基于毫米波雷達(dá)的駕駛員疲勞監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
2023-09-27 14:20:48張濤
電子制作 2023年17期
張濤
(淮南聯(lián)合大學(xué) 智能制造學(xué)院,安徽淮南,232038)
0 引言
引發(fā)交通事故的一個(gè)重要原因是駕駛員疲勞駕駛或突發(fā)疾病而使車(chē)輛失控。疲勞后,以感知功能減弱、注意力下降、駕駛操作行為紊亂、反應(yīng)時(shí)間延長(zhǎng)等表現(xiàn)為駕駛員生理上的變化和對(duì)駕駛行為的影響,極易造成判斷失誤和操作失誤,從而導(dǎo)致道路交通事故的發(fā)生。因此,應(yīng)積極利用人防、技防等手段加強(qiáng)對(duì)疲勞駕駛行為的監(jiān)測(cè),以防此類(lèi)問(wèn)題引發(fā)的交通事故。
國(guó)內(nèi)外主要從駕駛員生理指標(biāo)檢測(cè)、駕駛面部特征檢測(cè)、駕駛操作特征及車(chē)輛行駛狀態(tài)檢測(cè)等方面開(kāi)展研究,各種方法均有一定的理論研究基礎(chǔ)和技術(shù)可行性,其中大部分方法已有產(chǎn)品應(yīng)用,目前國(guó)內(nèi)外已有相關(guān)技術(shù)同時(shí),在應(yīng)用各種方法和技術(shù)方面也有局限性。雖然當(dāng)前普及的大多數(shù)疲勞駕駛系統(tǒng)可以在一定程度上對(duì)駕駛疲勞進(jìn)行監(jiān)測(cè),但仍然存在一些缺欠和短板的地方。現(xiàn)有的方法大多采用接觸測(cè)量法,對(duì)監(jiān)測(cè)生理信息往往需要司機(jī)攜帶或安裝大量的設(shè)備,這對(duì)司機(jī)的正常行為會(huì)造成一定的困擾。同時(shí),利用機(jī)器視覺(jué)技術(shù)單一地探測(cè)環(huán)境,使得駕駛員在白天的疲勞測(cè)試更為精確,而在夜間是駕駛疲勞的高峰期,駕駛員的疲勞監(jiān)測(cè)的精準(zhǔn)度并不理想。基于毫米波雷達(dá)的駕駛員疲勞駕駛監(jiān)測(cè)技術(shù)可有效彌補(bǔ)現(xiàn)有技術(shù)手段的不足,以其非接觸性、高靈敏性、抗干擾能力強(qiáng)等特點(diǎn)逐漸成為未來(lái)主流技術(shù)。
1 系統(tǒng)方案設(shè)計(jì)
毫米波雷達(dá)是利用電磁波向外發(fā)射來(lái)探測(cè)障礙物,傳播時(shí)如果遇到障礙物就反射信號(hào),通過(guò)雷達(dá)的接收天線接收回波信號(hào),然后將障礙物的距離和徑向速度等物理信息提取出來(lái),進(jìn)行混頻和信號(hào)處理。除此之外,毫米波技術(shù)還帶來(lái)了優(yōu)勢(shì),可對(duì)人體進(jìn)行無(wú)接觸地持續(xù)監(jiān)視。通過(guò)捕獲和處理反射信號(hào),雷達(dá)系統(tǒng)可以確定物體的距離、速度和角度。毫米波雷達(dá)在物體距離檢測(cè)中可以提供毫米級(jí)別的精度,因而成為生命體征信號(hào)的理想非接觸式監(jiān)測(cè)技術(shù)。毫米波雷達(dá)傳感器以體積小、質(zhì)量輕、精度高為特點(diǎn),具有全天候全天時(shí)工作優(yōu)勢(shì),對(duì)霧、煙、粉塵具有較強(qiáng)的抗干擾能力。
雷達(dá)核心部分采用了TI 公司的高性能毫米波雷達(dá)芯片AWR1843,該芯片是單芯片76GHz~81GHz 的汽車(chē)?yán)走_(dá)傳感器,集成了DSP 子系統(tǒng)、MCU 和硬件加速模塊(HWA)。雷達(dá)采用3 發(fā)4 收MIMO 的設(shè)計(jì)方案,可在常規(guī)雷達(dá)的基礎(chǔ)上進(jìn)一步提高角度分辨率,并且縮小雷達(dá)尺寸。信號(hào)處理算法的實(shí)現(xiàn)全部在AWR1843 芯片內(nèi)完成,并將檢測(cè)結(jié)果通過(guò)CAN 發(fā)送到車(chē)身控制器,進(jìn)行目標(biāo)特征提取和模式識(shí)別,決策出相應(yīng)區(qū)域有無(wú)目標(biāo),以及目標(biāo)生命體征狀態(tài)信息。同時(shí),通過(guò)UART 可以向上位機(jī)輸出調(diào)試狀態(tài)下的生命體征信息。
雷達(dá)支持的直流電壓范圍是6V~30V。在12V 電源下,工作電流為200mA 左右,峰值電流不超過(guò)350mA,系統(tǒng)的寄生電流不超過(guò)100μA。當(dāng)雷達(dá)系統(tǒng)收到休眠指令,或從CAN 總線不能得到信息時(shí),會(huì)進(jìn)入休眠模式,休眠模式下,每個(gè)雷達(dá)傳感器的電流不超過(guò)50μA。它不受光線、溫度和灰塵的影響,相對(duì)于駕駛員生理指標(biāo)檢測(cè)、駕駛面部特征檢測(cè)、駕駛操作特征和車(chē)輛行駛狀態(tài)檢測(cè)而言,具有極高的探測(cè)精度。
■1.1 系統(tǒng)框架
根據(jù)駕駛員生命體征信息監(jiān)測(cè)對(duì)傳感器性能的要求,構(gòu)建出駕駛員生命體征監(jiān)測(cè)系統(tǒng),由系統(tǒng)硬件和系統(tǒng)軟件組成。根據(jù)硬件功能的不同,系統(tǒng)可以劃分為核心處理模塊AWR1843、FLASH 單元、電壓狀態(tài)采集單元、時(shí)鐘單元、狀態(tài)數(shù)據(jù)存儲(chǔ)單元、電源單元、對(duì)外接口單元等若干模塊。其連接關(guān)系如圖1 毫米波雷達(dá)系統(tǒng)硬件框圖所示。雷達(dá)采用FMCW 技術(shù),在天線陣列布局上,采用最小冗余陣列的設(shè)計(jì)方法,在陣元數(shù)量較少的情況下,可以忽略掉最小冗余陣列造成的柵瓣,因?yàn)椴捎昧讼鄬?duì)較少的3 發(fā)4 收通道數(shù)量,以增大天線陣列孔徑,僅能提高角度分辨率,同時(shí)提高了測(cè)角精度。
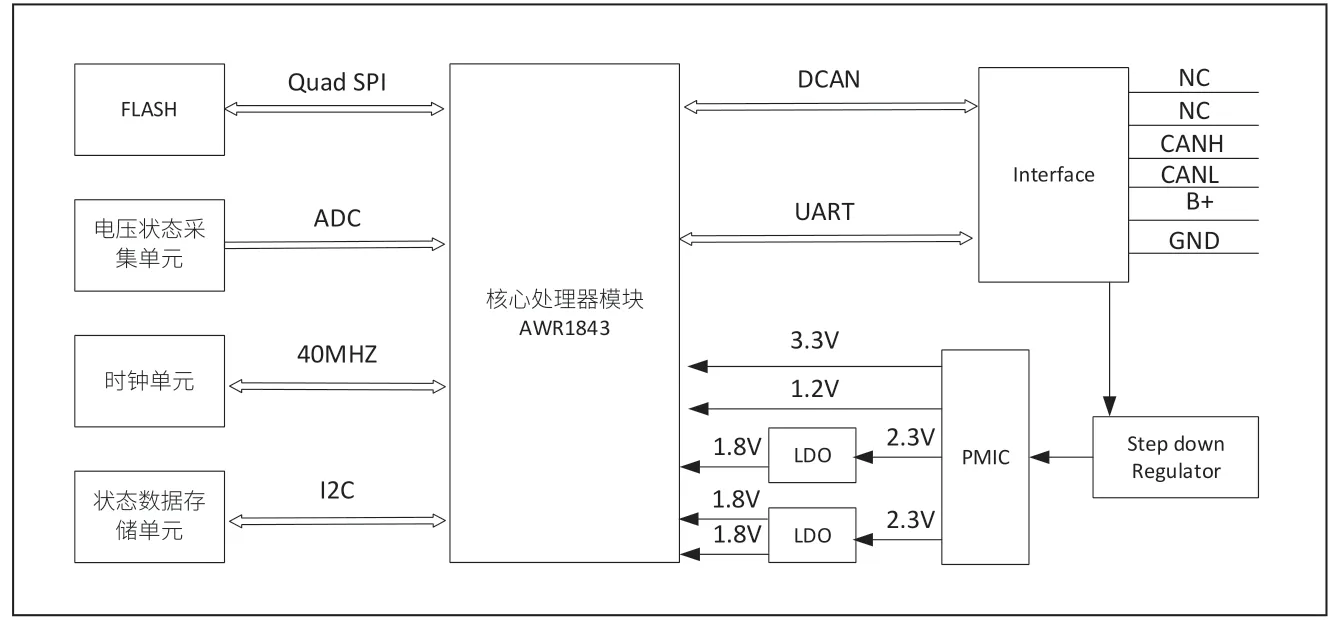
圖1 毫米波雷達(dá)系統(tǒng)硬件框圖
軟件系統(tǒng)是以TI官方開(kāi)發(fā)軟件和開(kāi)發(fā)語(yǔ)言開(kāi)發(fā)為基礎(chǔ),控制系統(tǒng)輸出駕駛員生命體征信息檢測(cè)結(jié)果。雷達(dá)硬件設(shè)備與控制計(jì)算機(jī)之間通過(guò)CAN 實(shí)現(xiàn)通訊,向主芯片發(fā)送雷達(dá)參數(shù)配置程序。配置雷達(dá)參數(shù):CHANNEL_CFG 命令將天線收發(fā)方式配置為3 發(fā)4 收模式;Profile_CFG 命令配置雷達(dá)工作頻率為77~81GHz,工作帶寬為4GHz,線性調(diào)頻脈沖數(shù)據(jù)率為6.25Hz,線性調(diào)頻脈沖斜率為70MHz/μs,ADC 點(diǎn)數(shù)為224,ADC 速率為4558Ksps。接收天線增益30dB;FRAME_CFG 命令配置幀周期為100ms,含線性FM 脈沖數(shù)為32/幀。Sensor_START 命令配置啟動(dòng)式傳感器;Sensor_STOP 指令配置終止傳感器;FLUSH_CFG 命令刷新舊的配置,并在Sensor_STOP 命令之后提供新的配置,向傳感器發(fā)送配置命令,以備下一次啟動(dòng)。采集雷達(dá)獲取的回波數(shù)據(jù),形成帶時(shí)間戳的文件保用于算法處理。
■1.2 關(guān)鍵元器件
系統(tǒng)關(guān)鍵元器件清單如表1 所示,所有關(guān)鍵元器件均選用車(chē)規(guī)級(jí)別,阻容感等其他非關(guān)鍵元器件也均選用車(chē)規(guī)級(jí)別。其中DSP 處理器是所有數(shù)字信號(hào)處理、檢測(cè)、跟蹤、聚類(lèi)和其他算法發(fā)生的處理單元。CAN 通信芯片用于完成車(chē)機(jī)互聯(lián),為車(chē)輛提供駕駛員疲勞監(jiān)測(cè)數(shù)據(jù),雷達(dá)系統(tǒng)能捕捉到異常時(shí)車(chē)輛發(fā)出提醒聲音以喚醒駕駛者或采取其他必要措施。

表1 系統(tǒng)關(guān)鍵元器件清單
■1.3 對(duì)外接口與安裝
雷達(dá)對(duì)外接插件采用TE 公司的6pins 的專(zhuān)用接插件175506-2,定義如表2 所示。雷達(dá)由蓄電池供電,雷達(dá)采集信息通過(guò)CAN總線與車(chē)機(jī)相連,提供車(chē)機(jī)關(guān)鍵決策信息。雷達(dá)安裝在車(chē)輛頂部,左右居中,距駕駛員靠背的縱向距離推薦為1m,安裝時(shí)需確保空間足夠,需確保雷達(dá)接插件端口相對(duì)于車(chē)輛方向向左或向右,推薦雷達(dá)架設(shè)角度為向后傾斜30°,具體安裝位置及架設(shè)角度視車(chē)輛內(nèi)部空間而定。

表2 對(duì)外接插件定義
2 雷達(dá)檢測(cè)原理
毫米波雷達(dá)向人體胸部區(qū)域發(fā)射線性調(diào)頻脈沖,由于胸部的運(yùn)動(dòng),反射信號(hào)是相位調(diào)制的,調(diào)制涵蓋運(yùn)動(dòng)的所有分量,包括心跳和呼吸引起的運(yùn)動(dòng)。三發(fā)射天線分時(shí)發(fā)射快掃線性調(diào)頻連續(xù)波信號(hào),回波經(jīng)四路接收天線返回雷達(dá)接收機(jī),經(jīng)混頻濾波等處理,由AD 進(jìn)行中頻信號(hào)變?yōu)閿?shù)字信號(hào),對(duì)四路正交I/Q 信號(hào)做乒乓緩存,分別進(jìn)行距離到一維FFT處理,再進(jìn)行CAPON 譜估計(jì),形成距離角度的二維熱力圖,從熱力圖上進(jìn)行目標(biāo)特征提取和模式識(shí)別,決策出相應(yīng)區(qū)域成員的生命體征信息,信號(hào)處理流程如圖2 所示。

圖2 信號(hào)處理流程
■2.1 測(cè)距原理
雷達(dá)的基本工作之一就是測(cè)量目標(biāo)的距離。如圖3 頻差法測(cè)距示意圖,發(fā)射的快速掃描線性調(diào)頻連續(xù)波信號(hào)FMCW 電磁波在空氣中向前方傳播,經(jīng)障礙物反射,往返一次所需的時(shí)間延遲τ,其頻率與回波頻率相比在這段時(shí)間內(nèi)發(fā)生了變化,因而在調(diào)頻規(guī)律和回波延遲共同決定了這個(gè)中頻信號(hào)在混頻器輸出端的頻率差f。通過(guò)頻差f 可求取延遲時(shí)間τ,進(jìn)而得知目標(biāo)距離。目標(biāo)距離由計(jì)算公式(1)得,延時(shí)時(shí)間由計(jì)算公式(2)得。

圖3 頻差法測(cè)距示意圖
■2.2 測(cè)角原理
由于電磁波沿直線傳播,目標(biāo)散射或反射電磁波波前到達(dá)的方向,即為目標(biāo)所在方向。一般情況下,目標(biāo)角度的測(cè)量采用相位法,即利用多根天線所接收的回波信號(hào)之間的相位差來(lái)測(cè)量角度。如圖4 所示,設(shè)在θ 方向有一遠(yuǎn)區(qū)目標(biāo),則到達(dá)接收點(diǎn)的目標(biāo)所反射的電磁波近似為平面波。設(shè)兩天線的間距為d,所以它們接收到的信號(hào)有波程差?R,而波程差又造成了與其相位差φ 的現(xiàn)象。通過(guò)求取該相位差而得到目標(biāo)回波方向θ,波程差?R由計(jì)算公式(3)得。

圖4 相位法測(cè)角示意圖
通過(guò)上述方法可獲得距離和方位信息,通過(guò)軟件設(shè)置有效的距離范圍、角度范圍,從而限定檢測(cè)區(qū)域的邊界,滿足不同車(chē)型駕駛員區(qū)域的完整覆蓋。
■2.3 技術(shù)指標(biāo)
毫米波雷達(dá)技術(shù)指示如表3 所示。

表3 毫米波雷達(dá)技術(shù)指標(biāo)
■2.4 功能測(cè)試
當(dāng)車(chē)輛啟動(dòng)后,雷達(dá)被喚醒,開(kāi)始自動(dòng)檢測(cè),從模塊收到探測(cè)請(qǐng)求,到完成探測(cè)、發(fā)送探測(cè)結(jié)果,一般耗時(shí)小于1s。一旦發(fā)現(xiàn)駕駛員有疲勞駕駛的行為,迅速發(fā)出報(bào)警信號(hào),同時(shí)汽車(chē)中控系統(tǒng)還可以強(qiáng)制啟動(dòng)輔助救助裝置,從而達(dá)到保障車(chē)內(nèi)人員人身安全的目的,減少交通事故發(fā)生的概率。該系統(tǒng)除能精確檢測(cè)出駕駛員的生命體征狀態(tài)信息,實(shí)時(shí)監(jiān)測(cè)駕駛員是否疲勞駕駛,另可用于車(chē)內(nèi)成員檢測(cè),避免兒童或?qū)櫸锉贿z留在車(chē)內(nèi)而引發(fā)的安全事故發(fā)生。如圖5 上位機(jī)顯示所示為駕駛員的心跳與呼吸信息。

圖5 心跳與呼吸信息
3 總結(jié)
在這樣的系統(tǒng)中,由于傳統(tǒng)的相機(jī)等傳感器難以感知到生理信號(hào),且從設(shè)計(jì)角度來(lái)說(shuō),攝像頭必須裸露在外,視野被遮擋難以避免。而在塑料遮擋物背后可以安裝毫米波雷達(dá),且對(duì)遮擋并不敏感,因此,毫米波雷達(dá)將成為感知系統(tǒng)的重要一環(huán)。雖然現(xiàn)在還沒(méi)有具體規(guī)定,但眾多半導(dǎo)體巨頭已經(jīng)在積極準(zhǔn)備中,車(chē)內(nèi)生理信號(hào)識(shí)別將是未來(lái)毫米波雷達(dá)的增量市場(chǎng)。而當(dāng)車(chē)載毫米波雷達(dá)在生理信號(hào)監(jiān)測(cè)應(yīng)用中驗(yàn)證了之后,就有機(jī)會(huì)向健康護(hù)理相關(guān)應(yīng)用的醫(yī)院和家庭推廣,值得我們期待這些更深入的應(yīng)用。基于毫米波雷達(dá)的駕駛員生命體征監(jiān)測(cè)系統(tǒng),能夠?qū)崿F(xiàn)靈敏感知輕微呼吸的胸部運(yùn)動(dòng)幅度變化探測(cè),快速判斷駕駛員是否疲勞駕駛,必要時(shí)可發(fā)出警告提醒或采取緊急制動(dòng)等措施,綜合考慮該領(lǐng)域現(xiàn)階段技術(shù)發(fā)展情況,我國(guó)在該領(lǐng)域尚處于起步階段。本系統(tǒng)為解決駕駛員疲勞探測(cè)問(wèn)題提供了智能解決方案,避免了駕駛員疲勞駕駛導(dǎo)致的事故和傷亡。
猜你喜歡
汽車(chē)實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車(chē)實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
公民與法治(2016年4期)2016-05-17 04:09:26