
基于LSTM的船閘位移預(yù)測(cè)模型研究
2023-09-25 19:11:48丁騰騰
現(xiàn)代信息科技 2023年16期

摘 ?要:船閘在長(zhǎng)期服役過(guò)程中會(huì)因?yàn)闇囟取⑺畨旱纫蛩赜绊懏a(chǎn)生形變,嚴(yán)重危害通航安全。為實(shí)現(xiàn)精準(zhǔn)的船閘位移預(yù)測(cè),構(gòu)建高效的船閘預(yù)測(cè)模型,文章引入深度學(xué)習(xí)方法,基于某大壩船閘的歷史觀測(cè)數(shù)據(jù),利用長(zhǎng)短記憶神經(jīng)網(wǎng)絡(luò)構(gòu)建了船閘位移預(yù)測(cè)模型。結(jié)果顯示文章所提模型最終的預(yù)測(cè)效果MAE達(dá)到了0.008 1 mm,AEmax達(dá)到了0.015 4 mm,RMSE達(dá)到了0.009 9 mm,均遠(yuǎn)優(yōu)于傳統(tǒng)的多元線性回歸方法。說(shuō)明該模型具有良好的預(yù)測(cè)性能,為實(shí)現(xiàn)船閘的安全預(yù)警提供了一種新方法。
關(guān)鍵詞:船閘;LSTM;位移預(yù)測(cè)
中圖分類號(hào):TP183 ? 文獻(xiàn)標(biāo)識(shí)碼:A ? 文章編號(hào):2096-4706(2023)16-0155-04
Research on Ship Lock Displacement Prediction Model Based on LSTM
DING Tengteng
(Pearl River Water Resources Institute of Pearl River Water Conservancy Commission, Guangzhou ?510611, China)
Abstract: The ship locks will be deformed during long-term service due to temperature, water pressure and other factors, which seriously endangers navigation safety. In order to achieve accurate ship lock displacement prediction and build an efficient ship lock prediction model, this paper introduces the Deep Learning method and constructs a ship lock displacement prediction model based on the historical observation data of a dam ship lock using LSTM neural network. The results show that the final prediction effect of MAE reaches 0.008 1 mm, AEmax reaches 0.015 4 mm and RMSE reaches 0.009 9 mm, which are better than the traditional multivariate linear regression method. The model proposed in this paper has good prediction performance and provides a new method to realize the safety warning of ship locks.
Keywords: ship lock; LSTM; displacement prediction
0 ?引 ?言
20世紀(jì)70年代以來(lái),我國(guó)大壩的建設(shè)取得了飛速發(fā)展,先后建成了三峽、小浪底、溪洛渡等多座大壩。然而,在河道上修建的大壩會(huì)截?cái)嗪拥溃韪羯舷掠呜炌āR虼耍恍枰柚l來(lái)通航,實(shí)現(xiàn)大壩的跨越,保證流域航道的貫通。
水利部的《第一次全國(guó)水利普査公報(bào)》[1]顯示:截至2013年,我國(guó)現(xiàn)有船閘高達(dá)27萬(wàn)余座,是世界上船閘數(shù)量最多的國(guó)家之一。如此多數(shù)量的船閘為我國(guó)水路交通網(wǎng)的構(gòu)建和水運(yùn)事業(yè)的發(fā)展做出了巨大的貢獻(xiàn)。可以說(shuō),船閘的安全與穩(wěn)定關(guān)系到船只的安全、航道的通暢以及水運(yùn)的發(fā)展等[2,3]。然而,船閘在長(zhǎng)期服役過(guò)程中,會(huì)因?yàn)樗畨旱淖饔谩囟鹊挠绊憽⒉牧系牧踊纫蛩夭豢杀苊獾陌l(fā)生位移——對(duì)船閘的安全運(yùn)行造成影響[2]。因此,基于環(huán)境因素對(duì)船閘的位移量做出預(yù)測(cè),進(jìn)而對(duì)其安全程度進(jìn)行預(yù)警是提升船閘穩(wěn)定運(yùn)行水平,實(shí)現(xiàn)智能化管理的重要任務(wù)[2,4]。
當(dāng)前,關(guān)于船閘位移預(yù)測(cè)的研究,可以按照研究方法的不同分成兩部分:基于數(shù)值模型和基于統(tǒng)計(jì)回歸的研究。基于數(shù)值模型的研究主要是通過(guò)有限元等算法,從力學(xué)角度預(yù)測(cè)船閘在外部環(huán)境作用下會(huì)出現(xiàn)的位移變化。典型的研究比如:苑敬舜[5]根據(jù)實(shí)際工程資料,基于有限元對(duì)船閘閘首部位進(jìn)行數(shù)值模擬,實(shí)現(xiàn)了閘首的位移預(yù)測(cè)。凌威則利用有限元建立了船閘-巖土-支護(hù)樁耦合數(shù)值分析模型,對(duì)受基坑開(kāi)挖影響的船閘的位移做出預(yù)測(cè)。不過(guò)基于有限元的數(shù)值模擬方法雖然準(zhǔn)確,但其需要大量的力學(xué)參數(shù)——參數(shù)的確定十分困難,而且數(shù)值模擬的速度較慢,難以實(shí)現(xiàn)快速的預(yù)警。基于統(tǒng)計(jì)回歸的方法主要是:找出影響船閘位移的環(huán)境量,根據(jù)環(huán)境量的測(cè)值與船閘位移的變化值,通過(guò)相關(guān)統(tǒng)計(jì)回歸模型(比如:多元線性回歸和機(jī)器學(xué)習(xí)方法)進(jìn)行回歸分析。
本文考慮到船閘的位移是多因素耦合作用的結(jié)果,其位移具有不確定性和非線性的特點(diǎn),引入深度學(xué)習(xí)的方法,將LSTM模型引入船閘位移預(yù)測(cè),基于其強(qiáng)大的數(shù)據(jù)擬合能力、信息選擇記憶能力以及泛化能力,提出基于LSTM算法的船閘位移預(yù)測(cè)模型。本文首先介紹了LSTM的原理和算法架構(gòu);其次基于工程實(shí)測(cè)的溫度、水壓和位移序列數(shù)據(jù),建立了多輸入單輸出的船閘位移模型;然后,將數(shù)據(jù)輸入模型中進(jìn)行訓(xùn)練,并利用訓(xùn)練出的網(wǎng)絡(luò)在驗(yàn)證集上做位移預(yù)測(cè),并與多元線性回歸方法進(jìn)行比較,評(píng)估LSTM算法在船閘位移預(yù)測(cè)方法中的可行性和優(yōu)越性。最終建立基于LSTM的船閘位移預(yù)測(cè)模型。
1 ?LSTM模型介紹
長(zhǎng)短記憶神經(jīng)網(wǎng)絡(luò)(Long Short-Term Memory, LSTM)是一種強(qiáng)大的機(jī)器學(xué)習(xí)算法,其改善了RNN中存在的長(zhǎng)期依賴問(wèn)題,能夠?qū)W習(xí)長(zhǎng)序列的依賴關(guān)系,可作為復(fù)雜的非線性單元用于構(gòu)造更大型深度神經(jīng)網(wǎng)絡(luò),非常適合用于進(jìn)行映射關(guān)系挖掘和時(shí)序預(yù)測(cè)。LSTM由Hochreiter等提出,其整體結(jié)構(gòu)如圖1所示。
通過(guò)將環(huán)境量按照時(shí)序逐步、循環(huán)地輸入到LSTM單元中,而后比較輸出結(jié)果與預(yù)期結(jié)果間的差異,來(lái)實(shí)現(xiàn)單元內(nèi)部參數(shù)的優(yōu)化。不過(guò),不同于傳統(tǒng)RNN的是,LSTM模型內(nèi)部引入了門控機(jī)制,使得LSTM可以實(shí)現(xiàn)長(zhǎng)序列數(shù)據(jù)的學(xué)習(xí),其內(nèi)部的結(jié)構(gòu)如圖2所示。
圖2中:⊙表示操作矩陣中對(duì)應(yīng)的元素相乘,⊕表示矩陣相加;xt表示當(dāng)前序列的輸入數(shù)據(jù),ht-1表示上一個(gè)狀態(tài)傳遞下來(lái)的數(shù)據(jù),兩者拼接得到四個(gè)狀態(tài):z f、zi、zo和z。其中z f、zi、zo表示由拼接向量乘以權(quán)重矩陣之后通過(guò)一個(gè)sigmoid激活函數(shù)轉(zhuǎn)換成0到1之間的數(shù)值,來(lái)作為一種門控狀態(tài),而z則是將結(jié)果通過(guò)一個(gè)tanh激活函數(shù)將轉(zhuǎn)換成-1到1之間的值。ct表示在長(zhǎng)時(shí)間學(xué)習(xí)中,之前狀態(tài)需要被記錄的內(nèi)容:
(1)
(2)
sigmoid和tanh的算式為:
(3)
(4)
LSTM在訓(xùn)練的時(shí)候主要分三個(gè)階段:忘記階段、選擇記憶階段和輸出階段。忘記階段是對(duì)上一個(gè)節(jié)點(diǎn)傳進(jìn)來(lái)的輸入進(jìn)行選擇性忘記,即通過(guò)計(jì)算得到的z f( f表示forget)來(lái)作為忘記門控,來(lái)控制上一個(gè)狀態(tài)的C t-1哪些需要留哪些需要忘。選擇記憶階段則是將這個(gè)階段的輸入有選擇性地進(jìn)行“記憶”。當(dāng)前的輸入內(nèi)容由前面計(jì)算得到的z表示。而選擇的門控信號(hào)則是由z(i代表information)來(lái)進(jìn)行控制。輸出階段將決定哪些將會(huì)被當(dāng)成當(dāng)前狀態(tài)的輸出——主要是通過(guò)zo來(lái)進(jìn)行控制——并對(duì)上一階段得到的co進(jìn)行放縮(通過(guò)一個(gè)tanh激活函數(shù)進(jìn)行變化)。
當(dāng)前,LSTM模型已經(jīng)在重力壩變形預(yù)測(cè)、土石壩滲流預(yù)測(cè)和土石壩沉降預(yù)測(cè)等方面得到了應(yīng)用。這些研究充分說(shuō)明了LSTM模型在水工結(jié)構(gòu)工程安全監(jiān)測(cè)方面的巨大潛力。因此,本文立足實(shí)際工程,嘗試將LSTM模型應(yīng)用于船閘位移變形的預(yù)測(cè)中。基于LSTM模型,本文構(gòu)建了船閘位移預(yù)測(cè)模型。以環(huán)境量作為輸入層輸入,以船閘位移作為輸出層輸出。通過(guò)將長(zhǎng)序列的環(huán)境量和位移量輸入到LSTM模型中進(jìn)行訓(xùn)練,來(lái)獲得具備時(shí)間關(guān)聯(lián)度和數(shù)據(jù)深度挖掘能力的船閘位移預(yù)測(cè)模型。
2 ?算例分析
本文以南方珠江流域某船閘的監(jiān)測(cè)數(shù)據(jù)為例,基于LSTM算法建立船閘位移預(yù)測(cè)模型。該船閘位于廣西,由上下游引航道、上閘首、閘室、下閘首組成。船閘閘室有效尺寸為:280 m×34 m,采用人字形閘門,最高擋水位達(dá)47.5 m,最大通過(guò)船隊(duì)為6×3 000噸,年貨運(yùn)量達(dá)5 189萬(wàn)噸。該船閘于2020年4月正式建成通航。
本文通過(guò)在船閘內(nèi)部布置的多點(diǎn)位移傳感器讀取得到船閘的真實(shí)位移量。本文采用的多點(diǎn)位移計(jì)為基康儀器生產(chǎn)的BGK-A3多點(diǎn)位移計(jì)。該位移計(jì)由錨頭、測(cè)桿、PVC保護(hù)桿、過(guò)渡桿以及安裝基座構(gòu)成,安裝在閘室右側(cè)工作閥門附近,可以測(cè)量出船閘三個(gè)不同高程處的位移變形。本文以基底處的位移數(shù)據(jù)為例,日期區(qū)間為2020年4月—2022年7月。
本文所提出的船閘位移預(yù)測(cè)模型是一個(gè)關(guān)于溫度T、水壓H以及結(jié)構(gòu)自身的時(shí)變t三個(gè)因素的映射模型[4],假設(shè)船閘位置y處的位移D可以表示為:
(5)
式中:f1(T,y)表示與位置y處的溫度有關(guān)的溫度分量;f2(H,y)表示與上下游水位差有關(guān)的水壓分量;f3(T,y)表示與船閘運(yùn)行時(shí)長(zhǎng)有關(guān)的時(shí)效分量。溫度值可以由多點(diǎn)位移計(jì)一并測(cè)得;水位差由超聲波水位計(jì)讀取上下游水位后相減得到;而對(duì)于時(shí)效分量,通常可用式(6)近似計(jì)算得到。
(6)
式中:c1和c2為待確定常數(shù),θ = t(船閘運(yùn)行天數(shù))×0.01。之所以在式中加入ln θ,是因?yàn)樗そㄖ锏臅r(shí)效變形往往是非線性且緩慢增加的。
3 ?結(jié)果分析
基于構(gòu)建的訓(xùn)練集和測(cè)試集,本文對(duì)LSTM模型進(jìn)行訓(xùn)練。如表1所示,本文的LSTM模型的優(yōu)化器為梯度下降,步長(zhǎng)為0.1;初始學(xué)習(xí)率為0.005,每經(jīng)過(guò)25次迭代會(huì)乘0.1。
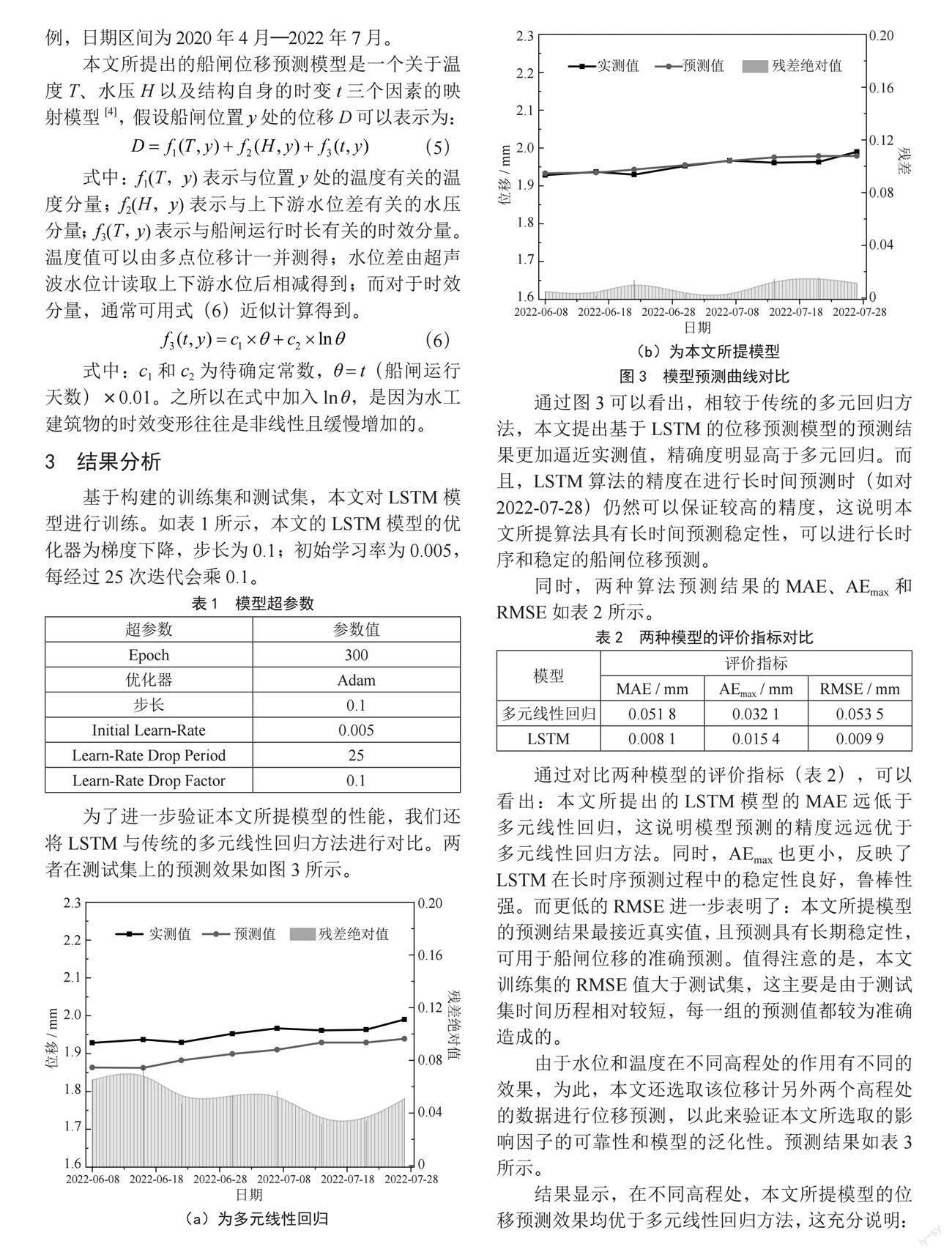
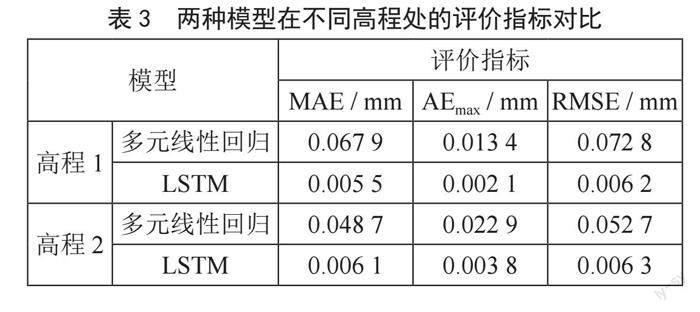
為了進(jìn)一步驗(yàn)證本文所提模型的性能,我們還將LSTM與傳統(tǒng)的多元線性回歸方法進(jìn)行對(duì)比。兩者在測(cè)試集上的預(yù)測(cè)效果如圖3所示。
通過(guò)圖3可以看出,相較于傳統(tǒng)的多元回歸方法,本文提出基于LSTM的位移預(yù)測(cè)模型的預(yù)測(cè)結(jié)果更加逼近實(shí)測(cè)值,精確度明顯高于多元回歸。而且,LSTM算法的精度在進(jìn)行長(zhǎng)時(shí)間預(yù)測(cè)時(shí)(如對(duì)2022-07-28)仍然可以保證較高的精度,這說(shuō)明本文所提算法具有長(zhǎng)時(shí)間預(yù)測(cè)穩(wěn)定性,可以進(jìn)行長(zhǎng)時(shí)序和穩(wěn)定的船閘位移預(yù)測(cè)。
同時(shí),兩種算法預(yù)測(cè)結(jié)果的MAE、AEmax和RMSE如表2所示。
通過(guò)對(duì)比兩種模型的評(píng)價(jià)指標(biāo)(表2),可以看出:本文所提出的LSTM模型的MAE遠(yuǎn)低于多元線性回歸,這說(shuō)明模型預(yù)測(cè)的精度遠(yuǎn)遠(yuǎn)優(yōu)于多元線性回歸方法。同時(shí),AEmax也更小,反映了LSTM在長(zhǎng)時(shí)序預(yù)測(cè)過(guò)程中的穩(wěn)定性良好,魯棒性強(qiáng)。而更低的RMSE進(jìn)一步表明了:本文所提模型的預(yù)測(cè)結(jié)果最接近真實(shí)值,且預(yù)測(cè)具有長(zhǎng)期穩(wěn)定性,可用于船閘位移的準(zhǔn)確預(yù)測(cè)。值得注意的是,本文訓(xùn)練集的RMSE值大于測(cè)試集,這主要是由于測(cè)試集時(shí)間歷程相對(duì)較短,每一組的預(yù)測(cè)值都較為準(zhǔn)確造成的。
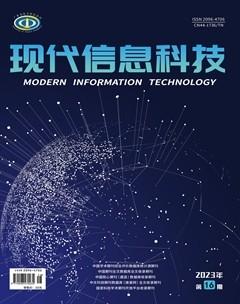
由于水位和溫度在不同高程處的作用有不同的效果,為此,本文還選取該位移計(jì)另外兩個(gè)高程處的數(shù)據(jù)進(jìn)行位移預(yù)測(cè),以此來(lái)驗(yàn)證本文所選取的影響因子的可靠性和模型的泛化性。預(yù)測(cè)結(jié)果如表3所示。
結(jié)果顯示,在不同高程處,本文所提模型的位移預(yù)測(cè)效果均優(yōu)于多元線性回歸方法,這充分說(shuō)明:本文所提模型在不同高程處均有良好的效果,水位、時(shí)間和溫度對(duì)不同高度的船閘位移變形均起著關(guān)鍵作用。
4 ?結(jié) ?論
針對(duì)船閘在長(zhǎng)期服役過(guò)程中出現(xiàn)的位移變形難以預(yù)測(cè)的問(wèn)題,本文通過(guò)深度學(xué)習(xí)的方法有效解決了這一問(wèn)題,并通過(guò)實(shí)驗(yàn)驗(yàn)證該方法的有效性,本文結(jié)論如下:
1)提出了基于LSTM的船閘位移預(yù)測(cè)模型利用溫度、水位差以及兩個(gè)時(shí)效量作為輸入,船閘的位移變形量作為輸出,有效解決了位移預(yù)測(cè)中多因素耦合和非線性作用的問(wèn)題,從而進(jìn)一步提高了船閘位移的預(yù)測(cè)精確度。
2)通過(guò)工程實(shí)例與多元回歸方法對(duì)某船閘從2022年6月—2022年8月的位移預(yù)測(cè)結(jié)果進(jìn)行對(duì)比,證明了該模型的預(yù)測(cè)效果優(yōu)于多元回歸模型,具有較好的應(yīng)用價(jià)值。
3)將本文所提出的模型進(jìn)一步推廣至不同的多點(diǎn)位移計(jì)上,預(yù)測(cè)效果也均優(yōu)于傳統(tǒng)的多元線性回歸。證明了本文所提算法的有效性和可推廣性。
參考文獻(xiàn):
[1] 第一次全國(guó)水利普查公報(bào) [J].中國(guó)水利,2013(7):1-3.
[2] 覃盼.三峽壩區(qū)船舶通航安全風(fēng)險(xiǎn)演化規(guī)律研究 [D].武漢:武漢理工大學(xué),2016.
[3] 王文意.風(fēng)險(xiǎn)源管理在葛洲壩船閘檢修中的應(yīng)用 [J].交通企業(yè)管理,2016,31(3):69-71.
[4] 張?zhí)?基于SVR和PSO-BP的船閘三維動(dòng)態(tài)風(fēng)險(xiǎn)管理方法研究 [D].哈爾濱:哈爾濱工程大學(xué),2020.
[5] 苑敬舜.塢式船閘閘首結(jié)構(gòu)應(yīng)力變形三維有限元分析 [D].合肥:合肥工業(yè)大學(xué),2015.
作者簡(jiǎn)介:丁騰騰(1988.06—),男,漢族,安徽阜陽(yáng)人,工程師,學(xué)士學(xué)位,研究方向:水利水電工程。
- 現(xiàn)代信息科技的其它文章
- 混合式教學(xué)在軟件開(kāi)發(fā)設(shè)計(jì)模式課程中的應(yīng)用實(shí)踐
- 基于超星平臺(tái)的線上線下混合教學(xué)模式探索與實(shí)踐
- MATLAB在高等數(shù)學(xué)課程教學(xué)中的可視化應(yīng)用
- 面向應(yīng)用型大學(xué)的信息化實(shí)踐
- 基于機(jī)器視覺(jué)的工件計(jì)數(shù)系統(tǒng)設(shè)計(jì)
- 海上風(fēng)電基礎(chǔ)結(jié)構(gòu)自動(dòng)化監(jiān)測(cè)系統(tǒng)關(guān)鍵技術(shù)與應(yīng)用研究