基于補償函數觀測器的無人機吊掛飛行控制
2023-09-25 11:07:26劉肩山唐毅謝志明
現代信息科技 2023年16期
劉肩山 唐毅 謝志明
摘 ?要:無人機吊掛飛行系統是多變量、欠驅動、強耦合的非線性系統,且該系統存在模型偏差和未知擾動,給無人機位置和吊掛飛行減擺控制帶來了困難。文章設計了一種基于補償函數觀測器(CFO)的非線性控制方法。首先,基于拉格朗日方程建立系統的動力學模型。然后,設計了補償函數觀測器來估計未建模動態和擾動,并將估計值反饋給控制器以大幅減弱其給吊掛飛行減擺控制帶來的不利影響。仿真實驗對比了線性自抗擾控制(LADRC)以及線性二次型調節器(LQR)兩種控制方法,結果表明設計的控制器抗擾性更好、魯棒性更強、控制精度更高。
關鍵詞:外界干擾;補償函數觀測器;障礙Lyapunov函數;反步控制器;減擺控制
中圖分類號:TP273.1 ? 文獻標識碼:A ? 文章編號:2096-4706(2023)16-0062-05
Control of Unmanned Aerial Vehicle with a Slung-load Based on
Compensation Function Observer
LIU Jianshan, TANG Yi, XIE Zhiming
(Changsha Aeronautical Vocational and Technical College, Changsha ?410124, China)
Abstract: Unmanned Aerial Vehicle with a slung-load flight system is a multi-variable, underactuated and strong coupling nonlinear system, and the system has model bias and wind disturbance which increase the difficulty of UAV position and anti-swing control of slung-load flight. This paper designs a nonlinear control method based on CFO. Firstly, the system dynamic model is built by using Lagrangian mechanics equation. Then, a CFO is designed to estimate the unmodelled dynamics and disturbances, and the estimated values are feed back to the controller to greatly reduce its adverse effects on the slung-load flight anti-swing control. The simulation experiment compares the two control methods of LADRC and LQR, and results show that the designed controller has better disturbance immunity, stronger robustness and higher control precision.
Keywords: external disturbance; Compensation Function Observer; barrier Lyapunov function; backstepping controller; anti-swing control
0 ?引 ?言
四旋翼無人機吊掛飛行因其具有無須考慮吊掛負載外形影響、不受地理條件限制、效率高、成本低、操作靈活等優點,在軍用和民用的各個領域得到應用,如物資運輸、搶險救災、水質監測取樣、雷區探測掃描等[1,2]。四旋翼吊掛無人機是一個多變量、非線性、欠驅動、強耦合以及時變的系統,在實際飛行中,系統穩定性會受到負載擺動的影響,且存在系統參數變化、外界干擾、模型不精確等問題,使無人機吊掛飛行控制變得復雜。因此,為了擴展其應用范圍,設計具有高抗擾能力的控制器就顯得十分有必要,也成為近年來研究的熱點和難點。
由于吊掛負載并不能給系統增加控制輸入,四旋翼無人機吊掛系統是欠驅動的,對該系統的建模主要使用歐拉—拉格朗日方程[3],該方法基于能量平衡原理,不需要求解吊掛系繩上的作用力。文獻[4,5]在建模過程中考慮了更多的細節,如系繩的彈性、有無張力、以及負載空氣動力學對無人機飛行控制的影響。Lee將無人機吊掛系統控制輸入分解為機體系的垂直分量和水平分量,在水平分量上采用反饋線性化控制[6],不過該方法控制效果取決于系統模型是否精確。文獻[7]針對負載軌跡跟蹤控制,基于反步法設計了Lyapunov函數,證明了閉環系統的漸近穩定性,實際的飛行實驗也驗證了無人機吊掛系統所有狀態的一致有界。文獻[8]采用分層滑模控制方法來解決控制變量耦合問題,并利用吊掛刀鋸擺角信息設計了無人機位置和負載擺角綜合控制器。
無人機吊掛系統需要考慮建模不精確、參數攝動和外擾對飛行控制的影響,為提高系統的動態性能和魯棒性,文獻[9]提出將被控對象存在的耦合、內擾和外擾等直接視為總擾動,設計擴張觀測器(ESO)估計總擾動。文獻[10]提出了補償函數觀測器,通過添加補償函數來抵消未知函數對估計精度的影響,能高精度估計未建模動態和擾動。
本文基于拉格朗日方程建立了四旋翼無人機吊掛系統動力學模型,考慮到強耦合、空氣阻力、未建模動態和風擾等因素對飛行控制的影響,將無人機的位置和負載擺角綜合為一個控制向量,對被控變量進行同頻率控制;設計CFO對擾動和模型偏差進行估計,并將估計值反饋給比例微分控制器,提高了系統的準確性和穩定性;最后,將本文設計的控制算法與基于LADRC和LQR的控制算法進行了比較,結果表明本文設計的控制算法具有更好的控制效果。
1 ?系統模型分析
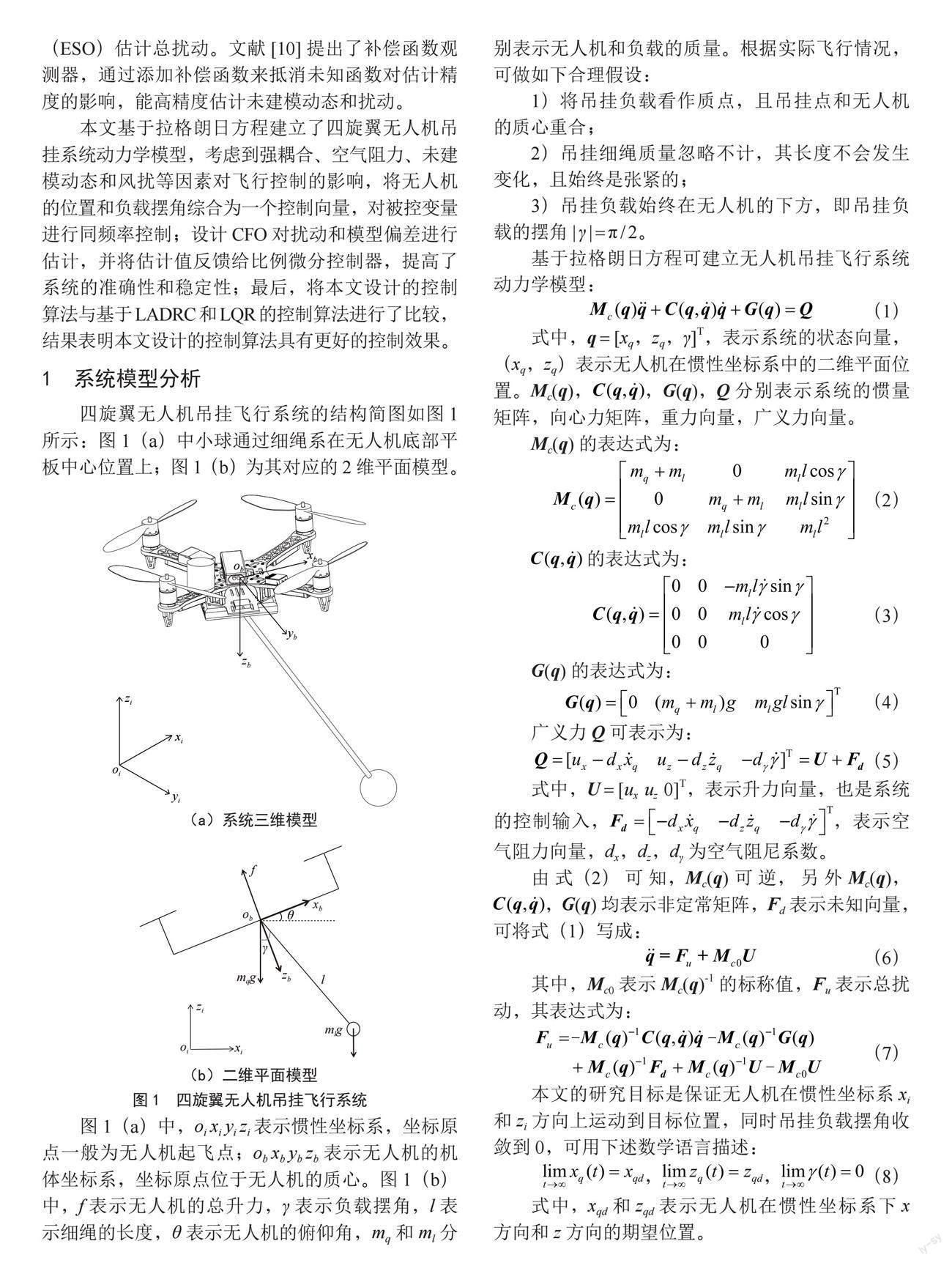
四旋翼無人機吊掛飛行系統的結構簡圖如圖1所示:圖1(a)中小球通過細繩系在無人機底部平板中心位置上;圖1(b)為其對應的2維平面模型。
圖1(a)中,oi xi yi zi 表示慣性坐標系,坐標原點一般為無人機起飛點;ob xb yb zb表示無人機的機體坐標系,坐標原點位于無人機的質心。圖1(b)中,f表示無人機的總升力,γ表示負載擺角,l表示細繩的長度,θ表示無人機的俯仰角,mq和ml分別表示無人機和負載的質量。根據實際飛行情況,可做如下合理假設:
1)將吊掛負載看作質點,且吊掛點和無人機的質心重合;
2)吊掛細繩質量忽略不計,其長度不會發生變化,且始終是張緊的;
3)吊掛負載始終在無人機的下方,即吊掛負載的擺角| γ | = π / 2。
基于拉格朗日方程可建立無人機吊掛飛行系統動力學模型:
(1)
式中,q = [xq,zq,γ]T,表示系統的狀態向量,(xq,zq)表示無人機在慣性坐標系中的二維平面位置。Mc(q),,G(q),Q分別表示系統的慣量矩陣,向心力矩陣,重力向量,廣義力向量。
Mc(q)的表達式為:
(2)
的表達式為:
(3)
G(q)的表達式為:
(4)
廣義力Q可表示為:
(5)
式中,U = [ux uz 0]T,表示升力向量,也是系統的控制輸入,,表示空氣阻力向量,dx,dz,dγ為空氣阻尼系數。
由式(2)可知,Mc(q)可逆,另外Mc(q),,G(q)均表示非定常矩陣,Fd表示未知向量,可將式(1)寫成:
(6)
其中,Mc0表示Mc(q)-1的標稱值,Fu表示總擾
動,其表達式為:
(7)
本文的研究目標是保證無人機在慣性坐標系xi和zi方向上運動到目標位置,同時吊掛負載擺角收斂到0,可用下述數學語言描述:
,,(8)
式中,xqd和zqd表示無人機在慣性坐標系下x方向和z方向的期望位置。
2 ?控制器設計
2.1 ?補償函數觀測器
CFO比ESO多使用了狀態向量的微分信息,且通過對狀態向量誤差及其微分進行積分來補償未知模型函數項Fu的影響。CFO比ESO高兩個型別,為Ⅲ型系統,其精確度和收斂性都要優于ESO。另外,CFO是指數收斂的,在Fu為三階無窮小函數向量的條件下,其擴張狀態向量能以零穩態誤差收斂到Fu。由式(6)可得系統的狀態方程:
(9)
其中,x1 = q,U表示控制輸入向量。由式(9)可得CFO表達式:
(10)
其中, 表示對q的估計值, 表示對總擾動Fu的估計值, 表示誤差矩陣,λ表示濾波參數矩陣,L = [l1,l2]表示增益矩陣,l1,l2,λ均表示三階對角矩陣,其表達式如下:
,,(11)
式中,l1i,l2i,λi(i = x,z,γ)滿足如下特征方程:
s3 + l1i s2 + ( λi l1i + l2i ) s + λi l2i = 0 ? ? ? ?(12)
配置觀測器的極點為s1 = -wi,s2, 3 = -4wi,有l1i = 9wi,l2i = 12wi2,λi = 4 / 3 wi,wi表示通道的帶寬。
2.2 ?控制器設計
通過CFO對系統的觀測,可以得到總擾動估計值 ,結合總擾動主動補償和跟蹤誤差比例微分反饋的控制律設計如下:
(13)
其中,qd = [xqd,zqd,γqd]T表示無人機位置x、位置z和吊掛負載擺角γ的期望值組成的列向量,KP和Kd的表達式如下:
,(14)
式中,ωcx、ωcz和ωcγ分別表示控制器在位置x,位置z和擺角γ通道的帶寬。
3 ?仿真實驗
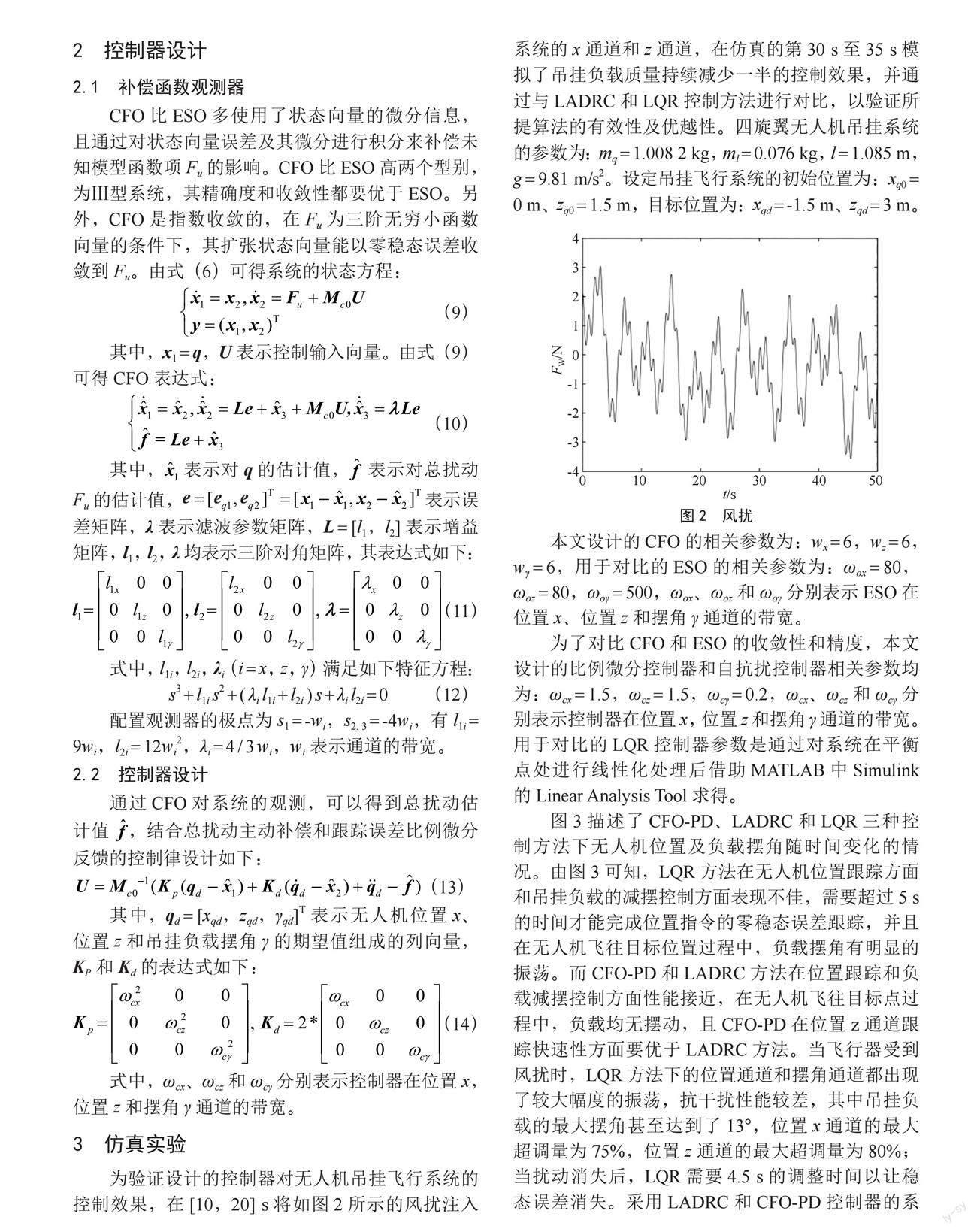
為驗證設計的控制器對無人機吊掛飛行系統的控制效果,在[10,20] s將如圖2所示的風擾注入系統的x通道和z通道,在仿真的第30 s至35 s模擬了吊掛負載質量持續減少一半的控制效果,并通過與LADRC和LQR控制方法進行對比,以驗證所提算法的有效性及優越性。四旋翼無人機吊掛系統的參數為:mq = 1.008 2 kg,ml = 0.076 kg,l = 1.085 m,g = 9.81 m/s2。設定吊掛飛行系統的初始位置為:xq0 = 0 m、zq0 = 1.5 m,目標位置為:xqd = -1.5 m、zqd = 3 m。
本文設計的CFO的相關參數為:wx = 6,wz = 6,wγ = 6,用于對比的ESO的相關參數為:ωox = 80,ωoz = 80,ωoγ = 500,ωox、ωoz和ωoγ分別表示ESO在位置x、位置z和擺角γ通道的帶寬。
為了對比CFO和ESO的收斂性和精度,本文設計的比例微分控制器和自抗擾控制器相關參數均為:ωcx = 1.5,ωcz = 1.5,ωcγ = 0.2,ωcx、ωcz和ωcγ分別表示控制器在位置x,位置z和擺角γ通道的帶寬。用于對比的LQR控制器參數是通過對系統在平衡點處進行線性化處理后借助MATLAB中Simulink的Linear Analysis Tool求得。
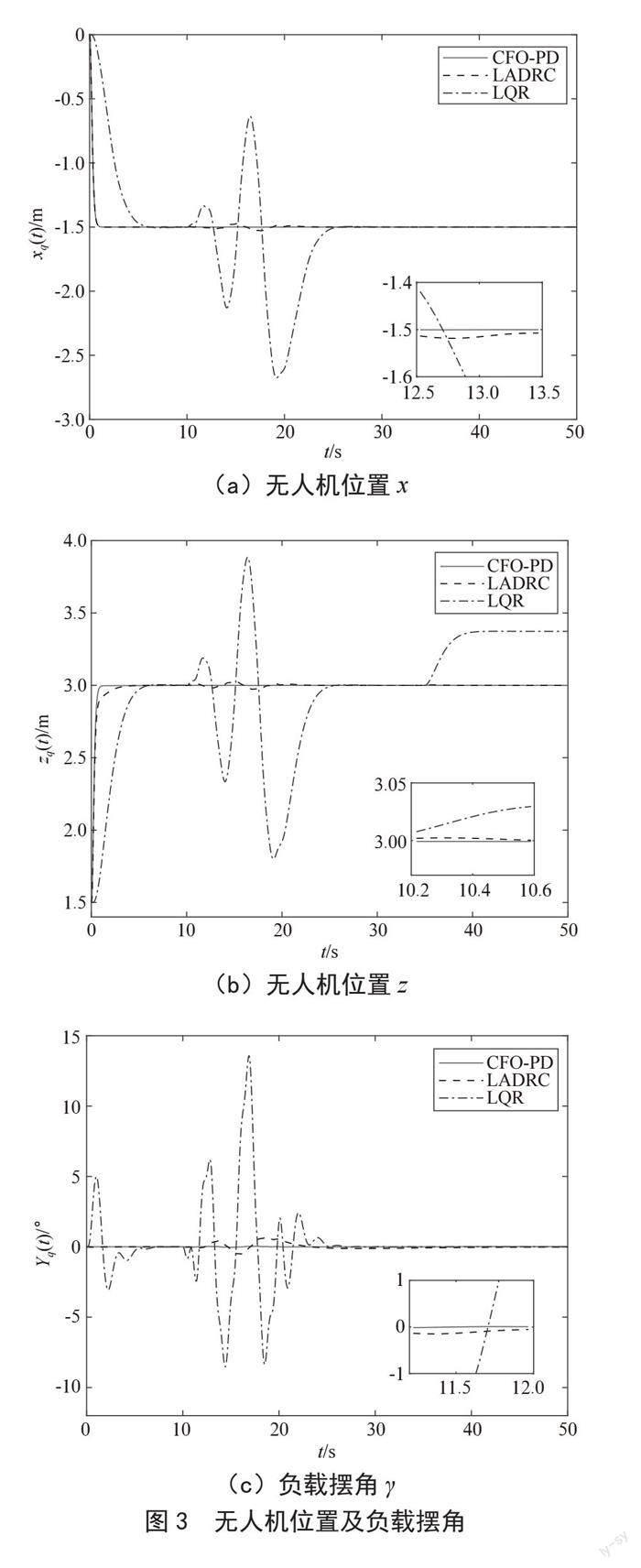
圖3描述了CFO-PD、LADRC和LQR三種控制方法下無人機位置及負載擺角隨時間變化的情況。由圖3可知,LQR方法在無人機位置跟蹤方面和吊掛負載的減擺控制方面表現不佳,需要超過5 s的時間才能完成位置指令的零穩態誤差跟蹤,并且在無人機飛往目標位置過程中,負載擺角有明顯的振蕩。而CFO-PD和LADRC方法在位置跟蹤和負載減擺控制方面性能接近,在無人機飛往目標點過程中,負載均無擺動,且CFO-PD在位置z通道跟蹤快速性方面要優于LADRC方法。當飛行器受到風擾時,LQR方法下的位置通道和擺角通道都出現了較大幅度的振蕩,抗干擾性能較差,其中吊掛負載的最大擺角甚至達到了13°,位置x通道的最大超調量為75%,位置z通道的最大超調量為80%;當擾動消失后,LQR需要4.5 s的調整時間以讓穩態誤差消失。采用LADRC和CFO-PD控制器的系統在受到風擾后,都表現出了良好的抗擾性能,無人機位置和擺角僅出現了很小幅度的波動,且在擾動消失后,很快就恢復到原來的狀態,但是從圖中可以看出,CFO-PD的魯棒性要明顯優于LADRC,位置和吊掛負載擺角幾乎無任何波動,這是因為CFO是Ⅲ型系統,對擾動的估計精度更高。另外,當吊掛負載質量減少時,可以發現LQR方法不能保證位置z的跟蹤,出現了0.4 m的穩態誤差,而CFO-PD和LADRC方法幾乎不受影響。
圖4為三種控制方法下無人機的控制輸入隨時間變化情況,可以發現CFO-PD和LADRC方法均對控制指令在短時間做出了響應,而LQR方法響應較慢,而且控制輸入相比CFO-PD和LADRC小得多。在風擾期間,CFO-PD和LADRC方法下的控制輸入均能很好地根據外部擾動及時做出響應,能跟上風擾的變化,而LQR方法下的控制輸入則有明顯的滯后,且并不能快速跟上風擾的變化。在吊掛負載質量持續減少時,通過圖4(b)中局部放大區域可以看到,CFO-PD方法下的控制輸入響應最為迅速,LADRC次之,LQR則最慢。
綜上,本文提出的CFO-BLF反步控制器能使無人機吊掛飛行系統快速、高精度飛往目標位置,且在飛行過程中能極大抑制吊掛負載的擺動,同時在對抗外部風擾和內擾方面具有極強的魯棒性。
4 ?結 ?論
針對風擾和系統內擾下的無人機吊掛飛行系統減擺控制問題,本文通過對系統動力學模型分析得到系統狀態方程,并設計了基于補償函數觀測器的非線性控制器。補償函數觀測器可以有效估計內擾和外界干擾,并將這些總擾動精確地補償給PD控制器,抑制總擾動對系統帶來的不利影響。仿真實驗表明,本文設計的非線性控制器實現了無人機吊掛飛行系統的精確位置控制和吊掛負載的減擺控制,具有比LADRC和LQR控制器更快的跟蹤速度、更強的魯棒性和更高的跟蹤精度。由于條件和時間有限,本文是從仿真的角度進行研究,下一步的工作將在實際系統中進行試驗驗證。
參考文獻:
[1] 齊俊桐,平原.無人機吊掛飛行控制技術綜述 [J].無人系統技術,2018,1(1):83-90.
[2] 梁曉,胡欲立.四旋翼吊掛運輸系統動態反饋線性化軌跡控制 [J].自動化學報,2020,46(9):1993-2002.
[3] DE ANGELIS E L,GIULIETTI F,PIPELEERS G. Two-time-scale control of a multirotor aircraft for suspended load transportation [J].Aerospace Science and Technology,2019,84:193-203.
[4] SHIRANI B,NAJAFI M,IZADI I. Cooperative load transportation using multiple UAVs [J].Aerospace Science & Technology,2019,84(Jan):158-169.
[5] KOTARU P,WU G,SREENATH K. Dynamics and control of a quadrotor with a payload suspended through an elastic cable [C]//2017 American Control Conference (ACC).Windsor:IEEE,2017:1-4.
[6] LEE T. Geometric control of quadrotor UAVs transporting a cable-suspended rigid body [J].IEEE Transactions on Control Systems Technology,2017,26(1):255-264.
[7] YU G,CABECINHAS D,CUNHA R,et al. Nonlinear backstepping control of a quadrotor-slung load system [J].IEEE/ASME Transactions on Mechatronics,2019,24(5):2304-2315.
[8] 常樂.吊掛刀鋸樹障清理空中機器人控制技術研究 [D].南京:南京航空航天大學,2020.
[9] 高志強.自抗擾控制思想探究 [J].控制理論與應用,2013,30(12):1498-1510.
[10] 齊國元,李闊,王琨.基于補償函數觀測器的四旋翼無人機姿態受限控制 [J].吉林大學學報:工學版,2023,53(3):853-862.
作者簡介:劉肩山(1989—),男,漢族,江西九江人,講師,碩士研究生,研究方向:無人機非線性控制;唐毅(1979—),男,漢族,湖南長沙人,講師,碩士研究生,研究方向:無人機飛控開發;謝志明(1981—),男,漢族,湖南株洲人,講師,碩士研究生,研究方向:無人機應用與系統開發。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34