超高速公路虛擬軌道模型的構(gòu)建與驗(yàn)證研究
2023-10-08 12:44:06何永明陳世升
何永明,馮 佳,權(quán) 聰,曹 劍,3,陳世升
(1.東北林業(yè)大學(xué) 土木與交通學(xué)院,黑龍江 哈爾濱 150040;2.東北林業(yè)大學(xué) 交通研究中心,黑龍江 哈爾濱 150040;3.比亞迪股份有限公司 汽車工程研究院,廣東 深圳 518118))
0 引 言
研究團(tuán)隊(duì)自2016年提出超高速公路概念以來,對(duì)其經(jīng)濟(jì)性、安全性等進(jìn)行了深入研究,結(jié)果表明安全性是發(fā)展超高速公路的最大障礙。我國設(shè)計(jì)車速超過120 km/h高速公路相關(guān)研究還處于起步階段,對(duì)設(shè)計(jì)車速超過120 km/h的“超高速公路”安全性的研究需求非常迫切。2018年,我國首條設(shè)計(jì)速度為150 km/h的“杭紹甬”超高速公路開工建設(shè),預(yù)計(jì)于2023年底通車。2019年3月,設(shè)置自動(dòng)駕駛專用車道的“京雄”高速公路也獲得立項(xiàng),超高速公路的發(fā)展速度遠(yuǎn)遠(yuǎn)超過預(yù)期。
虛擬軌道技術(shù)將車輛限制在由“車”和“路”聯(lián)動(dòng)控制的虛擬軌道安全范圍內(nèi)行駛。經(jīng)過研究團(tuán)隊(duì)的論證,超三級(jí)高速公路主要服務(wù)于自動(dòng)駕駛車輛,隨著自動(dòng)駕駛和智慧交通時(shí)代的來臨,車輛智能化和網(wǎng)聯(lián)化的推進(jìn)對(duì)現(xiàn)有的交通基礎(chǔ)設(shè)施、車輛組織管控、車路協(xié)同水平和行駛安全保障提出了更高的要求和挑戰(zhàn)。筆者建立了數(shù)學(xué)模型,當(dāng)超高速公路車輛將要駛離虛擬軌道安全范圍時(shí),車輛及駕駛員可以得到反饋,以保證車輛不脫離虛擬軌道安全閾值范圍。研究結(jié)果表明:筆者提出的超高速公路虛擬軌道系統(tǒng)可將車輛限制在虛擬軌道安全范圍內(nèi)行駛,保證超高速公路行車的安全性。因此提出超高速公路虛擬軌道模型研究問題有著重要的理論價(jià)值和現(xiàn)實(shí)意義。
1 相關(guān)研究概述
1.1 超高速公路
研究團(tuán)隊(duì)在對(duì)公路施工技術(shù)、汽車新技術(shù)和國外高速公路成功運(yùn)營經(jīng)驗(yàn)進(jìn)行分析的基礎(chǔ)上,經(jīng)過多輪專家論證,根據(jù)設(shè)計(jì)速度將超高速公路劃分為3個(gè)等級(jí)。超高速公路等級(jí)劃分如表1。

表1 超高速公路等級(jí)劃分
2020年,研究團(tuán)隊(duì)考慮“人”、“車”和“路”特性,研究了不同等級(jí)超高速公路縱斷面設(shè)計(jì)參數(shù)[1]。2021年,團(tuán)隊(duì)通過研究得到影響汽車燃油消耗的16個(gè)影響因素,其中行駛速度是最關(guān)鍵因素[2]。
在研究團(tuán)隊(duì)的影響下,國內(nèi)一批學(xué)者也陸續(xù)加入了超高速公路的研究。劉展行[3]通過對(duì)現(xiàn)有高速公路系統(tǒng)存在的問題進(jìn)行分析,對(duì)未來超級(jí)高速公路的發(fā)展提出了大膽的設(shè)想;趙酉超等[4]研究了超高速公路的理論通行能力和汽車運(yùn)行經(jīng)濟(jì)性,并對(duì)超高速公路的部分線形指標(biāo)進(jìn)行了研究,結(jié)果顯示超高速公路的建設(shè)和運(yùn)營具有可行性;陳芬菲等[5]針對(duì)超高速公路在施工建設(shè)期及運(yùn)營管理期間的特征優(yōu)勢與劣勢、外部環(huán)境的機(jī)遇與威脅,通過運(yùn)用SWOT分析法,為超高速公路未來發(fā)展提供建議。
綜上所述,發(fā)展設(shè)計(jì)車速超過120 km/h的超高速公路已經(jīng)成為了一個(gè)迫在眉睫的問題,如何解決超高速公路運(yùn)營過程中的安全問題也就顯得尤為重要。
1.2 虛擬軌道
虛擬軌道通過道路基礎(chǔ)設(shè)施為自動(dòng)駕駛車輛提供數(shù)據(jù)信息,使自動(dòng)駕駛車輛能更好地與其他車輛和道路環(huán)境形成協(xié)同,以提高自動(dòng)駕駛車輛的運(yùn)行安全性。現(xiàn)有關(guān)于虛擬軌道的研究大多針對(duì)城市交通,用來解決目前城市交通發(fā)展的滯后性及“人”、“車”、“路”三者不協(xié)調(diào),造成的交通環(huán)境惡化,交通結(jié)構(gòu)低效等問題。
2017年6月,全球首列虛擬軌道列車在湖南株洲亮相。2019年12月,全球首條商業(yè)化運(yùn)營的超級(jí)虛擬軌道快運(yùn)線在四川宜賓開通,國內(nèi)如哈爾濱、江西永修等城市已開展試運(yùn)營[6]。徐偉[7]研究鹽城發(fā)展超級(jí)虛擬軌道的可行性,為鹽城實(shí)現(xiàn)城市公共交通系統(tǒng)升級(jí)提供新的選擇;侯凱文[8]在充分借鑒鐵路列車運(yùn)行控制思想的基礎(chǔ)上提出了虛擬軌道理論,為道路交通場景下規(guī)模化自動(dòng)駕駛車輛的管控創(chuàng)造條件;丁鐵成等[9]以虛擬軌道列車為研究對(duì)象,建立了舒適性評(píng)價(jià)體系,為虛擬軌道列車進(jìn)一步設(shè)計(jì)開發(fā)提供理論參考;花明磊[10]研究了虛擬軌道車輛的廣義綜合舒適度,建立了綜合舒適度評(píng)價(jià)裝置;柳慧鵬等[11]借助最新的智能交通中車輛網(wǎng)中V2X和5G通信技術(shù)和其他傳感技術(shù),提出融合感知的智能虛擬軌道交通系統(tǒng)框架,為開發(fā)智慧虛擬軌道交通系統(tǒng)提供參考;曾厚銘等[12]使用ADAMS軟件建立了三節(jié)編組的虛擬軌道列車虛擬樣機(jī)模型,通過仿真結(jié)果表明,建立的模型明顯改善了循跡效果;韓鵬[13]研究了一種新型城市軌道交通車輛—基于虛擬軌道的自導(dǎo)向有軌電車。該車輛集美觀、智能和節(jié)能環(huán)保于一體;孫幫成[14]建立了虛擬軌道列車運(yùn)動(dòng)學(xué)模型,提出各車間模塊低速運(yùn)動(dòng)時(shí)的獨(dú)立循跡控制方法;Y.M.HE等[15]研究了基于智能路鈕的超高速公路虛擬軌道系統(tǒng),結(jié)果表明當(dāng)超高速公路設(shè)計(jì)車速為140、160、180 km/h,路鈕間距離小于1.33、1.50、1.69 m時(shí),可以保證超高速公路行駛安全性;C.P.WANG等[16]基于車輛動(dòng)力學(xué)、輪胎動(dòng)力學(xué)和非線性動(dòng)力學(xué)理論,建立了包含3輛車輛的虛擬軌道列車的三維動(dòng)力學(xué)模型,利用實(shí)際虛擬軌道列車的現(xiàn)場動(dòng)態(tài)加速度試驗(yàn)對(duì)所建立的動(dòng)力學(xué)模型進(jìn)行了驗(yàn)證;D.H.ZHANG等[17]提出了一種新的跟蹤控制方法,在ADAMS中構(gòu)建了分布式驅(qū)動(dòng)主動(dòng)轉(zhuǎn)向鉸接式虛擬軌道列車仿真模型,通過仿真結(jié)果表明所提方法在各種軌道、不同速度下具有良好的跟蹤控制精度、適應(yīng)性和優(yōu)越性;P.HAN等[18]提出了一種基于虛擬軌道的新型道路車輛的構(gòu)想,該車具有速度適宜、容量大、造價(jià)低、環(huán)保等一系列優(yōu)點(diǎn);Z.H.YIN等[19]建立了具有路徑跟蹤性能的車輛和VTT的仿真框架,該仿真框架可進(jìn)一步應(yīng)用于動(dòng)力學(xué)相關(guān)評(píng)估、參數(shù)優(yōu)化和主動(dòng)懸架控制策略等方面;CUI Hongming等[20]為提高混合動(dòng)力虛擬軌道列車能量回收效率,提出一種已知線路信息條件下基于工況分割策略的能量管理方法。
2 虛擬軌道系統(tǒng)結(jié)構(gòu)組成
2.1 虛擬軌道系統(tǒng)總體結(jié)構(gòu)
分析超高速公路虛擬軌道模型時(shí),選取車輛質(zhì)點(diǎn)正下方的信號(hào)器作為分析對(duì)象,將車輛看做質(zhì)點(diǎn)進(jìn)行研究分析。超高速公路虛擬軌道系統(tǒng)由信息采集子系統(tǒng)、信息處理子系統(tǒng)和信息反饋?zhàn)酉到y(tǒng)組成。信息采集子系統(tǒng)通過對(duì)車輛進(jìn)行高精度定位,獲取得到前方路段的道路線形信息、車輛和道路之間的信息(速度和距離),并將采集到的信息傳遞給信息處理子系統(tǒng);信息處理子系統(tǒng)主要對(duì)傳輸進(jìn)來的信息進(jìn)行分析判斷,將分析結(jié)果傳遞到信息反饋?zhàn)酉到y(tǒng);信息反饋?zhàn)酉到y(tǒng)輸送信號(hào)至車輛信號(hào)器,給予車輛反饋以及相應(yīng)的警告信號(hào),保證車輛行駛在虛擬軌道安全范圍內(nèi),提高超高速公路行車的安全性。虛擬軌道系統(tǒng)擬采用5G技術(shù),實(shí)現(xiàn)信息高速實(shí)時(shí)傳遞。虛擬軌道系統(tǒng)的總體工作結(jié)構(gòu)如圖1和圖2。

圖1 虛擬軌道系統(tǒng)結(jié)構(gòu)
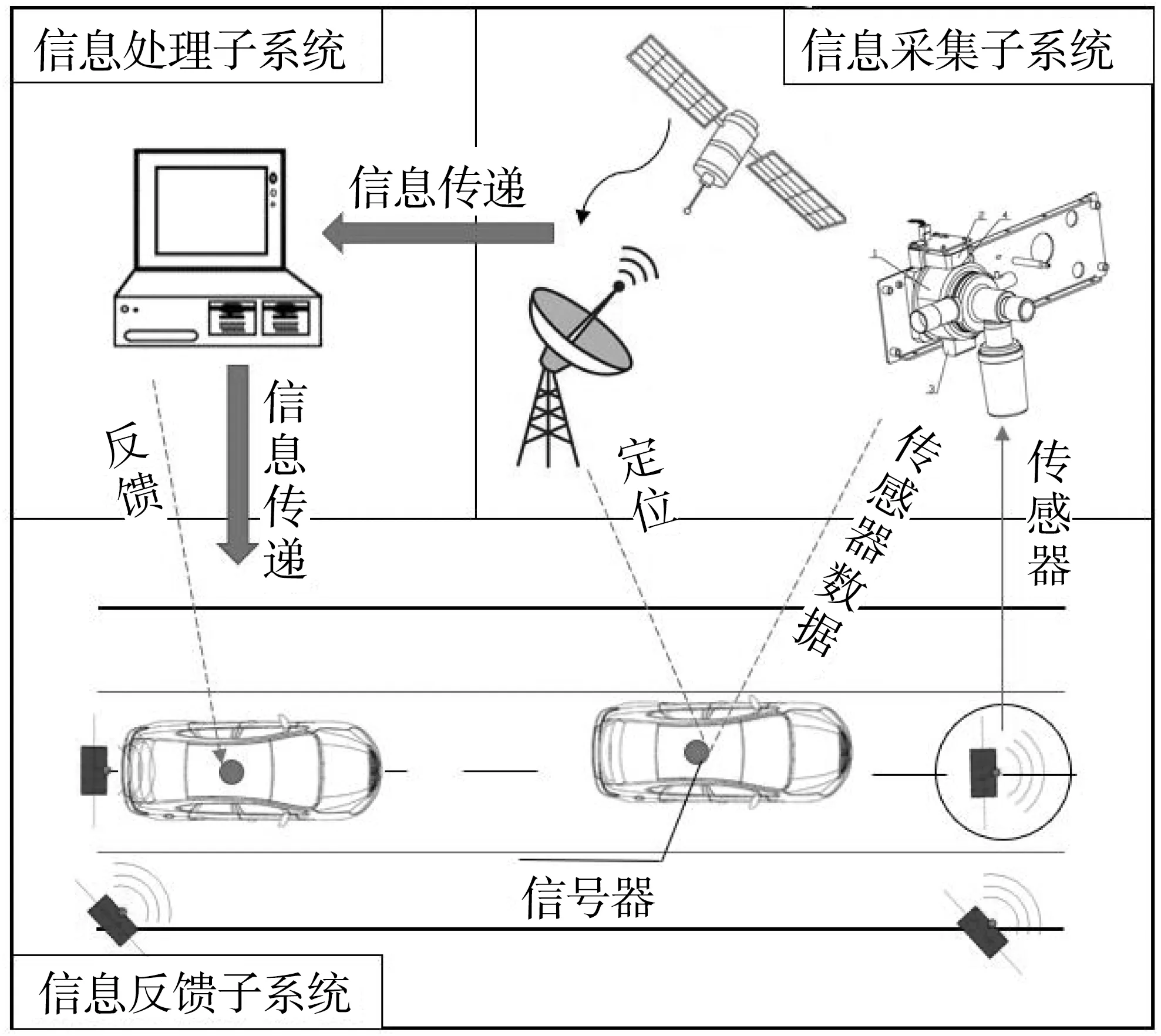
圖2 虛擬軌道系統(tǒng)組成
2.2 信息采集子系統(tǒng)
信息采集子系統(tǒng)具有道路線形和傳感器信息的采集和導(dǎo)入功能。信息采集子系統(tǒng)由GPS定位裝置和道路傳感器組成。GPS定位系統(tǒng)由空間部分(導(dǎo)航衛(wèi)星)、地面控制系統(tǒng)(主控站、監(jiān)測站、地面天線)和用戶設(shè)備部分(接收機(jī))組成[21],在虛擬軌道系統(tǒng)中,用車載型接收機(jī),即車輛作為接收機(jī)(圖3)。道路傳感器分別設(shè)置在車道中心線和道路路肩。通過對(duì)車輛進(jìn)行高精度定位,識(shí)別前方道路線形信息;通過測速裝置采集車輛實(shí)時(shí)速度信息;將高速行駛的車輛看做質(zhì)點(diǎn)進(jìn)行理論分析,在直線路段上,路側(cè)傳感器檢測到與車輛信號(hào)器之間的距離,將采集到的距離信息輸入到信息采集子系統(tǒng);在曲線路段上,將路側(cè)傳感器檢測到的實(shí)時(shí)速度信息和圓曲線半徑信息輸入到信息采集子系統(tǒng)。
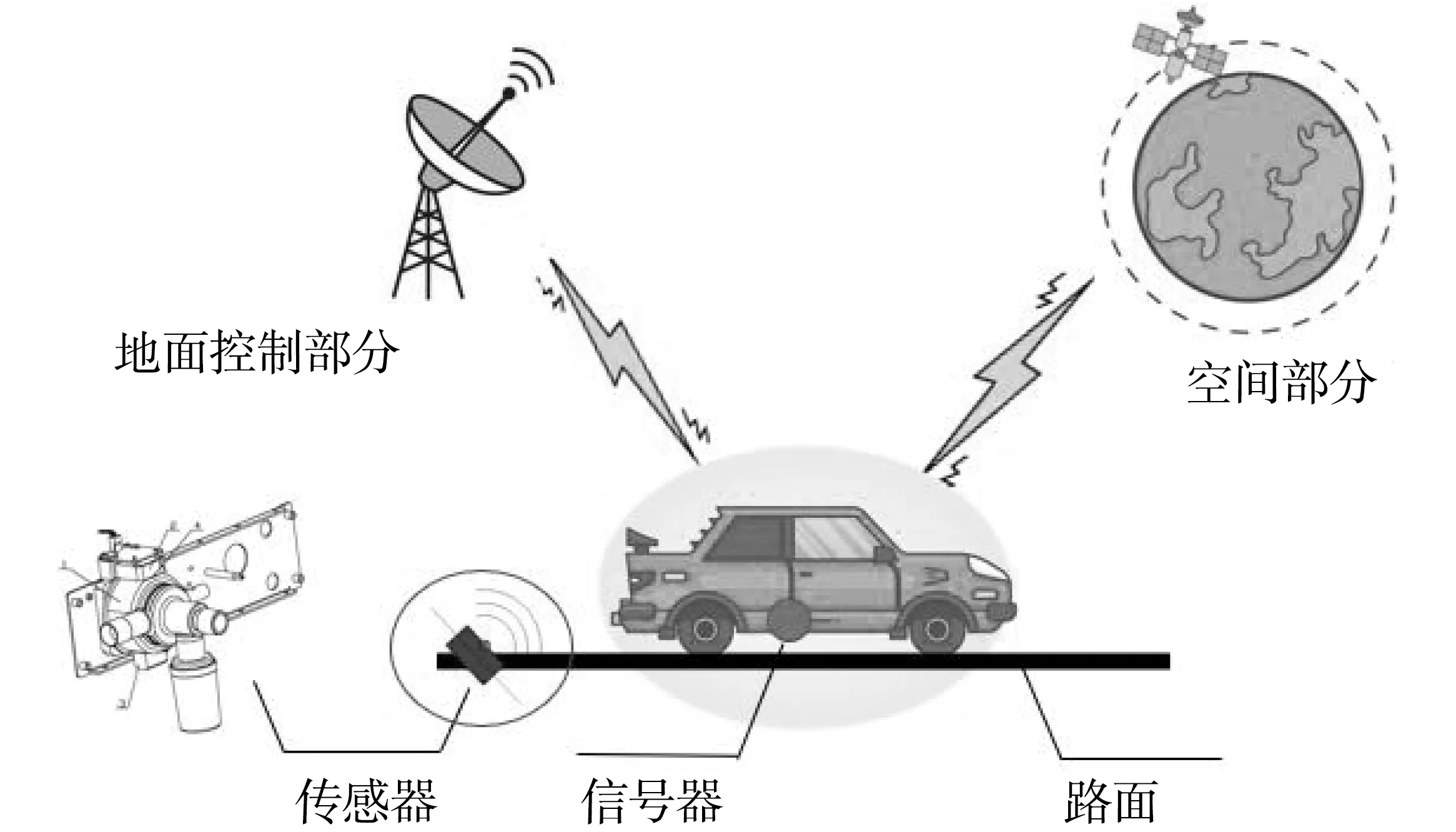
圖3 信息采集子系統(tǒng)
2.3 信息處理子系統(tǒng)
信息處理子系統(tǒng)具有信息采集子系統(tǒng)信息導(dǎo)入和預(yù)警信息輸出的功能。通過道路線形信息及路側(cè)測速裝置得到的速度信息,對(duì)車輛理想行駛軌跡進(jìn)行預(yù)估計(jì)。將信息處理結(jié)果輸入到信息反饋?zhàn)酉到y(tǒng),通過對(duì)車輛實(shí)際的行駛路線和系統(tǒng)預(yù)估計(jì)的行駛路線進(jìn)行對(duì)比,進(jìn)行分析判斷,給予行駛在虛擬軌道上的車輛反饋,提供預(yù)警信號(hào),及時(shí)做出調(diào)整,以提高超高速公路車輛行車的安全性。
2.4 信息反饋?zhàn)酉到y(tǒng)
信息反饋?zhàn)酉到y(tǒng)的功能是使車輛接收到虛擬軌道系統(tǒng)給予的預(yù)警信號(hào),即得到信息處理子系統(tǒng)的反饋,繼而對(duì)車輛采取相應(yīng)的措施,使得車輛行駛保持在虛擬軌道安全范圍之內(nèi)。安裝在車輛上的信號(hào)器可以接受信號(hào)處理子系統(tǒng)的信號(hào)(圖4),通過判斷給予車輛反饋。

圖4 道路傳感器與車載信號(hào)器
3 虛擬軌道模型建立
3.1 直線路段模型建立
假設(shè)車輛以速度v勻速行駛在直線路段上,為保證車輛不會(huì)偏離預(yù)設(shè)的軌道,在距道路中心線a處,設(shè)置距離傳感器,能夠檢測到傳感器本身與汽車質(zhì)心之間的距離(圖5)。假設(shè)虛擬軌道寬度為2l,為保證車輛行駛在虛擬軌道內(nèi),以汽車質(zhì)心作為原點(diǎn),建立直角坐標(biāo)系,以汽車行駛方向?yàn)閥軸,其切線方向?yàn)閤軸。當(dāng)汽車經(jīng)過時(shí)間t行駛到A點(diǎn),即汽車即將駛出虛擬軌道邊界,車輛距道路中心線lm。此時(shí),為了給予車輛反饋,需要虛擬軌道系統(tǒng)給車輛下達(dá)轉(zhuǎn)向命令。

圖5 直線路段偏離
當(dāng)車輛行駛在超高速公路上在以速度v=100、180 km/h勻速行駛時(shí),每秒的路程分別為27.8、50.0 m,一般單車道寬度為3.75 m,故車道中心線安全距離相對(duì)于超高速公路上汽車每秒行駛路程很小,如圖5,在車輛超出安全距離之前所行駛的橫向距離可忽略不計(jì),即車輛實(shí)際行駛的距離OA與車輛不發(fā)生偏離時(shí)行駛距離OA′近似相等,即OA≈OA′,以半徑r=OA,以O(shè)點(diǎn)為圓心畫圓(圖5),汽車實(shí)際位置與理想位置都在圓上。
在車輛到達(dá)汽車不發(fā)生偏離軌道的情況下,車輛理想位置如圖5中A′點(diǎn)所在位置,汽車經(jīng)過時(shí)間t,汽車實(shí)際行駛至A點(diǎn)所在位置。此時(shí),傳感器檢測到與汽車質(zhì)心之間的實(shí)際距離為:
Sr2=(vt)2-l2+(a-l)2
(1)
傳感器與汽車質(zhì)心之間的理想距離為:
Si2=(vt)2+a2
(2)
式中:Sr為傳感器檢測到與汽車之間的距離;Si為汽車與傳感器理想距離;v為汽車行駛速度;t為汽車即將超出安全中心線行駛的時(shí)間;l為汽車駛出虛擬軌道道路中心線的最大距離;a為傳感器距道路中心線的垂直距離。
以汽車右偏為例進(jìn)行分析,理論距離的平方與實(shí)際距離的平方差ΔS為:
ΔS=2al
(3)
同理得汽車向左偏離道路中心線時(shí)ΔS為:
ΔS=-2al
(4)
故當(dāng)系統(tǒng)檢測到ΔS≤-2al或ΔS>2al時(shí),汽車需要采取相應(yīng)的措施進(jìn)行調(diào)整。為使車輛行駛在虛擬軌道安全范圍內(nèi),當(dāng)ΔS≤-2al時(shí),汽車向左偏離虛擬軌道道路中心線,此時(shí)汽車應(yīng)執(zhí)行向右轉(zhuǎn)向的命令;當(dāng)ΔS>2al時(shí),汽車向右偏離虛擬軌道道路中心線,此時(shí)汽車應(yīng)執(zhí)行向左轉(zhuǎn)向的命令。
3.2 曲線路段模型建立
3.2.1 偏離虛擬軌道時(shí)間模型建立
為保證車輛轉(zhuǎn)彎時(shí)不發(fā)生側(cè)滑或側(cè)翻,可得前輪最大偏轉(zhuǎn)角,見式(5),行駛速度越大,前輪最大偏轉(zhuǎn)角越小,由于超高速公路設(shè)計(jì)速度大,故車輛轉(zhuǎn)彎時(shí)前輪最大偏轉(zhuǎn)角很小。
(5)
式中:φh為橫向摩擦因數(shù);ih為道路超高;β為前輪最大偏轉(zhuǎn)角;L為軸距。
故在研究曲線路段車輛偏離虛擬軌道時(shí),假設(shè)汽車以角度θ1向曲線外側(cè)駛離虛擬軌道道路中心線。汽車轉(zhuǎn)彎行駛時(shí),車身與曲線半徑垂直,前輪相對(duì)車身轉(zhuǎn)角為θ1,當(dāng)前輪與曲線半徑相切時(shí),即此刻車輛沿著速度方向行駛,車輪轉(zhuǎn)角為θ(θ>θ1),當(dāng)前輪轉(zhuǎn)角大于θ時(shí),即車輛向右轉(zhuǎn)彎。故研究車輛轉(zhuǎn)彎時(shí),車輛沿著與曲線半徑相切方向偏離虛擬軌道。汽車行駛在曲線路段上時(shí),在任一時(shí)刻,汽車車身與這一瞬時(shí)狀態(tài)所處的圓曲線相切,故選取某一時(shí)刻進(jìn)行分析,以車身方向,即汽車速度方向?yàn)閥軸,相對(duì)應(yīng)過圓心的切線方向?yàn)閤軸,建立直角坐標(biāo)系。以Q點(diǎn)為圓心,以此刻曲線半徑r畫圓,同時(shí),以半徑r+l畫圓(圖6)。
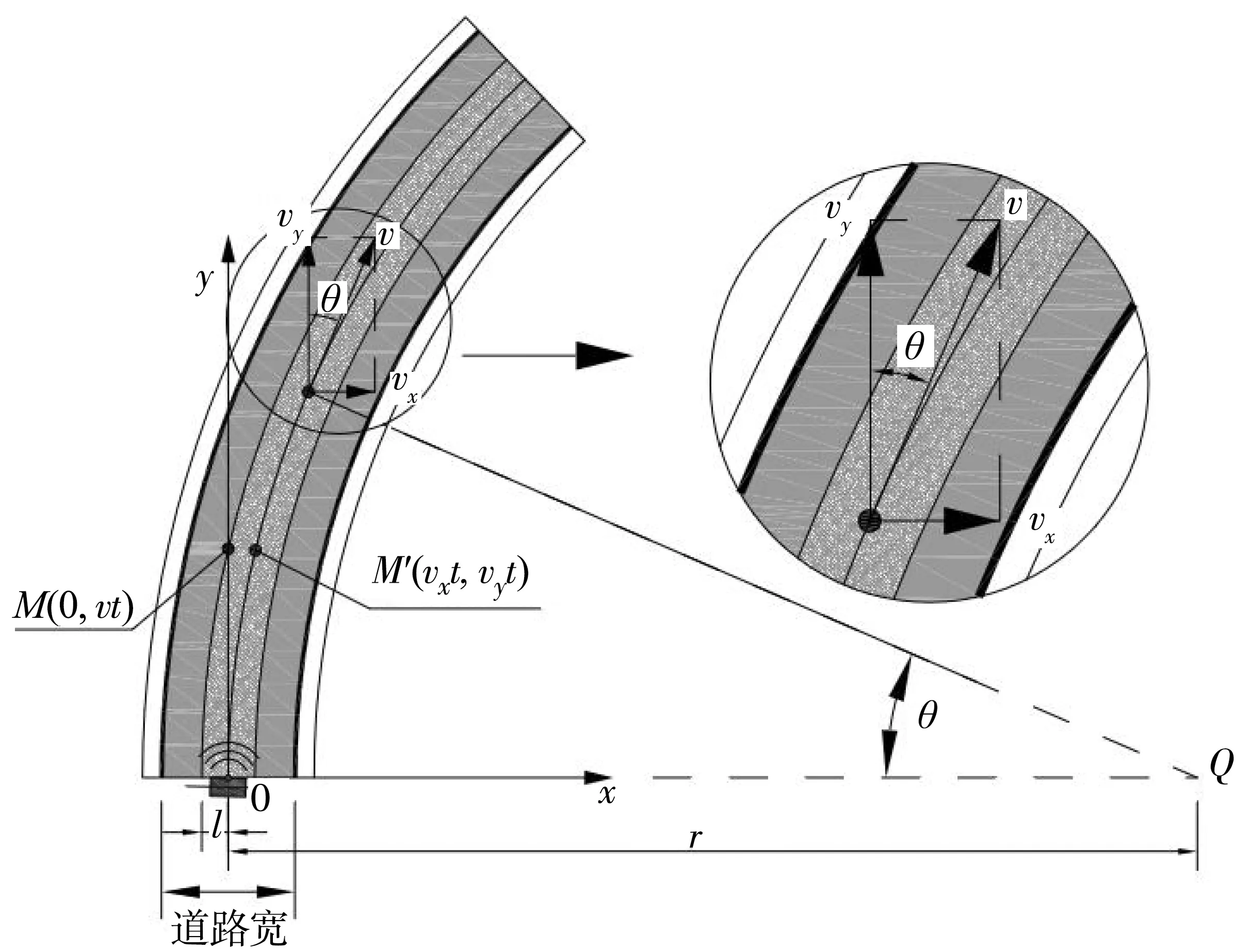
圖6 曲線路段偏離
道路中心線模型為:
(x-r)2+y2=r2
(6)
虛擬軌道安全范圍模型為:
(x-r)2+y2=(r±l)2
(7)
以汽車偏離虛擬軌道外側(cè)為例進(jìn)行分析,故左偏時(shí)虛擬軌道安全范圍模型為:
(x-r)2+y2=(r+l)2
(8)
假設(shè)在某一時(shí)刻汽車沿著y軸方向行駛,即沿著車身方向行駛,汽車行駛時(shí)間t后,汽車行駛到M點(diǎn),即偏離虛擬軌道中心線l時(shí),x=0,y=vt,帶入式(8)中得t為:
(9)
式(9)為偏離虛擬軌道的時(shí)間計(jì)算模型,汽車以θ角向曲線外側(cè)駛離虛擬軌道道路中心線,故汽車以y軸方向駛出虛擬軌道安全范圍需要時(shí)間t,與道路曲線半徑、汽車行駛速度及汽車駛出虛擬軌道道路中心線的最大距離有關(guān)。道路傳感器可按此時(shí)間間隔進(jìn)行布設(shè)。
3.2.2 偏離虛擬軌道預(yù)警距離模型建立
由圖6,將汽車此刻速度沿x軸和y軸分解為vx和vy,經(jīng)過時(shí)間t后,汽車的實(shí)際位置坐標(biāo)為M(0,vt),汽車的理論坐標(biāo)為M′(vxt,vyt)。則兩點(diǎn)之間的距離Δd為:
(10)
將式(9)帶入式(10)得:
(11)
由圖6分析可得:
(12)
因?yàn)?
vx2+vy2=v2
(13)
聯(lián)合式(12)和式(13)可得:
(14)

(r+a2)x2-2r2x+r2-a2=0
(15)
得式(15)二次方程的2個(gè)根為:
(16)
當(dāng)x1=1時(shí),vy=y,此時(shí)汽車行駛在直線路段上,故舍去x1。將x2帶入式(11)中得:
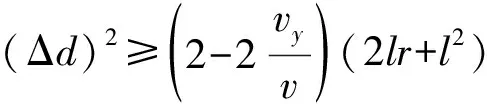
(Δd)2=(2-2x)(2lr+l2)
(17)
即:
(18)
式(18)為偏離虛擬軌道預(yù)警距離模型,當(dāng)車輛經(jīng)過時(shí)間t后實(shí)際位置與理論位置之間的間距大于Δd時(shí),汽車將駛離虛擬軌道安全范圍。以此作為界限,保證汽車行駛在虛擬軌道安全范圍內(nèi)。
超高速公路可以服務(wù)于無人駕駛汽車,汽車高速行駛在曲線路段的過程中,即使汽車會(huì)偏離原定道路中心線,也是以一個(gè)較小的角度偏離虛擬軌道,甚至駕駛員很難發(fā)現(xiàn)車輛正在偏離虛擬軌道道路中心線。
如圖7,若車輛不以垂直于曲線半徑方向發(fā)生偏離,以更小的角度(θ1)偏離虛擬軌道中心線,在經(jīng)過時(shí)間t后,從O點(diǎn)行駛到N點(diǎn),而不以垂直于曲線半徑方向發(fā)生偏離,此時(shí)經(jīng)過時(shí)間t后車輛還未超出虛擬軌道安全范圍,還需經(jīng)歷時(shí)間t′,車輛到達(dá)N′點(diǎn),車輛距離虛擬軌道中心線l,此時(shí)給予車輛警告信號(hào)采取相應(yīng)措施。
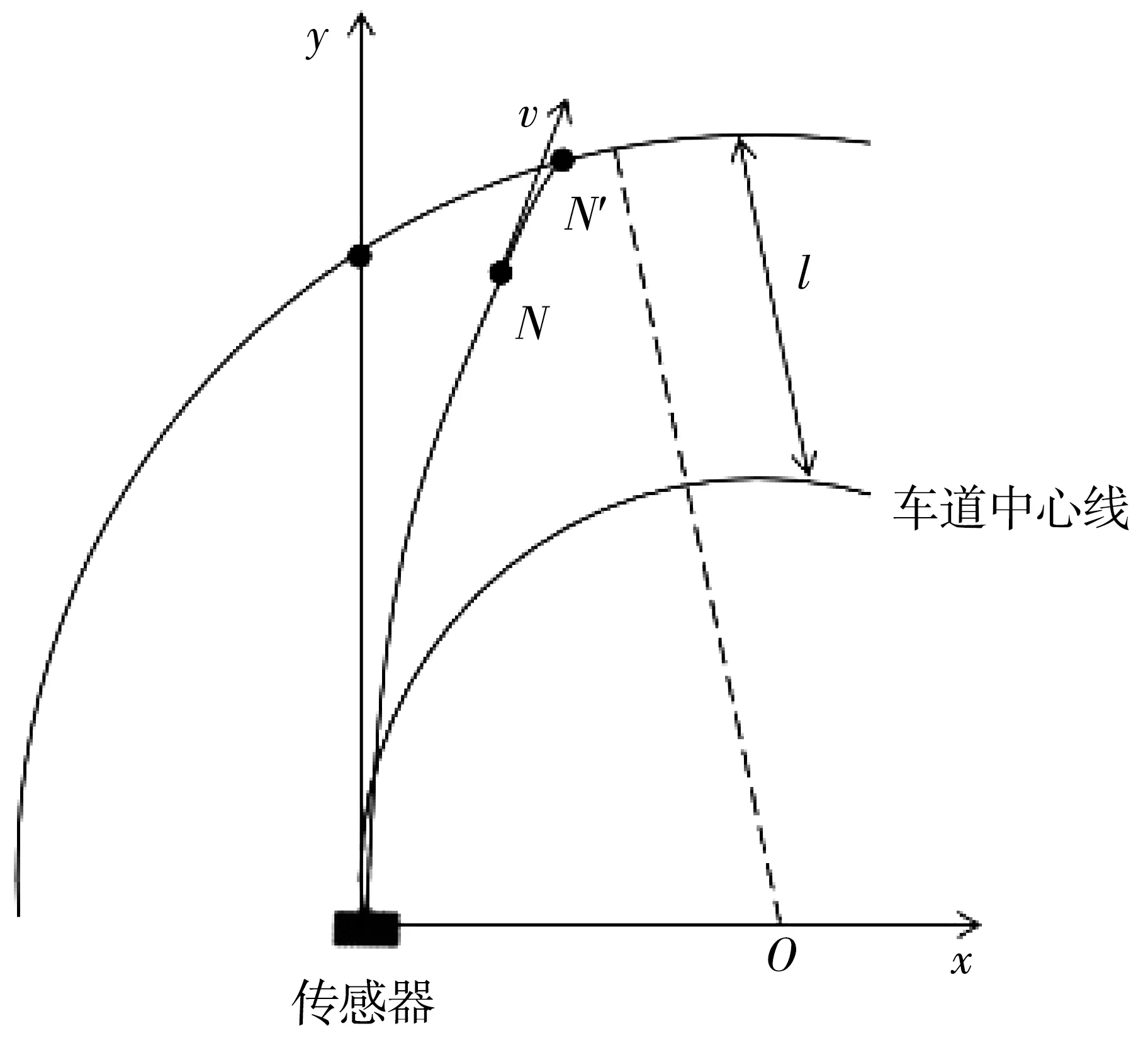
圖7 小角度偏離
故若以更小的角度發(fā)生偏離,所需時(shí)間更長,Δd值變大,故以式(18)做為判斷條件,都可保證車輛偏離虛擬軌道中心線的距離小于l。
4 模型分析驗(yàn)證
4.1 直線路段分析驗(yàn)證
假設(shè)道路傳感器安裝在路肩上,單車道寬為3.7 m,即a=1.85 m。借鑒文獻(xiàn)[15]研究結(jié)果,車輛沿虛擬軌道中心線行駛時(shí),一般認(rèn)為偏離中心線超過0.5 m才會(huì)影響到自身安全和其他車輛正常行駛。超高速公路虛擬軌道系統(tǒng)是將車輛限制在虛擬軌道安全范圍內(nèi)行駛,保證車輛不會(huì)駛離虛擬軌道安全閾值范圍,保證超高速公路行車的安全性。在JTG B01—2014《公路工程技術(shù)標(biāo)準(zhǔn)》中規(guī)定了小客車總寬為1.8 m,在單車道內(nèi)車輛還有較大橫向安全空間。故筆者在研究超高速公路虛擬軌道系統(tǒng)時(shí),考慮選取脫軌臨界值l1=0.50 m、l2=0.75 m、l3=1.00 m進(jìn)行研究。如圖8,假設(shè)當(dāng)車身偏離虛擬軌道中心線的距離l分別超過l1=0.50 m、l2=0.75 m、l3=1.00 m,達(dá)到脫軌的臨界值。將l和a值帶入式(3)和式(4)中得到汽車行駛在超高速公路直線路段,偏離虛擬軌道安全范圍時(shí)的預(yù)警信號(hào)值如表2。

圖8 直線路段偏離虛擬軌道
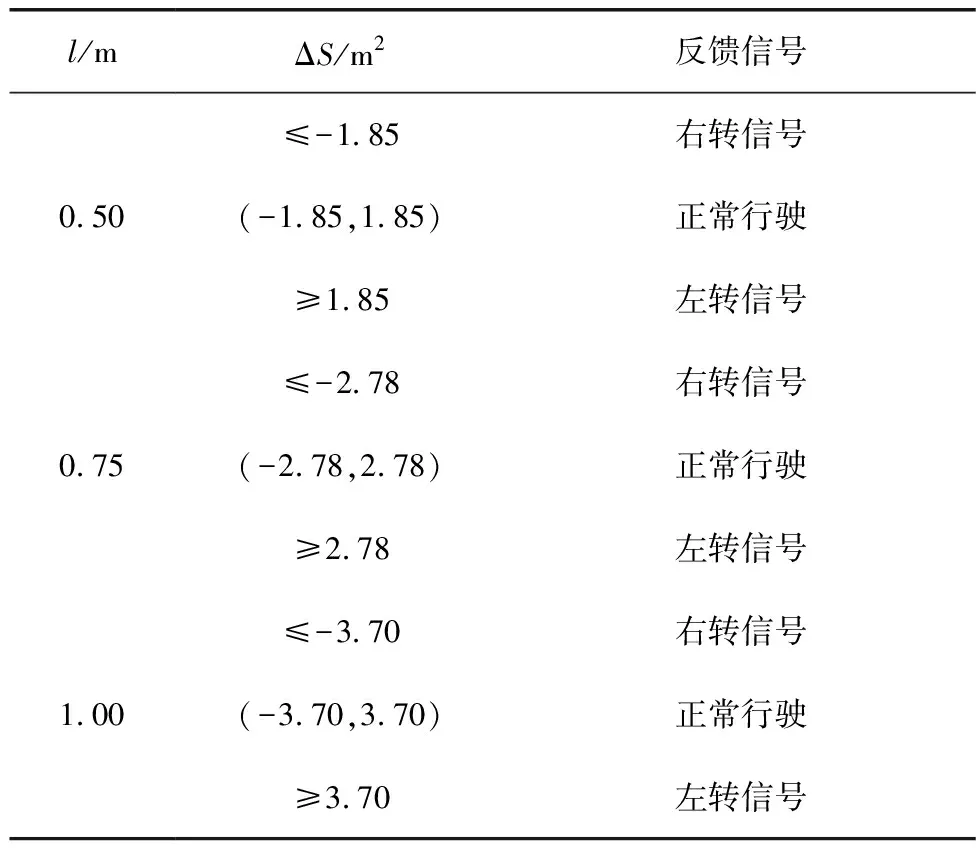
表2 直線路段預(yù)警信號(hào)
汽車行駛在直線路段上,當(dāng)偏離軌道中心線閾值為0.50 m時(shí),汽車信號(hào)器接收到反饋信息,信號(hào)器接收到ΔS≤-1.85或ΔS≥1.85時(shí),汽車做出相應(yīng)的轉(zhuǎn)向操作;當(dāng)偏離軌道中心線閾值為0.75 m時(shí),汽車信號(hào)器接收到反饋信息,信號(hào)器接收到ΔS≤-2.78或ΔS≥2.78時(shí),汽車做出相應(yīng)的轉(zhuǎn)向操作;當(dāng)偏離軌道中心線閾值為1.00 m時(shí),汽車信號(hào)器接收到反饋信息,信號(hào)器接收到ΔS≤-3.70或ΔS≥3.70時(shí),汽車做出相應(yīng)的轉(zhuǎn)向操作。
4.2 曲線路段分析驗(yàn)證
將傳感器每隔一段間距安裝在虛擬軌道中心線上。由式(9)可得,汽車行駛在曲線路段上時(shí),方向盤轉(zhuǎn)角以較大角度(速度方向)駛離虛擬軌道中心線時(shí),駛出虛擬軌道安全范圍所需要的時(shí)間與汽車行駛速度,曲線半徑及偏離虛擬軌道閾值相關(guān)。取一般最小半徑時(shí)的圓曲線路段進(jìn)行分析,偏離虛擬軌道的閾值分別取l1=0.50 m,l2=0.75 m,l3=1.00 m。
一般最小半徑是指各等級(jí)公路按設(shè)計(jì)速度行駛的車輛能保證其安全、舒適的最小一般圓曲線半徑。JTG B01—2014《公路工程技術(shù)標(biāo)準(zhǔn)》中普通高速公路一般最小半徑值是按超高值ih=6%~8%,橫向力系數(shù)μ=0.05~0.06計(jì)算取整得到,并給出了計(jì)算公路圓曲線最小半徑,當(dāng)v=100 km/h和v=120 km/h時(shí),取μ=0.05,ih=0.06。徐金良等[22]在計(jì)算最小圓曲線半徑和不設(shè)超高最小半徑時(shí),參照J(rèn)TGB01—2014《公路工程技術(shù)標(biāo)準(zhǔn)》中規(guī)定的超高值和橫向力系數(shù)值計(jì)算。張玥[23]在計(jì)算一般最小半徑時(shí),當(dāng)v=100、v=120 km/h時(shí),取值μ=0.05,和標(biāo)準(zhǔn)中取值相近。通過借鑒JTGB01—2014《公路工程技術(shù)標(biāo)準(zhǔn)》、文獻(xiàn)[22]和文獻(xiàn)[23],取表3所示參數(shù)ih=6%~10%、μ=0.04~0.06,分別計(jì)算得到圓曲線一般最小半徑值。

表3 圓曲線一般最小半徑
以超高6%、8%和10%的平均值ih=8%為例,計(jì)算得到汽車駛離虛擬軌道所需時(shí)間,即道路傳感器布設(shè)的時(shí)間間隔如表4。

表4 圓曲線取一般最小半徑汽車駛離虛擬軌道所需時(shí)間
由表4得,隨著虛擬軌道安全閾值的增大,汽車駛離虛擬軌道中心線所需時(shí)間更久,道路傳感器的布設(shè)間距更大。
由式(18)得知,汽車行駛在曲線路段上時(shí),判斷汽車駛離虛擬軌道中心線的條件與曲線半徑、虛擬軌道安全閾值有關(guān)。由于曲線半徑遠(yuǎn)大于安全閾值l,故經(jīng)過化簡得:
(19)
偏離虛擬軌道的閾值分別取l1=0.50 m,l2=0.75 m,l3=1.00 m,計(jì)算得到汽車行駛在曲線路段上時(shí)超出虛擬軌道安全范圍的預(yù)警信號(hào)值Δd,如表5。

表5 駛離虛擬軌道中心線判斷值
5 結(jié) 論
通過建立虛擬軌道模型,分別計(jì)算和分析了超高速公路直線路和曲線路段上保證車輛行駛在虛擬軌道安全范圍內(nèi)的閾值,研究結(jié)論如下:
1)當(dāng)汽車行駛在超高速公路直線路段上時(shí),理論距離與傳感器檢測距離的平方之差的絕對(duì)值|ΔS|<1.85 m2,|ΔS|<2.78 m2,|ΔS|<3.70 m2,就可保證車輛偏離中心線的距離分別小于0.50、0.75、1.00 m。
2)當(dāng)汽車行駛在超高速公路曲線路段上,超高速公路設(shè)計(jì)速度分別為180、160、140、120、100 km/h時(shí),道路傳感器間的距離分別小于46.5、41.3、34.6、30.0、24.4 m,即可保證車輛偏離中心線的距離小于0.50 m;當(dāng)?shù)缆穫鞲衅鏖g的距離分別小于57.0、50.7、43.2、36.7、30.0 m,即可保證車輛偏離中心線的距離小于0.75 m;當(dāng)?shù)缆穫鞲衅鏖g的距離分別小于65.5、58.2、49.0、42.3、34.7 m,即可保證車輛偏離中心線的距離小于1.00 m。
3)偏離虛擬軌道的閾值分別取l1=0.50 m,l2=0.75 m,l3=1.00 m時(shí),預(yù)警信號(hào)值Δd為2、3、4 m可保證車輛不超過虛擬軌道安全閾值。
筆者構(gòu)建的虛擬軌道模型,為發(fā)展安全的超高速公路提供保障,同樣為目前車道保持系統(tǒng)及智慧交通的發(fā)展提供借鑒。隨著我國超高速公路及自動(dòng)駕駛領(lǐng)域的發(fā)展,研究成果可保證車輛在超高速公路虛擬軌道安全范圍內(nèi)行駛,為建設(shè)具有安全保障的超高速公路提供依據(jù)。在未來的工作中,將考慮5G和傳感器失效情況下解決虛擬軌道安全駕駛的問題。隨著超高速公路的不斷建設(shè)施工且投入運(yùn)營,研究團(tuán)隊(duì)將進(jìn)一步進(jìn)行結(jié)合實(shí)車試驗(yàn)來驗(yàn)證虛擬軌道模型的準(zhǔn)確性和安全性。
猜你喜歡
建材發(fā)展導(dǎo)向(2021年20期)2021-11-20 05:43:18
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
小學(xué)閱讀指南·低年級(jí)版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2016年9期)2016-06-06 07:42:10
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
