基于DCS丙烯腈反應(yīng)器三層控制技術(shù)研究
2023-10-18 06:09:30姜金鎖李照杰沈洪洋劉建軍
全面腐蝕控制 2023年8期
姜 珮 姜金鎖 李照杰 沈洪洋 劉建軍
(1. 天華化工機(jī)械及自動(dòng)化研究設(shè)計(jì)院有限公司,甘肅 蘭州 730060;2. 蘭州石化公司自動(dòng)化院,甘肅 蘭州 730060;3. 中石油蘭州石化公司,甘肅 蘭州 730060 ;4. 山東東宏管業(yè)股份有限公司,山東 濟(jì)寧 273100)
0 引言
先進(jìn)控制技術(shù)是提高裝置操作水平和經(jīng)濟(jì)效益行之有效的方法,在先進(jìn)控制層次之上的在線(xiàn)優(yōu)化技術(shù)是煉化裝置過(guò)程控制的發(fā)展方向,優(yōu)化控制已由單裝置走向多裝置優(yōu)化,并逐步發(fā)展到全廠(chǎng)的優(yōu)化生產(chǎn)。先進(jìn)控制的目標(biāo)是穩(wěn)定生產(chǎn)、降低消耗、提高產(chǎn)品質(zhì)量,進(jìn)而產(chǎn)生更好的經(jīng)濟(jì)效益。
國(guó)內(nèi)的丙烯腈工藝裝置以引進(jìn)為主,對(duì)反應(yīng)器操作條件進(jìn)行優(yōu)化,是提高裝置經(jīng)濟(jì)效益的最直接、最有效、最科學(xué)的途徑。
1 丙烯腈裝置工藝概述
丙烯腈裝置采用丙烯、氨、空氣為原料,在硫化床反應(yīng)器中通過(guò)催化劑制得丙烯腈,裝置分合成、分離、后處理和乙腈四個(gè)工序。丙烯、氨、空氣按1:1.05~1.25:9.5~10.5的比例通過(guò)催化劑的作用,在溫度435~450℃,壓力0.055~0.08MPa條件下進(jìn)行反應(yīng),主產(chǎn)物為丙烯腈,副產(chǎn)物為乙腈、氫氰酸等。
主反應(yīng):CH2=CH-CH3+NH3+3/2O2→CH2=CH2+3H2O+519KJ/mol
副反應(yīng): CH2=CH-CH3+3/2NH3+3/2O2→3/2CH3-CN+3H2O+552KJ/mol
2 三層控制技術(shù)
在丙烯腈裝置DCS系統(tǒng)之上實(shí)施三層控制技術(shù),第一層控制周期是秒級(jí),第二層控制周期是分鐘級(jí),第三層控制周期是小時(shí)級(jí),其結(jié)構(gòu)如圖1所示。
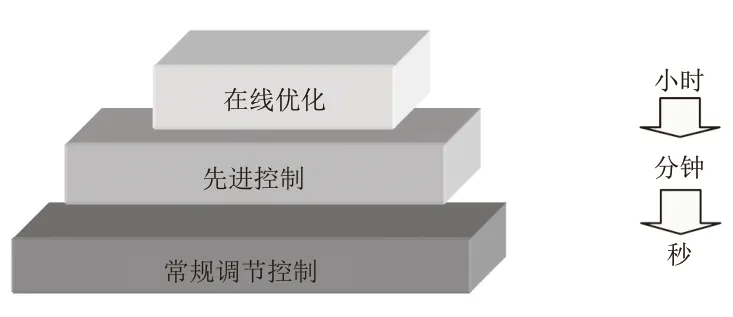
圖1 DCS上的三層控制
2.1 三層控制之間的區(qū)別
第一層是基礎(chǔ)控制。執(zhí)行諸如PID算法等常規(guī)控制,包括單回路、串級(jí)、比值、前饋和均勻等控制,通過(guò)PID自動(dòng)整定軟件調(diào)整其控制參數(shù),充分發(fā)揮其自動(dòng)控制作用。
第二層是先進(jìn)控制(GPC)。通過(guò)改變一組常規(guī)調(diào)節(jié)控制回路的設(shè)定值來(lái)發(fā)揮其控制作用,其目的是協(xié)調(diào)過(guò)程變量交互作用,使生產(chǎn)過(guò)程操作更接近于過(guò)程約束,進(jìn)行卡邊控制。
第三層是優(yōu)化控制(OPT)。綜合分析影響整個(gè)裝置效益的各種因素,把整個(gè)工藝過(guò)程的經(jīng)濟(jì)效益與裝置操作直接連接起來(lái),確定過(guò)程整體的最佳工藝操作條件,然后由先進(jìn)控制來(lái)確保實(shí)現(xiàn),使裝置處于整體最佳運(yùn)行狀態(tài)。
2.2 三層控制之間的聯(lián)系
GPC與OPT是在裝置DCS常規(guī)控制基礎(chǔ)之上的控制系統(tǒng),GPC保證過(guò)程參數(shù)控制的穩(wěn)定,并達(dá)到比常規(guī)控制精度要高的技術(shù)指標(biāo),穩(wěn)定生產(chǎn)、提高產(chǎn)品質(zhì)量;而OPT往往是通過(guò)動(dòng)態(tài)調(diào)整裝置調(diào)節(jié)回路的設(shè)定值,實(shí)現(xiàn)裝置在最優(yōu)狀態(tài)下運(yùn)行。GPC控制是OPT的前提,OPT則通過(guò)將優(yōu)化結(jié)果設(shè)定為GPC的目標(biāo)值來(lái)實(shí)現(xiàn)。
3 PID自動(dòng)整定技術(shù)
常規(guī)控制的關(guān)鍵技術(shù)是PID參數(shù)整定技術(shù),主要克服非線(xiàn)性、參數(shù)時(shí)變性和不確定性和外界干擾等問(wèn)題,特別是當(dāng)控制對(duì)象參數(shù)發(fā)生變化時(shí),PID參數(shù)必須整定適宜,才能實(shí)現(xiàn)精確穩(wěn)定的控制。
PID參數(shù)自動(dòng)整定技術(shù)采用相關(guān)系數(shù)法,通過(guò)相關(guān)系數(shù)法辨識(shí)出系統(tǒng)模型,然后在模型的基礎(chǔ)上進(jìn)行PID尋優(yōu),獲取最佳PID參數(shù)。其工作原理可分為兩步:模型辨識(shí)和PID自動(dòng)整定。
3.1 模型辨識(shí)
對(duì)回路實(shí)時(shí)運(yùn)行數(shù)據(jù)進(jìn)行有效性檢驗(yàn)和必要的處理,得到N 組控制量u(t)和系統(tǒng)輸出y(t);然后用控制量序列{u(t)}激勵(lì)數(shù)學(xué)模型,得到模型輸出ym(t),計(jì)算系統(tǒng)輸出與模型輸出之間的子樣相關(guān)系數(shù)γ[2]:
其中,
子樣相關(guān)系數(shù)越大,系統(tǒng)輸出與模型輸出曲線(xiàn)擬合效果越好;先選定模型結(jié)構(gòu),再采用坐標(biāo)輪換法獲取對(duì)應(yīng)最大子樣相關(guān)系數(shù)的模型參數(shù),作為系統(tǒng)的數(shù)學(xué)模型。
3.2 PID自動(dòng)整定原理
采用極小化二次型目標(biāo)函數(shù)優(yōu)化整定PID 參數(shù),公式如下:
其中,α 為加權(quán)系數(shù),0 ≤α <1,缺省值為0.1;
e(k)=R(k)-Z(k),R(k)為參考軌跡, Z(k)為模型響應(yīng);
M為評(píng)價(jià)域。
3.3 PID自動(dòng)整定在丙烯腈裝置上的應(yīng)用
利用自動(dòng)整定軟件對(duì)丙烯腈裝置丙烯進(jìn)料、丙烯進(jìn)料溫度、丙烯蒸發(fā)器液位和丙烯過(guò)熱器壓力等回路進(jìn)行控制參數(shù)辯識(shí),有效的抑制了控制參數(shù)的波動(dòng),各回路運(yùn)行平穩(wěn),取得了較好的效果。圖2為丙烯進(jìn)料溫度整定前后效果對(duì)比示例。

圖2 丙烯進(jìn)料溫度整定前后效果對(duì)比
4 GPC控制技術(shù)
4.1 GPC控制原理
廣義預(yù)測(cè)控制(GPC,Generalized Predictive Control)采用下列具有隨機(jī)階躍擾動(dòng)非平穩(wěn)噪聲的離散插分方程,即 CARIMA模型:
其中:
yt為t時(shí)刻的系統(tǒng)輸出;
ut為t時(shí)刻的控制量;
d是系統(tǒng)最小純時(shí)延步數(shù);
q-1為向后一步平移因子。
4.2 丙烯腈裝置反應(yīng)溫度GPC控制
針對(duì)現(xiàn)場(chǎng)實(shí)際情況設(shè)計(jì)出了反應(yīng)器溫度和進(jìn)料量的先進(jìn)控制方案。反應(yīng)溫度的主要控制手段是撤熱水,微調(diào)可以通過(guò)丙烯進(jìn)料量實(shí)現(xiàn)。GPC的被控制變量為反應(yīng)溫度,GPC的控制量為丙烯進(jìn)料量的調(diào)整值,這個(gè)調(diào)整值與丙烯進(jìn)料量的設(shè)定值相加作為實(shí)際的丙烯進(jìn)料PID回路設(shè)定值,通過(guò)微量的丙烯流量變化達(dá)到調(diào)整反應(yīng)溫度的效果。同時(shí),當(dāng)微調(diào)丙烯量不能滿(mǎn)足溫度調(diào)整要求時(shí),控制器會(huì)通過(guò)人機(jī)界面給出調(diào)整撤熱水的操作指導(dǎo),由操作人員根據(jù)操作指導(dǎo)完成現(xiàn)場(chǎng)操作,來(lái)進(jìn)行大幅度的溫度調(diào)整。通過(guò)實(shí)際的丙烯進(jìn)料、氨烯比和空烯比計(jì)算氨和空氣進(jìn)料PID回路的設(shè)定值,調(diào)整氨和空氣的進(jìn)料量。而整個(gè)控制系統(tǒng)的輸入?yún)?shù)反應(yīng)器溫度設(shè)定、氨烯比設(shè)定和空烯比等的設(shè)定由優(yōu)化系統(tǒng)的操作指導(dǎo)給出,GPC先進(jìn)控制主結(jié)構(gòu)如圖3所示。
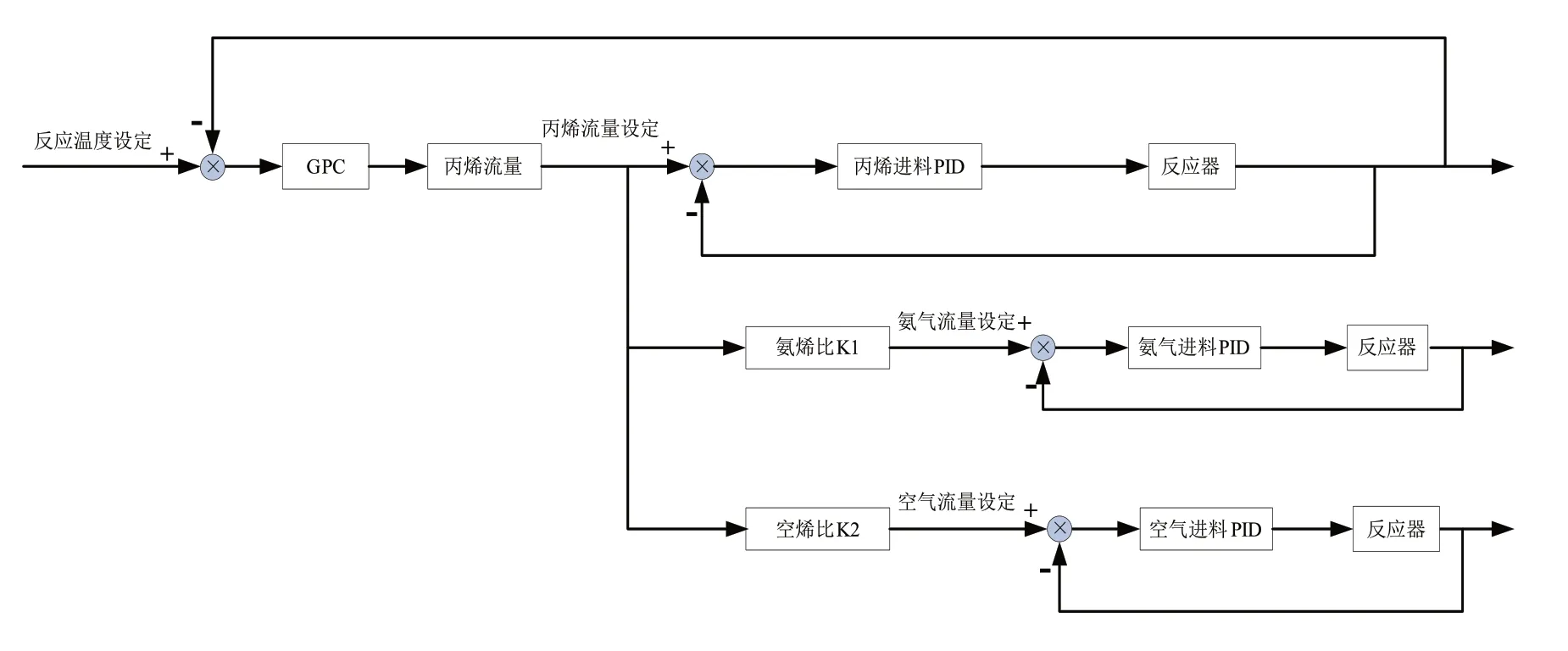
圖3 GPC先進(jìn)控制主結(jié)構(gòu)圖
通過(guò)GPC控制使得反應(yīng)溫度既能及時(shí)響應(yīng)設(shè)定值的變化,同時(shí)也沒(méi)有產(chǎn)生超調(diào)現(xiàn)象,在反應(yīng)溫度穩(wěn)定后,可以將溫度控制在設(shè)定值較小的波動(dòng)范圍內(nèi),控制能力明顯,效果良好,達(dá)到了預(yù)測(cè)控制的目標(biāo)。圖4為GPC實(shí)施前后反應(yīng)溫度運(yùn)行記錄對(duì)比示例,黃色為GPC控制的溫度曲線(xiàn),藍(lán)色為原DCS控制的溫度曲線(xiàn)。
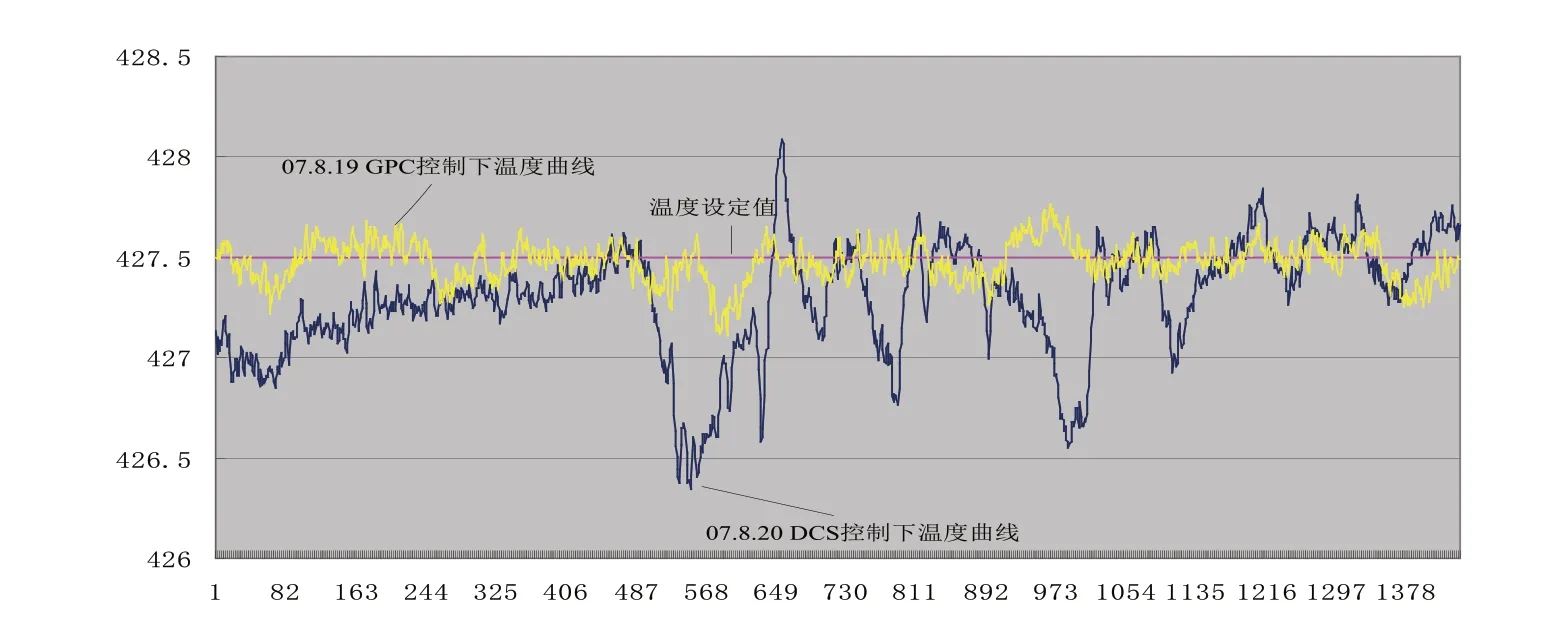
圖4 GPC實(shí)施前后反應(yīng)溫度運(yùn)行記錄對(duì)比
5 操作優(yōu)化技術(shù)
5.1 操作優(yōu)化原理
一個(gè)基本的穩(wěn)態(tài)優(yōu)化問(wèn)題可描述為:
其中,Uv∈Rp,Yv<Rl,Qv與Uv,Yv的關(guān)系是已知的,Uv, Yv,Qv分別為操作因素U ,系統(tǒng)輸出向量Y,目標(biāo)函數(shù)Q的穩(wěn)態(tài)值,優(yōu)化的目標(biāo)即是尋找一組符合約束的操作條件,使目標(biāo)函數(shù)最大。這里假設(shè)等式約束可通過(guò)解方程消去,不等式約束可以通過(guò)在目標(biāo)函數(shù)引入罰函數(shù)而不顯式出現(xiàn)。
考慮到過(guò)程的動(dòng)態(tài)特性且Y與U的關(guān)系往往是非線(xiàn)性的, 將其關(guān)系寫(xiě)為:
在此只研究靜態(tài)部分,即:
利用最速下降法來(lái)尋找下一個(gè)工作點(diǎn):
δ為尋優(yōu)步長(zhǎng);
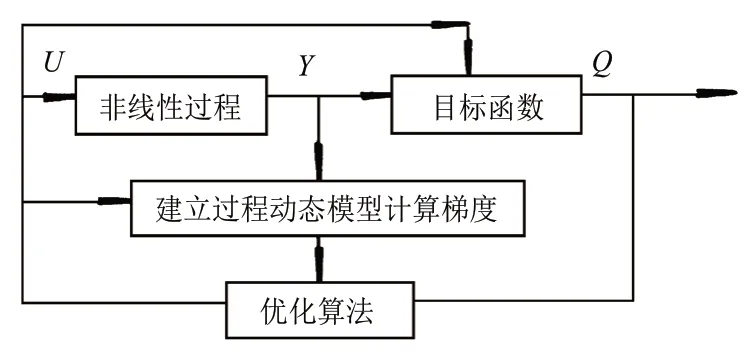
圖5 操作優(yōu)化結(jié)構(gòu)
5.2 丙烯腈裝置反應(yīng)器操作優(yōu)化
通過(guò)工藝分析,選定反應(yīng)溫度、空塔線(xiàn)速、氨烯比、空烯比和反應(yīng)器負(fù)荷作為自變量,采用多元逐步回歸分析方法建立丙烯腈產(chǎn)量的模型f(x),再基于模型用最速上升法計(jì)算反應(yīng)器優(yōu)化操作參數(shù)。
在優(yōu)化計(jì)算中,除了反應(yīng)器操作條件本身的工藝約束外,還需考慮反應(yīng)器出口氣體中尾氧含量的約束以及丙烯醛生成量的約束,分別通過(guò)數(shù)學(xué)模型 g(x)和h(x)計(jì)算獲得。
各數(shù)學(xué)模型如下:
式中x1為反應(yīng)溫度、x2為空塔線(xiàn)速、x3為氨烯比、x4為空烯比、x15為丙烯腈反應(yīng)器負(fù)荷。而別的變量結(jié)合裝置情況,通過(guò)分析研究分別定義為:
6 結(jié)語(yǔ)
基于DCS的丙烯腈反應(yīng)器三層控制系統(tǒng)投運(yùn)后,在一定的反應(yīng)負(fù)荷下,通過(guò)在線(xiàn)優(yōu)化動(dòng)態(tài)修正反應(yīng)器操作參數(shù)相關(guān)設(shè)定值,改良了反應(yīng)器的操作性能,增加了丙烯腈產(chǎn)量,提高了丙烯腈的收率,應(yīng)用效果良好。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
