng)用層,且包含一個警務(wù)應(yīng)用模塊。
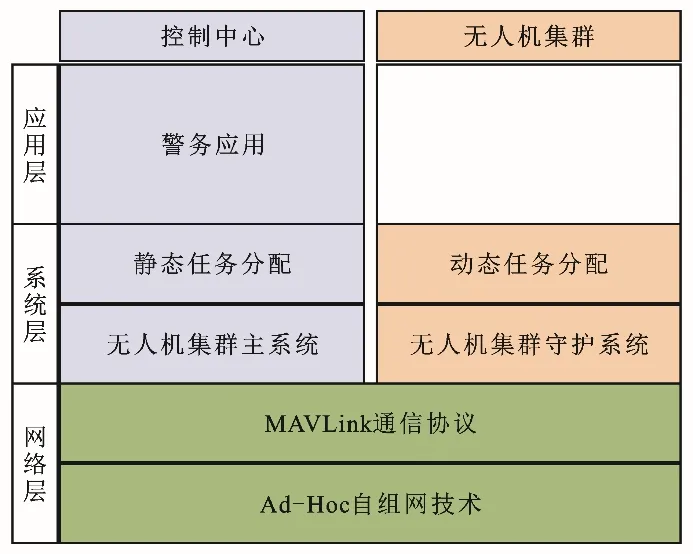
圖5 警用無人機(jī)集群指揮網(wǎng)絡(luò)
2.1 網(wǎng)絡(luò)層
指揮網(wǎng)絡(luò)的網(wǎng)絡(luò)層對應(yīng)的是TCP/IP協(xié)議的五層網(wǎng)絡(luò)協(xié)議。網(wǎng)絡(luò)層的底層采用了去中心化的Ad-Hoc 自組網(wǎng)技術(shù),對應(yīng)TCP/IP 的下兩層,即網(wǎng)絡(luò)接口層和網(wǎng)絡(luò)層。相較于采用星狀拓?fù)浣M網(wǎng)結(jié)構(gòu)的WiFi和4G/5G,Ad-Hoc采用了分布式拓?fù)浣M網(wǎng)結(jié)構(gòu),這使Ad-Hoc 可以很好地適應(yīng)無人機(jī)集群的動態(tài)變化,不會因為集群中無人機(jī)的失效或者加入而導(dǎo)致集群通信癱瘓。網(wǎng)絡(luò)層的上層采用MAVLink 通信協(xié)議,對應(yīng)TCP/IP 的上兩層即傳輸層和應(yīng)用層,MAVLink 是廣泛應(yīng)用于警用無人機(jī)的通信協(xié)議,具有良好的兼容性和擴(kuò)展性。
2.2 系統(tǒng)層
控制中心的靜態(tài)任務(wù)分配模塊通過無人機(jī)集群主系統(tǒng)獲取各無人機(jī)集群守護(hù)系統(tǒng)上的無人機(jī)狀態(tài)信息,依據(jù)這些狀態(tài)信息將應(yīng)用層傳遞的全局任務(wù)劃分為合適的原子類任務(wù)。然后依據(jù)多目標(biāo)優(yōu)化算法獲取原子類任務(wù)到無人機(jī)集群的最優(yōu)匹配方案,主系統(tǒng)依據(jù)該匹配方案將原子類任務(wù)通過MAVLink傳輸給相應(yīng)的無人機(jī)。無人機(jī)獲取原子類任務(wù)后便開始執(zhí)行,執(zhí)行過程中如果遇到無人機(jī)集群重構(gòu),則借助守護(hù)系統(tǒng)上的動態(tài)任務(wù)分配模塊對原子類任務(wù)進(jìn)行動態(tài)重分配,以達(dá)到最優(yōu)執(zhí)行效率。
2.3 應(yīng)用層
控制中心的警務(wù)應(yīng)用模塊可以在一線公安的警務(wù)綜合平臺(簡稱“警綜平臺”)上實現(xiàn),警綜平臺通過VPN(Virtual Private Network)與控制中心進(jìn)行通信,以保證數(shù)據(jù)傳輸?shù)陌踩浴R痪€警務(wù)工作者借助警務(wù)應(yīng)用模塊設(shè)置或者描述將要執(zhí)行的任務(wù),然后警務(wù)應(yīng)用模塊通過這些設(shè)置或者描述信息生成全局任務(wù),最后將全局任務(wù)提交給集群主系統(tǒng)即可。
3 警用無人機(jī)集群指揮網(wǎng)絡(luò)應(yīng)用
在反恐偵查、搜尋救援、巡邏監(jiān)控、防爆搜捕等工作中,警務(wù)人員首先需要確定警務(wù)工作的目標(biāo)(簡稱“警務(wù)目標(biāo)”),如偵查目標(biāo)、救援目標(biāo)以及監(jiān)控搜捕目標(biāo)等,然后通過對警務(wù)目標(biāo)的搜索和監(jiān)控快速警力部署。相較于單架警用無人機(jī)的搜索與監(jiān)控能力,指揮網(wǎng)絡(luò)可以在更大的地理范圍內(nèi)進(jìn)行目標(biāo)搜索和監(jiān)控,可以根據(jù)搜索范圍動態(tài)調(diào)整無人機(jī)集群的規(guī)模。因此,在將指揮網(wǎng)絡(luò)應(yīng)用到具體的公安機(jī)關(guān)警務(wù)工作時,首要問題是如何利用無人機(jī)集群來完成警務(wù)目標(biāo)的搜索與監(jiān)控,即警務(wù)目標(biāo)搜索與追蹤及警務(wù)目標(biāo)的視頻回傳。
3.1 警務(wù)目標(biāo)搜索與追蹤
3.1.1 警務(wù)目標(biāo)搜索
通過指揮網(wǎng)絡(luò)進(jìn)行警務(wù)目標(biāo)搜索的具體流程如圖6 所示。(1)警務(wù)人員根據(jù)指揮中心的命令,在警綜平臺上選取要進(jìn)行目標(biāo)搜索的區(qū)域以及相應(yīng)的警務(wù)目標(biāo)(包含目標(biāo)的一些特征信息,如人像信息、車輛和物品特征信息等),然后點擊目標(biāo)搜索。(2)控制中心將警務(wù)人員選定的區(qū)域和目標(biāo)信息傳入警務(wù)應(yīng)用模塊,警務(wù)應(yīng)用模塊依據(jù)這些信息生成一個全局任務(wù)。集群主系統(tǒng)對該全局任務(wù)進(jìn)行任務(wù)分割,同時通過MAVLink獲取集群當(dāng)前可用于目標(biāo)搜索的無人機(jī)數(shù)目n,最后分割出n個區(qū)域原子類任務(wù),每個區(qū)域原子類任務(wù)都會描述要搜索的子區(qū)域范圍和起始坐標(biāo)信息。(3)無人機(jī)集群主系統(tǒng)的靜態(tài)任務(wù)分配模塊利用n個區(qū)域原子類任務(wù)、n架無人機(jī)的狀態(tài)信息以及多目標(biāo)優(yōu)化算法,完成原子類任務(wù)到無人機(jī)的最優(yōu)匹配。集群主系統(tǒng)對區(qū)域原子類任務(wù)進(jìn)行打包,即封裝成多個MAVLink數(shù)據(jù)包,然后按照匹配結(jié)果將這些區(qū)域原子類任務(wù)分配給相應(yīng)的目標(biāo)無人機(jī)。(4)無人機(jī)集群守護(hù)系統(tǒng)利用MAVLink對獲取的區(qū)域原子類任務(wù)進(jìn)行解包,并獲取其中的待搜索區(qū)域信息和起始坐標(biāo)信息。然后依據(jù)這些信息開始區(qū)域搜索,如果某架無人機(jī)搜索到目標(biāo),相應(yīng)的集群守護(hù)系統(tǒng)會返回目標(biāo)的坐標(biāo)信息,如果沒有搜索到,集群守護(hù)系統(tǒng)會返回一個空的警務(wù)目標(biāo)坐標(biāo)。(5)控制中心獲取警務(wù)目標(biāo)的搜索結(jié)果,然后將結(jié)果展示給警務(wù)人員,警務(wù)人員將結(jié)果反饋給指揮中心,并完成搜索。
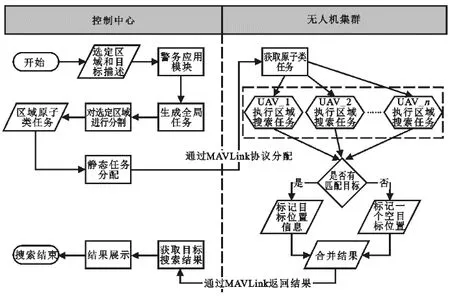
圖6 警務(wù)目標(biāo)搜索流程圖
3.1.2 警務(wù)目標(biāo)追蹤
一般情況下,警務(wù)目標(biāo)是不斷移動的,因此在完成警務(wù)目標(biāo)搜索后,還需要對其進(jìn)行追蹤。通過指揮網(wǎng)絡(luò)進(jìn)行警務(wù)目標(biāo)追蹤的具體流程如圖7 所示。(1)警務(wù)人員首先通過警務(wù)目標(biāo)搜索獲取目標(biāo)的坐標(biāo)信息,坐標(biāo)信息在警綜平臺上顯示,然后警務(wù)人員選中警務(wù)目標(biāo)點擊追蹤。(2)控制中心的警務(wù)應(yīng)用模塊根據(jù)警務(wù)目標(biāo)坐標(biāo)信息生成目標(biāo)“坐標(biāo)獲取任務(wù)”,并通過MAVLink傳輸“坐標(biāo)獲取任務(wù)”數(shù)據(jù)包到無人機(jī)集群上,無人機(jī)集群獲取該數(shù)據(jù)包后,會再次探測目標(biāo)的坐標(biāo)信息(其中探測到警務(wù)目標(biāo)坐標(biāo)的無人機(jī)稱為目標(biāo)無人機(jī),目標(biāo)無人機(jī)的身份并非固定不變,而是隨著集群重構(gòu)在集群內(nèi)部不斷變化),并將探測到的警務(wù)目標(biāo)坐標(biāo)信息傳輸給控制中心。(3)控制中心根據(jù)傳回的目標(biāo)數(shù)據(jù)信息判斷警務(wù)目標(biāo)的坐標(biāo)是否需要更新。如果否,則將坐標(biāo)信息傳輸給步驟(2)執(zhí)行,如果是,則更新警務(wù)目標(biāo)坐標(biāo)信息,并判斷是否需要優(yōu)化通信網(wǎng)絡(luò)(警務(wù)目標(biāo)的移動可能導(dǎo)致當(dāng)前Ad-Hoc 自組網(wǎng)對該目標(biāo)的通信信號變?nèi)酰H绻麩o需優(yōu)化,則將坐標(biāo)信息傳輸給步驟(2)執(zhí)行,如果需要優(yōu)化,則執(zhí)行下一步驟。(4)無人機(jī)集群主系統(tǒng)在接收通信優(yōu)化指令后,自身的應(yīng)激重構(gòu)機(jī)制被觸發(fā),并生成無人機(jī)集群系統(tǒng)重構(gòu)任務(wù)。然后,通過MAVLink 協(xié)議將重構(gòu)任務(wù)信息傳輸給無人機(jī)集群守護(hù)系統(tǒng),無人機(jī)集群根據(jù)重構(gòu)任務(wù)信息進(jìn)行重構(gòu)并達(dá)到優(yōu)化通信網(wǎng)絡(luò)的目的,完成后通知集群主系統(tǒng),之后重復(fù)步驟(2)。
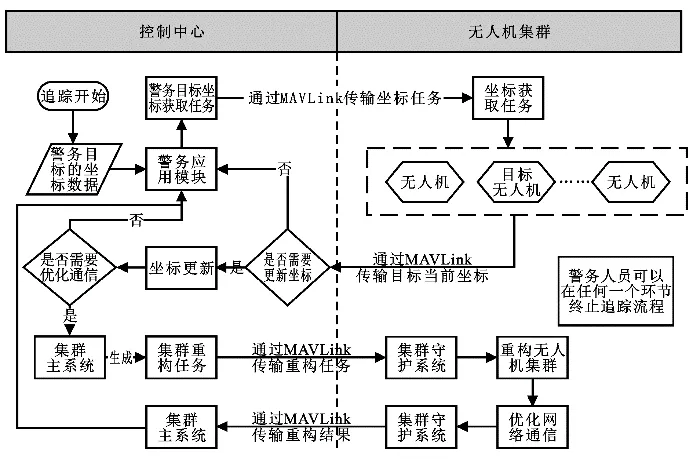
圖7 警務(wù)目標(biāo)追蹤流程圖
3.2 警務(wù)目標(biāo)的視頻回傳
對于大多數(shù)需借助無人機(jī)執(zhí)行的警務(wù)工作,僅通過警務(wù)目標(biāo)搜索和追蹤獲取的信息可能不足以作出決策和部署,如果能實時獲取現(xiàn)場的視頻信息,那將對指揮中心作出快速決策和準(zhǔn)確部署提供有力支撐。視頻信息的獲取需要借助MAVLink對集群中目標(biāo)無人機(jī)的云臺控制來完成,即MAVLink 云臺協(xié)議[9]。
云臺協(xié)議允許控制中心調(diào)整無人機(jī)的攝像機(jī)或者其他掛載傳感器的姿態(tài)或方向。基于該協(xié)議,飛手可以通過手柄調(diào)整攝像機(jī)或傳感器的方向,也可以通過控制中心下達(dá)任務(wù)的方式進(jìn)行調(diào)整。云臺包括云臺管理器和云臺設(shè)備兩個部分。云臺設(shè)備的姿態(tài)調(diào)整:首先控制中心發(fā)送MSG=282 的MAVLink 數(shù)據(jù)包到云臺管理器,同時將需要調(diào)整的云臺姿態(tài)數(shù)據(jù)(滾轉(zhuǎn)角、偏航角、俯仰角以及目標(biāo)云臺設(shè)備信息等)寫進(jìn)該數(shù)據(jù)包的PAYLOAD中;接收該數(shù)據(jù)包后,云臺管理器依照該數(shù)據(jù)包內(nèi)的云臺設(shè)備信息向相應(yīng)的云臺設(shè)備發(fā)送MSG=284 的數(shù)據(jù)包,并將姿態(tài)數(shù)據(jù)寫進(jìn)該數(shù)據(jù)包;最后云臺設(shè)備依照數(shù)據(jù)包內(nèi)的姿態(tài)數(shù)據(jù)進(jìn)行姿態(tài)調(diào)整,并將調(diào)整后的結(jié)果返回云臺管理器和控制中心。結(jié)合MAVLink 的攝像機(jī)協(xié)議[9],將攝像機(jī)掛載在無人機(jī)的云臺上,即可通過云臺協(xié)議調(diào)整攝像機(jī)的角度完成視頻信息的回傳。通過攝像機(jī)協(xié)議進(jìn)行視頻回傳的過程為:首先控制中心發(fā)送MSG=73 的命令類數(shù)據(jù)包到目標(biāo)攝像機(jī),且請求命令為MAV_CMD_REQUEST_MESSAGE(Param1=269,Param2=0),Param1=269 表示請求的是視頻流信息,Param2=0 表示任何類型的視頻流都可以。攝像機(jī)收到該數(shù)據(jù)包后,返回MSG=269 的視頻流數(shù)據(jù)包給控制中心。
通過指揮網(wǎng)絡(luò)進(jìn)行警務(wù)目標(biāo)視頻回傳的具體流程如圖8 所示。(1)控制中心的警務(wù)人員選中警綜平臺上的警務(wù)目標(biāo),然后點擊視頻回傳。(2)警務(wù)目標(biāo)的坐標(biāo)數(shù)據(jù)會分別傳給警務(wù)應(yīng)用模塊和警務(wù)目標(biāo)追蹤子流程。(3)警務(wù)應(yīng)用模塊生成一個視頻回傳任務(wù),并通過MAVLink 攝像機(jī)協(xié)議向目標(biāo)無人機(jī)發(fā)出視頻請求,然后目標(biāo)無人機(jī)通過MAVLink 協(xié)議實時返回攝像機(jī)拍攝的視頻信息。(4)無人機(jī)集群主系統(tǒng)對警務(wù)目標(biāo)追蹤子流程產(chǎn)生的實時坐標(biāo)信息和步驟(3)返回的視頻信息進(jìn)行判斷,判斷視頻信息是否完整描述了當(dāng)前的目標(biāo)信息,即是否需要調(diào)整攝像機(jī)的角度。如果是,則執(zhí)行步驟(5);如果否,則執(zhí)行步驟(6)。(5)控制中心生成目標(biāo)無人機(jī)云臺調(diào)整任務(wù),然后通過MAVLink云臺協(xié)議向目標(biāo)無人機(jī)發(fā)出調(diào)整攝像機(jī)角度的命令,目標(biāo)無人機(jī)收到命令后,按照要求調(diào)整云臺角度,通過MAVLink 云臺協(xié)議返回調(diào)整結(jié)果,無人機(jī)集群主系統(tǒng)收到調(diào)整結(jié)果后提取目標(biāo)無人機(jī)的坐標(biāo)位置,然后傳入警務(wù)目標(biāo)追蹤子流程,繼續(xù)步驟(4)。(6)無人機(jī)集群主系統(tǒng)提取目標(biāo)無人機(jī)的坐標(biāo)位置,傳入警務(wù)目標(biāo)追蹤子流程,繼續(xù)步驟(4)。
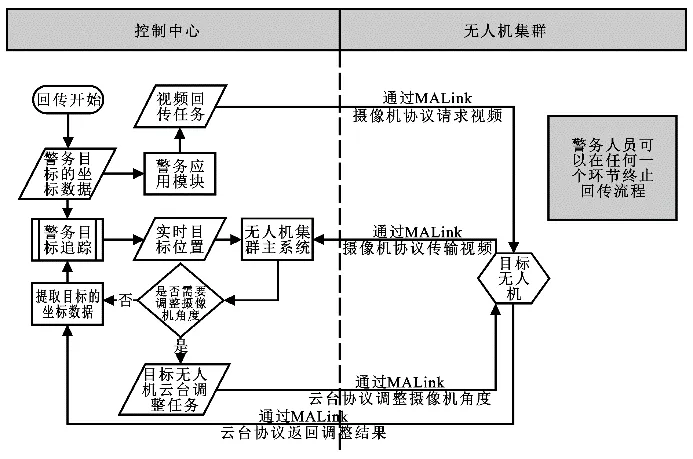
圖8 警務(wù)目標(biāo)視頻回傳流程圖
4 結(jié)束語
本文首先分析了警用無人機(jī)集群在偵查搜捕、巡邏監(jiān)控等基層公安機(jī)關(guān)警務(wù)工作應(yīng)用中的優(yōu)勢,然后詳細(xì)介紹了構(gòu)建警用無人機(jī)集群指揮網(wǎng)絡(luò)所需要的關(guān)鍵支撐技術(shù),即無人機(jī)集群自組網(wǎng)技術(shù)Ad-Hoc、無人機(jī)集群通信協(xié)議MAVLink、無人機(jī)集群操作系統(tǒng)和任務(wù)分配算法。在此基礎(chǔ)上,提出了警用無人機(jī)集群指揮網(wǎng)絡(luò)的三層架構(gòu):網(wǎng)絡(luò)層、系統(tǒng)層和應(yīng)用層。最后,針對實際工作中警務(wù)應(yīng)用的特點,通過指揮網(wǎng)絡(luò)構(gòu)建了警務(wù)目標(biāo)搜索、追蹤、視頻回傳的應(yīng)用流程。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32