電磁軌道炮導(dǎo)軌身管系統(tǒng)動(dòng)力學(xué)分析
2023-10-14 01:00:56江鎮(zhèn)宇于海龍
彈道學(xué)報(bào) 2023年3期
江鎮(zhèn)宇,于海龍,何 斌,靳 展
(南京理工大學(xué) 發(fā)射動(dòng)力學(xué)研究所,江蘇 南京 210094)
電磁軌道炮發(fā)射過(guò)程中,伴隨著電樞的高速運(yùn)動(dòng),復(fù)雜環(huán)境載荷將會(huì)對(duì)裝備造成多場(chǎng)耦合、超強(qiáng)瞬態(tài)、幅值巨大的沖擊作用[1-2]。為了設(shè)計(jì)出既能保證樞軌間有足夠的接觸力,又能保證不會(huì)因溫度過(guò)高、受力過(guò)大而導(dǎo)致系統(tǒng)結(jié)構(gòu)破壞,研究發(fā)射狀態(tài)下的導(dǎo)軌身管發(fā)射裝置動(dòng)力學(xué)非常必要。
多體系統(tǒng)傳遞矩陣法(multibody system transfer matrix method,MSTMM)是近二十多年來(lái)提出并不斷完善的一種多體系統(tǒng)動(dòng)力學(xué)數(shù)值計(jì)算方法。利用MSTMM對(duì)多體系統(tǒng)動(dòng)力學(xué)進(jìn)行數(shù)值計(jì)算時(shí)無(wú)需建立系統(tǒng)總體動(dòng)力學(xué)方程,所涉及的矩陣階次與系統(tǒng)的自由度數(shù)無(wú)關(guān),可顯著提高多體系統(tǒng)動(dòng)力學(xué)數(shù)值計(jì)算效率,為復(fù)雜機(jī)械系統(tǒng)動(dòng)力學(xué)的快速數(shù)值分析與優(yōu)化設(shè)計(jì)帶來(lái)了方便[3]。本文采用MSTMM求解電磁軌道炮系統(tǒng)導(dǎo)軌身管的振動(dòng)特性及動(dòng)態(tài)響應(yīng)。
為了保證電磁軌道炮的射擊精度,發(fā)射過(guò)程中軌道的位移要控制在一定范圍內(nèi)。目前,研究人員對(duì)于電磁炮系統(tǒng)建模與數(shù)值仿真主要聚焦于電磁炮的發(fā)射機(jī)理,因此主要仿真分析電樞軌道或者電樞線(xiàn)圈系統(tǒng)。TZENG等[4]將軌道建模為彈性地基上的歐拉梁模型;劉文等[5]利用分離變量法和計(jì)入阻力的拉格朗日方程,推導(dǎo)出軌道受任意指數(shù)函數(shù)磁壓力的控制方程的解析解;文獻(xiàn)[6]給出了軌道的機(jī)電耦合動(dòng)力學(xué)方程,分析了軌道對(duì)運(yùn)行電磁力的強(qiáng)迫響應(yīng);LEE等[7]利用彈性基礎(chǔ)上的Timoshenko梁模型分析了電磁炮軌道在移動(dòng)電樞和電磁力作用下的動(dòng)態(tài)響應(yīng);田振國(guó)[8]得到發(fā)射狀態(tài)下復(fù)合導(dǎo)軌的動(dòng)態(tài)響應(yīng),分析發(fā)現(xiàn)電樞壓力對(duì)軌道變形的影響遠(yuǎn)大于軌道間斥力的影響;CHE等[9]建立了電磁炮軌道在不同約束條件和預(yù)緊力作用下的三維有限元模型,討論了不同約束和預(yù)緊力對(duì)固有頻率、振形函數(shù)的影響;XU等[10-11]建立了軌道炮系統(tǒng)機(jī)電耦合參數(shù)振動(dòng)方程,發(fā)現(xiàn)隨著動(dòng)態(tài)電流幅值和電樞與炮口距離的增大,系統(tǒng)振動(dòng)的不穩(wěn)定區(qū)域增大;蔡喜元[12]將軌道炮發(fā)射身管簡(jiǎn)化為彈性基礎(chǔ)上雙層歐拉梁模型,分析了不同結(jié)構(gòu)參數(shù)和材料性能對(duì)身管振動(dòng)特性的影響機(jī)理;DU等[13-14]基于彈性基礎(chǔ)上的歐拉梁理論提出了考慮彈丸運(yùn)動(dòng)的軌道振動(dòng)模型,給出了樞軌動(dòng)態(tài)電磁接觸力的解析模型;ZHANG[15-16]利用非線(xiàn)性有限元模型研究電磁軌道炮導(dǎo)軌的動(dòng)態(tài)特性,詳細(xì)分析了脈沖電源參數(shù)和軌道尺寸對(duì)電磁軌道炮性能的影響;LU[17]分析了連續(xù)放電和連續(xù)發(fā)射條件下導(dǎo)軌的內(nèi)彈道性能,確定了軌道的動(dòng)態(tài)響應(yīng)不受上一次發(fā)射的影響的發(fā)射間隔為1 s;何威等[18]求解了懸臂式雙層彈性基礎(chǔ)梁模型在電磁力和電樞力作用下的位移和應(yīng)力的解析解,并用ANSYS數(shù)值分析結(jié)果驗(yàn)證了解析解的正確性;沈劍[19-20]基于Timoshenko梁建立了電磁炮發(fā)射過(guò)程的彈炮剛?cè)狁詈隙囿w動(dòng)力學(xué)模型,獲得了在考慮身管和導(dǎo)軌柔性變形時(shí)超高速?gòu)椡杼艃?nèi)的基本動(dòng)力學(xué)特性。
目前建立的電磁軌道炮導(dǎo)軌身管模型大多忽略了上下導(dǎo)軌結(jié)構(gòu)實(shí)際情況中的非對(duì)稱(chēng)性,同時(shí)將導(dǎo)軌外支撐身管簡(jiǎn)化為邊界條件,與實(shí)際情況有一定差異。本文考慮上下導(dǎo)軌彈性支撐參數(shù)、空間位置及力學(xué)參數(shù)非對(duì)稱(chēng)性的影響,將上下兩根導(dǎo)軌視為平面橫向振動(dòng)的梁,導(dǎo)軌至軌道炮外層的其余部分視為兩彈性支撐作用下的橫向振動(dòng)梁,三梁之間通過(guò)分布彈性作用耦合;電路電源提供的脈沖電流在樞軌求解域內(nèi)傳導(dǎo)并感應(yīng)出磁場(chǎng),利用畢奧-薩伐爾定律獲得域內(nèi)電磁規(guī)律,進(jìn)而得到導(dǎo)軌-導(dǎo)軌及導(dǎo)軌-電樞間的電磁力;利用MSTMM,以電磁力為激勵(lì)源,推導(dǎo)三梁模型系統(tǒng)的動(dòng)力學(xué)方程,利用模態(tài)疊加法求解導(dǎo)軌身管系統(tǒng)在重力及時(shí)變電磁力作用下的動(dòng)態(tài)響應(yīng)。
1 導(dǎo)軌身管振動(dòng)特性
1.1 導(dǎo)軌身管系統(tǒng)振動(dòng)模型
典型電磁軌道炮身管橫截面如圖1所示。電磁軌道炮炮身一般由上下導(dǎo)軌、封裝、支撐體、填充體和復(fù)合材料組成。將外層復(fù)合材料、封裝、填充體和支撐體合稱(chēng)為身管。為了便于分析,做如下基本假設(shè):

圖1 某型電磁軌道炮炮身橫截面示意圖Fig.1 Schematic diagram of the cross-section of a certain type of electromagnetic railgun barrel
①由于通常導(dǎo)軌和身管的長(zhǎng)細(xì)比較大(長(zhǎng)度與特征寬度之比大于150),假設(shè)將其建模為Euler-Bernoulli梁,忽略橫向剪切變形的影響;
②由于封裝的緊密支撐,忽略導(dǎo)軌身管的軸向位移;
③將導(dǎo)軌與身管間的彈性相互作用視為分布彈簧;
④考慮實(shí)際系統(tǒng)上下導(dǎo)軌結(jié)構(gòu)的非對(duì)稱(chēng)性。
將導(dǎo)軌身管系統(tǒng)按照連接狀態(tài)分為五部分,以一體化發(fā)射單元的運(yùn)動(dòng)方向作為系統(tǒng)各部分之間的傳遞方向,根據(jù)多體系統(tǒng)傳遞矩陣法“體”和“鉸”統(tǒng)一編號(hào)的原則,地面邊界編號(hào)為0,系統(tǒng)各部分依次從1到5進(jìn)行編號(hào)。上下導(dǎo)軌與身管間的支撐體看作是分布彈簧,將地面支撐視為作用在身管特定位置處的彈性支撐力,建立電磁軌道炮導(dǎo)軌身管三梁發(fā)射動(dòng)力學(xué)模型,如圖2所示。圖中,m1,m2,m3分別為上導(dǎo)軌、身管、下導(dǎo)軌的線(xiàn)質(zhì)量;E1I1,E2I2,E3I3分別為上導(dǎo)軌、身管、下導(dǎo)軌的橫截面抗彎剛度;L1,L2,L3分別為系統(tǒng)第一部分、第二部分、第三部分的長(zhǎng)度;y1(x,t),y2(x,t),y3(x,t)分別為上導(dǎo)軌、身管、下導(dǎo)軌的撓度;k1為上導(dǎo)軌與身管間彈性剛度;k2為下導(dǎo)軌與身管間彈性剛度;k3為身管與地面間支撐剛度。

圖2 某型電磁軌道炮導(dǎo)軌身管三梁發(fā)射動(dòng)力學(xué)模型Fig.2 Launch dynamics model of a certain type of electromagnetic railgun rail barrel
1.2 導(dǎo)軌身管系統(tǒng)傳遞矩陣
選取模型中每根梁物理坐標(biāo)下的狀態(tài)矢量為(yθzmzqy)T。y為橫向位移在慣性系中的坐標(biāo),θz為軸線(xiàn)繞z軸的角位移,mz為橫截面所受彎矩,qy為橫截面所受剪力。無(wú)阻尼自由振動(dòng)導(dǎo)軌身管系統(tǒng)的響應(yīng)可由模態(tài)疊加求解,若某階模態(tài)下系統(tǒng)固有頻率為ω,則對(duì)應(yīng)狀態(tài)矢量可表示為
(1)
式中:Y,Θz,Mz,Qz為模態(tài)坐標(biāo)下的狀態(tài)矢量,分別對(duì)應(yīng)物理坐標(biāo)下的狀態(tài)矢量;下標(biāo)j=1,2,3,分別代表上導(dǎo)軌、身管和下導(dǎo)軌。則導(dǎo)軌身管系統(tǒng)對(duì)應(yīng)模態(tài)坐標(biāo)下的全部狀態(tài)矢量可定義為
Z=(Y1Θz1Mz1Qy1Y2Θz2Mz2
Qy2Y3Θz3Mz3Qy3)T
(2)
系統(tǒng)1,3,5部分導(dǎo)軌身管橫向自由振動(dòng)微分方程為
(3)
由材料力學(xué)關(guān)系,可得:
(4)
將式(3)和式(4)整理成矩陣形式:

(5)
矩陣A的表達(dá)式為

根據(jù)式(5)的解,輸入端狀態(tài)矢量ZI與輸出端狀態(tài)矢量ZO之間的傳遞方程,可寫(xiě)為
ZO=eAxZI=UZI
則系統(tǒng)1,3,5部分的傳遞矩陣為
U1=U3=U5=U=eAx
(6)
系統(tǒng)2,4部分對(duì)應(yīng)的虛擬元件僅與身管發(fā)生相互作用,其彈性點(diǎn)支撐的傳遞矩陣可寫(xiě)為
(7)
導(dǎo)軌身管系統(tǒng)總傳遞矩陣可通過(guò)系統(tǒng)各部分的傳遞矩陣按照傳遞方向依次連乘得到,系統(tǒng)輸入端狀態(tài)矢量ZI1,系統(tǒng)輸出端狀態(tài)矢量ZO5,由總傳遞矩陣可得系統(tǒng)總傳遞方程為
ZO5=U5U4U3U2U1ZI1=UallZI1
(8)
導(dǎo)軌身管系統(tǒng)自由端邊界條件為
(9)
將三梁系統(tǒng)兩端邊界條件(9)代入系統(tǒng)總傳遞方程(8),求得系統(tǒng)在兩端自由狀態(tài)時(shí)的固有頻率,進(jìn)而得到各階頻率下輸入端完整的狀態(tài)矢量,利用系統(tǒng)各部分的傳遞矩陣,便可求得在對(duì)應(yīng)頻率下系統(tǒng)任意位置的狀態(tài)矢量。
2 導(dǎo)軌身管系統(tǒng)動(dòng)態(tài)響應(yīng)
在電磁發(fā)射過(guò)程中,導(dǎo)軌受到時(shí)變電磁載荷和電樞移動(dòng)載荷作用,本節(jié)將采用增廣特征矢量和系統(tǒng)的固有振動(dòng)特性,建立導(dǎo)軌身管系統(tǒng)在外界激勵(lì)下的動(dòng)力學(xué)方程,研究系統(tǒng)動(dòng)態(tài)響應(yīng)。
2.1 模態(tài)疊加法
電磁軌道炮導(dǎo)軌身管系統(tǒng)體動(dòng)力學(xué)方程為
Mvtt+Kv=F
(10)
式中:M=diag(M1,M2,M3);K=diag(K1,K2,K3),v=(v1v2v3)T,F=(F1F2F3)T。M,K為增廣算子;v為導(dǎo)軌身管系統(tǒng)位移坐標(biāo)列陣;F為導(dǎo)軌身管系統(tǒng)所受外力列陣;Mi,Ki,vi,Fj(j=1,2,3)分別為上導(dǎo)軌、身管、下導(dǎo)軌的質(zhì)量參數(shù)矩陣、剛度參數(shù)矩陣、位移列陣、外力(含外力矩)列陣。
定義導(dǎo)軌身管系統(tǒng)的增廣特征矢量為系統(tǒng)線(xiàn)位移列陣所對(duì)應(yīng)的模態(tài)坐標(biāo)列陣,即增廣特征矢量V為
(11)
式中:上標(biāo)k為模態(tài)階數(shù)。
由于導(dǎo)軌身管系統(tǒng)三梁動(dòng)力學(xué)模型是由連續(xù)體元件構(gòu)成,所以對(duì)應(yīng)的增廣特征矢量Vk的元素應(yīng)包含系統(tǒng)各階固有頻率所對(duì)應(yīng)的模態(tài)。利用增廣特征矢量Vk,導(dǎo)軌身管系統(tǒng)動(dòng)力響應(yīng)可表示為
(12)
式中:qk(t)為k階模態(tài)下的廣義坐標(biāo)。
將式(12)代入系統(tǒng)體動(dòng)力學(xué)方程(10),得:
(13)
同時(shí)計(jì)算上式兩邊和第p階增廣特征矢量Vp的內(nèi)積,根據(jù)增廣特征矢量的正交性條件:
〈MVk,Vp〉=δk,pMp, 〈KVk,Vp〉=δk,pKp
式中:δk,p為Kronecker函數(shù)。可得:
(14)

式(14)即為廣義主坐標(biāo)下的導(dǎo)軌身管系統(tǒng)強(qiáng)迫振動(dòng)的運(yùn)動(dòng)微分方程,逐個(gè)求解可得t時(shí)刻對(duì)應(yīng)的廣義坐標(biāo)qp(t),將所求結(jié)果代入式(12)即可得到導(dǎo)軌身管系統(tǒng)在指定外力作用下的動(dòng)態(tài)響應(yīng)。
2.2 導(dǎo)軌身管系統(tǒng)靜位移
在重力的作用下,發(fā)射前導(dǎo)軌身管在鉛垂平面內(nèi)已經(jīng)彎曲,其靜變形將會(huì)影響一體化發(fā)射單元在膛內(nèi)的運(yùn)動(dòng)。在研究計(jì)算一體化發(fā)射單元的起始擾動(dòng)時(shí),需要計(jì)算重力引起的導(dǎo)軌身管的靜變形。

M=diag(m1,m2,m3)
(15)
模態(tài)質(zhì)量Mp與廣義力Fp表達(dá)式分別為

(16)

(17)
解算出各階模態(tài)下對(duì)應(yīng)的廣義坐標(biāo)qp(t),代入式(12),利用模態(tài)疊加法即可求得導(dǎo)軌身管三梁系統(tǒng)在重力作用下的靜位移。
2.3 導(dǎo)軌所受電磁力
要在短時(shí)間內(nèi)使電樞獲得較高初速,需要在電樞上作用很大的電磁力,而其大小正比于導(dǎo)軌中電流的平方。目前工程中獲得一定持續(xù)時(shí)間的大電流時(shí),最常見(jiàn)的方法是將多個(gè)脈沖電流合成得到較寬的電流寬度,合成的電流可簡(jiǎn)化為如圖3所示。
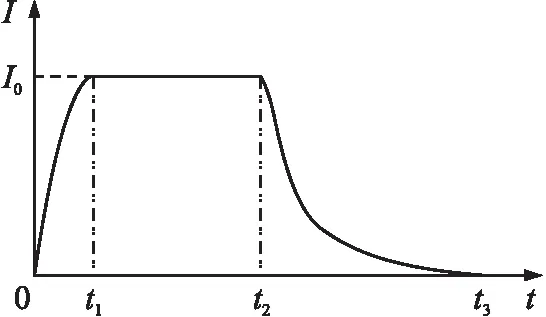
圖3 多脈沖合成電流示意圖Fig.3 Schematic diagram of multi-pulse synthetic current
合成電流第一階段可視為按正弦規(guī)律增大,第二階段可視為恒定,第三階段可視為按指數(shù)規(guī)律衰減,整個(gè)電流過(guò)程用函數(shù)表示為[21]
(18)

本文考慮電流在導(dǎo)軌與電樞中的分布情況,假設(shè)導(dǎo)軌和電樞中電流分布為線(xiàn)電流模型,將上下導(dǎo)軌及電樞分別看成一根載流直導(dǎo)線(xiàn),忽略電流的趨膚效應(yīng),如圖4所示。

圖4 某型電磁軌道炮導(dǎo)軌電流示意圖Fig.5 Schematic diagram of rail current of a certain type of electromagnetic railgun
空間中一根載流直導(dǎo)線(xiàn)在距離其為r的任意點(diǎn)(x,y)處產(chǎn)生的磁感應(yīng)強(qiáng)度為
(19)

流經(jīng)上導(dǎo)軌的電流在下導(dǎo)軌位置處產(chǎn)生的磁感應(yīng)強(qiáng)度為
(20)
流經(jīng)電樞的電流在下導(dǎo)軌位置處產(chǎn)生的磁感應(yīng)強(qiáng)度為
(21)
對(duì)于平面運(yùn)動(dòng)模型,只考慮導(dǎo)軌間y方向的電磁載荷:
(22)
導(dǎo)軌受到電樞電流產(chǎn)生磁場(chǎng)引起的y方向電磁載荷為
(23)
因此,下導(dǎo)軌上受到的總電磁載荷為
Fr=Frr+Far=(Krr+Kar)I2=KrI2
(24)
2.4 導(dǎo)軌身管系統(tǒng)動(dòng)態(tài)響應(yīng)
系統(tǒng)動(dòng)力響應(yīng)物理坐標(biāo)、第p階增廣特征矢量及對(duì)應(yīng)的增廣算子M與求解導(dǎo)軌身管系統(tǒng)靜位移時(shí)一致,系統(tǒng)對(duì)應(yīng)外力列陣更新為F=(Fr+m1gm2g-Fr+m3g)T,對(duì)應(yīng)的廣義力為

(25)
將式(16)、式(25)代入式(14),求解導(dǎo)軌身管系統(tǒng)動(dòng)力學(xué)微分方程,解得廣義坐標(biāo)qp(t),經(jīng)過(guò)模態(tài)疊加得到導(dǎo)軌身管系統(tǒng)動(dòng)態(tài)響應(yīng),電磁軌道炮導(dǎo)軌身管系統(tǒng)動(dòng)力學(xué)分析流程如圖5所示。

圖5 電磁軌道炮導(dǎo)軌身管系統(tǒng)動(dòng)力學(xué)分析流程圖Fig.5 Flow chart for dynamic analysis of rail barrel system of electromagnetic railgun
3 仿真計(jì)算
3.1 導(dǎo)軌身管系統(tǒng)振動(dòng)特性
本文以某型電磁軌道炮為例,導(dǎo)軌與身管的間距h=0.1 m,系統(tǒng)其他相關(guān)的計(jì)算參數(shù)見(jiàn)表1。利用商業(yè)有限元軟件Comsol對(duì)導(dǎo)軌身管系統(tǒng)振動(dòng)特性進(jìn)行仿真驗(yàn)證,建立導(dǎo)軌身管系統(tǒng)有限元模型,如圖6所示,身管與上下導(dǎo)軌間的聯(lián)接條件設(shè)置為彈性薄層,在身管特定位置處設(shè)置兩個(gè)彈性基礎(chǔ)模擬地面支撐,采用三角形單元?jiǎng)澐志W(wǎng)格,共劃分5 108個(gè)單元。計(jì)算導(dǎo)軌身管系統(tǒng)前8階固有頻率,計(jì)算結(jié)果見(jiàn)表2。

表1 電磁軌道炮導(dǎo)軌身管系統(tǒng)主要參數(shù)Table 1 Main parameters of electromagnetic rail gun rail barrel system

圖6 電磁軌道炮導(dǎo)軌身管系統(tǒng)有限元模型Fig.6 FEM model of guideway barrel system of electromagnetic railgun
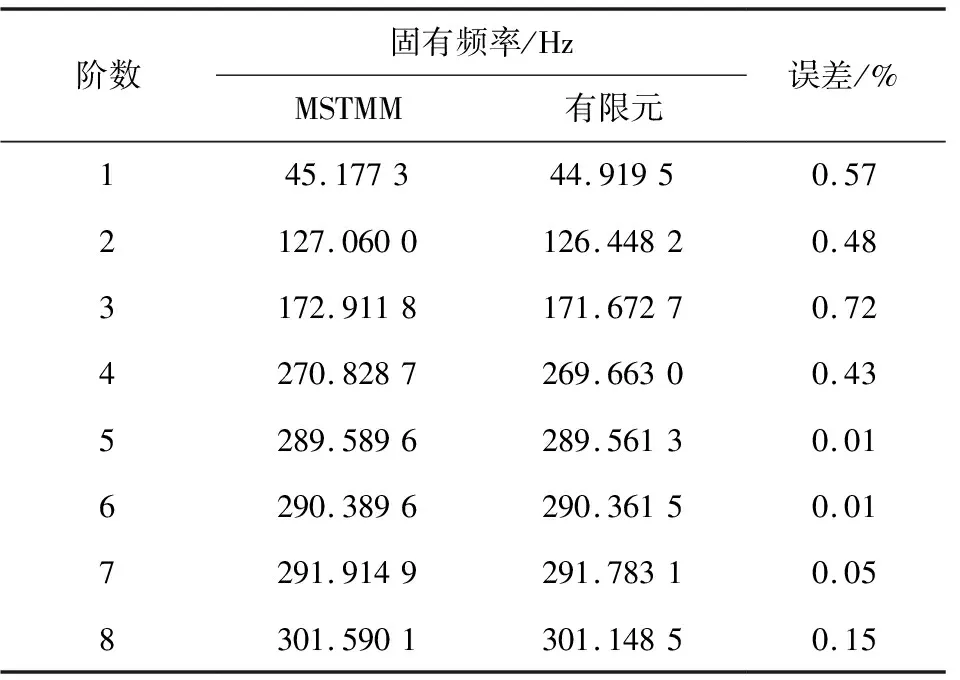
表2 導(dǎo)軌身管三梁系統(tǒng)固有頻率Table 2 Natural frequency of three-beam system of guide rail tube
由表2中數(shù)據(jù)可以看出,兩種方法計(jì)算結(jié)果高度一致,驗(yàn)證了MSTMM求解導(dǎo)軌身管系統(tǒng)固有振動(dòng)特性的精確性,且MSTMM的計(jì)算時(shí)間為1.315 s,有限元方法的計(jì)算時(shí)間為8.931 s,利用MSTMM可以大幅提高計(jì)算速度。本文給出導(dǎo)軌身管系統(tǒng)前六階模態(tài)振型,如圖7所示。


圖7 導(dǎo)軌身管系統(tǒng)前六階模態(tài)振型Fig.7 The first six modes of guide rail tube system
3.2 導(dǎo)軌身管系統(tǒng)靜位移
導(dǎo)軌身管三梁系統(tǒng)在重力作用下的靜位移計(jì)算結(jié)果如圖8所示。由圖8可以看出,上導(dǎo)軌、身管和下導(dǎo)軌靜位移趨勢(shì)一致,均為炮尾處的靜位移達(dá)到最大值,炮口處?kù)o位移略微上翹,且由于實(shí)際結(jié)構(gòu)材料與裝配過(guò)程中的誤差,上下導(dǎo)軌與身管間的接觸剛度存在差異,導(dǎo)致上下導(dǎo)軌在重力作用下的靜位移略有不同。MSTMM計(jì)算結(jié)果與有限元比較最大相對(duì)誤差為0.84%。
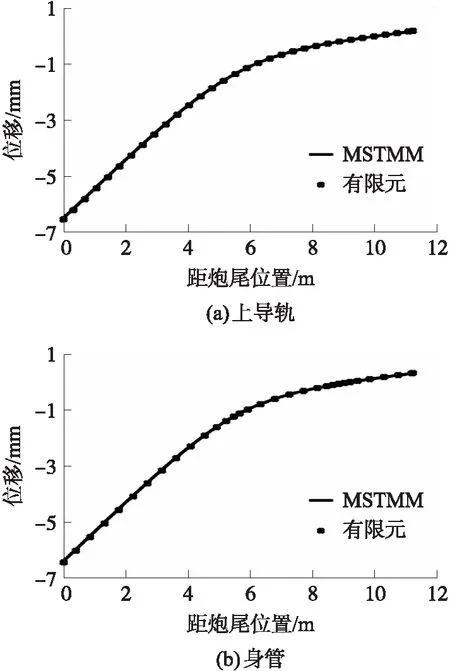

圖8 導(dǎo)軌身管系統(tǒng)重力作用下的靜位移Fig.8 Static displacement of guide rail barrel system under gravity
3.3 系統(tǒng)所受電磁載荷
當(dāng)電樞在炮口位置時(shí),系統(tǒng)導(dǎo)軌所受電磁力分布計(jì)算結(jié)果如圖9所示。由圖可知,導(dǎo)軌間的電磁載荷在靠近炮尾的一段距離處迅速增大,然后基本保持不變,最后在靠近電樞的一段距離處迅速減小,且增大和減小的區(qū)域成對(duì)稱(chēng)分布;電樞對(duì)導(dǎo)軌的電磁載荷在遠(yuǎn)離電樞處很小,接近電樞位置時(shí)迅速增大。考慮到電磁載荷在導(dǎo)軌中間位置變化很小,只在炮尾和電樞附近有顯著變化,因此,可將導(dǎo)軌受到的電磁載荷簡(jiǎn)化為均布載荷q和集中力F的組合。

圖9 導(dǎo)軌所受電磁力作用系數(shù)Fig.9 Distribution of electromagnetic force on guide rail
3.4 導(dǎo)軌身管系統(tǒng)動(dòng)態(tài)響應(yīng)
導(dǎo)軌身管系統(tǒng)在重力及時(shí)變電磁力作用下的系統(tǒng)動(dòng)態(tài)響應(yīng)計(jì)算結(jié)果如圖10和圖11所示。由圖可以看出,在電流上升初期,電磁力與重力相比對(duì)系統(tǒng)影響較小,系統(tǒng)橫向位移均在炮尾處達(dá)到最大值,當(dāng)電流處于峰值平臺(tái)期間,上下導(dǎo)軌受樞軌間電磁力作用,動(dòng)態(tài)響應(yīng)幅值逐漸達(dá)到峰值,同一時(shí)刻,上下導(dǎo)軌動(dòng)態(tài)響應(yīng)幅值并不相同,系統(tǒng)橫向位移最大值出現(xiàn)在系統(tǒng)兩端(炮口或炮尾);身管在通電過(guò)程中波動(dòng)范圍變化不大,橫向位移幅值小于上下導(dǎo)軌橫向位移幅值,受地面固定位置彈性支撐作用影響,身管炮尾處橫向位移變化量大于炮口位置處。

圖10 導(dǎo)軌身管系統(tǒng)動(dòng)態(tài)響應(yīng)Fig.10 Dynamic response of guide rail barrel system

圖11 導(dǎo)軌身管系統(tǒng)炮口處位移-時(shí)間曲線(xiàn)Fig.11 Displacement-time curve at the muzzle of guide rail barrel system
在炮口位置處,上下導(dǎo)軌位移-時(shí)間曲線(xiàn)與身管位移-時(shí)間曲線(xiàn)的變化趨勢(shì)保持一致,由于彈性支撐參數(shù)等非對(duì)稱(chēng)性因素的影響,上導(dǎo)軌炮口點(diǎn)變形量更大;在系統(tǒng)初始階段,由于流經(jīng)軌道的電流較小,上下導(dǎo)軌及身管炮口點(diǎn)均以靜變形位置為平衡位置上下波動(dòng),隨著電流到達(dá)峰值平臺(tái),導(dǎo)軌間的電磁斥力逐漸變大,在身管結(jié)構(gòu)支撐的共同作用下,上下導(dǎo)軌炮口處間距在“擴(kuò)張-收縮”的過(guò)程中反復(fù)震蕩,當(dāng)軌道電流處于指數(shù)衰減階段時(shí),導(dǎo)軌間的電磁斥力迅速減小,上下導(dǎo)軌及身管炮口點(diǎn)在靜變形位置附近上下振動(dòng)。
4 結(jié)束語(yǔ)
本文以電磁軌道炮導(dǎo)軌身管發(fā)射裝置為研究對(duì)象,對(duì)導(dǎo)軌身管系統(tǒng)的動(dòng)力學(xué)模型、振動(dòng)特性、動(dòng)態(tài)響應(yīng)等問(wèn)題進(jìn)行了探究,利用MSTMM建立導(dǎo)軌身管系統(tǒng)三梁動(dòng)力學(xué)模型,以電磁場(chǎng)計(jì)算出的電磁力為激勵(lì)源,利用模態(tài)疊加法求解導(dǎo)軌身管系統(tǒng)在重力及時(shí)變電磁力作用下的動(dòng)態(tài)響應(yīng),探究了上下導(dǎo)軌非對(duì)稱(chēng)性對(duì)系統(tǒng)靜變形及動(dòng)態(tài)響應(yīng)的影響,并通過(guò)有限元法驗(yàn)證了MSTMM的正確性和快速性。下一步將討論考慮一體化發(fā)射彈丸膛內(nèi)運(yùn)動(dòng)過(guò)程和時(shí)變電磁載荷的彈軌耦合發(fā)射動(dòng)力學(xué)模型。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
- 彈道學(xué)報(bào)的其它文章
- 基于SEA的常規(guī)導(dǎo)彈封鎖機(jī)場(chǎng)跑道作戰(zhàn)效能分析與應(yīng)用
- 基于混凝土拉伸損傷的侵徹混凝土數(shù)值模擬研究
- 預(yù)爆管點(diǎn)火能量對(duì)吸氣式旋轉(zhuǎn)爆轟發(fā)動(dòng)機(jī)起爆過(guò)程影響數(shù)值研究
- 液體發(fā)射藥迫擊炮低壓發(fā)射性能的數(shù)值及實(shí)驗(yàn)研究
- 推進(jìn)劑質(zhì)量流量對(duì)三維非預(yù)混氫氧旋轉(zhuǎn)爆轟波傳播模態(tài)的影響
- 殼體厚度對(duì)裝藥爆炸沖擊波特性影響研究