水下作業機械手軟連接操作包
2023-09-15 09:15:34劉江平楊向前王沙利
機械工程師 2023年9期
劉江平,楊向前,王沙利
(1.三一重工股份有限公司,長沙 410100;2.中海油研究總院,北京 100028;3.重慶夢馬致新科技有限公司,重慶 400065)
0 引言
水下機器人(ROV)作為海洋資源開發的重要工具之一,其需求也日漸增大。作業功能是水下機器人技術開發與應用的關鍵技術,作為作業功能主要承擔者,水下機械手是大中型水下機器人的必備裝置[1-4]。液壓機械手是一套復雜的系統,涉及到機械、液壓、材料、流體力學、自動控制、通信系統等多學科,它的性能水平直接反映了一個國家的綜合工業水平[5-8]。為滿足大多數作業型ROV作業需求,需要設計操作靈活的深海七功能機械手(帶夾爪)。同陸地機械手相比,水下機械手長期浸泡在海水中,因此選取的相關材料必須耐腐蝕。
本文研制了一款水下作業機械手,旨在提升水下環境下重載作業的靈活性,需要研究設計具有多關節機構、液壓傳動、高強度且耐海水腐蝕的機械手,實現結構功能一體化設計,來滿足深水應用要求[9-10]。絕大多數ROV配有水下機械手,用于主要作業。本項目所研制的作業機械手為七功能機械手,符合當前世界上大多數ROV使用需求。同時,所研制機械手具有操作簡單、作業水深大、耐腐蝕、強度高及易維護等特點,產品技術達到國際領先水平[11-18]。
隨著機械手技術的進步,機械手的性能不斷提高,機械手的應用領域正在不斷擴展。為了滿足不斷提高的任務復雜性、操作智能性及系統柔順性等要求,雙機械手乃至多機械手之間的協調和協同作業是機械手技術在工業環境中的推廣和應用急需解決的關鍵技術之一[19]。目前國內水下機械手技術尚未成熟,水下作業型ROV所采用的機械手產品大都依賴進口。美國、日本、法國及俄羅斯的水下作業機械手研究和運用水平較高。典型的七功能機械手皆為6自由度帶夾具的結構,其自由度配置方式和順序大致相同,區別在于運動范圍及動作能力[20]。
通過本項目的成功研制,實現水下作業機械手的國產化,同時將機械手以操作包模塊的方式應用到水下作業,該技術的掌控將打破國外多年來的技術封鎖和產品壟斷,逐步實現我國海洋油氣資源裝備開發的完全自主化,為我國海洋油氣資源的安全開發提供保障。
1 結構設計
1.1 設計指標
水下作業機械手是完成水下作業的最理想設備,它可以模擬人的手臂在一般潛水技術無法達到的深度進行綜合考察和研究,并完成多種作業。本項目所研制的機械手對標FMC T4機械手,處于國際領先水平,技術成熟。該機械手采用內置油路,整個機械手只有一進一出2根油管,極大地減輕了設備質量,且避免了軟管纏繞的操作風險。另外,該機械手采用內置控制模塊,精簡了整體結構,使得其能在小體積情況下,提供大承載力和操作轉矩。為了方便平臺操作,配合長液壓缸臂架設計了水下操作包,可以模擬實現水下ROV的部分功能,實現對淺水裝置觀察和操作。水下操作包的主要參數如表1所示。

表1 水下操作包主要參數
1.2 結構設計
水下操作包主要由七功能機械手、五功能機械手、上下補償裝置、照明燈與攝像頭、減速機組件、蓄能器、晃動與旋轉關節、鎖定缸、控制箱和安裝架等組成,其總體結構組成如圖1所示。

圖1 水下作業機械手軟連接結構組成
1.2.1 水下作業機械手
水下軟連接操作包配備有五功能和七功能作業機械手各1套。七功能機械手主要由基座、肩部、上臂、關節、前臂、腕部和夾爪組成。與七功能相比,五功能機械手精簡了腕部的上下翻轉和左右翻轉功能。七功能機械手結構如圖2所示,五功能機械手如圖3所示,兩種機械手的主要性能參數如表2所示。

圖2 七功能機械手結構

圖3 五功能機械手結構
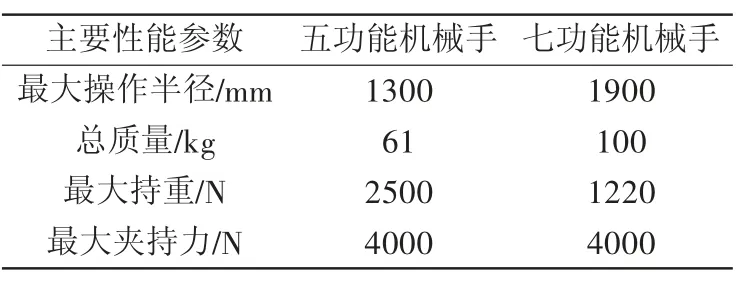
表2 機械手主要性能參數表
七功能機械手實現主要的作業操作,功能及操作范圍廣,可以在較為復雜的區域實現操作;五功能機械手主要用來固定七功能機械手基座,減少外部晃動對作業的影響,同時其抓緊力大,可以用來移動較重的物體,二者相互配合,形成互補。
1.2.2 上下補償裝置
上下補償裝置主要由外臂、內臂和液壓缸組成。其中外臂連接對接法蘭,內臂連接旋轉關節。內外臂通過液壓缸相連。液壓缸活塞桿端連接蓄能器,由蓄能器提供上下補償的力。活塞端連接伺服閥,可以通過打壓調節上下位置,實現操作包的微調操作。水下補償裝置結構如圖4所示,其主要參數如表3所示。軟連接下端質量為473 kg,液壓缸最大作用力為22 000 N,足夠承受豎直方向上4.7倍重力加速度的沖擊。

圖4 上下補償裝置

表3 上下補償裝置主要性能參數表
1.2.3 照明燈與攝像頭
攝像機是一款面向水下機器人、水下監控等領域專門設計的深水攝像機。攝像機采用低光照星光級CMOS傳感器,高達300萬像素,性能穩定可靠。窗口選用高透光率復合材料透鏡,成像效果更佳。水下照明燈為四合一型,即4 個 燈 共 用1 組線。線纜長度為88 m,直接連接平臺控制中心,由平臺進行控制,其布置示意如圖5所示。

圖5 照明燈與攝像頭布置示意圖
1.2.4 減速機組件
減速機組件為安裝架的旋轉提供動力,配置有一個OMM 50液壓馬達和定制1:30減速機,安裝在一個長度為540 mm的滑軌上,可滿足上下補償裝置400 mm的行程范圍。減速機輸出軸通過萬向軸連接旋轉關節,其結構如圖6所示。

圖6 減速機組件結構圖
1.2.5 晃動與旋轉關節
晃動與旋轉關節主要由球座、球關節、固定塊、滑塊、鎖定球和鎖定液壓缸組成,可實現操作包±20°晃動和±180°旋轉。鎖定球上有鎖定槽,可通過液壓缸推動鎖定球到槽內完成晃動鎖定,其結構如圖7所示。

圖7 晃動與旋轉關節結構圖
1.2.6 控制箱
控制箱主要由防水殼、控制模塊、電磁閥、伺服閥和閥板等組成。通過螺栓和框架固定在一起。控制箱可實現五功能機械手的操作、上下補償控制、操作包旋轉和旋轉關節鎖定等功能。七功能機械手自帶控制模塊,控制箱僅提供接線箱的功能,其布置如圖8所示。

圖8 控制箱布置圖
2 工作模塊
2.1 水下作業模塊
本軟連接操作包安裝五功能和七功能水下作業機械手,水下作業時一個夾持,另一個操作,既消除了操作包的晃動對作業的影響,又擴大了操作包的作業范圍。同時選擇五功能和七功能機械手,有效降低整體控制復雜程度,減輕操作包的質量,二者相互配合,形成互補,更加經濟適用。
機械手固定在安裝架上,安裝架頂部設置有軟連接調節機構,包含升降驅動組件、旋轉驅動組件和下放應力消除組件,既能用于與水下作業機械手操作包下放和上提的整體升降系統連接,又能微調水下作業機械手操作包的位置和姿態。
2.2 位置調整模塊
升降驅動主要通過上下補償裝置來實現的,其外臂上端與基座固定,內臂基座通過晃動與旋轉關節連接,升降液壓缸的缸體安裝在前臂上,活塞桿與內臂基座相連,通過升降液壓缸活塞桿的伸縮調節上下補償裝置的長度,從而調整操作包安裝架的上下位置。
旋轉驅動主要通過減速機組件和晃動與旋轉關機來實現,減速機組件安裝在前臂滑軌上,升降驅動裝置和下放應力消除組件的位置變化對旋轉驅動裝置不會造成影響。減速機組件通過萬向軸連接晃動與旋轉關節,液壓馬達驅動通過蝸桿減速機傳遞到萬向軸,帶動晃動與旋轉關節內部球關節和安裝架旋轉,從而調整操作包安裝架的圓周運動。
球關節上開設有一環形凹槽,其中心軸線與轉動軸線重合。球座沿圓周方向分布有至少3個沿徑向貫穿的鎖定球引導孔,該孔的內端均正對環槽,孔中配置有鎖定球;球座的外周面上配置鎖定液壓缸,分別與引導孔一一對應,各鎖定液壓缸的活塞桿分別向內插入對應的孔中,當液壓缸的活塞桿將對應的鎖定球頂入環槽時,各鎖定球均部分位于環槽中,部分位于引導孔中,以使球關節只能沿上連接軸的轉動軸線轉動。采用以上結構,在水下作業機械臂操作包下放到位以后,能夠通過各鎖定液壓缸將球體鎖定為絕對水平的姿態,即將下放的安裝架和機械手鎖定為絕對水平的姿態,確保機械手后續作業的精確可控。
2.3 應力消除模塊
應力消除組件主要包括升降驅動裝置、萬向傳動機構和晃動與旋轉關節。主軸、萬向軸和上連接軸組成多連桿結構,配合滑軌和滑塊,使升降驅動組件能夠通過球座帶動安裝架升降,使旋轉驅動組件的主軸能夠通過萬向軸和支撐球帶動安裝架旋轉,使安裝架承受應力變化時,能夠通過球座自適應地進行晃動,消除應力,實現軟連接。
在操作包下放和回收的過程中,通過下放應力消除組件自適應地相對主軸進行晃動,從而實現安裝架與主軸的軟連接,進而能夠完全自適應地消除海水對水下作業機械手操作包各部分產生的應力,有效保護水下作業機械手操作包,避免水下作業機械手操作包出現損壞。同時,連接件安裝有與升降液壓缸的油路連通的蓄能器,當升降液壓缸油路的瞬間壓力增大時,蓄能器可以吸收這部分能量,起到很好的緩沖作用,以保證升降液壓缸的穩定運行。
3 聯合調試
該水下作業機械手軟連接操作包用在三一泵送公司75 m水下機械臂末端,用于水下作業。最大作業深度為55 m,可以完全替代水下深潛器進行油氣田水下生產系統作業,也可拓展應用在船舶水下檢修、大壩水下檢修、海底電纜油管檢修、水下打撈和救援等眾多領域,具有較為廣泛的水下作業用途。
現場進行陸上模擬安裝調試,對于軟連接操作包,只需機械臂端提供壓力為20 MPa一進一出的液壓回路,通過軟連接操作包控制系統即可完成水下作業、位置調整、應力消除等功能,如圖9所示。經過現場聯合調試,水下機械臂與機械手軟連接操作包陸地操作配合默契,軟連接操作包各功能模塊能正常運行,符合前期設計需求,目前計劃在渤海海域進行水下調試。

圖9 現場聯合調試
4 結論
本文介紹了一款水下作業機械手軟連接操作包,不僅具備升降和旋轉調節的功能,應對更加復雜惡劣的工作環境,還通過增設下放應力消除組件,使安裝架在主軸的驅動下旋轉,同時在下放和回收過程中,通過下放應力消除組件自適應地相對主軸進行晃動,從而實現安裝架與主軸的軟連接,能完全自適應地消除海水對水下作業機械手操作包各部分產生的應力,有效避免水下作業機械手操作包出現損壞。經過和三一水下機械臂聯合調試,基本達到水下作業要求,為避免采油作業關鍵設備被國外卡脖子做出了貢獻,有效防范國外就采油水下深潛器對我國的出口限制。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
故事大王(2016年7期)2016-09-22 17:30:08
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54