海底纜線綜合探測方法及應用
2023-10-18 06:56:46許寶華李道鵬肖仲凱
水利水電快報 2023年10期
蔡 璇,許寶華,李道鵬,王 露,肖仲凱
(1.長江水利委員會水文局 長江下游水文水資源勘測局,江蘇 南京 210011; 2.長江水利委員會水文局 長江口水文水資源勘測局,上海 200136; 3.寧波海大工程勘察設計有限公司,浙江 寧波 315200)
0 引 言
探測已敷設的海底纜線路由準確位置和掩埋狀態,查明纜線路由區域內可能存在的障礙物和海床沖淤情況,可為海底纜線安全運行和自然資源、海事及航道等部門的管理提供技術支撐。目前水域物探勘察與檢測技術有水上地震、水上電法、淺剖、水下機器人等技術[1]。利用多波束測深系統、單波束測深、淺地層剖面儀、側掃聲吶等多種技術手段,可確定海底輸油管道掩埋、裸露、懸空的長度[2]。采用多波束與單波束相結合的方式,可應用于水下防護工程的檢測[3]。采用探地雷達技術,可對水下沉積物地質分布及地形狀態進行探測[4]。
雖然以上方法都能實現海底纜線的有效探測,但在探測精度、適用性方面均存在不足。為此,本文利用綜合比較分析法,提出了一種海底纜線綜合探測法。多波束測深系統能夠精確快速地測出沿航線一定寬度范圍內水下目標的大小、形狀和高低變化,從而描繪出水底地形地貌的精細特征;側掃聲吶通過拖魚的發射單元兩側,同時向海底發射一定頻率聲波脈沖,根據海底地物反射信號強度大小,轉換成不同灰度像素影像目標圖像;淺地層剖面儀是一種通過發射機發射聲波脈沖信號,使聲波在水中和水下地層中傳播和反射,接收機接收反射聲波脈沖,并形成圖像來探測水下地層結構[5],可識別管線等目標體,對管徑較大并埋藏較淺的管道探測明顯;磁力儀是通過測量不同磁化強度的目標體在地磁場中所引起的磁異常位置和分布規律,確定被探測目標體的位置走向及其他信息[6]。海底纜線本身具有磁性,磁力儀對磁性物質敏感精度高,能探測出海底電纜引起的磁場變化,根據這種異常曲線就可判斷海底電纜的位置,并逐點繪制出海底電纜的走向[7]。綜合應用以上多種海洋探測設備,可充分發揮各個設備的優點,從而提高海底纜線的探測精度和適用性。
1 綜合探測法
利用多波束、側掃聲吶、淺地層剖面儀、磁力儀對海底纜線進行綜合探測。將多波束系統安裝在距測船船首1/3~1/2處,建立船體坐標系,假定多波束換能器的吃水面為零點,建立外圍設備GNSS、OCTANS姿態儀和多波束換能器相對于零點在船體坐標系中的關系。在預定的水域進行橫搖(roll)、縱搖(pitch),艏搖(yaw)校正[8];側掃聲吶利用固定支架將拖魚懸掛于船舷左側中部,根據現場調整拖魚位置和姿態,量算GNSS天線中心至固定支架的距離,改正拖魚位置;淺剖拖魚固定在船舷右側中部,與側掃聲吶位置相對;磁力儀采用尾拖法由船尾釋放入海,拖魚與海底面保持2~5 m的距離,為避免船體磁性對測量造成干擾,儀器釋放距離約為船長3倍,水深較淺時,適當減少纜長。船速控制在3節左右,調查時準確量算拖魚海纜的釋放長度,并使用Hypack軟件改正拖魚位置。為評估不同方法對海底纜線探測精度的影響,從平面坐標偏差和埋深偏差兩個方面進行精度驗證和比較分析。
2 應用實例
2.1 研究區域與數據獲取
應用實例位于江蘇大豐海域,是海上風電大豐H6項目(裝機容量300 MW)路由探測項目,具體位置見圖1,利用海底纜線綜合探測法進行測量,來確定已敷設的海纜路由位置和埋深。
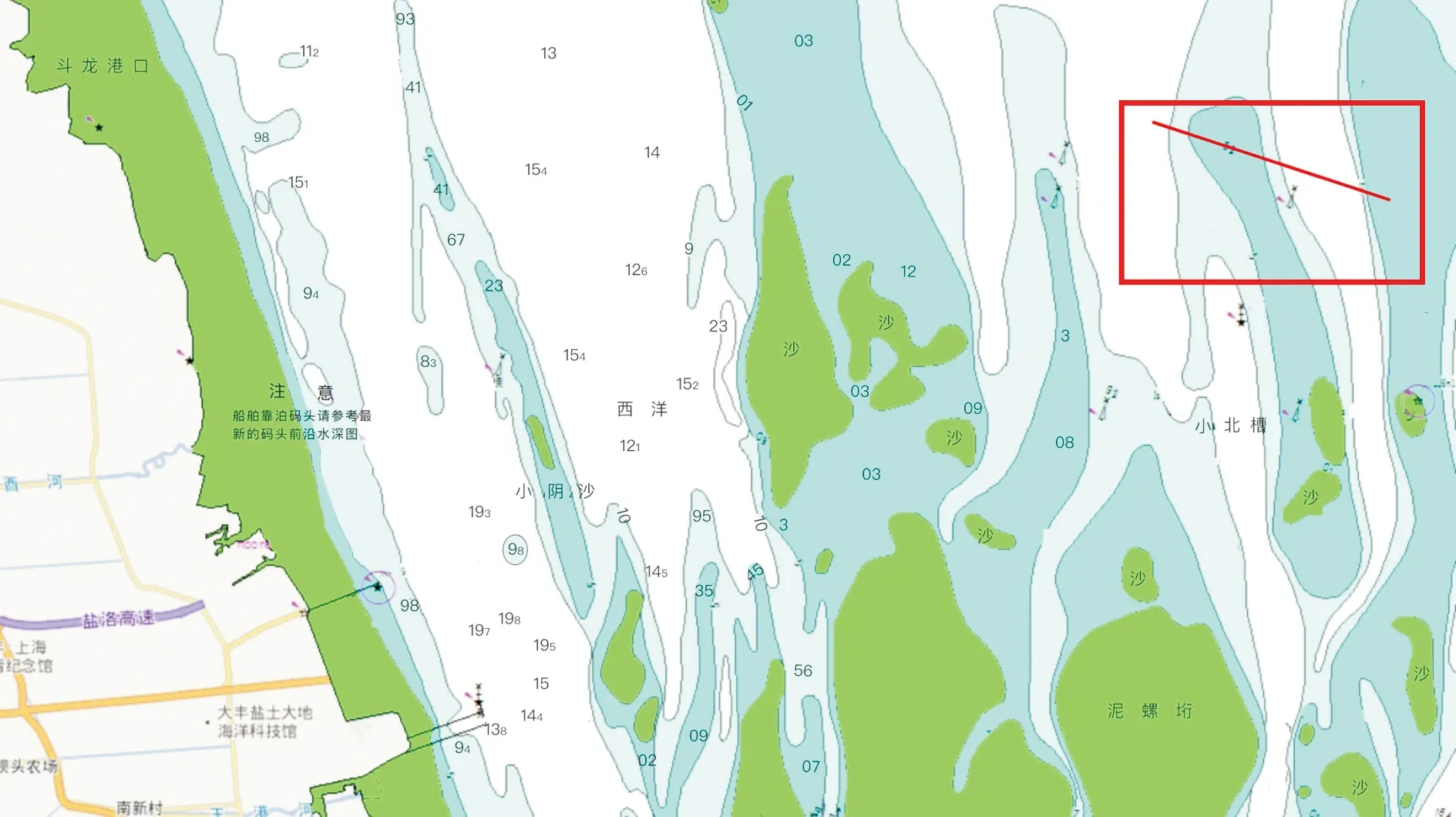
圖1 大豐H6勘測位置示意 Fig.1 Schematic diagram of survey position of Dafeng H6
水下地形掃測采用Reson SeaBat 7125型多波束系統,該系統是淺水型雙頻高分辨率測深系統,其技術特點為:動態聚焦和窄波束聲學技術、橫搖穩定性和底跟蹤技術、覆蓋掃寬可調、波束密度可調、在線實時輸出高分辨率三維水深和側掃聲吶數據等高新技術配置[8]。海底面狀側掃采用EdgeTech 4200-FS雙頻側掃聲吶系統(120/400 kHz),通過系統控制軟件,可選擇高分辨率工作模式(HDM)和高速工作模式(HSM),并配備了艏向、縱搖和橫搖傳感器[9],用于觀測泥面上可能存在的海纜敷設痕跡或裸露的海纜以及施工區域內施工后障礙物分布情況。采用EdgeTech 3400淺地層剖面儀探測泥面下海纜的路由位置和埋深情況;該系統包括甲板系統和拖魚系統兩個主要子系統,甲板子系統包括聲吶工作站和軟件包,拖魚子系統包括淺剖拖魚、多路調制解調器及電子倉套件等;該系統采用實時縱橫升沉補償及深度傳感器,還特有水面噪聲抑制技術,既提升穿透能力,又能夠提供高分辨率地層分層圖像[10]。采用G882SX海洋磁探儀探測泥面下海纜的路由位置和埋深情況;G882SX海洋磁探儀應用靈活,可用于小船、淺水調查中,也可用在深水拖體中,適用于探測和定位各種尺寸的磁性目標。
測量范圍為以各段海纜路由中心線為基準的兩側各500 m范圍,多波束掃測測線間距40 m,測線寬控制在2~3倍水深,保證掃寬有20%的重復覆蓋率;側掃聲吶沿路由中心線及中心線向左、右兩側按照100 m間距各布設5條測線,共布設側掃測線11條;淺剖測線間距200 m,垂直于電纜路由方向共63條;磁法測線主測線間距一般為200 m,轉彎段加密為20 m間距,垂直于推薦電纜路由方向。
2.2 數據處理
多波束掃測的水深數據,采用PDS2000內外業一體化軟件進行處理,其基本流程:波束水深編輯→校正系統偏移值→加入聲速剖面計算→加入水位計算→建立數據格網模型→拼接數據[11]。多波束測量現場展示見圖2。
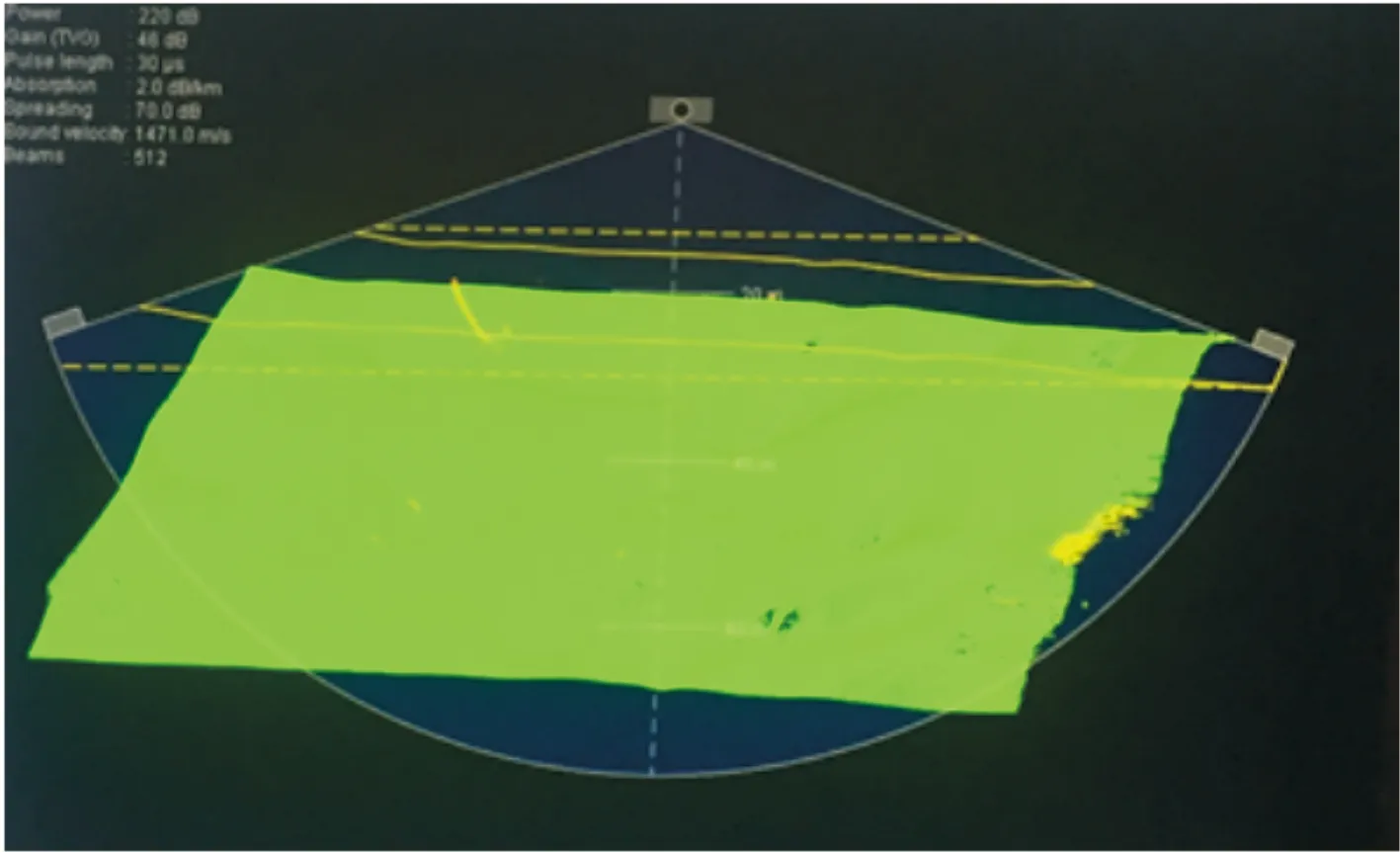
圖2 多波束測量現場展示Fig.2 Field display of multibeam measurement
側掃聲吶掃測利用專業后處理軟件對側掃聲吶資料進行數據回放,對資料進行解釋和分析,管線典型聲像見圖3,在回放記錄上識別海底異常反射現象,掌握海底面狀況特征[12]。重點關注海底裸露基巖、沉船、沖刷和其他障礙物等可能對管線安全造成影響的地貌特征,并注意區分船舶尾流和漁網等干擾信號和噪聲的影響。利用SonarWiz軟件標注海底目標物的位置、形狀、大小和分布范圍,并對典型記錄進行截圖。將解釋結果導入到AutoCAD軟件中,繪制路由區海底面狀況圖。
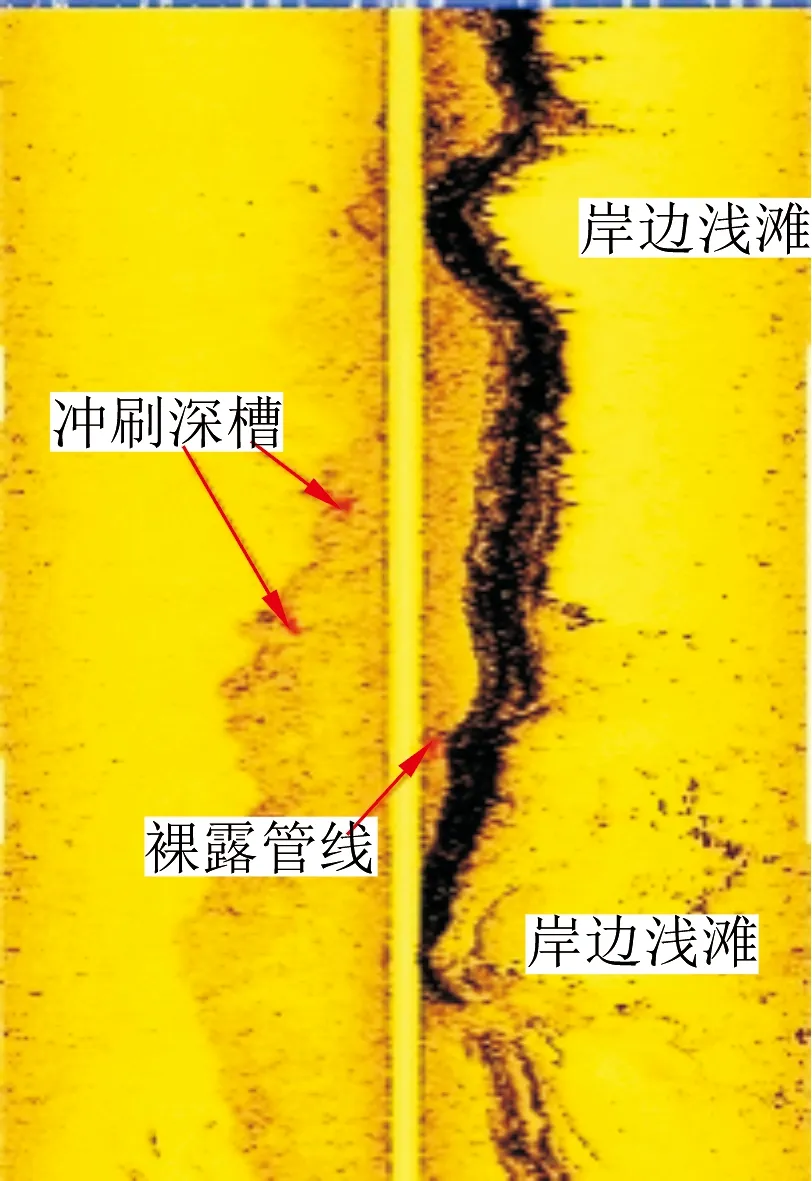
圖3 管線典型聲像Fig.3 Typical acoustic image of pipeline
淺地層剖面數據使用SGY存儲格式,運用Discover 3400專業后處理軟件進行資料解釋,在解釋過程中注意觀察記錄面貌,實時調節TVG等參數。識別地層剖面圖像記錄上的干擾信號,根據剖面圖像的反射結構、振幅、頻率、同相軸連續性和反射波接觸關系等特征劃分聲學地層層序,解釋地層沉積結構、地層構造,判斷沉積類型及其工程地質特征等,電纜典型聲像見圖4。分析路由海域沿程淺部地層的不良地質(災害地質)情況,如淺層氣、海底滑坡、沙波、沙脊、埋藏古河谷、微斷層等,確定其性質、形態及分布范圍。根據淺地層聲像圖地層反射特征分析,該工程海域的表層巖性為砂質,淺地層剖面探測效果差,幾乎無法穿透,僅能探測到埋深較淺的電纜。鑒于該海域表層巖性的特性,采用磁法探測手段代替淺地層剖面測量,對于淺地層剖面能探測到的區域,采用兩者相結合的探測方法相互印證。
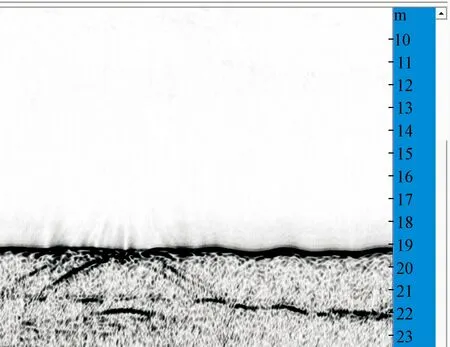
圖4 電纜典型聲像Fig.4 Typical sound image of cable
磁力儀探測路由通常使用國內外常用的GEOSOFT OASIS Montaj軟件,畫出由管線磁異常引起的磁異常平面剖面(圖5),再將異常的中心點坐標連成直線,從而得到管線路由。根據拖體的泥面高度和磁異常信號的寬度,通過建立精確的磁法探測數學模型,并根據現場作業條件確定變量參數,最終反演計算得到的海纜平面位置和埋深。
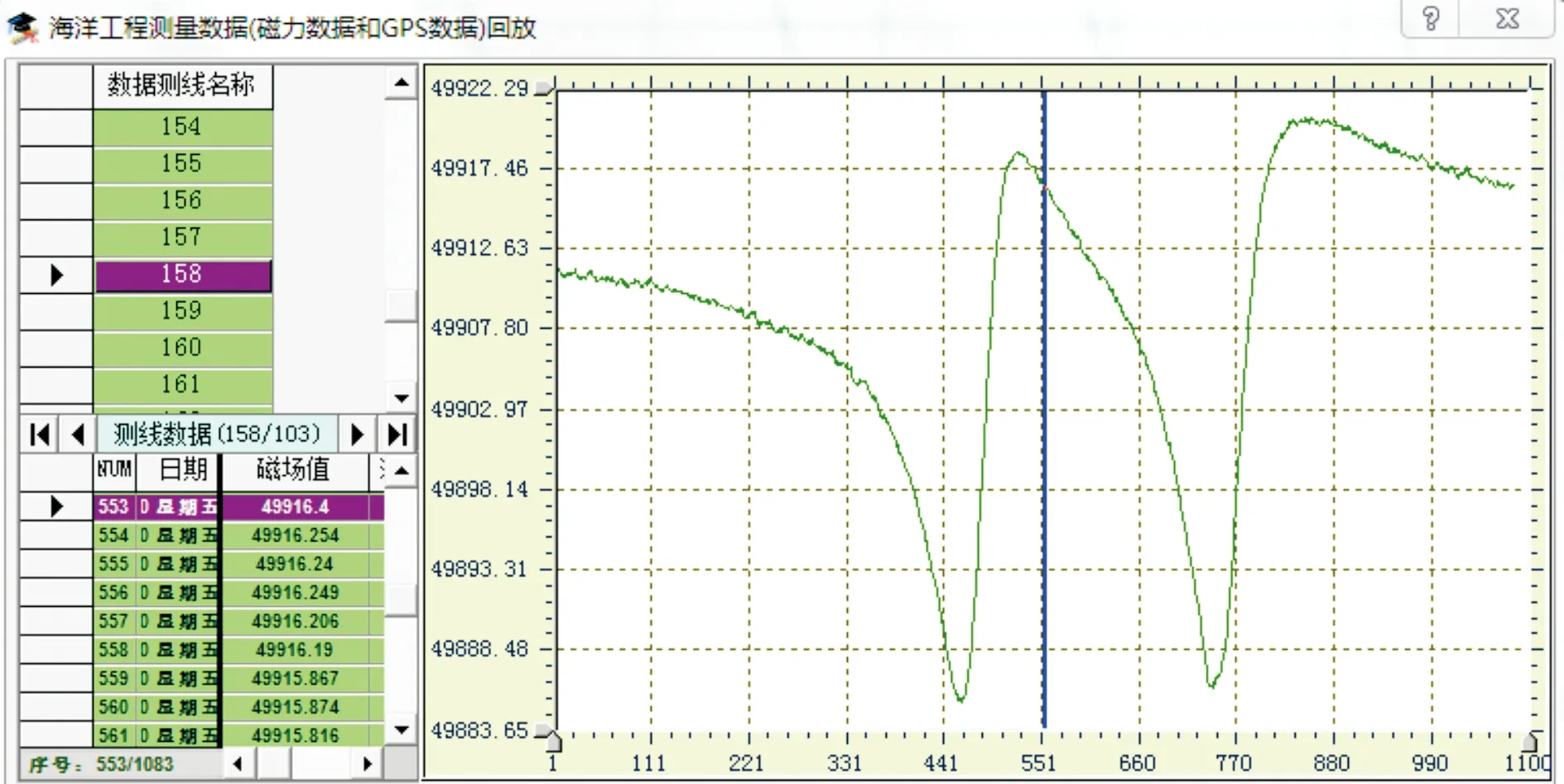
圖5 雙回路埋深接近的典型磁異常剖面Fig.5 Typical magnetic anomaly profile with double circuit burial depth approaching
2.3 結果分析與精度評價
2.3.1淺地層剖面探測與磁法探測結果精度分析
已敷設電纜淺剖測線間距為200 m,垂直于電纜路由方向,由于該海區為硬砂底質,淺剖穿透效果不佳,故用磁法探測手段全程補測,即磁法探測與淺地層剖面測線除特殊區域外100%重疊,重疊測線59條。其中,淺地層能同時探測到兩條電纜的測線22條,能探測到其中一條電纜的測線27條,剩余10條測線均未探測到較為明顯的電纜聲像。共獲取淺地層剖面探測與磁法探測同時能探測到電纜的點位71處。磁法探測獲取的電纜位置及埋深相較于淺地層剖面獲取的電纜信息差值統計見表1~2。兩者平面位置互差在1.5 m以內的占比達到97.2%。
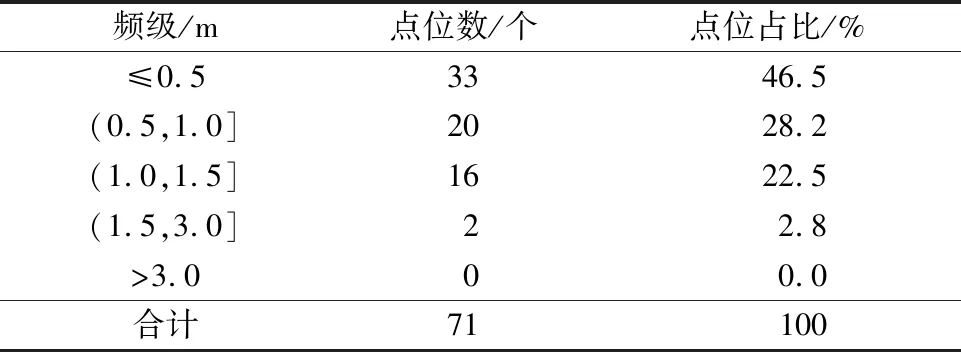
表1 磁法探測相較于淺地層剖面探測電纜平面坐標差值Tab.1 Difference in plane coordinates of magnetic detection compared to shallow layer profile detection cable
表2 磁法探測相較于淺地層剖面探測電纜埋深差值Tab.2 Difference in cable burial depth between magnetic detection and shallow profile detection
2.3.2磁法探測往返測精度分析
該海區由于水深較淺,淺地層剖面探測無法進行,采用磁法探測的手段代替,對直線段部分區域采用往返測的方式獲取電纜信息,均能明顯探測到兩條電纜引起的磁異常。對獲取重疊點位的電纜位置信息進行差值統計如表3所示。往返測平面位置互差在1.5 m以內的占比達到97.1%。
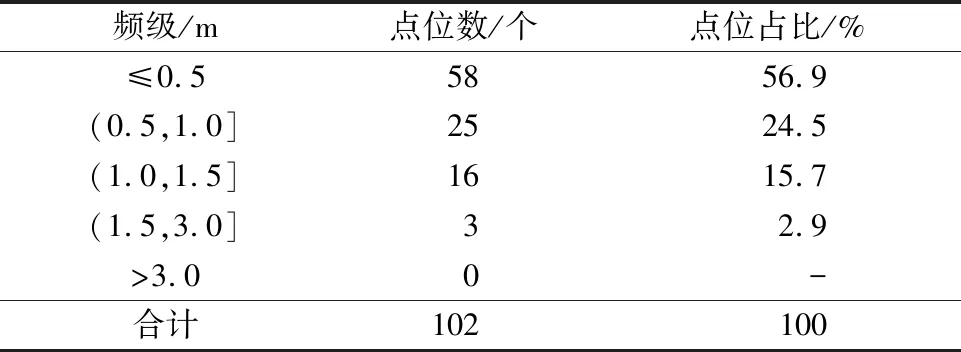
表3 磁法探測往返測獲取的電纜平面坐標差值Tab.3 Difference in cable plane coordinates obtained from magnetic detection and round trip surveys
2.4 探測精度分析

(2) 磁法探測海纜坐標位置平面精度ML為±1.5 m,海纜估算埋深精度MH為±0.3 m。
(3) 淺剖數據反映的是垂直換能器正下方的海底剖面數據,經偏心改正后,淺剖精度近似于GNSS定位精度,平面精度優于±1.0 m。
(4) 海纜總體精度:綜合側掃聲吶掃測、磁法探測和淺剖測量成果,得到海纜最終的平面坐標位置精度ML為±1.5 m,埋深精度MH為±0.3 m。
3 結 論
為提高海底纜線探測精度和適用性,本文綜合應用多種海洋探測設備,充分發揮各個設備的優點,提出了海底纜線綜合探測法并成功應用在江蘇大豐海上風電海底輸電纜線的探測,具體結論如下。
(1) 采用多波束、側掃聲吶掃測、淺地層剖面儀探測、磁法探測等方法,基本查明了海底電纜敷設后的現勢路由位置和埋深以及區域內施工后障礙物分布情況。
(2) 綜合側掃聲吶掃測和磁法探測測量成果,得到海纜最終的平面坐標位置精度ML為±1.5 m,埋深精度MH為±0.3 m。
(3) 在聲學方法探測中,側掃聲吶和多波束只能探測裸露或者懸空在海床面上的電纜,且無法識別直徑較小的電纜;淺地層剖面儀可以對裸露或者埋藏在海床以下的電纜進行探測,但不能連續探測,需要正切海底電纜上方,可能會缺失對某些裸露電纜的探測。而且,對于底質為硬砂質段,淺地層剖面無法穿透,在水深較淺的海域,淺地層剖面探測無法進行;磁力儀是通過探測水下磁場變化,從而探測出水下管線等磁異常體,在磁法探測范圍內,使用高精度海洋磁力儀,均明顯探測到由海底管線引起的磁異常,但易受周圍磁性物質的干擾。因此,磁力儀、淺剖儀、側掃聲吶和多波束探測技術方法具有局限性,需綜合應用。
