基于隨機(jī)模型預(yù)測(cè)控制的衛(wèi)星編隊(duì)重構(gòu)
2023-09-20 11:20:10周旭艷涂海燕
計(jì)算機(jī)仿真 2023年8期
周旭艷,涂海燕,李 彬
(1. 四川大學(xué)電氣工程學(xué)院,四川 成都 610000;2. 四川大學(xué)空天科學(xué)與工程學(xué)院,四川 成都 610000)
1 引言
多衛(wèi)星編隊(duì)飛行是未來許多空間科學(xué)任務(wù)的一項(xiàng)有利技術(shù),因其具有更高的靈活性、更高的可靠性和更低的成本而備受關(guān)注[1]。編隊(duì)重構(gòu)是衛(wèi)星編隊(duì)系統(tǒng)的關(guān)鍵技術(shù)之一,也是其區(qū)別于傳統(tǒng)單顆衛(wèi)星的重要特征。根據(jù)衛(wèi)星編隊(duì)飛行任務(wù)的不同需要,通過重構(gòu)編隊(duì)幾何結(jié)構(gòu),將衛(wèi)星從當(dāng)前編隊(duì)移動(dòng)到期望的編隊(duì)[4]。例如,當(dāng)某一顆衛(wèi)星失敗或編隊(duì)需要更新有效載荷時(shí),可以通過編隊(duì)重構(gòu)來補(bǔ)充新的衛(wèi)星。因此,對(duì)編隊(duì)衛(wèi)星重構(gòu)控制的研究對(duì)于衛(wèi)星編隊(duì)飛行的實(shí)際應(yīng)用具有重要意義。
在編隊(duì)重構(gòu)過程中,控制系統(tǒng)不僅要保證衛(wèi)星準(zhǔn)確地移動(dòng)到預(yù)定位置,且要滿足各種約束條件,如推力約束和避障約束。非線性最優(yōu)控制[5,6],魯棒控制[7],滑模控制[8]和凸優(yōu)化[9]被廣泛應(yīng)用于解決重構(gòu)問題。文獻(xiàn)[10,11]應(yīng)用最優(yōu)控制理論和排列組合原理,在深空探測(cè)中進(jìn)行了衛(wèi)星編隊(duì)重構(gòu)研究。文獻(xiàn)[12]以燃料消耗量和過渡時(shí)間為性能指標(biāo),利用凸優(yōu)化理論設(shè)計(jì)編隊(duì)重構(gòu)軌道過渡策略。在文獻(xiàn)[13]中,將狀態(tài)相關(guān)Riccati方程(SDRE)技術(shù)應(yīng)用于編隊(duì)重構(gòu)與維護(hù)問題的非線性控制器設(shè)計(jì)中。文獻(xiàn)[14]提出了一種基于線性矩陣不等式(LMI)的衛(wèi)星編隊(duì)重構(gòu)動(dòng)態(tài)二次最優(yōu)(DQO)輸出反饋控制器。然而,衛(wèi)星編隊(duì)重構(gòu)過程中存在推力、避障等諸多約束條件,可能導(dǎo)致實(shí)際系統(tǒng)的控制性能不佳,上述文獻(xiàn)中均未考慮約束條件。
模型預(yù)測(cè)控制(Model predictive control, MPC)是近年來在航天航空領(lǐng)域廣泛應(yīng)用的一種反饋控制策略,它既能處理線性和非線性目標(biāo),又能考慮穩(wěn)定性、性能優(yōu)化有約束等不同的要求[2,15-26]。其機(jī)理是在考慮系統(tǒng)動(dòng)力學(xué)、目標(biāo)函數(shù)和約束條件的情況下,通過在每個(gè)采樣時(shí)刻反復(fù)求解一個(gè)在線優(yōu)化問題,得到最優(yōu)的控制行為。文獻(xiàn)[2]提出了一種具有推力約束的衛(wèi)星編隊(duì)重構(gòu)控制的非線性滾動(dòng)控制方案。衛(wèi)星編隊(duì)飛行的空間環(huán)境十分復(fù)雜,如太陽風(fēng)影響、推進(jìn)器的不確定性、低軌道大氣阻力等因素都是不確定的,將這些不確定因素建模為隨機(jī)噪聲。雖然滾動(dòng)時(shí)域方法使MPC具有一定的魯棒性,但傳統(tǒng)的MPC并不是針對(duì)系統(tǒng)不確定性而設(shè)計(jì)的[27]。其魯棒穩(wěn)定性的實(shí)現(xiàn)要求外部噪聲足夠小或者狀態(tài)約束不存在,因此不能滿足一般不確定系統(tǒng)控制的要求[16]。
為了系統(tǒng)地解決上述問題,本文提出了一種帶狀態(tài)反饋的隨機(jī)模型預(yù)測(cè)控制(SMPC)算法來解決衛(wèi)星編隊(duì)重構(gòu)問題中的擾動(dòng)和系統(tǒng)不確定性[28]。SMPC利用了噪聲的隨機(jī)特性和統(tǒng)計(jì)特性并且能處理多約束類型,通常取懲罰函數(shù)的最小期望值,而用到的隨機(jī)特性通常是噪聲的期望和協(xié)方差[29]。SMPC一般考慮機(jī)會(huì)約束(又稱概率約束)[30,31],機(jī)會(huì)約束利用系統(tǒng)不確定性的隨機(jī)性特征,允許約束在一定程度上被違反,從而達(dá)到更好的控制性能。然后利用確定性等價(jià)式處理該類隨機(jī)MPC問題,確定性等價(jià)式方法的原理是:一是利用確定性等價(jià)式將機(jī)會(huì)約束轉(zhuǎn)化為確定約束,如當(dāng)隨機(jī)噪聲的密度分布不可知時(shí),利用切比雪夫不等式將機(jī)會(huì)約束確定化[32],當(dāng)隨機(jī)噪聲的密度分布可知時(shí),利用累積概率函數(shù)的反函數(shù)將機(jī)會(huì)約束確定化[33];二是將目標(biāo)函數(shù)利用狀態(tài)的期望和協(xié)方差迭代式直接表示為確定形式。因此,隨機(jī)MPC就轉(zhuǎn)化成了確定MPC問題。
本文在衛(wèi)星編隊(duì)重構(gòu)過程中,考慮了燃油經(jīng)濟(jì)性,且考慮了編隊(duì)衛(wèi)星隨機(jī)擾動(dòng)和各種約束條件的影響,比如推力大小約束和避障約束。與標(biāo)準(zhǔn)的MPC相比,SMPC由于較弱的保守性,消耗燃料更少,且能更快的達(dá)到編隊(duì)重構(gòu)隊(duì)形。
2 問題描述
2.1 衛(wèi)星相對(duì)運(yùn)動(dòng)動(dòng)力學(xué)
假定主軌道為圓軌道或近圓軌道,用LVLH框架中的一組線性時(shí)不變方程描述衛(wèi)星相對(duì)運(yùn)動(dòng)動(dòng)力學(xué)[34]

(1)

(2)

(3)



(4)

(5)

(6)


(7)
其中
系統(tǒng)(7)是可控的但是不穩(wěn)定,將連續(xù)系統(tǒng)離散,設(shè)置采樣時(shí)間Ts,那么離散化系統(tǒng)表示如下
x(t+1)=Ax(t)+Bu(t)
(8)
其中
A=eAdTs=

其中,Θ=sin(ω0Ts),Ξ=cos(ω0Ts)。
2.2 約束
在實(shí)際工程應(yīng)用中,衛(wèi)星的推力是有界的,因此假定衛(wèi)星的控制輸入是連續(xù)有限推力,其振幅僅限于:
(9)
設(shè)置邊界條件約束為每顆衛(wèi)星在重構(gòu)過程中的初始和最終狀態(tài)的數(shù)值約束:
x(0)=xinitial
x(T)=xfinal
(10)
其中,xinitial,xfinal分別是衛(wèi)星的初始和最終狀態(tài)。


(11)
衛(wèi)星不能從球體障礙物中穿過,只能從其周圍繞過,則任意一顆衛(wèi)星如果能避開障礙物需要滿足如下約束

(12)


圖1 障礙物線性化方法
fc(xt+Δx,yt+Δy,zt+Δz)=fc(xt,yt,zt)+

(13)
其中
可簡(jiǎn)化上述線性約束為
Adbsxi(t)≤bdbs
(14)

所以,編隊(duì)飛行中的所有衛(wèi)星在滿足式(14)的約束下都可以實(shí)現(xiàn)避障。
2.3 MPC編隊(duì)重構(gòu)問題模型
在編隊(duì)衛(wèi)星動(dòng)態(tài)重構(gòu)過程中,必須保證衛(wèi)星能夠滿足邊界條件約束、控制輸入約束和避障約束,并且能克服太空中的隨機(jī)擾動(dòng)。為了提高衛(wèi)星的使用壽命,必須充分考慮到燃料消耗問題。因此,為了提高控制精度,降低編隊(duì)成本,將衛(wèi)星實(shí)際狀態(tài)和期望狀態(tài)之間的誤差和能量消耗作為衛(wèi)星編隊(duì)重構(gòu)的性能指標(biāo)即懲罰函數(shù),則MPC編隊(duì)重構(gòu)問題模型如下

-umax≤ui≤umax
Adbsxi(t)≤bdbs
x(0)=xinitial
x(T)=xfinal

3 SMPC 算法
傳統(tǒng)的MPC無法滿足一般情況下不確定性系統(tǒng)控制的需求。在實(shí)際的衛(wèi)星編隊(duì)重構(gòu)系統(tǒng)中,需考慮各種各樣的干擾源以及系統(tǒng)不確定性,將編隊(duì)重構(gòu)問題表示為一個(gè)隨機(jī)規(guī)劃問題。則系統(tǒng)(8)可寫為如下隨機(jī)模型
xt+1=Axt+But+Gwt
(15)
定義xt,ut,wt如下:
將上式寫為更緊湊的形式則有[37]
Xt+1=Gxxxt+GxuUt+GxwWt
(16)
其中
3.1 狀態(tài)反饋
令反饋控制律[31]
(17)
則

(18)
其中
在假設(shè)的狀態(tài)反饋下,狀態(tài)的平均值為

(19)
3.2 目標(biāo)函數(shù)
在SMPC算法中,通常取的是懲罰函數(shù)的最小期望值[16]。
(20)


(21)
δUt=K(Gxxδxt+GxwWt)
(22)
可得
δXt=(GxuKGxu+Gxw)δxt+(GxxKGxw+Gxw)Wt
(23)



(24)

(25)
則有


(26)

設(shè)置

則目標(biāo)函數(shù)(20)可轉(zhuǎn)化為如下確定性形式

3.3 機(jī)會(huì)約束
本文考慮機(jī)會(huì)約束,機(jī)會(huì)約束允許在一定的置信區(qū)間內(nèi)違反硬約束,從而使約束軟化獲得更好的控制效果。則控制輸入約束(9)可改寫成以下聯(lián)合機(jī)會(huì)約束的形式[38]

(27)
其中,k=1,2,…,N-1i=1,2,Pr{ψ}代表Ψ的概率,h∈u、umax∈是常向量,表示實(shí)數(shù)集,ξ∈(0,1)是限制違反約束的概率。利用布爾不等式來確定違反聯(lián)合機(jī)會(huì)約束的概率,則有

(28)
則聯(lián)合機(jī)會(huì)約束可用以下兩個(gè)單個(gè)機(jī)會(huì)約束代替

(29)


(30)
顯然式(30)、式(31)是非凸的,不方便計(jì)算,必須將其轉(zhuǎn)化為凸的形式。文獻(xiàn)[31]中描述了一種利用切比雪夫不等式處理機(jī)會(huì)約束的方法,將其進(jìn)行了運(yùn)用,從而將(29)(30)處理為如下形式

(31)

(32)
其中κ∈[0,1]是附加的設(shè)計(jì)參數(shù),

=E(K(Gxxδxt+Gxwwt)(Gxxδxt+Gxwwt)TKT)
=KMKT
則SMPC編隊(duì)重構(gòu)問題模型如下
s.t.:Xt+1=Gxxxt+GxuUt+GxwWt
x(0)=xinitial
x(T)=xfinal
4 仿真結(jié)果
采用MATLAB2018b版來進(jìn)行了仿真,并使用CVX工具箱對(duì)控制問題進(jìn)行了優(yōu)化,CVX是MATLAB中求解凸優(yōu)化問題的工具箱。
參考模型由一個(gè)圓形軌道上的三顆衛(wèi)星組成,編隊(duì)重構(gòu)任務(wù)是編隊(duì)衛(wèi)星成員從一字形轉(zhuǎn)換為等腰三角形。將軌道高度設(shè)置為850km,則衛(wèi)星角速度n=0.0255rad/s,控制輸入-20≤u≤20,預(yù)測(cè)時(shí)域N=10。權(quán)重矩陣Q=diag(103103103102102102),R=2×103I3。障礙物中心坐標(biāo)為(-30,37,40),半徑為10。利用MATLAB進(jìn)行了800次蒙特卡洛仿真。三顆衛(wèi)星的初始和期望狀態(tài)設(shè)置見表1。

表1 編隊(duì)衛(wèi)星成員的初始狀態(tài)與期望狀態(tài)
假設(shè)障礙物設(shè)定為球狀,圖2和圖3分別是考慮避障約束設(shè)計(jì)下MPC算法和SMPC算法下編隊(duì)衛(wèi)星成員的最優(yōu)三維軌跡,圖6和圖7是考慮避障約束時(shí)編隊(duì)衛(wèi)星成員最優(yōu)軌跡的三維圖,結(jié)果表明,在式(33)的約束下,所有編隊(duì)衛(wèi)星成員都能夠避開障礙物。SMPC較MPC弱保守性,需要繞更遠(yuǎn)的距離躲開障礙物,如圖2及圖6中的Sat2,這就使得衛(wèi)星走更遠(yuǎn)的路程,消耗更多燃料,而SMPC在距離障礙物安全距離范圍內(nèi)盡量軌跡最短。圖4和圖5分別是不考慮避障約束設(shè)計(jì)下MPC算法和SMPC算法下編隊(duì)衛(wèi)星成員最優(yōu)二維軌跡,由圖可得,編隊(duì)衛(wèi)星成員由于沒有避障約束撞上障礙物。

圖2 帶避障約束的MPC三維最優(yōu)軌跡

圖3 帶避障約束的SMPC三維最優(yōu)軌跡

圖4 無避障約束的MPC三維最優(yōu)軌跡

圖5 無避障約束的SMPC三維最優(yōu)軌跡

圖6 帶避障約束的MPC二維最優(yōu)軌跡

圖7 帶避障約束的SMPC三維最優(yōu)軌跡
圖8和圖9分別是兩種算法下任意兩兩衛(wèi)星之間的距離,由圖8可得,在MPC算法下,編隊(duì)衛(wèi)星成員在40s完成從一字形轉(zhuǎn)換為等腰三角形的編隊(duì)重構(gòu)任務(wù);由圖9可得,SMPC算法下編隊(duì)衛(wèi)星成員在25s時(shí)就已完成編隊(duì)重構(gòu)任務(wù),結(jié)果表明SMPC算法完成編隊(duì)重構(gòu)任務(wù)的速度比標(biāo)準(zhǔn)MPC快。

圖8 MPC下兩兩衛(wèi)星之間距離

圖9 SMPC下兩兩衛(wèi)星之間距離
圖10和圖11分別是兩種算法下編隊(duì)衛(wèi)星成員在(x,y,z)三個(gè)方向上控制輸入,結(jié)果表明SMPC在給定概率下可以違反約束,可以使控制系統(tǒng)得到更好的控制性能,燃油更少且在避障時(shí)軌跡更優(yōu),而MPC算法則是嚴(yán)格遵守約束。表2是兩種算法下編隊(duì)衛(wèi)星成員的的燃料消耗結(jié)果。


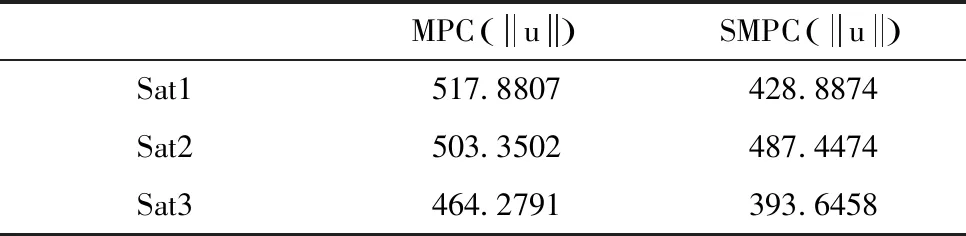
表2 編隊(duì)衛(wèi)星成員燃料消耗
5 結(jié)論
本文主要研究了存在隨機(jī)擾動(dòng)、推力約束、避障約束等情況下的衛(wèi)星編隊(duì)重構(gòu)控制問題,基于具有外部擾動(dòng)和各種約束條件的Clohessy-Wiltshire方程,提出了一種帶有狀態(tài)反饋的隨機(jī)模型預(yù)測(cè)控制器。利用確定性等價(jià)式將隨機(jī)MPC問題轉(zhuǎn)化為確定性MPC問題,并與標(biāo)準(zhǔn)的MPC算法進(jìn)行了比較。仿真結(jié)果表明,SMPC較MPC算法具有更好的控制性能,不僅能處理各種約束,而且具有處理系統(tǒng)不確定性干擾的能力。由于所提出的SMPC算法在設(shè)計(jì)中考慮了擾動(dòng),而基于MPC的方法在設(shè)計(jì)中不考慮擾動(dòng)。因此,SMPC較MPC消耗更少的燃料,且SMPC算法能夠更快的完成編隊(duì)重構(gòu)目標(biāo)。此外,本文還考慮了障礙物模型的設(shè)計(jì),在避障約束下,編隊(duì)衛(wèi)星成員都能避開障礙物,這對(duì)工程實(shí)際具有重要的意義。
