基于改進(jìn)SMO與高階滑模速度控制器的永磁同步電機(jī)無(wú)位置傳感器控制
2023-09-14 11:53:14陸華才
安徽工程大學(xué)學(xué)報(bào) 2023年3期
胡 俊,陸華才
(安徽工程大學(xué) 電氣傳動(dòng)與控制安徽省重點(diǎn)實(shí)驗(yàn)室,安徽 蕪湖 241000)
永磁同步電機(jī)(Permanent Magnet Synchronous Motor,PMSM)具有工作效率高以及功率密度高等眾多優(yōu)點(diǎn)。隨著工業(yè)不斷發(fā)展,PMSM使用的地方越來(lái)越多,同時(shí)這也需要我們對(duì)電機(jī)有更好的控制[1]。在PMSM控制系統(tǒng)中需要得到轉(zhuǎn)子的速度和位置,這就需要我們采用大量的傳感器對(duì)這些信號(hào)進(jìn)行采集[2]。但由于PMSM工作的環(huán)境存在溫度和磁場(chǎng)的影響,可能會(huì)造成一些傳感器的檢測(cè)數(shù)據(jù)不準(zhǔn),甚至?xí)斐晒收稀U驗(yàn)槿绱?在最近幾年里,很多研究人員在無(wú)傳感器控制方面做了許多研究。其中PMSM的無(wú)位置傳感器常用控制方法有滑模觀測(cè)器(Sliding Mode Observer,SMO)、擴(kuò)展卡爾曼濾波器(Extended Kalman Filter,EKF)、模型參考自適應(yīng)(Model Reference Adaptive System,MRAS)等方法。
在上述的幾種無(wú)傳感器控制方法中,SMO具有魯棒性強(qiáng)的優(yōu)點(diǎn),所以經(jīng)常使用SMO作為無(wú)位置傳感器控制。但是,傳統(tǒng)的SMO控制方法由于使用了不連續(xù)的滑模面切換開(kāi)關(guān)函數(shù)的控制,在估計(jì)PMSM轉(zhuǎn)子的狀態(tài)時(shí)產(chǎn)生抖振效應(yīng),導(dǎo)致觀測(cè)轉(zhuǎn)子狀態(tài)的精度下降[3]。為了消除或減少滑模控制下的抖振效果,并提高轉(zhuǎn)子狀態(tài)估計(jì)的精度,采用在SMO中加入飽和函數(shù)等方法,替換傳統(tǒng)的符號(hào)開(kāi)關(guān)切換函數(shù)[4]。同時(shí)低通濾波器的使用會(huì)引發(fā)相位延遲現(xiàn)象[5]。為提高PMSM無(wú)傳感器控制系統(tǒng)的魯棒性和快速性,改進(jìn)的SMO用連續(xù)且平滑的雙曲正切線函數(shù)取代傳統(tǒng)SMO中的開(kāi)關(guān)函數(shù),從而有效地抑制觀測(cè)器輸出的抖振效果。同時(shí)將低通濾波器用卡爾曼濾波器來(lái)代替可以避免使用相位補(bǔ)償,使系統(tǒng)更加簡(jiǎn)潔。
現(xiàn)在工業(yè)中PMSM控制系統(tǒng)速度控制器采用的都是PI控制[6]。雖然PI速度控制器具有結(jié)構(gòu)簡(jiǎn)單的優(yōu)點(diǎn),但控制效果易受到外部擾動(dòng)的影響,得不到良好的動(dòng)靜態(tài)性能[7]。因此有學(xué)者考慮其他的控制策略對(duì)PMSM無(wú)傳感器控制系統(tǒng)的速度環(huán)進(jìn)行控制,例如滑模控制、分?jǐn)?shù)階滑模控制等控制策略。其中滑模控制是一種非常良好的非線性控制方法,具有受到系統(tǒng)外部擾動(dòng)的影響小且響應(yīng)速度快等優(yōu)點(diǎn),但是傳統(tǒng)滑模控制中會(huì)產(chǎn)生一定的抖振[8]。為了解決傳統(tǒng)滑模控制存在的抖振問(wèn)題,張慶超等[9]提出了高階滑模,既包含傳統(tǒng)滑模的優(yōu)點(diǎn),又可以抑制傳統(tǒng)滑模的抖振,提高了系統(tǒng)的控制精度[10]。因此本文采用快速Super-Twisting算法的高階滑模控制(FSTA),使用FSTA控制器代替模型中PI控制器環(huán)節(jié),提高轉(zhuǎn)子狀態(tài)觀測(cè)器精度和整體系統(tǒng)性能[11]。在MATLAB/Simulink中搭建仿真模型進(jìn)行驗(yàn)證,仿真結(jié)果表明,本文的設(shè)計(jì)方法不僅可以降低系統(tǒng)的抖振,同時(shí)也增加了轉(zhuǎn)子位置的精度,還加快了系統(tǒng)的響應(yīng)時(shí)間。
1 PMSM的數(shù)學(xué)模型
建立PMSM在兩相靜止坐標(biāo)下的數(shù)學(xué)模型[12]。電壓方程如下:
(1)
式中,uα、uβ分別是定子電壓;Rs是定子電阻;Ls是定子電感;iα、iβ分別是定子電流;p是微分算子。根據(jù)式(1)可以得到電流方程:
(2)
式中,Eα、Eβ分別為兩相反電動(dòng)勢(shì)。
(3)
式中,ωr為轉(zhuǎn)子角速度;ψf為磁鏈;θ為轉(zhuǎn)子角度。根據(jù)式(3)可以得到PMSM的轉(zhuǎn)子位置以及轉(zhuǎn)速:
(4)
2 改進(jìn)滑模觀測(cè)器的設(shè)計(jì)
2.1 傳統(tǒng)SMO的設(shè)計(jì)
根據(jù)式(2),我們可以構(gòu)造出滑模觀測(cè)器:
(5)

定義電流的觀測(cè)誤差為:
(6)

(7)
式中,K為增益系數(shù);sign()為符號(hào)函數(shù)。
然后經(jīng)過(guò)低通濾波器得到比較平滑的反電動(dòng)勢(shì):
(8)
式中,ωc為低通濾波器的截止頻率。
根據(jù)式(4)可以得到轉(zhuǎn)子位置和轉(zhuǎn)速的估計(jì)值:
(9)

(10)
傳統(tǒng)SMO的原理圖如圖1所示。

圖1 傳統(tǒng)SMO原理框圖 圖2 改進(jìn)SMO原理框圖

圖3 FSTA速度控制器仿真模型
2.2 改進(jìn)SMO的設(shè)計(jì)
雖然低通濾波器可以抑制抖振,但其效果有限,而且采用低通濾波器需要相位補(bǔ)償,增加了系統(tǒng)的復(fù)雜性。為此,本文建立了一種改進(jìn)的SMO,并在此模型的基礎(chǔ)上進(jìn)一步研究了雙曲正切函數(shù)的收斂速度對(duì)抖振的影響。
雙曲正切函數(shù)的公式:
(11)
基于雙曲正切函數(shù)構(gòu)建SMO的數(shù)學(xué)模型:
(12)
估計(jì)電流與實(shí)際電流的差值作為滑模面:
(13)

改進(jìn)的SMO模型如圖2所示。由于將普通的低通濾波器換成Kalman濾波器[14],所以系統(tǒng)不需要相位補(bǔ)償,結(jié)構(gòu)更加簡(jiǎn)化。
2.3 FSTA速度控制器
Super-Twisting算法只要知道滑模變量s,是二階滑模中最簡(jiǎn)單的滑模控制,當(dāng)s的階數(shù)為1時(shí),可直接使用二階滑模算法,不僅不需要引入新變量,還可以抑制抖振[15]。FSTA的方程:
(14)

定義滑模面:
s=ωr*-ωr,
(15)
得到FSTA的控制律為:
(16)

根據(jù)控制律搭建如下仿真模型,其中k1=0.85、k2=0.042 5、k3=500、k4=0.2。
3 仿真實(shí)驗(yàn)
基于FSTA速度控制器與改進(jìn)SMO的PMSM控制原理圖如圖4所示。為了驗(yàn)證上述系統(tǒng)設(shè)計(jì)的有效性和優(yōu)越性,根據(jù)圖4在MATLAB/Simulink中搭建仿真模型。系統(tǒng)設(shè)定仿真時(shí)間為0.05 s,本文方法和傳統(tǒng)SMO控制方法進(jìn)行對(duì)比考察其控制效果。仿真采用Simulink內(nèi)置的PMSM模型,其相關(guān)參數(shù)如表1所示。

表1 PMSM參數(shù)
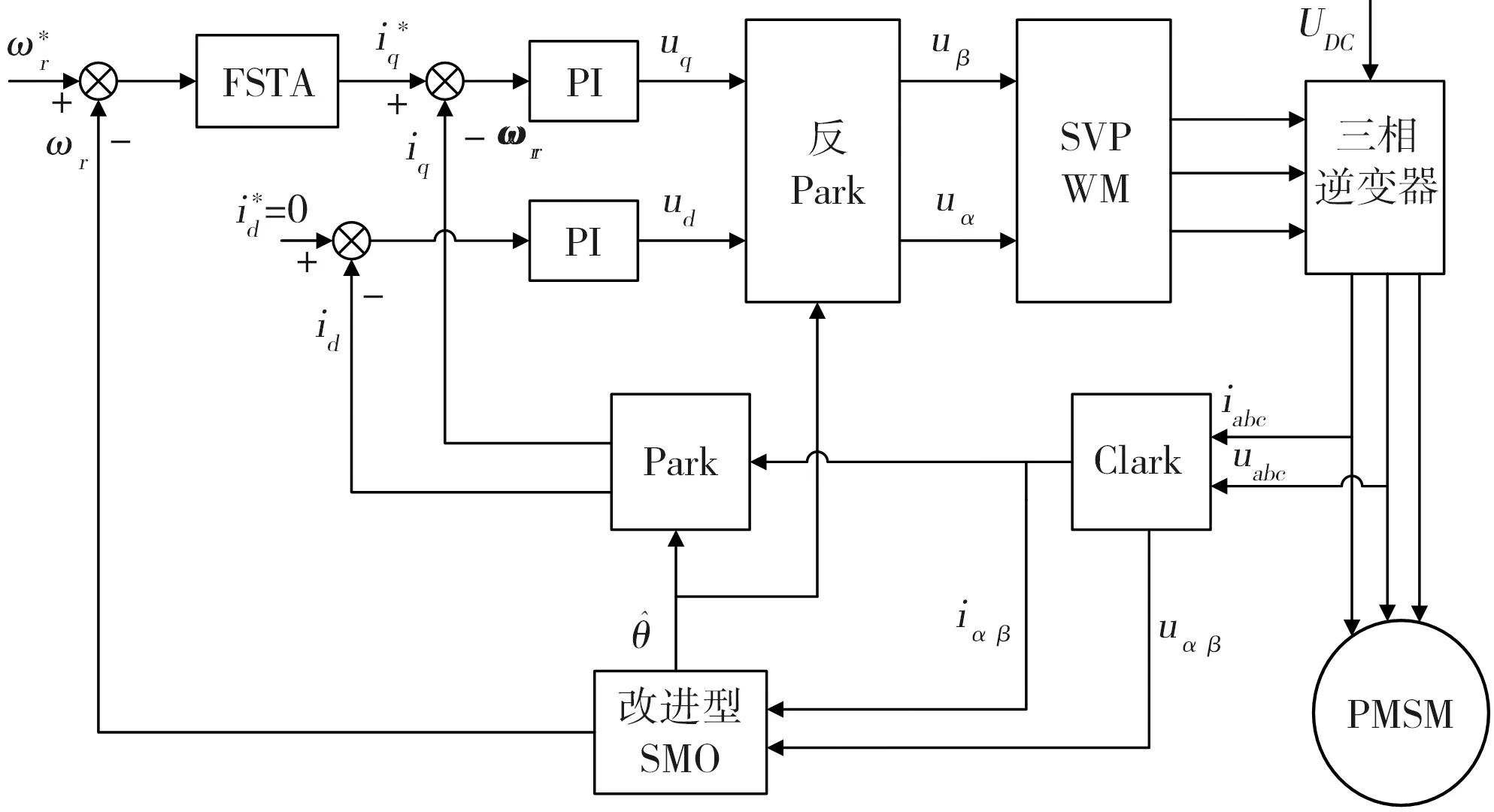
圖4 PMSM無(wú)傳感器控制系統(tǒng)結(jié)構(gòu)圖
3.1 傳統(tǒng)SMO仿真

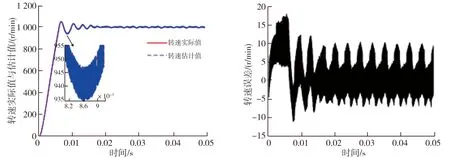
圖5 傳統(tǒng)SMO控制的電機(jī)轉(zhuǎn)速 圖6 傳統(tǒng)SMO控制的電機(jī)轉(zhuǎn)速誤差
電機(jī)的轉(zhuǎn)子位置的對(duì)比圖如圖7所示。其中實(shí)線代表電機(jī)轉(zhuǎn)子的實(shí)際位置,虛線代表電機(jī)轉(zhuǎn)子的估計(jì)位置。從圖7中可以看出轉(zhuǎn)子位置估計(jì)值不僅存在一定的相位差,還有一些抖振。從圖8的轉(zhuǎn)子位置誤差圖可以清晰地看出抖振比較大。
3.2 改進(jìn)SMO仿真
為了在相同條件下比較改進(jìn)的SMO控制方法和傳統(tǒng)SMO控制方法的優(yōu)越性,讓電機(jī)在1 000 r/min的情況下轉(zhuǎn)動(dòng)起來(lái),其電機(jī)的轉(zhuǎn)速實(shí)際值和估計(jì)值的對(duì)比圖如圖9所示。其中實(shí)線代表電機(jī)的實(shí)際轉(zhuǎn)速,虛線代表電機(jī)的估計(jì)轉(zhuǎn)速。通過(guò)與圖5比較發(fā)現(xiàn),改進(jìn)SMO的方法僅可以消除抖振,但是其趨于穩(wěn)定的時(shí)間較久。根據(jù)圖10所示的轉(zhuǎn)速誤差圖與圖6對(duì)比可以看出本文的方法具有更小的系統(tǒng)抖振,保證了系統(tǒng)可以更加穩(wěn)定安全地運(yùn)行。
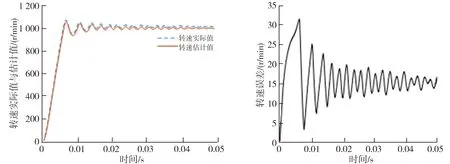
圖9 改進(jìn)SMO控制的電機(jī)轉(zhuǎn)速 圖10 改進(jìn)SMO控制的電機(jī)轉(zhuǎn)速誤差
電機(jī)的轉(zhuǎn)子位置的對(duì)比圖如圖11所示。其中實(shí)線代表電機(jī)轉(zhuǎn)子的實(shí)際位置,虛線代表電機(jī)轉(zhuǎn)子的估計(jì)位置。從圖11中我們可以看出,轉(zhuǎn)子位置估計(jì)值可以穩(wěn)定地跟蹤轉(zhuǎn)子位置的實(shí)際值,沒(méi)有抖振。改進(jìn)SMO控制的電機(jī)轉(zhuǎn)子位置誤差如圖12所示。從圖12可以清晰地看出線條平滑,沒(méi)有抖振的存在,而且轉(zhuǎn)子位置的估計(jì)精度也有了一定的優(yōu)化。
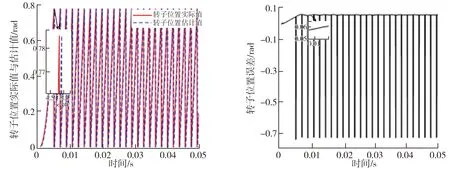
圖11 改進(jìn)SMO控制的電機(jī)轉(zhuǎn)子位置 圖12 改進(jìn)SMO控制的電機(jī)轉(zhuǎn)子位置誤差
3.3 FSTA+改進(jìn)SMO方法仿真
雖然改進(jìn)SMO控制對(duì)整個(gè)系統(tǒng)有了一定的優(yōu)化,但是對(duì)轉(zhuǎn)速收斂還是比較慢。因此為了增加系統(tǒng)的快速性以及魯棒性能,本文增加了一個(gè)FSTA速度控制器來(lái)增加系統(tǒng)的快速性及魯棒性。仿真條件不變即讓電機(jī)在1 000 r/min的情況下轉(zhuǎn)動(dòng)起來(lái),其電機(jī)的轉(zhuǎn)速實(shí)際值和估計(jì)值的對(duì)比圖如圖13所示。其中實(shí)線代表電機(jī)的實(shí)際轉(zhuǎn)速,虛線代表電機(jī)的估計(jì)轉(zhuǎn)速,可以看出在0.02 s時(shí)轉(zhuǎn)速就已經(jīng)達(dá)到穩(wěn)定。根據(jù)圖14所示的轉(zhuǎn)速誤差圖與圖10對(duì)比可以看出,本文方法具有比較良好的收斂性,而且轉(zhuǎn)速波動(dòng)也比較穩(wěn)定。
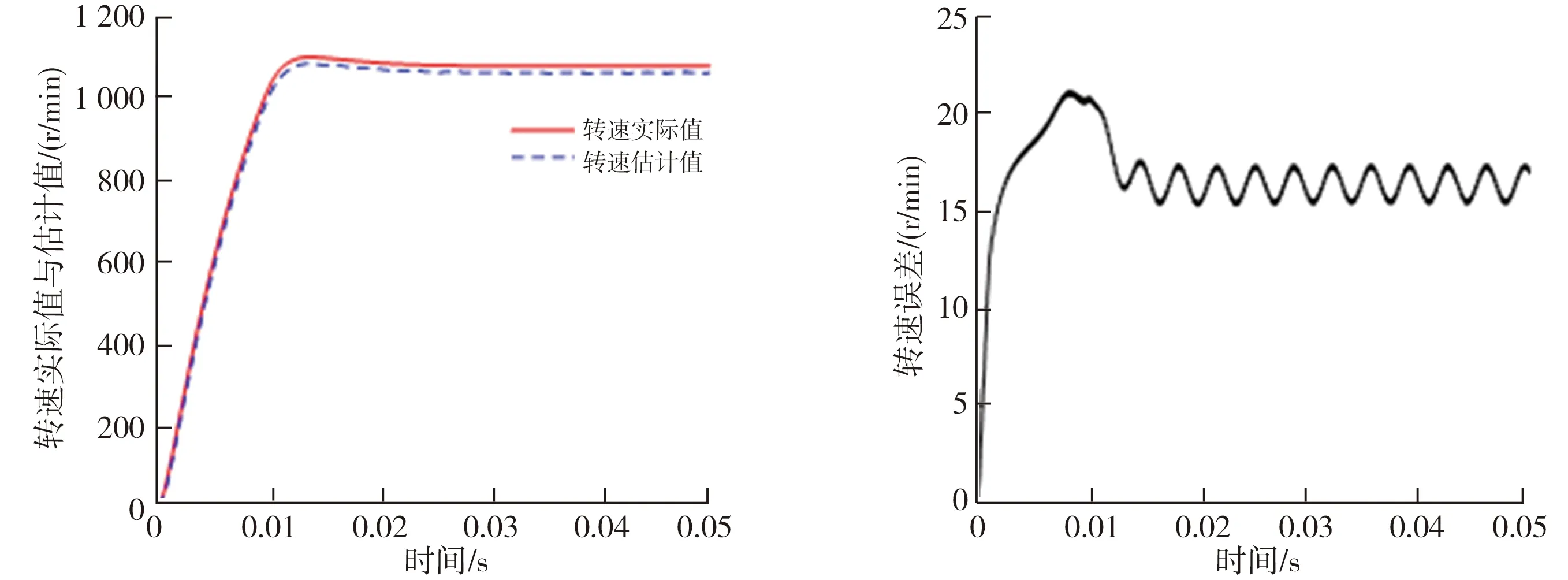
圖13 本文方法控制的電機(jī)轉(zhuǎn)速 圖14 本文方法控制的電機(jī)轉(zhuǎn)速誤差
3種不同控制系統(tǒng)下的三相電流波形如圖15所示。與傳統(tǒng)的SMO和改進(jìn)的SMO相比,本文所用的方法三相電流曲線在0.018 s時(shí)就開(kāi)始收斂,電流的波動(dòng)幅值僅在-10~15 A之間。
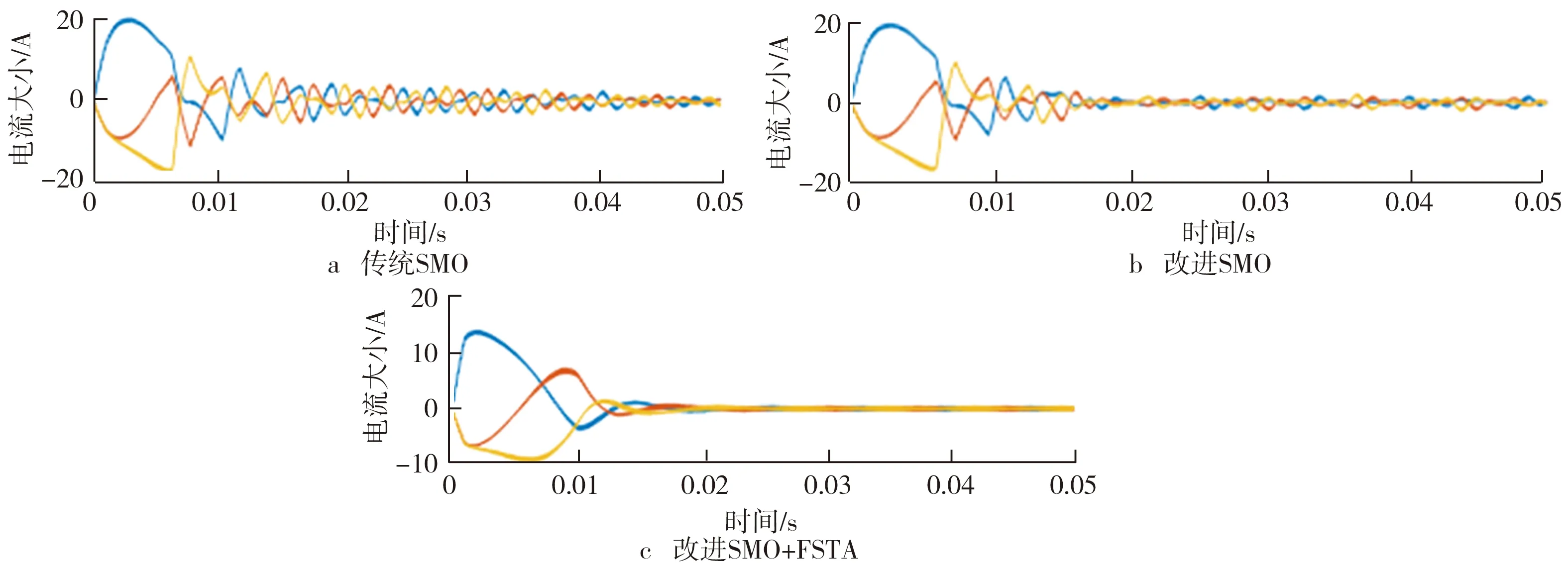
圖15 3種控制方法的電機(jī)電流
4 結(jié)束語(yǔ)
為了提高PMSM無(wú)位置傳感器控制系統(tǒng)的快速性和魯棒性,本文提出把FSTA速度控制器和改進(jìn)的SMO同時(shí)使用的控制方法。首先改進(jìn)型SMO采用雙曲正切函數(shù)作為控制函數(shù)用來(lái)替代sign函數(shù),然后利用卡爾曼濾波器代替以前的低通濾波建立了一種改進(jìn)的SMO,與傳統(tǒng)的SMO控制系統(tǒng)相比無(wú)需相位補(bǔ)償就能有效抑制抖振。基于改進(jìn)SMO的PMSM在采用FSTA控制器時(shí)速度具有更快達(dá)到穩(wěn)態(tài),還有進(jìn)一步消除轉(zhuǎn)速的抖振的特點(diǎn)。在位置觀測(cè)方面,有效地消除了啟動(dòng)時(shí)刻的瞬時(shí)和劇烈抖振,提高了啟動(dòng)時(shí)刻的位置觀測(cè)精度。總體而言,改進(jìn)后的SMO大大提高了參數(shù)辨識(shí)能力,有效地改善了永磁同步電機(jī)的控制性能。最后仿真結(jié)果表明,該方法比傳統(tǒng)的控制方法具有更好的控制性能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12