IF-KELM模型在混凝土拱壩變形預(yù)測(cè)中的應(yīng)用
2023-09-23 13:56:08姜鵬輝齊慧君李同春
水力發(fā)電 2023年9期
關(guān)鍵詞:模型
姜鵬輝,齊慧君,李同春,2
(1.河海大學(xué)水利水電學(xué)院,江蘇 南京 210024;2.水安全與水科學(xué)協(xié)同創(chuàng)新平臺(tái),江蘇 南京 210024)
0 引 言
大壩安全控制的主要目的是通過(guò)保持其功能性和結(jié)構(gòu)性完整來(lái)保證大壩的功能,變形觀測(cè)是大壩安全控制不可缺少的組成部分[1]。對(duì)大壩的健康狀況進(jìn)行分析和評(píng)價(jià),可以利用大壩監(jiān)測(cè)數(shù)據(jù)建立合理的大壩安全監(jiān)測(cè)模型。目前,大壩位移預(yù)測(cè)模型采用較多的有BP神經(jīng)網(wǎng)絡(luò)建模方法、灰色建模方法、支持向量機(jī)模型[2-4]等。核極限學(xué)習(xí)機(jī)具有較強(qiáng)的非線性映射能力,適用于混凝土拱壩的隨機(jī)荷載和強(qiáng)非線性變形問(wèn)題的分析模型。大壩監(jiān)測(cè)資料中可能存在一些異常測(cè)值,這些異常測(cè)值對(duì)大壩結(jié)構(gòu)性態(tài)評(píng)價(jià)產(chǎn)生較大影響,進(jìn)而阻礙大壩的正常運(yùn)行,必須進(jìn)行判斷和處理。張海龍等[5]通過(guò)小波變換提取監(jiān)測(cè)數(shù)據(jù)的趨勢(shì)項(xiàng),然后采用孤立森林算法對(duì)扣除趨勢(shì)項(xiàng)的剩余量進(jìn)行異常值識(shí)別。鑒于此,本文提出孤立森林-核極限學(xué)習(xí)機(jī)(IF-KELM)回歸的混凝土拱壩位移預(yù)測(cè)模型。該模型基于孤立森林計(jì)算異常分?jǐn)?shù),利用核極限學(xué)習(xí)機(jī)回歸預(yù)測(cè),由粒子群算法尋優(yōu)模型參數(shù)。最后通過(guò)某混凝土拱壩真實(shí)監(jiān)測(cè)數(shù)據(jù)進(jìn)行了仿真驗(yàn)證,結(jié)果表明,所提出的IF-KELM混凝土壩位移預(yù)測(cè)模型能夠準(zhǔn)確地剔除異常監(jiān)測(cè)數(shù)據(jù),并且具有預(yù)測(cè)結(jié)果精確可靠,模型計(jì)算簡(jiǎn)單的優(yōu)點(diǎn),可以為混凝土壩運(yùn)行性態(tài)估計(jì)、健康監(jiān)測(cè)等提供更加充分的輔助依據(jù)研究方法。
1 基本原理
1.1 位移監(jiān)控指標(biāo)擬定
混凝土拱壩位移主要受水壓、溫度及時(shí)效等環(huán)境因素的影響,位移計(jì)算公式為
yD=yh+yT+yt
(1)
式中,yD為大壩的徑向位移,m;yh為靜水壓引起的位移響應(yīng),m;yT為溫度變化引起的位移響應(yīng),m;yt為不可逆的時(shí)間效應(yīng),m。
靜水壓力的影響通常表示為基于以下力學(xué)分析的多項(xiàng)式函數(shù),即
yh=a1h+a2h2+a3h3+a4h4
(2)
式中,h為上游水深,m;a1、a2、a3、a4為系數(shù)。
溫度變化的引起的位移響應(yīng)可以計(jì)算為諧波正弦函數(shù)的組合,即
yT=b1sin(s)+b2cos(s)+b3sin(2s)+b4cos(2s)
(3)
式中,b1、b2、b3、b4為系數(shù);s=2πj/365.25,j為從年初(1月1日)到觀察日的天數(shù),或從監(jiān)測(cè)開(kāi)始日期到響應(yīng)觀察日的天數(shù)(即為t),d。
大壩隨時(shí)間變化的不可逆變形主要與蠕變有關(guān),蠕變隨時(shí)間呈漸近變化。不可逆變形成分的演化是潛在結(jié)構(gòu)紊亂的指標(biāo)。時(shí)間效應(yīng)變形通常在初始蓄水期間迅速發(fā)展,并隨時(shí)間趨于穩(wěn)定。因此,通常使用如下公式進(jìn)行描述:
yt=c1θ+c2lnθ+c3(1-e-θ)+c4θ/(θ+1)
(4)
式中,θ=t/100,t為分析開(kāi)始后的天數(shù),d;c1、c2、c3、c4為系數(shù)。
位移監(jiān)控的指標(biāo)集S可以表示為
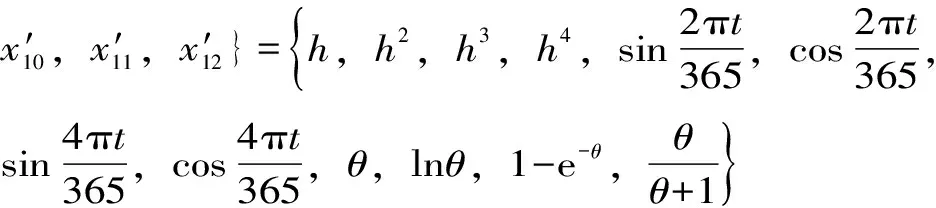
(5)
1.2 孤立森林(IF)算法
孤立森林(iForest)算法是一種具有綜合學(xué)習(xí)能力的無(wú)監(jiān)督異常值檢測(cè)算法,由一系列隨機(jī)構(gòu)建的孤立樹(shù)(iTrees)組成。在大壩安全監(jiān)測(cè)數(shù)據(jù)資料中,異常值檢測(cè)值的占比很小,采用分類算法有效識(shí)別異常測(cè)值的難度很大,而且計(jì)算代價(jià)也很高。與其他的異常檢測(cè)算法相比,例如局部異常因子算法和隨機(jī)森林算法,需要基于距離或者密度來(lái)計(jì)算離群值,該算法只需要較小的子采樣大小即可實(shí)現(xiàn)高效的檢測(cè)性能,大大提高了計(jì)算效率。
孤立森林算法的具體過(guò)程為:首先創(chuàng)建孤立樹(shù),給定處理過(guò)的異常監(jiān)測(cè)數(shù)據(jù)集,隨機(jī)選擇部分樣本形成訓(xùn)練空間,根據(jù)特征和分區(qū)值,不斷分割訓(xùn)練空間,直到滿足子樣本空間已不可分割或達(dá)到規(guī)定切割深度的條件。循環(huán)上述過(guò)程以構(gòu)建t個(gè)孤立的樹(shù),將監(jiān)測(cè)數(shù)據(jù)集中的測(cè)試空間經(jīng)過(guò)訓(xùn)練的隔離樹(shù)中進(jìn)行數(shù)據(jù)評(píng)估,并根據(jù)采樣點(diǎn)的異常分?jǐn)?shù)識(shí)別其中的異常值。
引入路徑長(zhǎng)度的定義為
h(x)=e+c(T)
(6)
式中,e為樣本x從樹(shù)的根節(jié)點(diǎn)到葉節(jié)點(diǎn)的過(guò)程中經(jīng)歷的邊的個(gè)數(shù);T為和樣本x同在一個(gè)葉子結(jié)點(diǎn)樣本的個(gè)數(shù);c(T)可以看作一個(gè)修正值,表示T個(gè)樣本構(gòu)建一個(gè)二叉樹(shù)的平均路徑長(zhǎng)度。c(n)計(jì)算公式為
(7)
式中,H(k)為調(diào)函數(shù)。
采樣點(diǎn)的異常分?jǐn)?shù)s被定義為
(8)
采樣點(diǎn)異常識(shí)別的準(zhǔn)則為:①當(dāng)E(h(x))→c(n)時(shí),s→0.5,不能判斷查詢數(shù)據(jù)x是否為異常;②當(dāng)E(h(x))→0時(shí),s→1,被識(shí)別為異常點(diǎn);③當(dāng)E(h(x))→n-1時(shí),s→0,被識(shí)別正常點(diǎn)。
由式(5)可知,輸入因子集共有12個(gè)輸入變量,而變量類型可分為水位分量、溫度分量和時(shí)效分量。隨著維度的增加,數(shù)據(jù)空間的大小(體積)會(huì)以指數(shù)級(jí)別增長(zhǎng),給異常檢測(cè)帶來(lái)了挑戰(zhàn)。本文構(gòu)建混凝土拱壩水平位移時(shí)間序列的異常檢測(cè)數(shù)據(jù)集,數(shù)據(jù)集中的效應(yīng)量選取x′1、x′7和x′9分別代表水位、溫度和時(shí)效分量,響應(yīng)變量選取大壩水平位移實(shí)際監(jiān)測(cè)值。減少異常檢測(cè)數(shù)據(jù)集的維度,將大大節(jié)省計(jì)算成本,合理效應(yīng)量的選取,也保證了孤立森林算法計(jì)算異常分?jǐn)?shù)的可靠性。
根據(jù)異常分?jǐn)?shù)的大小,設(shè)置合適的異常閾值σ來(lái)進(jìn)行剔除,既保證對(duì)異常樣本的精準(zhǔn)剔除,又避免關(guān)鍵信息的損失。IF異常檢測(cè)性能受σ這個(gè)重要參數(shù)的影響。
1.3 核極限學(xué)習(xí)機(jī)(KELM)算法
ELM是一個(gè)單隱藏層前饋神經(jīng)網(wǎng)絡(luò)[6]。與經(jīng)典的人工神經(jīng)網(wǎng)絡(luò)相比,它只包含3個(gè)組件:輸入層、單個(gè)隱藏層和輸出層。給定一對(duì)輸入/輸出數(shù)據(jù)樣本(xi,yi),經(jīng)典ELM的簡(jiǎn)化方程式為
(9)
式中,βi為將隱藏神經(jīng)元連接到輸出神經(jīng)元的權(quán)重向量;h(xi)為映射函數(shù)。
人工神經(jīng)網(wǎng)絡(luò)能模擬從輸入到輸出之間的非線性結(jié)構(gòu)。相對(duì)于人工神經(jīng)網(wǎng)絡(luò),核極限學(xué)習(xí)模型具有更好的非線性擬合能力與泛化性能,能很好地?cái)M合出水位分量、溫度分量、時(shí)效分量與大壩水平位移的關(guān)系。
為增加模型的穩(wěn)定性,在對(duì)β的求解中將引入一個(gè)正則化系數(shù)C,相應(yīng)的目標(biāo)函數(shù)為
(10)
式中,ei為訓(xùn)練誤差。此時(shí)β被計(jì)算為
(11)
式中,Y為輸出目標(biāo)向量;H的表達(dá)式為
(12)
得到ELM的輸出函數(shù)表達(dá)式為
(13)
對(duì)于實(shí)際工程資料來(lái)說(shuō),很難得到映射函數(shù)精確的顯式表達(dá)式,所以可以通過(guò)構(gòu)造隱式映射進(jìn)行替代,即構(gòu)造核矩陣,則有
ΩELM=HHT
(14)
ΩELMi,j=h(xi)h(xj)=K(xi,xj)
(15)
式中,ΩELM為核矩陣;K(xi,xj)為核函數(shù)。
圖1為KELM的網(wǎng)絡(luò)結(jié)構(gòu)。

圖1 KELM網(wǎng)絡(luò)結(jié)構(gòu)
用核矩陣代替映射表達(dá)式,式(13)可變換為
(16)
KELM的核函數(shù)通常采用Gaussian核函數(shù),即
(17)
因此,大壩水平位移的預(yù)測(cè)結(jié)果精度受正則化系數(shù)C與核函數(shù)的參數(shù)γ這兩個(gè)重要參數(shù)的影響。
將IF與KELM結(jié)合將能很好地把握大壩位移預(yù)測(cè)中的異常信息情況,生成大壩位移預(yù)測(cè)結(jié)果。
1.4 粒子群(PSO)算法
由于異常閾值、正則化系數(shù)、核函數(shù)的參數(shù)是影響IF-KELM擬合精度的關(guān)鍵參數(shù),為了避免參數(shù)估計(jì)帶來(lái)的偏差,因此采用粒子群(PSO)同時(shí)優(yōu)化σ、C和γ這3個(gè)參數(shù),實(shí)現(xiàn)對(duì)混凝土拱壩水平位移的精準(zhǔn)預(yù)測(cè)。
粒子群優(yōu)化的一般思想是基于鳥(niǎo)群或魚(yú)群的移動(dòng)方式[7]。在這個(gè)算法中,種群被稱為一個(gè)群體,每個(gè)點(diǎn)都是一個(gè)粒子。這些群體代表了可能的解決方案。粒子在目標(biāo)函數(shù)的搜索空間中隨機(jī)初始化。初始化后,每個(gè)粒子在連續(xù)迭代期間在其自己的歷史最佳位置(即pbest)、群體的最佳位置(即gbest)和隨機(jī)搜索位置之間做出折中。在PSO中,每個(gè)粒子都與2個(gè)屬性(速度向量v和位置向量x)相關(guān)聯(lián),并且它在搜索空間中移動(dòng)的速度同時(shí)根據(jù)粒子的經(jīng)驗(yàn)和粒子同伴的經(jīng)驗(yàn)動(dòng)態(tài)調(diào)整。粒子的速度和位置根據(jù)式(18)和式(19)更新,即
(18)
(19)
式中,ω為慣性權(quán)重;n為迭代次數(shù);c1和c2為學(xué)習(xí)因子;r1和r2為隨機(jī)數(shù)。
2 算例分析
某大壩為混凝土雙曲拱壩,位于瀾滄江流域。最大壩高294.5 m,長(zhǎng)922.74 m,壩體總方量接近900萬(wàn)m3,共由44個(gè)壩段組成。選取該大壩某壩段監(jiān)測(cè)點(diǎn)2012年8月1日~2018年11月27日共計(jì)456組的水平位移數(shù)據(jù)組成的時(shí)間序列進(jìn)行分析。選取2012年8月1日~2017年12月31日共計(jì)390組監(jiān)測(cè)數(shù)據(jù)為訓(xùn)練樣本,2018年1月1日~2018年11月27日共計(jì)66組監(jiān)測(cè)數(shù)據(jù)為測(cè)試樣本。
2.1 數(shù)據(jù)預(yù)處理
為了消除變量量綱的影響,對(duì)數(shù)據(jù)進(jìn)行歸一化,即
(20)
式中,xi和xnorm分別為各變量歸一化前、后的值;xmin和xmax分別為各變量的極小、極大值。
2.2 IF異常值剔除
將歸一化后的異常檢測(cè)數(shù)據(jù)集進(jìn)行整理,結(jié)果如圖2所示。由圖2可知,水位與位移具有較好的負(fù)相關(guān)性,這是由于位移數(shù)據(jù)的方向是以向上游為正方向,同時(shí)位移值的變化相對(duì)于水位也有一定的滯后性,符合實(shí)際規(guī)律;溫度與位移有相似的變化規(guī)律。在水位、溫度和時(shí)效變化不大的情況下,位移發(fā)生了突變,經(jīng)過(guò)一段時(shí)間后回歸正常,存在顯著異常值。
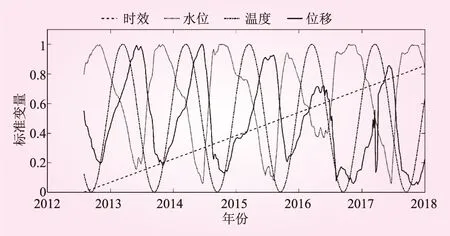
圖2 異常檢測(cè)數(shù)據(jù)
粒子群算法的異常閾值參數(shù)優(yōu)化結(jié)果為0.02,異常值處理的結(jié)果如圖3所示。圖3a表示位移與水位和溫度波函數(shù)值的關(guān)系,可以看出“花形”的異常值為顯著的離群點(diǎn)。圖3b中表示位移值隨時(shí)間的變化情況,可以看出異常值篩選效果優(yōu)越。
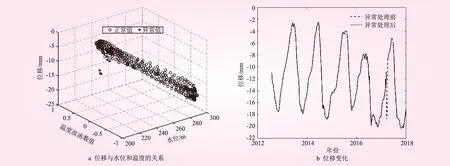
圖3 異常處理結(jié)果
2.3 預(yù)測(cè)結(jié)果及分析
將異常值處理后的數(shù)據(jù)集利用KELM模型進(jìn)行回歸預(yù)測(cè),利用PSO優(yōu)化參數(shù)σ、γ和C,為了保證模型的可靠性,在對(duì)訓(xùn)練集進(jìn)行訓(xùn)練時(shí)采用5折交叉驗(yàn)證以提高模型的穩(wěn)定性。提出的IF-KELM模型是用Python語(yǔ)言來(lái)設(shè)計(jì)和實(shí)現(xiàn)的,程序具體步驟為:
(1)數(shù)據(jù)預(yù)處理。導(dǎo)入監(jiān)測(cè)數(shù)據(jù),進(jìn)行規(guī)定的數(shù)據(jù)處理。
(2)異常值剔除。構(gòu)建異常檢測(cè)數(shù)據(jù)集,計(jì)算每組數(shù)據(jù)的異常分?jǐn)?shù),根據(jù)選定的異常閾值進(jìn)行數(shù)據(jù)剔除。
(3)粒子適應(yīng)度函數(shù)值的計(jì)算。將剔除后的數(shù)據(jù)以實(shí)際位移值和輸入因子集的形式輸入KELM模型,適應(yīng)度函數(shù)值為模型擬合位移值與實(shí)際位移值的均方根誤差,PSO 的目標(biāo)函數(shù)即為最小化適應(yīng)度函數(shù):
(21)
式中,yfit為擬合位移值;yact為實(shí)際位移值。
(4)粒子更新。根據(jù)適應(yīng)度函數(shù)更新粒子的速度和位置。
(5)檢查終止條件。如果達(dá)到符合要求的適應(yīng)度函數(shù)或最大迭代次數(shù),轉(zhuǎn)到第(6)步,否則返回第(2)步。
(6)參數(shù)確定。得到適應(yīng)度函數(shù)最小對(duì)應(yīng)的σ、γ和C參數(shù)。
(7)結(jié)果輸出。根據(jù)最優(yōu)參數(shù),依次進(jìn)行異常值剔除與回歸擬合,得到大壩水平位移預(yù)測(cè)值。
為測(cè)試KELM算法的性能,本文同時(shí)將支持向量回歸機(jī)(SVR)、高斯回歸過(guò)程(GPR)作為對(duì)比算法,分別建立IF-KELM、IF-SVR、IF-GPR預(yù)測(cè)模型。訓(xùn)練階段的擬合精度和測(cè)試階段的預(yù)測(cè)精度如表1所示。由表1可知,IF-KELM模型訓(xùn)練集和測(cè)試集的RMSE分別是0.263 9 mm和1.106 7 mm,MAE分別是0.179 9 mm和0.860 2 mm,遠(yuǎn)小于大壩水平位移的量級(jí),同時(shí)也低于其他2個(gè)模型,而訓(xùn)練集與測(cè)試集的R2也大于另外兩個(gè)模型。結(jié)果表明,預(yù)測(cè)結(jié)果具有較高精確性的同時(shí),也具有更好的整體穩(wěn)定性。
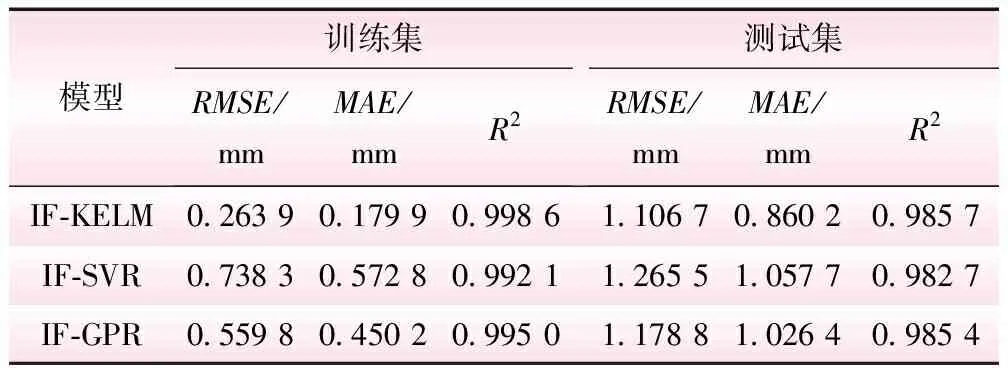
表1 不同預(yù)測(cè)模型的預(yù)測(cè)精度對(duì)比
不同預(yù)測(cè)模型的擬合和預(yù)測(cè)結(jié)果如圖4所示。由圖4可知,IF-KELM模型的擬合過(guò)程線和預(yù)測(cè)過(guò)程線與實(shí)測(cè)過(guò)程線最接近,相應(yīng)取得最優(yōu)參數(shù)的IF-SVR模型和IF-GPR模型雖然都取得了較好的擬合效果,但在圖中的“波峰波谷”處預(yù)測(cè)值與實(shí)測(cè)值偏差較大。根據(jù)結(jié)果,IF-KELM可以有效地評(píng)估和預(yù)測(cè)大壩位移,并且性能優(yōu)于IF-SVR和IF-GPR模型。
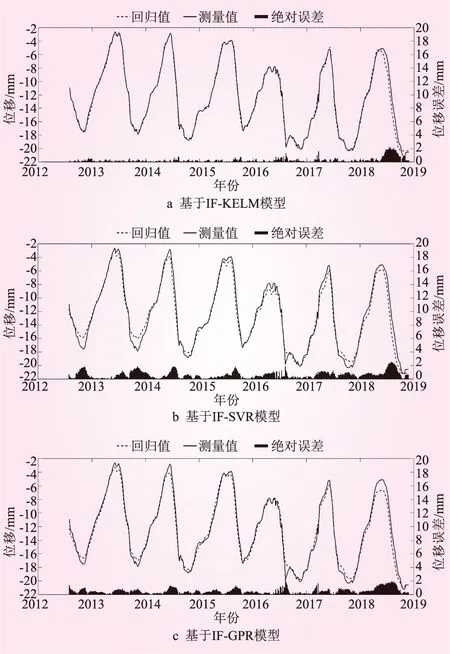
圖4 不同預(yù)測(cè)模型的擬合和預(yù)測(cè)結(jié)果對(duì)比
3 結(jié) 論
為了避免出現(xiàn)維數(shù)災(zāi)害的問(wèn)題,IF算法減少了輸入變量的個(gè)數(shù),在異常值剔除效果好的同時(shí)也大大提高了計(jì)算效率。PSO自動(dòng)參數(shù)尋優(yōu)避免了人工假設(shè)異常閾值的問(wèn)題,提升算法的參數(shù)尋優(yōu)效率,提高算法的泛化性能。與IF-SVR和IF-GPR相比,基于IF-KELM的模型具有更好的捕捉自變量和因變量之間非線性關(guān)系的能力,有高預(yù)測(cè)精度和低誤差報(bào)警。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19