基于梯度提升決策樹的鍋爐燃燒優化控制策略研究
2023-09-19 13:34:02王藝晴
電子設計工程 2023年18期
肖 勇,馬 樂,胡 波,王藝晴,毛 華
(西安熱工研究院有限公司,陜西西安 710054)
鍋爐燃燒控制系統的合理管控,對于提高燃燒效率、減少污染物排放及降低成本具有重要意義[1-3]。其中,超超臨界的鍋爐燃燒調整需要基于風煤比、煤水比與功煤比進行。但由于超超臨界鍋爐受到多種因素的影響,故其具有強耦合度及高非線性的特點,需要進行大量的反饋校正與基于經驗的調整。換言之,只有當系統出現問題時才會進行校正,極大地降低了效率,并有可能影響調整效果。此外,若校正設置不合理,還會帶來相反的結果,影響鍋爐及周邊設備的安全運行。因此,開展超超臨界鍋爐燃燒的最優化控制研究至關重要。
文中針對超超臨界鍋爐的最優化控制問題,引入了梯度提升決策樹(Gradient Boosting Decision Tree,GBDT)技術,同時基于燃燒粒子模型建立了相關算法,并通過實驗進行了驗證。
1 鍋爐燃燒模型
該研究中的鍋爐模型由一組偏微分方程構成[4],這些方程描述了氣態流體在反應爐中的時間及空間運動。此外,還使用了非均質模型,用于預測氣固相之間的邊界層厚度等重要屬性。
該文設計的鍋爐燃燒模型考慮的假設如下:
1)反應粒子被建模為完美的球形粒子;
2)反應粒子具有恒定的體積;
3)反應粒子顆粒具有宏觀上均勻的結構,且不受反應的影響;
4)反應粒子顆粒內金屬氧化物分布均勻;
5)反應器內的反應粒子分布均勻。
圖1 為反應爐示意圖,其說明了反應器模型與反應粒子模型在邊界條件下的相互作用。在此基礎上,建立反應器和反應粒子的質量及熱平衡方程。
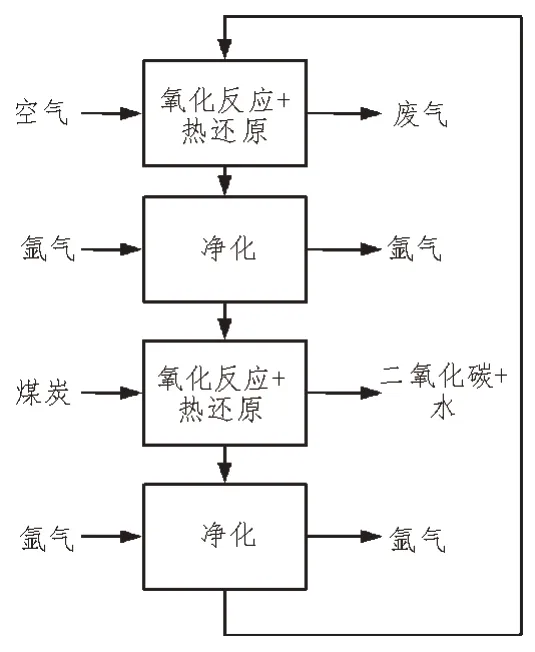
圖1 反應器示意圖
填充床反應器的質量和能量平衡公式如下:
式中,Ci,j為階段j的初始濃度,Fi,j為氣體種類的摩爾流量,Daxi,j為第j階段物種i的軸向色散系數,x和z表示反應器的兩個方向,t為時間,V為流速。εb、Ac、kci,j和av為對應標量參數,Tcj和Tj分別表示入口及反應中的溫度[5]。同樣,體相的邊界條件如下:
式中,yifeedj為進料中第i種物質的摩爾分數,Finj為入口處氣體種類i的摩爾流量,Ac為直管截面積,Cpjj為反應粒子在階段j的熱容量,ρin,j為j階段氣體混合物的熱導率,εb和λaxj是對應的標量參數。
在反應器的質量與能量平衡方程中,軸向位置由z(0≤z≤L)表示,L為反應器的長度。類似地,時間變化表示為t(0≤t≤tj,final),其中tj,final表示反應中每個階段j的批處理時間。此外,Tj(z,t)表示反應過程中每個階段在空間及時間域上的溫度分布。式(1)-(2)明確考慮了反應器體相與位于反應器中軸向位置z的反應粒子顆粒間的對流、軸向擴散、質量和熱傳遞;式(3)-(4)表述的邊界條件,分別描述了反應器入口處的質量和熱量進料流條件;式(5)則描述了反應器出口流的質量與隔熱條件,而方程式(6)描述了每個階段j的入口質量通量。
反應粒子的質量和能量平衡公式如下:
粒子相所需的邊界條件如下:
式中,粒子的徑向位置由rc(0≤rc≤Rp)表示;Rp表示粒子的半徑;Ci,j(z,r,t)表示粒子徑向和時間域中在每個階段j時氣體種類i的濃度,而Tcj(z,r,t)則表示反應過程中每個階段j的粒子溫度曲線。式(7)-(8)所示的粒子模型明確考慮了徑向擴散。式(9)則描述了反應粒子中心的質量及隔熱條件,并在此基礎上使用方程(7)-(8)中的Ri,j描述反應過程的動力學項。
2 基于梯度決策樹的優化控制
該文在建立了鍋爐燃燒反應模型的基礎上,使用梯度提升決策樹研究鍋爐燃燒的優化策略[6]。其中,XGBoosting(Extreme Gradient Boosting)是最常用的梯度決策樹算法之一。當決策樹在此過程中生長時,XGBoosting 通過計算方差增益來執行拆分[7]。例如,令O為決策樹固定節點上的訓練集,則該節點在節點d處分裂特征j的方差增益可表示為:
對于特征j,梯度決策樹算法選擇=arg maxdVj(d)并計算最大增益[8-9]。然后根據特征j?在點dj處將數據拆分為左右子節點。大多數梯度決策樹學習算法如該文使用的XGBoosting 均是按層次生長樹,這意味著在每個集成時間步長,最深層次的所有節點均會增長。
LightGBM(Light Gradient Boosting Machine)是微軟開發的開源梯度提升決策算法軟件[10-11]。其使用基于直方圖的算法來加快訓練過程、減少內存消耗,同時結合先進的網絡通信來優化并行學習,故被稱為并行梯度決策算法。該算法使用逐葉策略進行樹的生長,并找到具有最大方差增益的葉子進行分割。此外,還可通過計算變化增益的方式將其與其他梯度決策模型加以區分。在LightGBM 中,考慮到弱學習器與強學習器的區別,根據子集估計方差的最大增益對實例進行分割。
2.1 數據處理
若數據出現缺失,則所用算法的表現可能不佳,因此需要對數據加以處理,即數據清洗[12-14]。文中數據處理根據以下規則對所有數據集中的缺失值進行替換:若缺失觀測值的數量少于該特征實例總數的5%,則刪除這些觀測值;而在其余情況下,缺失值將替換為相應特征的眾數;此外,還對可能的異常值進行了分析。
數據處理的第二階段是將分類特征轉換為數值,以便于后續處理。
2.2 模型訓練
為了對測試集進行預測,LightGBM 訓練過程中使用的主要參數為葉子數、葉子中的最小數據量與線程數,目標是通過梯度決策樹算法使數據回歸。同時采用分層隨機抽樣方法(Stratified Random Sampling)將已處理過的數據集劃分為更小的組[15],且該方法的分層是根據相似的屬性或特征形成的。此外,在LightGBM 中有必要為執行的所有訓練定義層數。通過使用分層隨機抽樣方法,可以提供更多的子集來訓練模型,進而使模型表現更優。
2.3 評價標準建立
在所有可能的模型評估指標中,均方根誤差(RMSE)沒有物理單位,其可用于衡量LightGBM 和XGboosting 預測值之間的差異。故該文選用RMSE跟蹤預測誤差的大小并衡量模型的執行情況[16]。RMSE 是對預測值與實際值的差的平方求均值后的平方根,計算公式為:
式中,n是觀察次數,yj是預測值,是實際值。
3 實驗驗證
首先對梯度提升決策樹算法部署進行實驗驗證,將迭代次數固定為1 000 次,并計算了時間與RMSE 等輸出度量,具體如圖2 所示,其中RMSE 為虛線上每個點的標簽。觀察圖2 可知,對于較小的學習率,當時間最大時訓練精度的表征RMSE 并不是最優的。而隨著學習率的增加,處理時間逐漸減少,但RMSE 值的變化并未出現明顯差異。因此,在將該算法用于鍋爐的最優控制策略時,需要在訓練時間成本與準確性之間做取舍。

圖2 時間、RMSE與學習率的關系曲線
為了對選擇部署的模型進行說明,該文對兩種梯度提升決策樹技術的部署算法LightGBM 和XGBoosting 進行了驗證,以證明LightGBM 作為梯度提升決策樹組合模型的性能更優。因此,為這兩種情況設置了相同的參數集及固定的學習率、迭代次數等信息。測量二者的RMSE,結果如圖3 所示。從圖中可以發現,LightGBM 在使用的所有學習率間隔中均比XGBoosting 表現更優,由此表明了LightGBM更適用于設計鍋爐燃燒的優化控制策略。
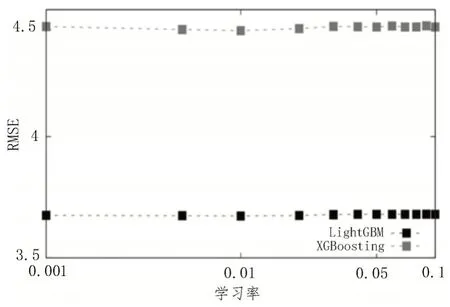
圖3 LightGBM和XGBoosting性能對比實驗
此外,為了驗證文中基于梯度提升決策樹的鍋爐燃燒最優控制策略的優越性,還設計了兩種情形。表1 為兩種情形的具體參數,包括各種初始條件。實驗1 相比于基本實驗情況,入口溫度更高,故其出口溫度也會較高。這便需要在控制反應物流通量的基礎上,對反應爐的壓力與溫度加以控制,因而也對燃燒控制算法提出了更加嚴苛的要求。而實驗2 所代表的情形中,在提高了壓力的基礎上降低了入口溫度,因此控制算法將重點改變反應物的流通速率。
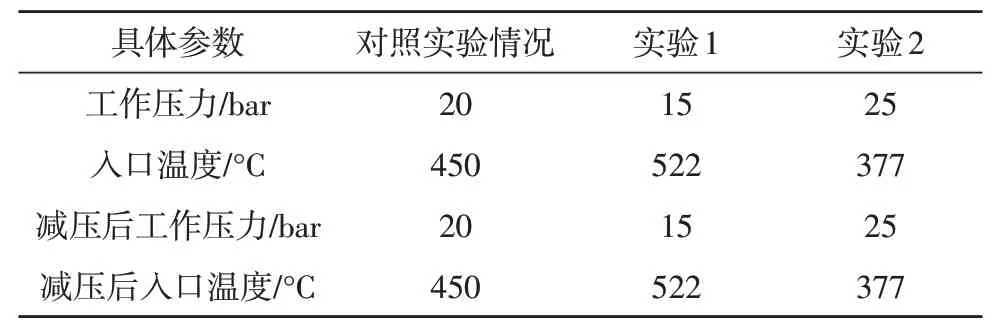
表1 優化實驗參數
優化控制策略增加前后的對比實驗如圖4 所示。由圖可知,實驗1 有更長的熱回收過程,即出口氣體溫度保持額外的時間約為300 s;實驗2 的輸出能量隨著過程的發展而逐漸降低。通過積分運算可知,優化前的基本情景能夠產生36.6 MW·h 能量,實驗1 產生45.9 MW·h 能量,增加了26%的產能;實驗2產生了43.2 MW·h 能量,增加了18%的產能。

圖4 優化控制策略增加前后的對比實驗
4 結束語
為了提高燃燒效率,文中對具體燃燒的情況進行了分析,并建立了燃燒粒子的鍋爐燃燒模型,實現了對于氣態流體在反應爐中時空運動的準確描述,從而為控制策略的設計提供準確的系統模型。但由于燃燒粒子模型數據量較大,傳統的單輸入輸出控制算法難以進行準確控制,因此該文引入梯度提升決策樹技術,研究了大量數據情況下鍋爐燃燒的最優化控制策略。通過實驗,對算法的部署及控制算法的有效性進行了探索。
鍋爐模型建模的復雜程度,會進一步決定優化策略的有效性。此外,使用傳感器網絡進行控制反饋,對于控制精度的提升也具有重要意義。因此,該研究的下一步工作將在有限計算資源的情況下進行,以提高建模的精度,并建立高效、準確的傳感器網絡,從而實現更為環保的鍋爐燃燒控制算法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
