超大型數控滾子砂帶拋光機結構研究
2023-10-10 08:59:16王玉峰
河南科技 2023年17期
王玉峰
(濮陽技師學院,河南 濮陽 457000)
0 引言
目前,國內圓錐圓柱滾子表面精加工是通過外徑超精和滾子球基面磨削來實現的。滾子超精機超精出帶修正線的全凸或半凸滾子要采用專門設計的超精導輥,磨損快,且工裝修磨工藝復雜,成本高。而球基面磨削受限于滾子尺寸,一般滾子直徑都在50 mm 以下,且僅適用于圓錐滾子的基礎面超精。中小型圓柱滾子端面磨削多采用雙端面磨床,由于送料盤直徑大、厚度薄等,雙端面磨床不適宜特大尺寸滾子的加工[1]。隨著大型、特大型軸承加工對旋轉精度和轉速要求的日益提高,作為滾動軸承中最重要部件的滾動體,對其技術要求也越來越高[2]。而對超大型圓錐圓柱滾子(滾子直徑為65~170 mm、長度為60~230 mm)的精加工一直是國內滾子加工的薄弱環節,國產成熟設備處于空白期。經充分的市場調研與工藝技術分析,研發設計出數控超大型滾子外徑及端面砂帶拋光機,突破該技術的成功開發。
1 總體結構布局
機床總體布局如圖1 所示。該機床主要用于外徑為60~170 mm、長度為60~230 mm 、滾子全錐角為0°~24°范圍內的圓錐圓柱滾子砂帶超精加工,適用于采用硬車或磨削后進行砂帶超精加工的生產工藝。在一臺設備上,可同時實現對圓錐或圓柱滾子外徑、圓錐滾子球基面和圓柱滾子雙端面的超精加工。該機床采用四超頭雙工位布局,左工位為滾子端面砂帶超精,兩邊各布置一個水平前后振蕩,且上下往復行走的超精頭;右工位為滾子外徑砂帶超精。端面拋光采用單砂帶水平方向前后小振蕩加垂直方向上下砂帶大往復超精原理;外徑拋光原理采用雙砂帶,粗、精超兩步法設計,砂帶工作時沿滾子側母線左右小振蕩的同時,進行左右大往復進給外徑拋光。外徑超精頭整體可旋轉角度[3]。

圖1 機床總體布局
滾子端面拋光過程如下。機床啟動—機器人或人工上料—左工位滾子到位—壓緊機構伺服定位—壓緊機構尾座液壓夾緊—左工位工件驅動裝置旋轉—左工位砂帶垂直(左右兩端面)進給—左工位砂帶壓緊(左右兩端面)—端面砂帶振蕩—端面拋光—端面拋光結束—左壓緊機構尾座松壓—左壓緊機構伺服退回—工件落入工件輸送帶—砂帶鎖緊氣缸退回—砂帶更新—端面拋光循環結束。
滾子外徑拋光過程如下。機器人或人工上料—右工位工件到位—壓緊機構伺服定位—壓緊機構尾座液壓夾緊—右工位工件驅動裝置旋轉—右工位外徑砂帶垂直進給—右工位粗砂帶壓緊—外徑砂帶往復—外徑粗拋光砂帶松壓—外徑粗拋光結束—外徑粗拋光砂帶鎖緊氣缸退回—外徑粗拋光砂帶更新—右工位細砂帶壓緊—外徑砂帶往復—外徑細拋光松壓—外徑細拋光結束—右壓緊機構尾座松壓—右壓緊機構伺服退回—外徑細拋光砂帶鎖緊氣缸退回—外徑細拋光砂帶更新—外徑拋光循環結束。
2 滾子的夾緊與轉動
該機床配置兩套滾子驅動單元,分別位于床身的左前方和右前方(見圖1)。該技術充分利用大直徑滾子中心有通孔、兩端面都留有中心孔和不需要精加工下沉端面的工藝特點。為適應單個滾子的夾緊與驅動,采用兩頂尖定位夾緊,夾緊力由液壓伺服比例閥控制,可根據滾子尺寸及重量進行無級調節。滾子定位左端驅動殼體固定在床身上,尾頂尖座體安裝在液壓和伺服聯合驅動的頂尖移動拖板上。由伺服電機驅動滾珠絲杠來快速實現拖板的大行程精確預定位,頂尖到達預定位置后,安裝在絲杠螺母上的液壓缸啟動,將右頂尖向左推進,實現對滾子的定位夾緊。同時可通過液壓系統的伺服比例閥來精確設定對滾子的夾緊力大小。該機床中優先選用夾緊力范圍與滾子尺寸的對應關系見表1。

表1 砂帶拋光機滾子夾緊力與滾子尺寸對應關系
滾子驅動力由左頂尖周邊伸出的四個彈性驅動銷與滾子左端凹平面間的摩擦力和兩頂尖孔的摩擦力提供,四個彈性驅動銷的伸縮由工件軸上的旋轉液壓缸來提供動力。結構設計上,利用滾子端面凹平面空間結合驅動力來選擇頂尖型號及驅動銷的大小,滾子選用驅動銷直徑為6 mm,頂尖選用4號錐頂尖。優先選用驅動力范圍與滾子尺寸對應關系見表2。滾子夾緊及旋轉驅動結構如圖2所示。

表2 滾子旋轉驅動力與滾子尺寸對應關系

圖2 滾子的夾緊與驅動結構
3 滾子端面的砂帶超精加工機構
圓柱滾子的兩端均為平面超精加工,要控制好砂帶上下往復的工藝參數,保證中間不發生凹陷即可。可采用小振蕩大往復原理及多段拼接行程,分別設置各段往復次數及速度。由于去除材料與振蕩頻率、砂帶壓力及砂帶接觸時長成正相關,需要通過壓力自動調節、往復行程與分段伺服自動控制及振蕩頻率伺服調節,對每一個類型的滾子設計出一個特殊的超精加工程序。由于設備配套有多伺服自動控制系統,完全可滿足單個滾子球基面的超精加工。在機械結構設計上,必須保證砂帶在大水平方向上產生振蕩、豎直方向上進行往復,壓帶板在做前后振蕩運動的同時,做上下往復運動。振蕩頻率和振幅可調,往復運動由伺服電機驅動滾珠絲杠實現自動控制。
4 滾子外徑的砂帶超精加工機構
整體外徑超精機構如圖3 所示。外徑砂帶機械底座固定在床身右后方位置,砂帶回轉板安裝在底座前側,回轉板安裝在上下拖板上,上下拖板外側還安裝有水平左右移動拖板,砂帶更新機構安裝在左右拖板外側。對于圓柱滾子,外徑側母線為全凸或半凸的修正線超精加工,同樣采用小振蕩大往復原理及多段拼接行程,各段往復次數及速度分別設置的方法。由于去除材料與振蕩頻率、砂帶壓力及砂帶接觸時長成正相關,需要通過壓力自動調節、往復行程與分段伺服自動控制及振蕩頻率伺服調節,對每一個類型的滾子驗證出一個特殊的超精加工程序。在對滾子進行外徑超精加工時,選用200目粗砂帶來去除材料和側母線塑形,再選用500目細砂帶來提高滾子外表面的光潔度,通過雙砂帶的程序控制,既實現了形狀可控,又實現了精度可控[4-5]。
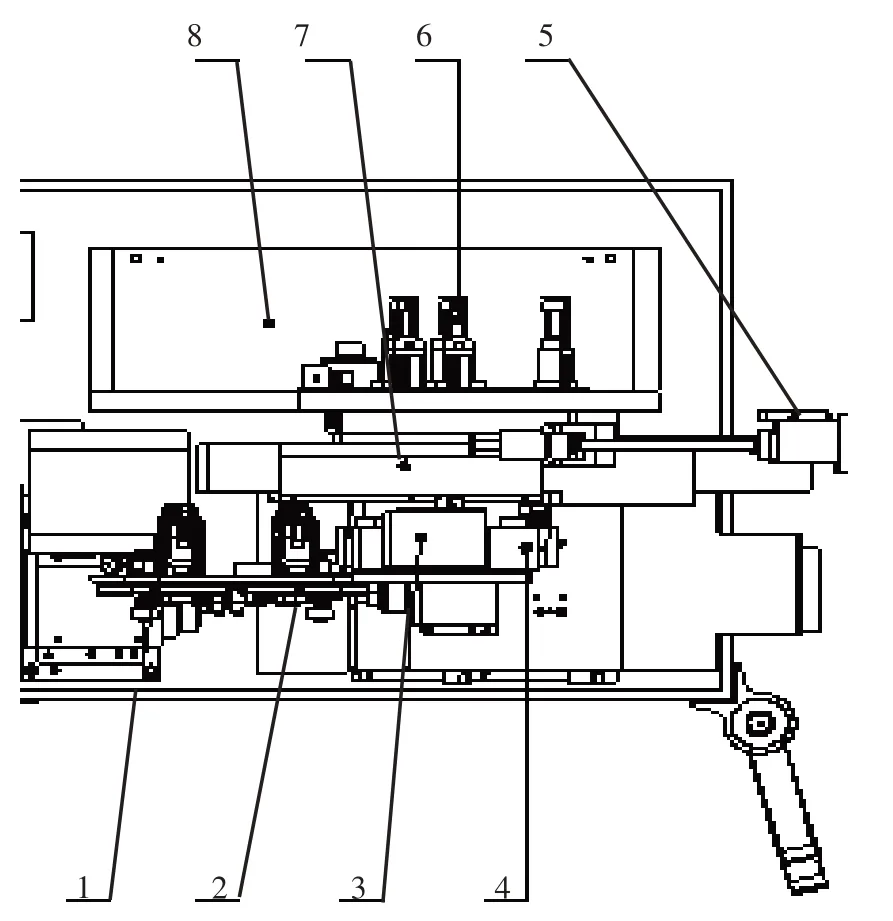
圖3 外徑砂帶超精機構
對于圓錐滾子,由于外圓側母線帶有傾角,如果砂帶頭不能調整角度的話,理論上會造成砂帶因滾子外圓接觸面減小而成為一個線接觸。為適應不同錐角的滾子,在砂帶振蕩機構后方增設一層回轉板,可在0°~30°自由轉換,轉角調整采用全自動控制。具體結構設計如下。①回轉板可以繞固定回轉軸旋轉,鎖緊梯形螺母與液壓缸的活塞穩定連接,液壓驅動回轉板的鎖緊與解鎖狀態;②回轉板解鎖后,由伺服電機帶動絲杠,絲杠螺母通過鉸鏈機構與回轉板連接為一體,可通過伺服電機帶動精密滾珠絲杠來精密控制回轉板的旋轉角度變動量;③回轉板相對基準零位的實際偏轉值則由安裝在回轉中心上的角度編碼器實時讀取,再將角度數值反饋到機床數控系統中與設定角度值進行比對。當實際角度值與設定角度值吻合時,砂帶轉角驅動電機停止轉動,轉角鎖緊液壓缸鎖緊,角度調整,保證外徑超精的壓帶輪側母線與滾子外圓側母線平行。
5 砂帶自動更新機構
砂帶自動更新機構(如圖4 所示)決定著超精加工是否能進行自動循環加工。首先,要解決砂帶漲緊的問題。在超精加工過程中要保證與工件接觸的砂帶處于一個穩定狀態,不能自由移動。為解決這個問題,在循環機構中增設砂帶導向輪、斷帶檢測、砂帶鎖緊氣缸,同時給壓帶氣缸預留一定行程,保證砂帶始終與工件表面接觸。另外,在砂帶循環方向上,保證工件的旋轉帶給砂帶的摩擦力與砂帶收緊力方向一致。當砂帶的出帶端被鎖緊氣缸鎖緊時,砂帶與工件旋轉引起的摩擦力只會讓砂帶處于脹緊狀態,而不會松弛。其次,解決砂帶磨損后的自動更新問題。超精加工過程中砂帶會磨損,要定時定量更新。為方便程序控制,結構設計中選用帶抱閘功能的伺服電機驅動收帶盤,在編制程序時,通過伺服電機的計數功能來計算收帶盤旋轉的轉數,再通過轉數及砂帶的厚度來計算砂帶盤外徑的增加值。隨著砂帶盤收帶后砂帶盤直徑的增加而減小一次收帶的轉角,最終實現砂帶更新量的自動調整與控制。
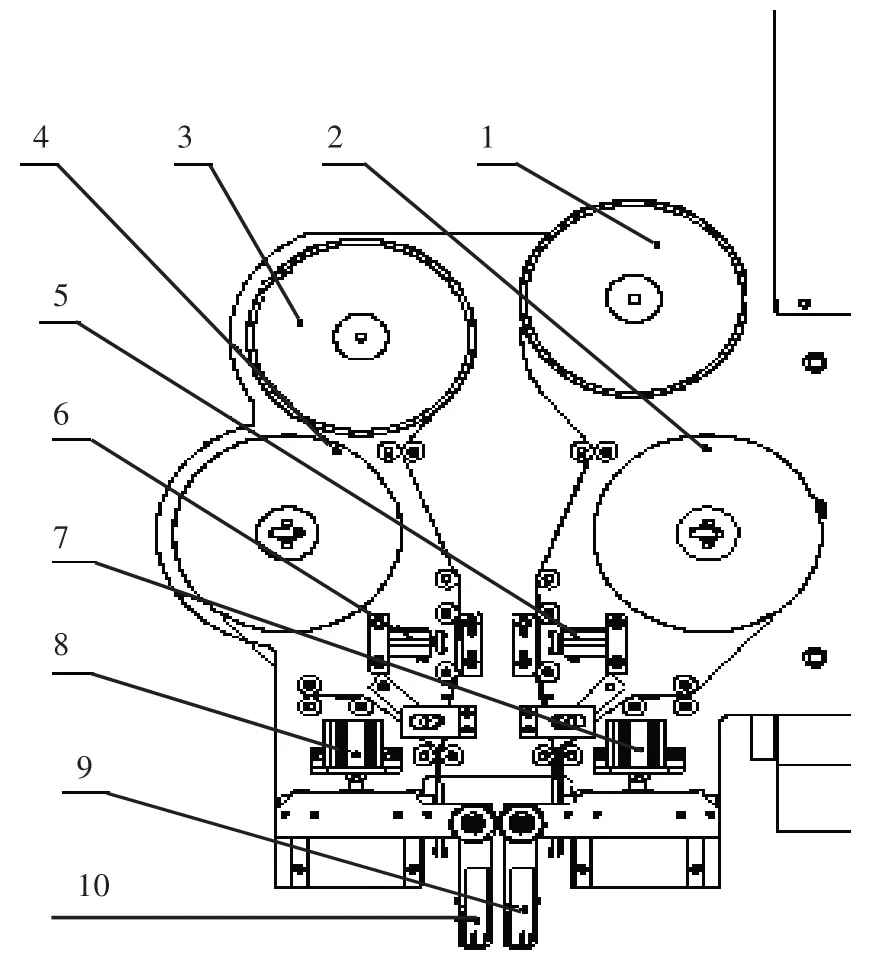
圖4 砂帶自動更新機構
6 設備超精加工數據分析
通過在該機床上對滾子進行精加工,并對滾子的表面質量進行分析,加工前后技術比較分析結果見表3。在超精加工階段,沒有大的切削力和電磁夾緊,不會帶來內部損傷。主要對外觀、圓度、輪廓度和表面粗糙度進行驗收。在外觀上,由于砂帶目數選擇合理,加工后的滾子色澤均勻。通過對工藝進行參數化處理,可方便調出客戶想要的交叉紋理。在指定精密輪廓儀和粗糙度儀上經多次驗證,測定重點關注的精度指標完全符合高端客戶對精度的要求,且還具有10%以上的精度富余。

表3 超精加工前后滾子主要技術參數比較
7 結語
數控超大型滾子外徑及端面砂帶拋光機研發的成功,是國內超大型滾子軸承制造企業提高生產效率和產品質量、降低進口成本的重要基礎。本研究從硬件設備關鍵技術研發、多功能復合配置,軟件系統的選型及二次開發到加工產品精度檢測與提高工藝研究等環節入手,得到大量的基礎性研發數據和多項技術突破。通過研究,提高了理論水平,完善了設計理念。產品研制過程能豐富產業化實踐能力,也使得工藝路線得到充分的實踐檢驗。
