基于傾斜影像密集匹配點云的建筑物提取
2023-10-18 13:32:24殷嘉媛
科技創(chuàng)新與應(yīng)用 2023年29期
關(guān)鍵詞:建筑
殷嘉媛,袁 楓
(宿遷學(xué)院,江蘇 宿遷 223800)
建筑物是人們?yōu)榱藵M足社會生活需要,利用所掌握的物質(zhì)技術(shù)手段,并運用一定的科學(xué)規(guī)律、風(fēng)水理念和美學(xué)法則創(chuàng)造的人工環(huán)境。建筑物三維模型是攝影測量、計算機視覺、計算機圖形學(xué)等領(lǐng)域的重點研究問題,受到廣泛關(guān)注[1]。隨著數(shù)字城市、智慧城市的快速發(fā)展,建筑物三維模型在城市規(guī)劃、應(yīng)急救援、減災(zāi)、決策輔助及無人駕駛等領(lǐng)域有著越來越多的應(yīng)用需求[2-3]。機載激光雷達、傾斜攝影測量等新型測繪技術(shù)使得建筑物的三維重建相比傳統(tǒng)航測方法在自動化程度、精度、信息豐富程度等方面有了較大的進步[2-4]。
由于激光雷達(LiDAR)點云成本遠高于高分辨率航空或衛(wèi)星影像,所以,利用高分影像提取建筑物仍是建筑物提取的重要手段;同時傾斜航空影像具有建筑物立面可見、遮擋少的特點,是建筑物提取的優(yōu)質(zhì)數(shù)據(jù)源[5-7]。另一方面,傾斜攝影測量技術(shù)得到的場景模型是一個整體,能良好地滿足視覺上的觀感,但不能實現(xiàn)計算機對目標(biāo)對象的識別、屬性的賦予且不利于后期的GIS 應(yīng)用。因此,還需要實現(xiàn)目標(biāo)的語義分割,尤其是建筑物的單體化建模。目前建筑物單體化建模大多是采用在整體模型上交互描繪、編輯的方法,顯然其工作量大、效率低,難以滿足大規(guī)模城市快速、高效建模的需求。
建筑物屋頂主要是由單個或多個平面組成,其輪廓大多為直角類型,據(jù)此本文提出了一種基于傾斜影像密集匹配點云數(shù)據(jù)的建筑物提取方法。首先采用布料模擬點云濾波(Cloth Simulation Filter,CSF)算法對原始點云進行濾波[8],去除地面點,并根據(jù)顏色信息濾除植被點;然后對剩余的點進行平面分割,獲取各個平面片的面積、寬度等幾何屬性及其拓撲關(guān)系,并根據(jù)相關(guān)特征對平面片點云進行優(yōu)化,得到建筑物單體點云;最后采用Alpha Shape 算法獲取單個建筑點云的輪廓點[9],并利用遞歸最小外接矩形(Recursive Minimum Bounding Rectangle,RMBR)算法對建筑輪廓進行規(guī)則化[10],得到規(guī)則化后的建筑物輪廓。
1 傾斜影像密集匹配點云建筑物提取
1.1 傾斜影像密集匹配點云數(shù)據(jù)預(yù)處理
傾斜影像密集匹配點云主要包括地面點、植被點、建筑物點等,通過預(yù)處理濾除地面點、植被點能有效提高后續(xù)建筑物提取的精度。
1.1.1 傾斜影像密集匹配點云濾波
點云濾波主要用于分離地面點和非地面點,是建筑物提取的關(guān)鍵步驟之一。與大多數(shù)為達到較高的精度需設(shè)定復(fù)雜參數(shù)閾值的濾波的算法不同,CSF 濾波算法需要設(shè)置的參數(shù)較少,并且濾波效果較好[8],因此本文采用CSF 濾波方法對傾斜影像密集匹配點云進行濾波。CSF 濾波方法近似于一個單一的物理模擬過程,首先將原始點云倒置,然后將一塊布平鋪于倒置的表面,由于重力自然下垂,布料足夠柔軟并粘貼在地形上,確定布的形狀,即描述地面點。傾斜影像密集匹配點云如圖1 所示,濾波后的地物點云如圖2 所示。
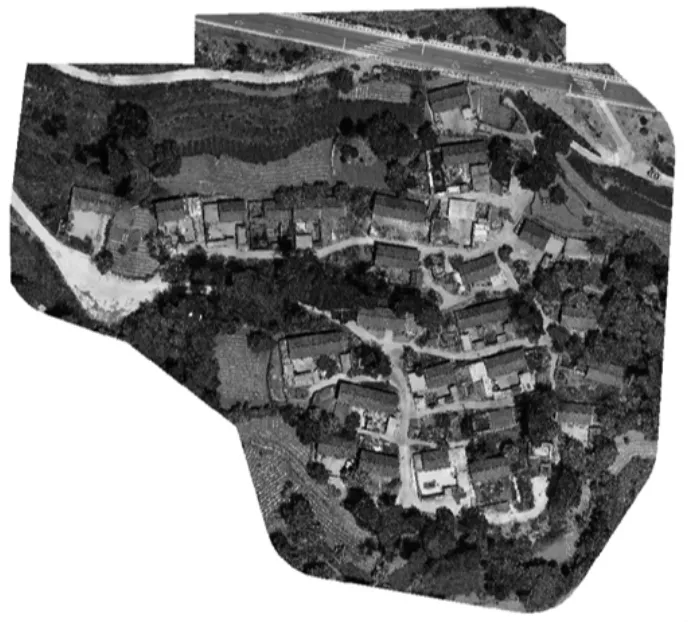
圖1 傾斜影像密集匹配點云

圖2 濾波后地物點云
1.1.2 植被點云剔除
由于高大植被與建筑物存在高度相似、空間相鄰等關(guān)系,從而影響建筑物點精確提取的效果,因此需要從非地面點云中檢測并剔除植被點。通常,傾斜攝影測量系統(tǒng)搭載普通可見光相機,無法得到廣泛應(yīng)用的基于紅-近紅外的植被指數(shù),因此本文采用綠葉指數(shù)(Green Leaf Index,GLI)檢測植被點。綠葉指數(shù)表達式如式(1)所示
式中:R、G、B分別代表點的R、G、B 通道的值。
植被點云剔除的具體過程為:①按照式(1)計算非地面點云中各點的GLI值;②根據(jù)各點的綠葉指數(shù),由最大類間方差(OSTU)方法計算閾值TGLI;③將GLI值大于TGLI的點認為是植被點并剔除。
1.2 建筑物點云精確提取
建筑物屋頂主要是由單個或多個平面組成,因此平面特征是建筑物的主要特征之一。從傾斜影像密集匹配點云中快速、準確地提取出平面,并根據(jù)平面幾何特征等對平面進行篩選、組合等處理,可以得到建筑物屋頂面,進而準確地提取出建筑物。
1.2.1 基于RANSAC 算法的點云快速平面分割
RANSAC 算法作為模型擬合方法的一種,自提出以來,在計算機視覺、攝影測量等領(lǐng)域得到了廣泛的研究與應(yīng)用。基于RANSAC 算法對三維點云進行平面分割的步驟如下。
1)計算最小抽樣數(shù)M。
2)從點云數(shù)據(jù)集中隨機選擇m(m=3)個點并計算平面模型的參數(shù)。
3)對數(shù)據(jù)集中的所有點,計算各點到該平面的距離,若在閾值范圍內(nèi),則將該點歸為內(nèi)點,否則歸為外點。
4)重復(fù)步驟2)、3)M次,統(tǒng)計每次分類后的內(nèi)點數(shù)量,選擇內(nèi)點數(shù)量最大時對應(yīng)的平面參數(shù)為最優(yōu)模型參數(shù)。
5)統(tǒng)計最優(yōu)模型參數(shù)對應(yīng)的局內(nèi)點點數(shù),當(dāng)大于閾值Snum時,對所有局內(nèi)點進行最小二乘擬合,得到最終的平面模型參數(shù);否則跳出循環(huán)將數(shù)據(jù)點集上的點歸為離散點。
6)從點集中剔除內(nèi)點,剩下的點作為下一步處理的點集,重復(fù)步驟2)—6),直到所有的平面都被提取出。
由于點云數(shù)據(jù)量龐大,直接使用隨機采樣一致性算法進行平面分割效率不佳。Schnabel 采用八叉樹數(shù)據(jù)結(jié)構(gòu),并結(jié)合局部采樣等策略對RANSAC 算法進行改進,顯著提高了點云平面分割的效率[11]。本文采用該方法進行點云平面分割,平面分割結(jié)果如圖3 所示。
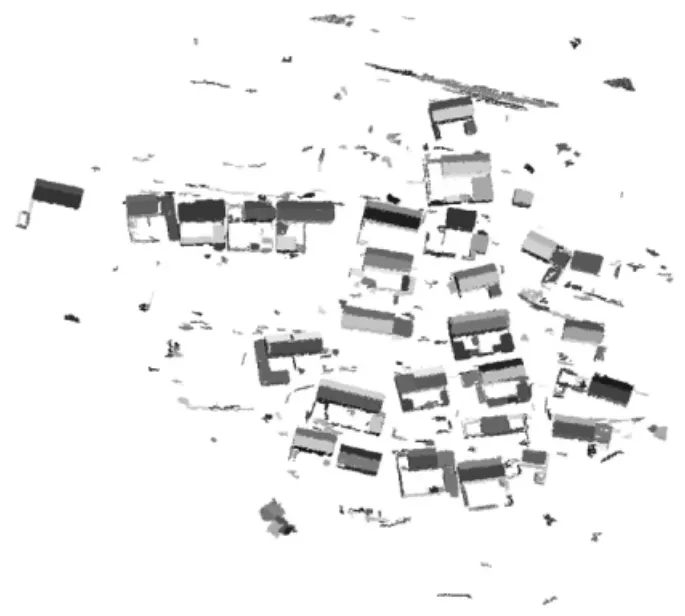
圖3 點云平面分割結(jié)果
1.2.2 基于多特征組合的建筑物點云精確提取
地物點云平面分割后得到的平面片包括建筑屋頂面片、建筑立面面片、其他面片等,因此需要將建筑側(cè)墻面片和其他面片剔除。此外,對于人字型建筑,還需要將相鄰建筑平面片合并,得到完整的單個建筑點云。系統(tǒng)采用多種特征組合的方法實現(xiàn)建筑點云的精確提取,采用的特征主要包括以下幾點。
1)平面法矢量:對于建筑屋頂平面矢量,包括人字型屋頂平面法矢量與豎直方向夾角通常不超過40°,而建筑立面面片的法矢量與豎直方向的夾角通常接近于90°,因此,該特征可有效區(qū)分建筑立面面片。
2)面片寬度:該特征為面片點在地面投影的外接矩形的寬度,用于識別窄狀的非建筑面片。
3)面片投影面積:該特征為面片在地面投影所占的面積,用于識別面積較小的非建筑面片。
4)面片高度:該特征由建筑面片中點的高程和濾波后地面點內(nèi)插高程計算得到,包括面片中點的平均高度、最高高度、最低高度,用于識別高度較低的非建筑面片。
5)面片拓撲關(guān)系:利用Alpha Shape 算法提取每個分割平面片的邊界,根據(jù)邊界間的距離構(gòu)建面片之間的拓撲關(guān)系。對于建筑屋頂面片而言,通常有相鄰的建筑屋頂平面和建筑立面,該特征可有效去除孤立的非建筑面片。此外,計算相鄰面片之間的距離,當(dāng)距離小于閾值時,認為該相鄰面片為相同建筑物面片進行合并,得到單一建筑的點云。
根據(jù)以上平面片特征和拓撲關(guān)系,對平面片進行組合、篩選,可精確提取建筑物點云。
1.3 建筑物輪廓提取與規(guī)則化
從建筑物點云中提取建筑物外輪廓,并進行簡化和規(guī)則化,得到規(guī)則化的建筑物外輪廓,可以為建筑物單體化建模等應(yīng)用提供基礎(chǔ)數(shù)據(jù)。
1.3.1 建筑物輪廓提取
在精確提取出建筑物點云后,本文采用二維Alpha Shape 算法提取建筑物的輪廓點。該方法將建筑物點云投影到水平面上,并采用一個半徑為α 的圓環(huán)進行滾動,從而得到建筑物的邊界離散線段,將首尾相接的線段連接成封閉的多邊形[9],如圖4 所示。其中,半徑α控制了提取輪廓的精細程度。當(dāng)α→∞時,只能得到部分外輪廓點;而當(dāng)α→0 時,點集中每個點將都是輪廓點。一般情況下,參數(shù)α 設(shè)置為平均點間距的2~3倍。
1.3.2 建筑物輪廓規(guī)則化
RMBR 算法是通過一系列最小外接矩形的組合來獲取建筑物輪廓規(guī)則化的算法,適用于直角類型的建筑物的輪廓規(guī)則化[10]。考慮到大多建筑物的輪廓是直角類型,本文在Alpha Shape 提取的輪廓點的基礎(chǔ)上,采用RMBR 算法對建筑物輪廓進行規(guī)則化。基于RMBR 算法對建筑物輪廓規(guī)則化的具體步驟如下(如圖5 所示,其中實線邊框為建筑物初始輪廓和一次細化后的輪廓,虛線邊框為第二級最小外接矩形)。
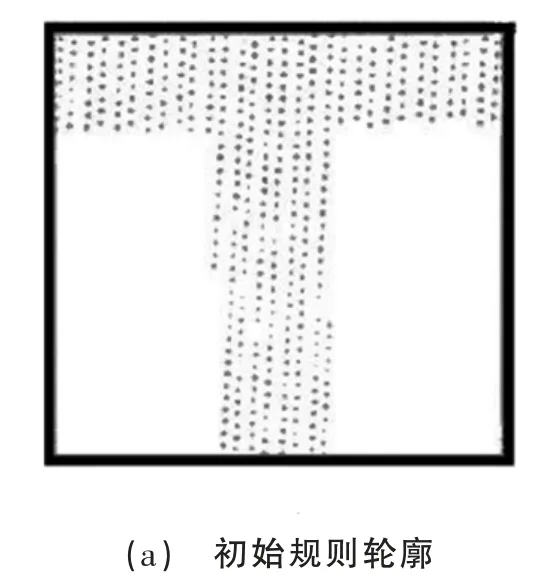
圖5 RMBR 算法原理示意圖
1)確定建筑物的第一層最小外接矩形MBR1。①以輪廓點中任一點為原點,將該點及與其相鄰的輪廓點的連線方向為初始方向,并設(shè)為x軸方向,建立右手坐標(biāo)系,統(tǒng)計各輪廓點在該局部坐標(biāo)系中x方向和y方向上的最大小值,進而構(gòu)建4 個角點分別為(xmin,ymin)、(xmax,ymin)、(xmax,ymax)和(xmin,ymax)的外接矩形;②計算各輪廓點到該矩形4 邊的最近距離,若距離小于閾值(如點云平均間距),認為該點與該外接矩形一致,統(tǒng)計輪廓點中與該外接矩形一致的點數(shù);③以初始方向起始方向,以一定的角度間隔(如10°)為新的x軸方向,構(gòu)建一系列局部坐標(biāo)系,在各個坐標(biāo)系中按照同樣的方法,構(gòu)建外接矩形,并統(tǒng)計與對應(yīng)外接矩形一致的輪廓點點數(shù);④將統(tǒng)計的外接矩形輪廓點點數(shù)最多的外接矩形作為該建筑物的第一層最小外接矩形。
2)確定建筑物的第二層最小外接矩形MBR2。追蹤與上一層最小外接矩形不一致的邊界連線段,若連線段的長度超過閾值,計算各個連線段的最小外接矩形。需要注意的是,除第一層最小外接矩形外,其他層的最小外接矩形可能會有多個。
3)重復(fù)步驟2),得到其他各層的最小外接矩形MBRi,直至滿足精度要求(i≤5)。
4)由遞歸得到的多層最小外接矩形,按照式(2)計算得到規(guī)則化后的建筑物輪廓outline。
2 實驗分析
2.1 實驗數(shù)據(jù)與處理
為了驗證本文從傾斜影像密集匹配點云中提取建筑物方法的可行性,選取某測區(qū)的傾斜影像密集匹配點云數(shù)據(jù)進行試驗。測區(qū)面積約40 000 m2,地形略有起伏,其主要地物是建筑物和植被,其中建筑物大多為人字形屋頂建筑,植被數(shù)量較多且部分與建筑物相鄰接。采用六旋翼無人機搭載索尼5100 相機獲取測區(qū)的傾斜攝影測量影像,通過Context Capture 軟件進行空三、密集匹配等處理,其中密集匹配間隔為0.1 m,得到密集匹配點云共5 128 794 點(如圖1 所示)。
對密集匹配點云進行CSF 濾波和植被點剔除等預(yù)處理后的結(jié)果如圖6 所示,地面點和大部分植被點已被有效濾除,降低了點云分割等后續(xù)處理的數(shù)據(jù)量,并能提高建筑物提取的效果。

圖6 去除植被后地物點云
對預(yù)處理后的點云數(shù)據(jù)進行快速平面分割,并對分割結(jié)果進行優(yōu)化,得到精確的建筑物點云提取結(jié)果如圖7 所示,可以看出,絕大部分建筑均被有效地識別。
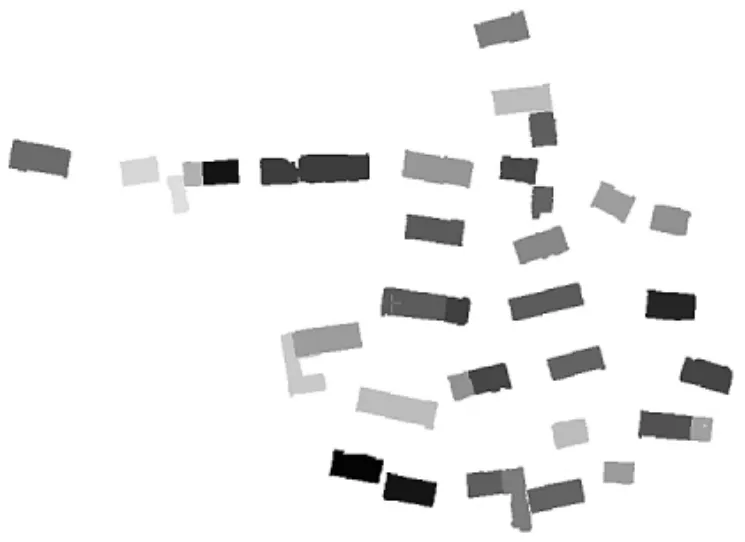
圖7 點云分割優(yōu)化結(jié)果
對優(yōu)化后的建筑物點云數(shù)據(jù),采用Alpha Shape算法提取建筑輪廓點的結(jié)果如圖8 所示,輪廓點規(guī)則化處理結(jié)果如圖9 所示。可以看出,該規(guī)則化方法可以有效地表示直角類型的建筑物。
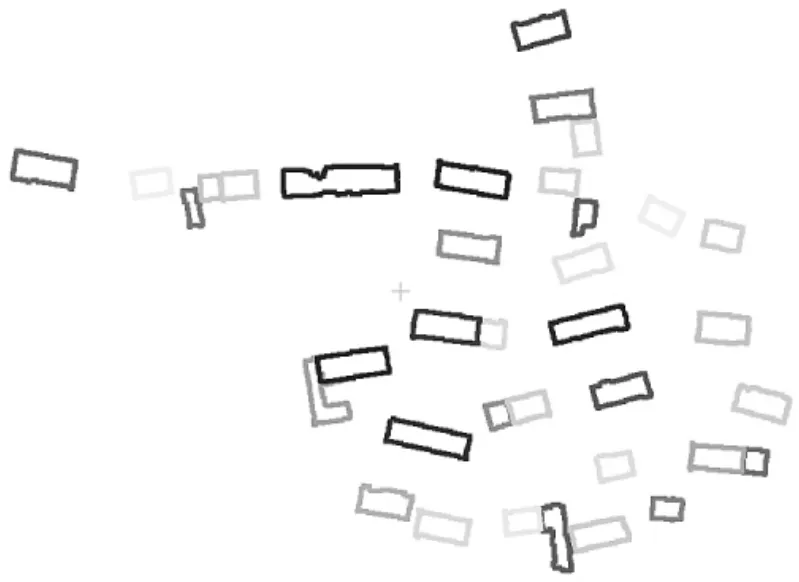
圖8 優(yōu)化后建筑物輪廓點
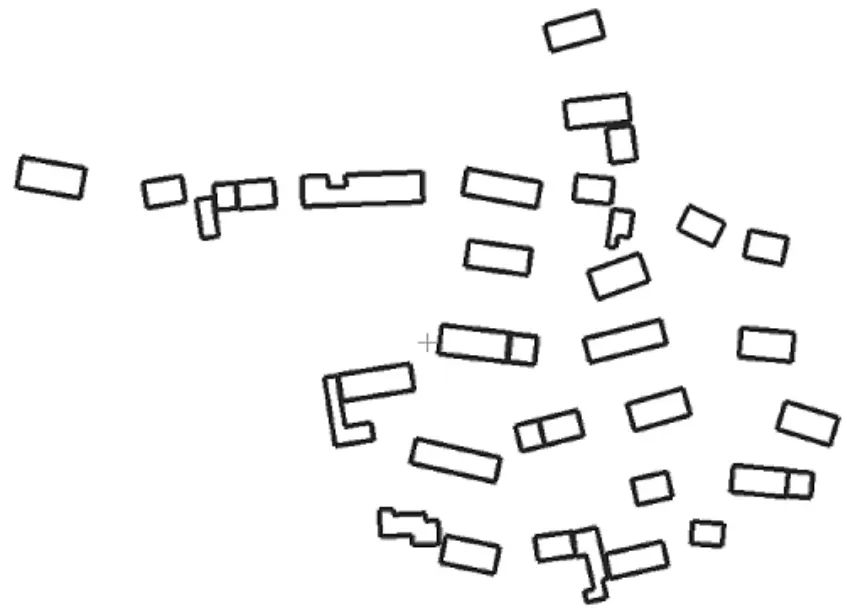
圖9 規(guī)則化后的建筑物輪廓
2.2 實驗結(jié)果分析
為了對建筑物提取結(jié)果進行定量評價,參考圖像分類精度評估方法,采用建筑物提取結(jié)果的對象級精度進行評價,包含正確率和查全率2 個指標(biāo),正確率為正確提取的建筑物單體數(shù)與提取的建筑單體數(shù)的比值,查全率為正確提取的建筑物單體數(shù)與實際建筑物單體數(shù)的比值。其中實際建筑物單體由人工采集,當(dāng)提取的建筑物單體與實際建筑單體相互重疊均超過給定閾值(如70%),認為該建筑物單體提取正確。
本文試驗結(jié)果精度評價結(jié)果見表1,其中人工采集建筑物單體41 個,自動提取建筑物單體38 個,正確率為92.1%,查全率為87.8%,整體精度較好,表明本文方法適用于基于傾斜影像密集匹配點云的建筑物提取。

表1 建筑物提取精度
3 結(jié)束語
本文提出了一種基于傾斜影像密集匹配點云數(shù)據(jù)的建筑物提取方法,該方法基于大多建筑物的屋頂面由平面組成、建筑物外輪廓多為直角類型等特征出發(fā),包含濾波、平面分割、建筑輪廓與規(guī)則化等一系列環(huán)節(jié)。實驗結(jié)果表明,該方法提取的建筑物輪廓能夠有效描述傾斜影像密集匹配點云中的建筑物。隨著建筑物設(shè)計概念的多元化,建筑物屋頂面和輪廓形狀復(fù)雜多樣,后續(xù)將進一步研究適用于復(fù)雜建筑物的輪廓提取方法。
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
文苑(2020年10期)2020-11-07 03:15:36
現(xiàn)代裝飾(2020年6期)2020-06-22 08:43:12
現(xiàn)代裝飾(2020年4期)2020-05-20 08:55:08
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:16
藝術(shù)家(2017年3期)2018-01-26 08:54:49
文學(xué)自由談(2016年3期)2016-06-15 13:01:16
福建農(nóng)業(yè)科技(2016年10期)2016-03-07 09:46:49
少兒科學(xué)周刊·兒童版(2015年6期)2015-11-24 03:49:38
中國工程咨詢(2015年4期)2015-02-14 03:49:56