
基于北斗高精度定位的重載鐵路列檢安全作業管理平臺設計
2023-10-16 19:12:26項鵬飛
計算技術與自動化 2023年3期
項鵬飛

關鍵詞:北斗高精度定位;重載鐵路;列檢作業;電子地圖;安全預警;電子圍欄
列檢作業人員上線作業主要依靠人工監督,來車接近通過人工嘹望的原始方式進行盯控,一旦出現過車嘹望不及時或作業人員超出安全區域作業的情況,極易造成人員傷亡;同時由于作業場作業范圍大,人員是否到達指定作業區域、是否按標準用時進行作業難以衡量;作業安排仍由人工分配,作業量統計仍采用原始方式,無法做到均衡分配、信息化統計;工作中設備與設施的巡檢和交接完全由人工紙質填記,沒有有效的卡控措施,造成人工作業耗時耗力,效率低下。基于這種現狀,有必要建設一套列檢作業安全管理系統,用技防手段輔助人防手段來實現盯控和監督提醒,提高現場工作的管理水平和效率。為滿足高載鐵路列檢作業安全管理的高精度定位要求,選用我國自主設計的北斗衛星定位系統實現列檢作業人員及車輛的定位及軌跡追蹤,該系統面向民用市場開放,配合北斗地面增強站,可使定位精度達到厘米級。
楊美皓等人針對鐵路作業人員安全問題,構建了鐵路作業人員安全監控系統,采用北斗高精度定位技術、電子地圖、載波相位差分技術等實現作業人員的準確定位,并能夠對違規闖入或越過電子圍欄的人員給予預警,但是應用局限性較大且成本較高。李煜等人針對鐵路控制中心無法實現作業車檢修的準確定位監控問題,構建了高鐵作業車的實時定位監控系統,該系統在.NET平臺上搭建,并利用MYSQL數據庫等技術實現,該系統具備作業信息的實時性采集與監測功能,但該系統定位準確度較低。因此,設計基于北斗高精度定位的重載鐵路列檢安全作業管理平臺,降低列檢作業風險水平,提高高載鐵路的精確定位、實時監控能力。
1重載鐵路列檢安全作業管理平臺
1.1重載鐵路列檢安全作業管理平臺總體框架
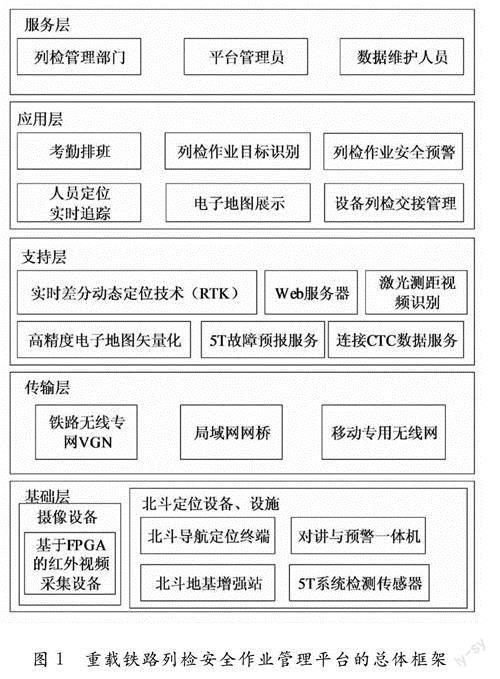
重載鐵路列檢安全作業管理平臺的總體框架如圖1所示。
該平臺由五部分構成,各層的詳細內容如下:
(1)基礎層。該層由重載鐵路列檢作業現場攝像設備和定位終端設備、設施構成,利用基于FP-GA的紅外視頻設備獲取重載鐵路列檢作業現場人員、車輛圖像信息;定位終端設備、設施,如北斗衛星導航定位終端、北斗地基增強站、對講與預警一體機、列檢手持機喇叭器、5T系統檢測傳感器等。
(2)傳輸層。該層是整個系統架構結構中的關鍵層次之一,可實現數據的端到端通信,主要包括鐵路無線專網、局域網網橋、移動專用無線網等信息傳輸通道。
(3)支持層。該層可實現北斗地基增強/北斗定位[實時差分動態定位技術(RTK)]、高精度電子地圖矢量化、5T故障預報服務、接人調度集中控制(CTC)數據服務、接人鐵路貨車技術管理信息系統(HMIS)數據、Web服務器、激光測距影像識別等功能,并可對重載鐵路列檢作業現場所有數據信息進行融合處理,為平臺應用層提供有力數據支持。
(4)應用層。該層可實現重載鐵路列檢安全作業管理,具體包括考勤排班、列檢作業目標識別、安全預警、設備巡檢交接管理、人員位置實時跟蹤、故障預報處理、電子地圖展示等職能。
(5)服務層。平臺管理、維護人員及車輛列檢管理部門的有關工作人員是該平臺的合法身份用戶,用戶可通過PC端和移動客戶端訪問重載鐵路列檢安全作業管理平臺。
1.2重載鐵路列檢安全作業管理平臺的硬件設計
1.2.1紅外視頻圖像采集設備
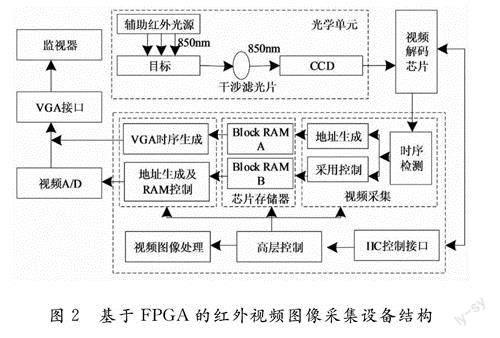
由于重載鐵路列檢作業現場視頻圖像采集過程中會受到現場環境、氣象條件各因素的干擾,外部光源具有強烈的變化,嚴重影響采集圖像的視覺效果。而紅外圖像對環境的適應度更強,在夜晚、惡劣天氣下也能采集到高質量的視頻圖像,滿足重載鐵路列檢作業要求;同時,輔助紅外近光源不會影響列檢作業現場工作人員及車輛駕駛員的正常作業,因此,重載鐵路列檢安全作業管理平臺的基礎層通過基于FPGA的紅外視頻圖像采集設備獲取列檢作業現場圖像信息,基于FPGA的紅外視頻圖像采集設備結構如圖2所示。
該設備上側為紅外視頻圖像采集的光學單元,內置CCD面陣傳感器,通過該攝像頭可獲取到720×576分辨率的標準PAL列檢作業紅外視頻流,圖像視覺效果達到后期處理要求。其輔助紅外光源為36枚LED,由其發送紅外線投射于列檢現場作業人員、作業車輛上,并通過CCD攝像頭實現紅外視頻圖像的獲取。為降低其余光源對成像效果的干擾,將適應CCD光譜特性的光學干涉濾光片加入光學單元中,并將其置于CCD攝像頭前,以此完成列檢作業現場紅外視頻圖像的采集,可使圖像灰度更加均勻,將環境等因素對成像效果的影響降至最低。FPGA芯片集紅外視頻的采集、控制、保存及成像功能于一體。通過光學單元獲取列檢作業紅外視頻信息流后,經視頻解碼芯片的解碼處理,傳輸至XC2VP30型號的FPGA芯片中,首先對其進行時序檢測,獲取視頻幀的時序數據,并完成時序定位的處理,再將其保存于芯片自身的存儲器中,通過視頻顯示器完成紅外圖像的展示。視頻幀數據經A/D轉換后,通過VGA接口與重載鐵路列檢安全作業管理平臺的監控設備連接,完成列檢作業視頻的采集。
1.2.2北斗高精度定位終端設備
將北斗高精度定位終端設備運行于嵌入式Linux操作系統中,可有效提升設備的運行速度,由于該系統具備卓越的內核處理能力,可允許多條請求同時訪問,具有響應效率高的特點,并且無響應拖延問題,系統更加穩定。該定位終端設備選用高精度解算定位主板,并與北斗、GPS等多星系融合算法具有較高的兼容性,其內配置高質量螺旋天線,結合抗干擾技術有效提升設備的抗干擾能力。利用全星座北斗GNSS定位通信網絡實現數據傳輸,可滿足數據通信的瞬時性要求。采用NMEA-0183標準協議,并以TSIP格式進行數據存儲。
北斗高精度定位終端設備可與所有平臺的GNSS定位手持接收機進行無縫連接,其定位準確度可達到分米級別,與千尋位置服務建立關聯后,可有效提升其定位準確度,達到厘米級別。北斗高精度定位技術對接千尋位置服務架構如圖3所示。
1.3高精度電子地圖的矢量化處理技術
平臺支持層將獲取的高載鐵路的各類設備高精度電子地圖進行矢量化處理,實現高載鐵路線路的劃分及標注.其中線路標注為帶狀,道岔用塊狀進行記錄,并將高載鐵路公里標信息標注于相應位置處。采用QGIS軟件實現高載鐵路高精度電子地圖的矢量化操作。矢量化處理過程如下:
第一步:調入高清影像地圖。
第二步:對WGS84坐標軸進行設定,以實現高載鐵路線路坐標的轉換處理。
第三步:確定高載鐵路線路的起始、終點位置坐標,在兩點之內完成點線面圖層的規劃處理,并將公里標標記于高載鐵路線路中,為后續的列檢作業計劃的加載、電子圍欄的生成打下基礎。
第四步:為高載鐵路的各核心場所設置矢量化圖元,并作標記。
第五步:實現高載鐵路高精度電子地圖展示。
1.4重載鐵路列檢作業目標識別
平臺應用層的列檢作業目標識別模塊,采用Cstx小波融合技術對采集到的北斗衛星信號進行解析,獲取列檢作業圖像,經降噪、增強、邊緣檢測一系列處理后,基于Hausdorff距離的自動識別列檢作業目標,完成列檢作業狀態監測。
1.4.1基于Cstx小波融合的北斗衛星信號解析
利用Cstx小波融合方法對北斗衛星信號進行解析處理,使列檢作業安全管理平臺的資源損耗量有效降低,提高列檢作業安全管理平臺的計算效率。北斗衛星信號歸于圖像信號之列,對其進行解析處理后,可得到R、G、B及Y通道圖層融合的彩色圖像。各通道圖像邊緣的灰度差存在差異性,導致信號解析效果無法控制。選擇灰度差大的通道,并視之為解析均值,可使信號解析率獲得一定程度的提升。
對于北斗衛星信號,獲取其灰度差最高的信號源,利用Cstx小波融合實現其二維小波的解析分離,可通過式(1)實現信號的解析描述:
1.4.2基于Hausdorff距離的列檢作業目標自動識別
北斗衛星信號解析處理后,采用Hausdorff距離方法對基于北斗衛星定位的列檢作業目標進行自動識別,目標識別過程如下:
第一步:在北斗衛星信號解析處理的基礎上,采用中值濾波法對列檢作業圖像進行降噪處理,再通過直方圖均衡化處理增強圖像,提高列檢作業圖像質量。
第二步:利用Canny邊緣檢測算法獲取列檢作業圖像邊緣信息,提取其邊緣位置信息之外,可實現邊緣像素點方向信息的確定。
第三步:通過形態學濾波算法確定列檢作業目標輪廓,通過(A+B)@B處理使目標邊緣線具有連續性,勾勒出完整的目標輪廓。
第四步:對列檢作業邊緣圖像作Hausdorff距離轉換處理,確定其具有相同大小的距離映射圖,距離大小即為該圖中各像素點值,距離轉換的描述公式為:
第五步:采用粗匹配精定位方法實現列檢作業模板的自動識別。對待匹配圖像內模塊所在位置進行粗略確定是粗匹配的方法,匹配過程為:實現圖像I及模板的分辨率的同步更新是列檢作業目標識別首要步驟,以使其處于低分辨率狀態,衡量二者間的相似度,基于局部最小值確定備選匹配點,數量為5~10個。再在各匹配位置周圍生成陣列,以獲得完整的匹配點,完成備選點的選取,陣列尺寸可為3×3或5×5。在備選點粗匹配的基礎上,實現匹配位置的準確確定,是精定位需實現的目標。根據閾值大小判斷兩點集是否匹配,當匹配結果小于閾值時,則兩點集匹配;反之,則判斷二者無法匹配。
1.5高載鐵路列檢作業人員安全預警
應用層的列檢作業安全預警模塊調用矢量化處理后的高載鐵路高精度電子地圖,并加載列檢作業日計劃后,即可實現電子圍欄區域的智能化獲取。通過列檢作業人員配備的北斗定位終端設備獲取其準確位置信息,在利用北斗衛星信號完成列檢作業目標的自動化識別的前提下,采用電子圍欄判斷列檢作業人員是否處于安全作業范圍之內,為越過電子圍欄邊界的作業人員發送預警信息,實現其列檢作業安全的實時性管理。另外,在高精度電子地圖上.將安全提示信息載入對應的高載鐵路重要場所位置坐標處,列檢作業人員途經對應位置后,即可自動向其北斗終端定位終端設備發送警示信息,起到列檢作業安全預控作用,保證列檢作業人員的人身安全,降低安全事故發生率。
2實驗分析
將點岱溝列檢作業場作為研究對象,將本文平臺應用于該作業場的列檢作業安全管理中,實現列檢作業人員的監控、安全預警、定位等,分析本文平臺的實用性。
北斗衛星信號的解析能力影響列檢作業目標的識別效果,分析北斗衛星信號利用率指標,并與解析前的信號利用情況作對比,分析本文平臺的性能,實驗結果如圖4所示。
分析圖4可知,采用Cstx小波融合對北斗衛星信號進行解析處理前,信號利用率呈大幅度波動性變化,總體利用水平較低;經小波融合處理后,有效提升了北斗衛星信號的利用率,利用率接近100%。實驗結果表明,本文平臺具有突出的北斗衛星信號解析性能。
獲取解析后的高載鐵路列檢作業圖像,建立列檢作業數據集。在數據集中隨機選擇一張圖像,如圖5所示,通過分析列檢作業目標識別結果,驗證本文平臺的監控性能,實驗結果如圖6所示。
由圖5可知,所采集的原始列檢作業圖像含有一定量的噪聲,圖像對比度低,存在細節損失,會直接影響圖像目標的識別效果,因此,對其進行去噪及直方圖處理。由圖6(a)得出,經處理,列檢作業圖像噪聲有效去除,圖像質量有所提升,圖像細節信息得以恢復,其對比度、清晰度得到明顯改善,提升圖像的視覺效果;由圖6(b)的邊緣提取結果可知,圖像邊緣輪廓清晰,輪廓線連續,能夠完整勾勒出圖像邊緣,表明本文平臺具有較強的邊緣檢測能力;由圖6(c)得出,本文平臺可識別列檢作業目標,并用紅色線條進行標記。實驗結果表明,本文平臺具有列檢作業目標識別能力,可完成對列檢作業的監控。
根據高載鐵路高精度電子地圖及列檢作業的日任務計劃完成對電子圍欄區域的確定,是實現本文平臺列檢作業安全預警的必要條件。采用本文平臺對列檢作業進行安全預警,通過分析本文平臺的預警結果,驗證本文方法的預警能力,實驗分析結果分別如圖7、圖8所示。
分析圖7可知,圖中黑色陰影即為確定的電子圍欄范圍,視該范圍為安全作業區域。在該區域內作業方可確保列檢作業的安全性。當列檢作業人員越過電子圍欄邊界或處于邊界時,本文平臺將向列檢作業人員攜帶的對講與預警一體機發送預警信息。如圖8所示的安全預警結果中包含北斗定位終端設備編號及列檢作業位置、時間等信息。實驗結果表明,本文平臺可完成電子圍欄的獲取,并具有列檢作業安全預警功能,確保列檢作業的安全性。
將北斗高精度定位技術應用于列檢作業管理中,通過定位結果分析本文平臺的定位能力,實驗結果如圖9所示。
分析圖9可知,應用北斗高精度定位技術對高載鐵路列檢作業進行定位管理后,可實現列檢作業目標的準確定位,用紅色方框進行標記,同時,可完成對作業目標軌跡的跟蹤,其運動軌跡用虛線標注。實驗結果表明,本文平臺可實現列檢作業目標的定位、軌跡跟蹤功能。
3結論
將本文平臺應用于點岱溝列檢作業場中,對其進行列檢作業安全管理,分別從列檢作業現場目標識別、定位及安全預警方面分析本文平臺的應用性能。實驗結果表明:
(1)可實現列檢作業圖像的處理,并識別出列檢作業目標。
(2)可獲取電子圍欄,并對跨越其邊界的作業人員進行安全預警。
(3)可實現列檢作業人員的準確定位及軌跡追蹤。
