多徑效應下變分貝葉斯壓縮感知無源定位方法
2023-09-13 03:06:38李華靜盛金鋒
計算機工程與設計 2023年8期
李華靜,李 寧,郭 艷,盛金鋒,陳 承
(中國人民解放軍陸軍工程大學 通信工程學院,江蘇 南京 210007)
0 引 言
隨著智能時代的到來,用戶對位置信息的需求日益增長。目前,已有多種成熟的目標定位系統被廣泛應用于國防事業、電力調度、救災減災、應急搜救等眾多領域[1,2],如北斗定位系統(BeiDou navigation satellite system,BDS)以及基于移動蜂窩網的定位系統。這些定位系統能夠滿足用戶在眾多應用場景下的定位需求,同時也為目標定位技術的進一步發展奠定了必要基礎。當待定位目標自身無法搭載衛星無線地面接收定位裝置或者在其自身希望不被衛星監測定位或追蹤定位的特殊情景中,傳統的衛星定位技術和衛星有源定位技術[3,4]等方法都不再適用。面對這種復雜情景,學者們給出了一種不需要依賴目標發射無線信息的無源被動定位方法[5,6](device-free localization,DFL)。
現有的無源被動定位技術利用較多的信息有兩種:其一是接收信號強度[7](received signal strength,RSS),其二是信道狀態信息[8](channel state information,CSI)。然而大多無線傳感器設備都不能直接利用具有細粒度的CSI,在此情況下,與CSI相比無線傳感器本身具有的信息RSS則顯得極易獲取并且后續加工處理也相對簡便。因此,基于RSS的無源被動定位技術是解決DFL問題的首選方案。
根據對無線信號處理方式的不同,現有的基于RSS的無源被動定位技術主要可分為如下4類:①基于幾何法的無源被動定位技術[9];②基于指紋法的無源被動定位技術[10];③基于無線層析成像[11](radio to-mographic imaging,RTI)的無源被動定位技術;④基于壓縮感知[12](compressive sensing,CS)的無源被動定位技術。其中幾何法定位精度較低,指紋法耗時長,無線層析成像法對硬件要求高。而壓縮感知技術的出現為實現多目標無源被動定位提供了新的思路。壓縮感知技術通過對信號稀疏性的有效利用,能夠在低維空間的非相關觀測中,實現對高維信號的感知。在多目標無源被動定位中目標位置向量是稀疏的,因此通過非相關觀測只需采集少量的測量信息,就能以極高的概率重構目標位置向量。
近年來,許多研究者對由信號中的室內多徑反射引起的問題進行了大量的研究。大多數現有的DFL系統僅單純聚焦于信號的RSS測量值。但即使在靜態環境中,由于多徑衰落和噪聲的影響[13,14],RSS的定位精度也很容易受到時間和空間變化的影響,故單純聚焦信號的RSS測量值并不能保證定位精度。本文提出了一種基于多徑反射的變分貝葉斯壓縮感知無源定位方法,在壓縮感知理論體系中構建虛擬節點模型,利用多徑效應下虛擬傳感器的接收信號強度,在不額外增加硬件資源的情況下增加通信鏈路,并利用改進橢圓權重模型以量化目標陰影效應,通過處理后的通信鏈路接收信號強度估計目標位置,有效提高了定位精度。該方法克服了傳統基于接收信號強度的壓縮感知定位方法對環境敏感,以及在復雜變化環境下定位精度下降的問題,并且在同等傳感器數量的條件下,達到更高的定位精度;另一方面,有效節約了資源,將通信鏈路接收到并處理后的RSS值作為觀測數據,減輕了環境噪聲的影響,同時進行網格裁剪,降低了運算復雜度,減少了計算時間。
1 系統模型
1.1 基本定位場景模型
傳統無源定位場景設置如圖1所示。待定位的無源定位目標隨機分布在矩形定位區域內,矩形定位區域的四周部署著收發定位信息的傳感器節點,通過測量傳感器節點收發定位信息構成的通信鏈路,實現對無源定位目標的定位。

圖1 傳統無源定位場景
1.2 利用反射信號設計的定位場景
本文構建的無源定位場景如圖2所示。為簡便起見,假設定位區域仍為實線矩形區域D,待定位的無源目標隨機分布在矩形定位區域內,為更好地覆蓋定位區域,智能反射面分別部署在定位區域東、南、西、北的邊界外,構成比定位區域更大的矩形區域S。在D與S之間的位置部署傳感器節點,通過利用智能反射面,將來自各個傳感器節點的反射信號匯集為虛擬傳感器,虛擬傳感器與真實傳感器的排列方式為交替排列。

圖2 無源定位場景
事實上在一般定位場景中,除了視距(line of sight,LOS)路徑外,通信鏈路中有大量多徑分量的信號傳播量尚未計算出,它們以反射、衍射和折射的形式存在。而反射信號作為第二強傳播信號,在以往壓縮感知的建模和計算中沒有考慮。因此,本文利用智能反射面反射出的定位信號,設計出虛擬傳感器節點模型,如圖3所示。通過虛擬傳感器節點模型,將大量多徑分量的反射信號建模為從反射面后的一個鏡像傳感器發出的信號,讓實體傳感器與虛擬傳感器都置于智能反射面所構成的矩形內部。真實傳感器與虛擬傳感器交替排列的部署方式,具體可表示為

圖3 虛擬傳感器模型
rv(rx)=[ra(rx)-sk]Pk
(1)
其中,Pk為對稱正交矩陣,可表示為Pk=E-2Wn(kx)Wn(kx)T,sk表示偏移量,可表示為sk=2rv(rx)-kx。 而Wn(kx),k=1,2,3,4表示為反射面RIS的法向量,反射面可由齊次坐標 (Ax,Bx) 表示,則法向量可表示為
Wn(kx)=(A2x+B2x)- 12(Ax,Bx)T
(2)
根據反向光線跟蹤算法[15]的解,若原始的鏈路總數為L,通過虛擬傳感器模型,將得到L+V鏈路,其中V是從反向光線跟蹤獲得的虛擬傳感器中獲得的鏈路。由此可知,在未增加硬件耗材的情況下,使通信鏈路得到增加。
1.3 通信鏈路的空間影響區域
在設計的包含智能反射面所構成的矩形定位區域內隨機分布有K個待定位目標,為估計其位置,需在包含智能反射面所構成的矩形定位區域四周部署能夠采集相關RSS信息的傳感器節點,并且為增加通信鏈路,要在兩個真實傳感器間部署一個虛擬傳感器,具體部署結構的方式如圖2所示。本文將由智能反射面反射出的信號構建為從智能反射面后的一個鏡像傳感器發出的信號,當若干個鏡像傳感器發出的信號匯集在兩個真實傳感器之間的位置時,就令其為虛擬傳感器節點。真實傳感器與虛擬傳感器的接收信號強度信息均作用于通信鏈路中,同時利用這些定位信息計算接收信號強度的差值。為更好地覆蓋定位區域,假設這些均勻部署在定位區域的邊界上的真實傳感器和虛擬傳感器數量為2M,每兩個傳感器(一發一收)組成一條通信鏈路,則共有M條通信鏈路。將M條通信鏈路的初始接收信號強度值(不存在待定位目標即無遮擋時的信號強度值定為初始值)存儲在向量中y0, 則接收信號強度的差值y可計算為
y=yk-y0
(3)
其中,yk為M條通信鏈路存在待定位目標(存在遮擋)時的接收信號強度值。
由于壓縮感知理論針對的是離散信號,為了將壓縮感知中的稀疏恢復算法用到無源定位中,需對定位區域進行網格化處理。將定位區域劃分為N個大小相同的網格,并按順序編號,即1,2,3,…,n,…,N。 用一個N維向量θN×1表示K個待定位目標 (K?N) 的位置分布:若某個網格含有目標,則將該網格中心點在直角坐標系中的坐標位置視為目標位置,并在θN×1向量中對應位置的值置為1,其余無目標的位置則置為0。簡便起見,規定每個網格內至多含有一個目標,具體的通信鏈路空間影響區域如圖4所示。

圖4 通信鏈路空間影響區域
只有在空間影響區域內的目標才會影響該通信鏈路的接收信號強度信息,根據改進的橢圓權重模型,目標陰影效應所導致的信號強度的變化量可計算為
φl,i=Al·(1-cl(0.5At)2X2i+cl·(1-Y2iB2t))s.t.X2i(0.5At)2+Y2iB2t≤1
(4)
其中,φl,i表示位于第i個網格的目標對鏈路l的陰影效應所導致的信號偏移量,(Xi,Yi) 為第i個網格在X-Y坐標系中的坐標,Bt為鏈路l的長度,At為鏈路l第一菲涅爾帶的最大半徑,Al為鏈路l信號偏移量的最大值,cl為鏈路l中點的歸一化信號偏移。從而可構建無源字典Φ
(5)
信號強度差值向量y可表示為
y=Φθ+ε
(6)
其中,ε為噪聲向量,θ為N維向量。
2 基于RSSI的壓縮感知定位算法
2.1 兩層先驗模型
為誘導目標位置向量θ的稀疏性,將引入了一個兩層高斯先驗模型。在先驗模型的第一層,θ被定義為隱藏變量,服從高斯分布。在變分貝葉斯推理框架下,定義θ的高斯先驗分布為
P(θ|α)=∏Nn=1N(θ|α,α-1n)=(2π)- N2|Λ|12·exp(- 12θTΛθ)
(7)
其中,αn為θn的逆方差,α=[α1,α2,…,αn,…αN]T,Λ=diag(α)。
將αn視為隱藏變量,假定α的先驗分布為Gamma分布
p(α;c,d)=∏Nn=1Gamma(αn|c,dn)
(8)
其中,c和d={d1,d2,…,dn,…,dN} 是Gamma分布的確定性參數。
ε是零均值噪聲向量,假設其逆方差為β, 則似然函數可表示為
p(y|θ,β)=(2πβ-1)- M2·exp(-β2y-Φθ22)
(9)
同理,將β也視為一個隱藏變量,假設其遵循一個帶有確定性參數a和b的Gamma先驗分布
p(β;a,b)=Gamma(β|a,b)
(10)
2.2 基于變分貝葉斯推理的稀疏重構
在分層先驗模型中,y為觀測數據即所求得的接收信號強度差值,z={θ,α,β} 為隱藏變量,可以利用變分貝葉斯推理得到z的后驗分布。此外,Ω={a,b,c,d} 為先驗模型中的確定性參數,通常被賦給非常小的值,此處為a=b=c=d=10-6, 為z提供非信息先驗。z的對數后驗近似為
lnq(θ)=〈lnp(y,z;Ω)〉q(α)q(β)+const
(11)
lnq(α)=〈lnp(y,z;Ω)〉q(θ)q(β)+const
(12)
lnq(β)=〈lnp(y,z;Ω)〉q(θ)q(α)+const
(13)
其中,q(θ)、q(α)、q(β) 分別為θ、α、β的后驗分布,const表示常量,〈·〉 表示求期望,p(y,z;Ω) 表示隱藏變量z和觀測數據y的聯合分布。根據概率鏈式法則,p(y,z;Ω) 可分解為
p(y;z;Ω)=p(y|θ,β)p(θ|α)p(β;a,b)p(α;c,d)
(14)
根據α,β的分布,可得到θ的后驗分布為
q(θ)=N(θ|μ,∑)
(15)
其中,μ為均值向量,∑為協方差矩陣
μ=〈β〉∑ΦTy
(16)
∑=(〈β〉ΦTΦ+〈Λ〉)-1
(17)
根據θ的分布,可得到α的后驗分布為
q(α)=∏Nn=1Gamma(αn|,n)
(18)
=c+12
(19)
n=dn+12(μn)2+12∑n,n
(20)
根據θ的分布,可得到β的后驗分布為
q(β)=Gamma(β|,b~)
(21)
=a+M2
(22)
b~=b+12(tr(Φ∑ΦT)+y-Φμ22)
(23)
更新α,β的期望值為
〈αn〉=d~n
(24)
〈β〉=b~
(25)
2.3 網格修剪機制
從2.2節的公式推導中,可知當隱藏變量的近似后驗分布被更新時,α中的較多分量在收斂時均取較大的值。而隨著αn逐漸增大時,θn就會逐漸減小。這種情況下,部分較小值的網格n對觀測數據y的影響可以忽略不計。由此說明,可將對觀測數據未造成過多影響的網格從網格集∏中移除,并在迭代過程中進行實時網格裁剪,從而減少計算量。實驗中,主要根據α的當前近似后驗分布來裁剪網格,設定閾值αth, 則每次迭代中,網格集∏被更新為
∏new=∏old-{n|〈αn〉>αth}
(26)
其中,∏new表示裁剪后的網格集,∏old表示當前未經裁剪的網格集。由裁剪后的網格集可知,對無源字典Φ進行符合網格裁剪機制的裁剪,能夠保證本文中定位算法的計算量隨著無用網格數量的減少而降低。
此外,在每一次迭代中,測量殘差γ計算為
γ=y-Φμ2
(27)
設定測量殘差閾值γth, 當γ<γth或迭代次數達到最大迭代次數時,停止判斷。同時設定稀疏閾值μth, 濾除均值μ中較小的非零分量。取最后得到的均值向量μ作為無源目標定位結果。
3 仿真結果分析
本節中,進行了一系列仿真實驗來驗證所提算法的優越性能。在仿真中,目標監測區域A被設定為一個6.5 m×6.5 m的正方形區域。將其等分為N=169個邊長為0.5 m的正方形網格。K=4個待定位目標隨機分布在A中,M=26條由真實傳感器和虛擬傳感器構成的通信鏈路沿A的四周均勻分布。使用M條通信鏈路的接收信號強度值作為觀測數據。為檢驗所提算法的可靠性和魯棒性,在每個測量值上添加高斯白噪聲。測量值的信噪比定義為:SNR=10lg(Φθ22/(Mσ2)), 其中σ2表示噪聲向量ε的方差。仿真中,設定信噪比的默認值為20 dB。為驗證所提的基于多徑反射的變分貝葉斯壓縮感知(multiple path variational bayesian compressed sense,MPCS)無源定位方法能夠使得定位精度提高以及誤差率下降,首先通過仿真驗證本文所設計的網格裁剪機制相對于未裁剪機制的優越性;其次模擬現實變化的環境,提出環境影響因子的等級作為自變量,設計對比實驗驗證DFL-MPCS相比于其它3種算法:①基于正交匹配追蹤(orthogonal matching pursuit,OMP)的無源目標定位方法;②基于變分期望最大化(variational expectation maximization,VEM)的無源目標定位方法;③基于基追蹤(basic pursuit,BP)的無源目標定位方法能夠更好地適應變化環境,魯棒性更高;最后設計3組對比實驗,將DFL-MPCS分別與DFL-OMP、DFL-VEM、DFL-BP這3種無源目標定位方法對比,驗證所提方法能實現更高的定位精度。
3.1 驗證網格裁剪機制的優越性
首先,本節設計相關仿真實驗驗證所提網格裁剪機制的有效性,同時研究裁剪不同閾值αth對所提算法定位性能的影響。圖5展示了不同裁剪閾值 (αth=1,3,10,20,∞, 其中αth=∞為不進行網格裁剪)下,所提算法的平均定位誤差(此處的平均定位誤差是指真實目標位置和估計目標位置之間的平均歐氏距離),圖6展示了不同裁剪閾值下所提算法的平均定位時間。當αth=1時,平均定位誤差最大,如圖5所示。因為當αth的值越小時,越容易濾除包含了待定位目標的網格,而錯誤的裁剪將使得定位誤差率大幅上升,故不應選擇過于嚴苛的值。此外,當αth=10、αth=20和αth=∞時,定位誤差范圍均在可接受的范圍,且差別不大,但αth=∞為未進行網格裁剪,故不納入考慮范圍。因此,單純考慮平均定位誤差這一指標時,αth=10以及αth=20均可作為合適的裁剪閾值納入考慮范圍,不會影響系統的定位精度。隨著最大迭代次數τmax的增加,不采取網格裁剪機制將導致平均定位時間呈線性增加,而采取網格裁剪機制的方式其平均定位時間僅呈現小幅度上升,如圖6所示。同時,閾值αth的值越小,平均定位時間越短。綜上所述,采用網格裁剪機制并選用合適的閾值可有效降低運算復雜度,節省計算成本。基于以上仿真結果的相關分析,本文選取裁剪閾值αth=10, 既能使平均定位誤差保持在可接受的范圍,又能使平均定位時間在可接受的范圍,故能夠實現定位精度和計算成本均處于較佳的程度。

圖5 平均定位誤差

圖6 平均定位時間
3.2 驗證變化環境下DFL-MPCS的魯棒性
其次,由于現實環境中影響因素不可能是單純的理想白噪聲,故本節模擬了一個變化噪聲等級的環境,用于驗證所提方法的魯棒性。本文設計的變化環境中影響因子量化方法為在不斷變化的環境中,將環境相關的字典參數(Ak和ck)中加入高斯白噪聲。Ak和ck的值表示為
Ak(Ed)=A0+∑Edi=1εA
(28)
ck(Ed)=c0+∑Edi=1εc
(29)
其中,A0和c0分別表示為Ak和ck的初值。εA和εc均表示為加性高斯白噪聲,Ak和ck的方差分別設為0.5和0.01。Ed表示為環境影響因子等級。Ak(Ed) 和ck(Ed) 表示當環境影響因子的等級為Ed時,所對應的環境相關的字典參數值。
根據以上的參數設置,構建一個環境隨影響因子等級變化的無源字典Φ,并且通過Ak和ck得到不同環境影響因子等級下的模擬環境變化的測量值。如圖7所示,繪制了當環境影響因子等級(Ed)由1到12時,DFL-MPCS、DFL-VEM、DFL-BP以及DFL-OMP的平均定位誤差。從圖中可以看出,當Ed從1升到12時,4種方法的定位誤差均有相應增加。但DFL-MPCS相比于其它3種方法,其定位精度最高,由此可以表明DFL-MPCS更具有魯棒性。
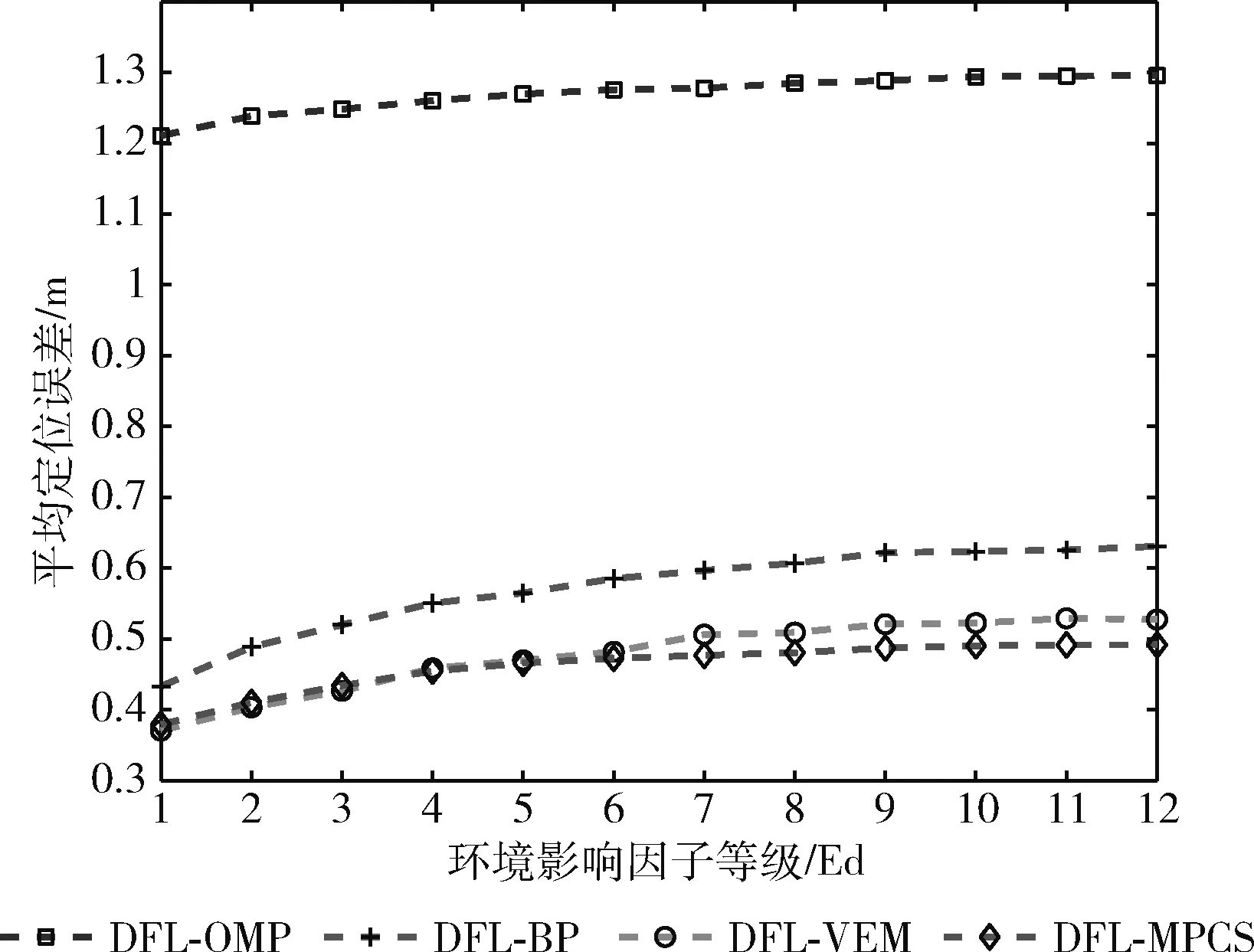
圖7 變化環境中4種算法對比
3.3 驗證DFL-MPCS的優越性
最后,設計3組對比實驗驗證DFL-MPCS與以下3種無源目標定位方法:①基于正交匹配追蹤的無源目標定位方法(DFL-OMP);②基于基于變分期望最大化的無源目標定位方法(DFL-VEM);③基于基追蹤的無源目標定位方法(DFL-BP),相比能夠實現更高的定位精度以及更低的誤差率。為確保實驗的嚴謹性以及科學性,將這3組對比實驗分為兩部分進行仿真實驗:①驗證DFL-MPCS、DFL-OMP、DFL-VEM、DFL-BP的稀疏重建性能。如圖8所示,表示4個待定位目標的初始位置向量,圖9則顯示4種無源定位方法進行稀疏恢復后的位置向量。聯立圖8及圖9可以看出,稀疏重構的DFL-OMP和DFL-BP的稀疏向量中有許多應當忽略但值卻非零的小系數,而這些非零小系數可能會導致待定位目標計數的誤差以及其定位性能的降低。稀疏重構的DFL-VEM稀疏向量中非零小系數以及顯著有用系數兩項指標,雖相較于DFL-OMP和DFL-BP有明顯改善,但仍不如DFL-MPCS。稀疏重構的DFL-MPCS稀疏向量中非零小系數含量極少,并且顯著有用系數的指標與待定位目標的初始位置向量基本保持一致。從而可以驗證,DFL-MPCS的稀疏向量恢復能力優于其它3種算法。②比較通過4種無源定位方法得到的估計目標位置與真實目標位置的差距。根據圖9所示的稀疏重構向量恢復圖可以通過仿真得到估計目標位置。如圖10所示,DFL-MPCS得到的4個待定位目標的估計位置與真實位置一致,而其它方法均存在錯誤的估計位置。

圖8 原始位置向量圖
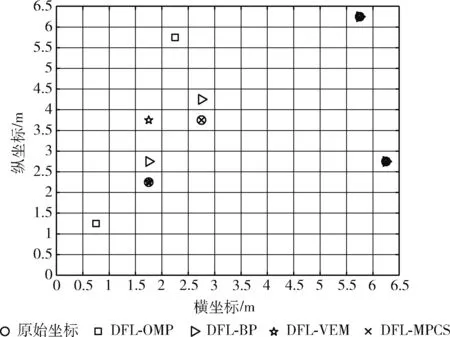
圖10 4種算法估計目標與真實目標位置比較
此外,如表1所示,記錄了4種無源定位方法的平均定位誤差以及平均定位時間(超5500次實驗)。結果清晰地表明,DFL-VEM和DFL-MPCS的平均定位誤差比其余兩種定位方法低,但與DFL-VEM相比,DFL-MPCS的定位時間要少近50%,說明在達到相同定位精度時,DFL-MPCS能夠更快速解決問題。實際上,DFL-MPCS由于采用網格裁剪機制,從而降低了其運算復雜度,即定位時間也得到了有效的降低。

表1 不同無源定位方法性能比較
4 結束語
本文分析了多徑效應下無源目標定位的特性,提出了一種利用多徑效應增加通信鏈路提高定位性能的方法。利用智能反射面的特性構建一種基于壓縮感知的系統模型,在壓縮感知理論體系中構建出虛擬節點模型。在基于RSS的定位過程中,驗證了應用反射信號增加通信鏈路的可行性。實驗結果表明,DFL-MPCS方法可以有效地利用多徑反射信號,以壓縮感知理論以及變分貝葉斯推理稀疏恢復理論為基礎,利用改進的橢圓權重模型量化目標的陰影效應,有效提高了定位精度,同時采取網格裁剪機制,降低了運算復雜度,節省了計算成本,最終達到快速精確定位。
在未來,考慮將結合智能反射面反射信號的多種特性和非基于RSS的定位方法,尋求一個更全面、更有效的無源目標定位方案,并優化解決方案,以適應更復雜的情況。
