基于機器視覺的圖像高維特征智能提取算法
2023-09-19 13:34:30李明磊趙俊杰
電子設計工程 2023年18期
關鍵詞:特征
李明磊,趙俊杰,李 翔
(1.中信戴卡股份有限公司,河北秦皇島 066011;2.廣州引力波信息科技有限公司,廣東廣州 510000)
高維特征能夠反映出目標圖像中像素節點的分布形式,在進行參量提取的過程中,能夠提供大量的可參考信息。然而,隨著原始圖像存儲空間的不斷增大,所選定投影向量與真實向量之間的差值水平也會逐漸增大,這就會對主機元件準確提取圖像高維特征參量造成較大壓力[3]。以3D 輪轂模型為例,改進SIFT 提取方法雖然能夠準確定義投影向量的長度值水平,但卻并不能將其取值結果控制在既定數值區間之內,這就使得投影向量與真實向量之間的差值水平始終難以得到有效控制[4]。
為解決上述問題,引入機器視覺技術的應用思想,并以此為基礎,設計一種新型的圖像高維特征智能提取算法。
1 基于機器視覺的圖像特征匹配
1.1 視覺坐標系
圖像的基礎處理只能得到高維特征節點在二維空間內的像素坐標信息,而在機器視覺理論的認知中,線性攝像機模型反映的卻是所選擇特征節點的三維空間坐標信息,故而在實施圖像特征匹配處理的過程中,應按照像素節點的三維分布形式構建視覺坐標系[5-6]。一個完整的機器視覺坐標系應同時包含X、Y、Z三個物理坐標軸,且坐標軸正方向的選取必須遵循像素點坐標由小至大的排列原則。具體的視覺坐標系求解表達式如下:
1.2 圖像參數標定
圖像參數描述了所選像素節點對于高維特征參量的承載能力。一般來說,為使機器視覺技術得到充分發揮,在選擇標定節點時,應注重對其中所承載的高維特征參量進行統計,盡可能將參量數值相近的節點歸為一類,且一類像素節點的圖像參數水平也必須保持一致[7-8]。設ε表示所選像素點的位置系數,xε、yε、zε分別表示該像素點坐標在X軸、Y軸、Z軸方向上的數值分量,δx、δy、δz分別表示X軸、Y軸、Z軸方向上像素參量的初始賦值,可將基于機器視覺的圖像參數標定表達式定義為:
為避免所選像素點與視覺坐標系源點重合,在求解圖像參數時,要求系數ε的取值不能等于0。
1.3 線性攝像機模型
線性攝像機模型決定了機器視覺技術的實際作用能力,對于圖像高維特征提取任務而言,獨立線性攝像機模型中所包含的高維特征參量種類越多,主機元件在執行提取指令時所具有的選擇空間也就越大,在此情況下,所獲得的參量提取結果也就越符合實際應用需求[9]。由于圖像高維特征參量的分布狀態并沒有明顯的規律性,所以在建立線性攝像機模型時,還需對既定節點在X軸、Y軸、Z軸三個方向上的數值分量進行綜合考慮。設ex表示圖像高維特征參量在X軸方向上的數值分量,ey表示Y軸方向上的數值分量,ez表示Z軸方向上的數值分量,線性攝像機模型表達式為:
式中,β表示視覺坐標系中的像素特征提取系數,φ表示圖像高維特征在視覺坐標系中的布局系數。在機器視覺技術的約束作用下,只有線性攝像機模型對于圖像高維特征參量的容納能力足夠強,最終所得的圖像特征提取結果才能夠符合實際應用需求[10]。
2 圖像高維特征智能提取
2.1 尺度空間金字塔的構建
尺度空間金字塔是一種行為標準,能夠按照既定順序將待處理圖像特征參量排列起來,從而避免投影向量之間出現相互遮擋的情況,實現對所得向量與真實向量之間長度差值水平的有效控制[11-12]。在圖1 所示的尺度空間金字塔模型中,視覺坐標系的數值容納能力最強,這就表示所有待提取圖像特征參量的定義形式都必須滿足視覺坐標系的劃分標準。
11月5日,國家主席習近平出席首屆中國國際進口博覽會開幕式并發表題為《共建創新包容的開放型世界經濟》的主旨演講,強調:回顧歷史,開放合作是增強國際經貿活力的重要動力;立足當今,開放合作是推動世界經濟穩定復蘇的現實要求;放眼未來,開放合作是促進人類社會不斷進步的時代要求。各國都應該積極推動開放合作,實現共同發展,開創人類更加美好的未來。中國推動更高水平開放的腳步不會停滯,推動建設開放型世界經濟的腳步不會停滯,推動構建人類命運共同體的腳步不會停滯。
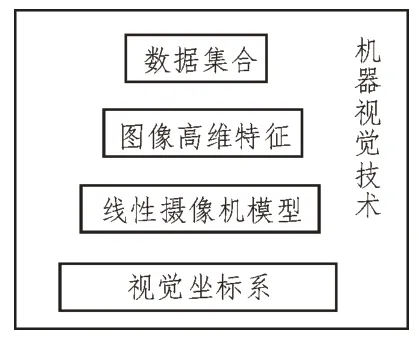
圖1 尺度空間金字塔的結構簡圖
設s表示圖像高維特征參量的縱向排列系數,γ表示橫向排列系數,表示圖像尺度向量均值,ι1、ι2表示兩個不相等的空間標記向量。聯立上述物理量,可將圖像高維特征的尺度空間金字塔表達式定義為:
尺度空間金字塔模型不但可以對圖像高維特征參量進行重排處理,還可以保證待運算數據的收斂性能力。
2.2 高維特征提取
對于圖像高維特征參量而言,由于不同信息所屬的層級類別不同,所以與之相匹配的收斂性條件也就有所不同。簡單來說,收斂特性是處理主機判定圖像高維特征參量所處層級組織的關鍵條件,在機器視覺理論的影響下,收斂性強的圖像高維特征參量在尺度空間金字塔中所對應的存儲位置也就相對較高;反之,若圖像高維特征參量的收斂性能力較弱,就表示其在尺度空間金字塔中所處的存儲位置也就相對較低[13-14]。
設i表示高維特征,r表示低維特征,且兩者的初始取值都等于自然數1,可將圖像高維特征提取模型表示為:
式中,di表示高維存儲向量,dr表示低維存儲向量,f表示圖像特征分辨系數,表示收斂性指征。隨著待處理圖像高維特征參量賦值條件的改變,復雜度智能參量表達式的求解結果也會不斷發生變化。
2.3 復雜度智能參量
復雜度智能參量是一項矢量化指標,可以根據圖像高維特征節點的收斂特性,判斷當前所執行的機器視覺復原機制是否能夠滿足提取特征參量指征的處理需求[15-16]。
在尺度空間金字塔框架結構中,待復原圖像高維特征參量的收斂性能力越強,相鄰參量節點之間的映射關系也就越明顯,在此情況下求解所得的復雜度參量指標也就越能反映出圖像高維特征參量的實際排列形式。設c1,c2,…,cn表示n個不同的圖像高維特征智能參量節點定標值,g表示基于機器視覺復原機制的特征映射系數。在上述物理量的支持下,可將復雜度智能參量表達式定義為:
在復雜度參量的支持下,按照機器視覺復原機制的執行標準,對相關系數指標進行處理,完成圖像高維特征智能提取算法的設計與應用。
3 實例分析
3.1 實驗準備
選擇輪轂結構作為實驗對象,利用圖2 所示3D視覺軟件對其進行復原處理。在復原后圖像中選擇八個連接軸作為監測向量,分別利用實驗組、對照組方法,對監測圖像高維特征進行提取處理。

圖2 3D輪轂的視覺復原圖像
3.2 數據分析
投影向量與真實向量之間的長度差值能夠反映出所選監測方法對于圖像高維特征的提取能力。在不考慮其他干擾條件的情況下,投影向量與真實向量之間的長度差值越小,表示所選監測方法對于圖像高維特征的提取能力越強。
表1 為3D 輪轂連接軸真實向量長度及其投影向量的理想長度數值。
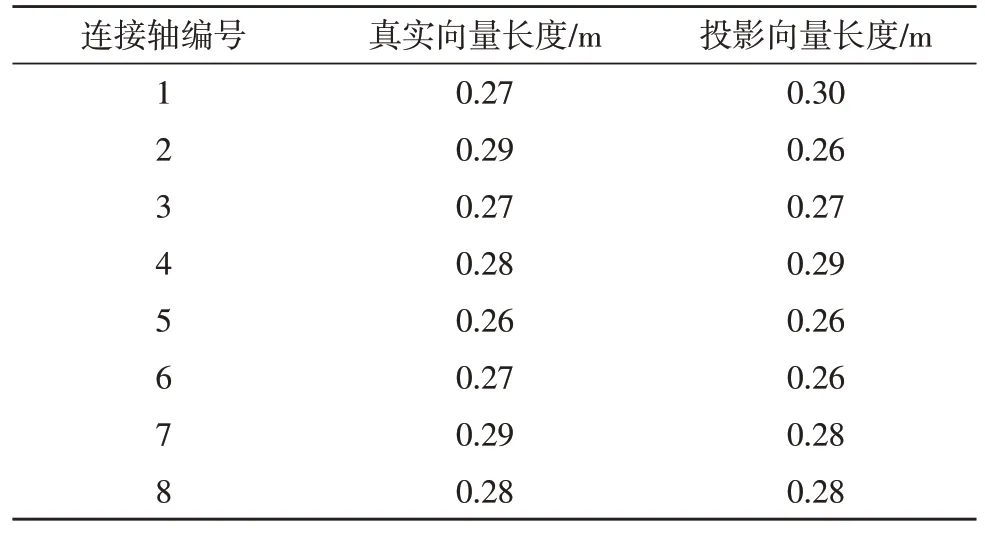
表1 3D輪轂連接軸數值
利用表1 數據,對比在實驗組、對照組提取算法作用下3D 輪轂連接軸投影向量的長度數值,測試結果如圖3 所示。
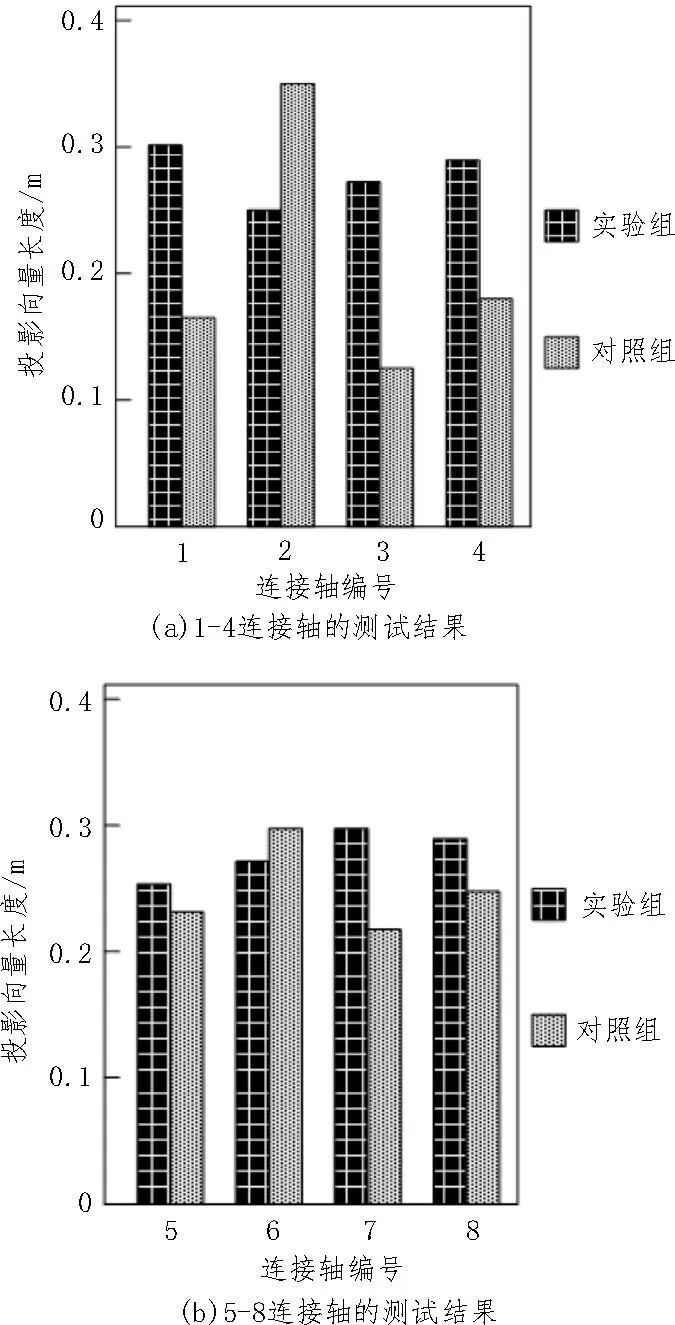
圖3 投影向量的對比測試
根據圖3 的測試結果可知,3D 輪轂連接軸真實向量長度均值為0.276 3 m,該文方法下3D 輪轂連接軸投影向量長度均值也為0.275 0 m,與真實向量長度下相差不大,相比之下,對照組發3D 輪轂連接軸投影向量的長度與真實情況出現較大偏差,說明該文方法應用效果較優。
綜上可知,對于3D 輪轂模型而言,隨著機器視覺技術的應用,所選監測對象投影向量與真實向量之間的差值水平得到了有效控制,與改進SIFT 的提取方法相比,更符合準確提取圖像高維特征的實際應用需求。
4 結束語
在改進SIFT 提取方法的基礎上,新型圖像高維特征智能提取算法按照機器視覺理論的實踐標準,對圖像參數進行標定處理,又根據尺度空間金字塔建立原則,判斷圖像高維特征的收斂特性,從而得到準確的復雜度參量指標計算結果。在實用性方面,隨著機器視覺理論的應用,圖像投影向量與真實向量之間的差值水平可被控制在0.01 m 左右,在準確提取圖像高維特征方面能夠起到較強的促進性作用。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
