求解無人機航跡規劃問題的精英引領自適應樽海鞘群算法
2023-10-18 05:06:59王若凡任國鳳
計算機應用研究 2023年9期
王若凡 任國鳳

摘 要:針對目前無人機航跡規劃成本高、精度差和穩定性不足等問題,提出一種精英引領自適應樽海鞘群算法。首先,分別引入精英質心對立學習和精英引導慣性權重機制對樽海鞘領導者和跟隨者更新方式進行改進,提升樽海鞘群算法的全局搜索能力和收斂速度,并設計種群個體角色自適應調整機制均衡算法的全局搜索和局部開發;然后建立無人機二維航跡空間模型和航跡成本模型,將航跡規劃轉換為多維函數優化問題,并利用精英引領自適應樽海鞘群算法求解無人機航跡規劃問題,以綜合考慮威脅成本和燃料成本的航跡目標函數評估個體位置適應度,對航跡規劃最優方案迭代求解。在兩個不同復雜性的威脅場景下進行的仿真實驗結果表明,與人工勢場(APF)、樽海鞘群算法(SSA)、人工蜂群算法(ABA)和改進樽海鞘群算法(ISSA)相比,所提算法的最優航跡平均成本分別可以降低78.68%、61.77%、42.76%和19.36%,驗證了所提算法的有效性。
關鍵詞:航跡規劃; 樽海鞘群算法; 對立學習; 慣性權重; 精英引導; 航跡成本
中圖分類號:TP301.6?? 文獻標志碼:A
文章編號:1001-3695(2023)09-022-2704-09
doi:10.19734/j.issn.1001-3695.2023.02.0017
Track planning method of unmanned aerial vehicles based on elite leading andadaptive salp swarm algorithm
Wang Ruofan, Ren Guofeng
(Dept. of Electronics, Xinzhou Teachers University, Xinzhou Shanxi 034000, China)
Abstract:Aiming at the problems of high cost, poor accuracy and insufficient stability of track planning of unmanned aerial vehicles(UAV) at present, this paper proposed an elite-leading adaptive salp swarm algorithm. This algorithm respectively introduced elite centroid opposition-learning and elite guided inertia weight mechanisms to improve the update method of the leader and the follower of salps, so as to improve global search ability and convergence speed of SSA. It designed an adaptive adjustment mechanism of individual role for population to balance the global search and local development of SSA. This paper established the two-dimensional track space model and the track cost model of UAV, and transformed the track planning into a multi-dimensional function optimization problem. This paper used the proposed algorithm to solve the track planning problem of UAV. It evaluated the individual position fitness by the track target function that comprehensively considered threat cost and fuel cost, and iteratively solved the optimal track planning scheme. This paper carried out the simulation experiments in two threat scenarios with different complexity. The experimental results show that compared with artificial potential field(APF), SSA, artificial bee-colony algorithm(ABA) and improved SSA (ISSA), the proposed algorithm can reduce the optimal track average cost by 78.68%, 61.77%, 42.76% and 19.36% respectively, which verifies the algorithm effectiveness.
Key words:track planning; salp swarm algorithm(SSA); opposite learning; inertia weight; elite leading; track cost
0 引言
無人機(unmanned aerial vehicles,UAV)在軍用和民用領域都得到了廣泛應用。軍用領域中,復雜、危險的作戰任務都可以用無人機替代,它已經成為現代戰爭的必備武器系統之一[1];而在民用領域中,無人運輸、地形勘測、高壓電巡航等[2,3]也已經廣泛應用了無人機技術。無人機應用過程中,航跡規劃是決定飛行器能否順利完成任務的關鍵問題。由于飛行區域會受到威脅物或者障礙物的影響,航跡規劃是指無人機在特定任務環境中,如何有效避開威脅區域和障礙物,能夠搜索到一條起點到終點間威脅小、路徑短且油耗低的最優路徑[4]。
目前,常規無人機航跡規劃方法主要有A*算法[5]、Dijkstra算法[6]、人工勢場(artificial potential field,APF)[7]、快速搜索隨機樹(rapidly-exploring random trees,RRT)算法[8]等,雖然這些方法都是求解無人機航跡規劃的可行方法,但在實際應用中又體現出了一些不足。A*算法的計算量和規劃時間會隨著空間場景規模的增大而劇烈增加;航跡規劃中冗余點過多,降低了算法的搜索效率;Dijkstra算法隨著網絡節點數量的增加會出現搜索效率的顯著下降;人工勢場法在面對復雜威脅環境時航跡規劃容易出現停滯和局部最優解;RRT算法本身具有極大的隨機性,所規劃的航跡會出現明顯拐角或偏離目標方向的繞行,在復雜或威脅區域較密集的環境下航跡代價太高,航跡平滑性不足。為了克服以上方法的不足,智能優化算法因為強大的啟發式搜索機制被用來解決無人機航跡規劃問題,如粒子群(partice swarm optimization,PSO)算法[9]、遺傳算法(gene-tic algorithm,GA)[10]、蟻群算法(ant colony algorithm,ACA)[11]和人工蜂群算法(artificial bee-colony algorithm,ABA)[12]等。這類算法通過模擬自然界中生物體的社會行為對目標進行搜索。然而,粒子群算法和遺傳算法在增加問題復雜度后,這類傳統智能算法迭代較慢,航跡規劃容易產生局部最優。蟻群算法和人工蜂群算法也得到了廣泛應用,但依然無法保證穩定地求解到航跡規劃最優解,算法的穩定性和實時性有待提升。
樽海鞘群算法(salp swarm algorithm, SSA)是一種新型智能優化算法[13],其結構簡單、參數少,能夠有效提升尋優精度,因此在圖像分割[14]、特征選擇[15]、作業調度[16]等問題上得到廣泛應用。然而與同類元啟發式智能優化算法類似,SSA還是存在全局搜索能力、搜索個體質量不穩定以及陷入局部最優的不足。為此,文獻[17]利用Lévy飛行和交叉算子對領導者和跟隨者更新方式進行改進,有效提升了算法的收斂精度和速度;文獻[18]引入鄰域引導、對立學習及自適應移動機制對SSA的搜索精度進行了改進;文獻[19]在領導者位置更新中引入高斯模型,增強算法全局搜索,并在跟隨者位置更新中引入隨機機制提升算法的局部開發能力;文獻[20]利用Lévy飛行機制對算法的搜索和開發能力進行改進,并將改進算法應用于圖像分割中。針對SSA的改進工作取得了一些成效,但在算法的局部開發和全局搜索過程間的平衡、如何避免局部最優及提升全局尋優精度等綜合性能方面仍有提升的空間,尤其在處理復雜優化問題時,SSA的尋優精度和求解效率還有提升空間。為此,本文將從三個方面對SSA進行改進:a)在領導者位置更新上,引入精英質心對立學習機制,避免領導者單一移動方式,提升全局搜索能力;b)在跟隨者位置更新上,引入精英引導下的慣性權重機制,強化精英個體的引導作用,提升算法收斂速度;c)在種群個體角色上,引入自適應調整機制使領導者和跟隨者個體數量隨迭代呈非線性漸變,使算法在不同的迭代周期中均衡地進行全局搜索和局部開發,并以此設計精英引領自適應樽海鞘群算法(elite adaptive salp swarm algorithm,EASSA),將EASSA應用于無人機航跡規劃問題中,利用大規模的對比實驗驗證了算法在求解該問題上的性能優勢和有效性。
4 實驗與結果分析
4.1 基準函數尋優測試
4.1.1 實驗環境配置
實驗硬件環境:CPU為Intel i7 3.4 GHz,內存為8 GB。操作系統為Window 10(64位),仿真平臺為MATLAB 2017a。為了評估EASSA的搜索能力,利用表1所示的八個基準函數對算法進行尋優測試。
其中,f1~f4是單峰函數,在函數曲線的特征上表現為搜索空間內僅存在一個絕對峰值,該類函數側重于驗證算法的尋優精度和收斂速度;f5~f8是多峰函數,在函數曲線的特征上表現為搜索空間內存在多個局部極值,但全局最優解僅有一個,該類函數側重于驗證算法是否能夠脫離局部極值點的束縛,從而開辟新的搜索空間,進一步逼近全局最優解。引入標準SSA[13]、改進SSA(improved SSA,ISSA)[16]、人工蜂群算法(ABA)[12]進行算法的縱橫向對比以驗證算法的有效性。為體現公平性,設置相同的算法參數,公共參數中,種群規模N=30,最大迭代數Tmax=300。EASSA中慣性權重初值wstart=0.5,終值wend=0.1,權重因子κ=0.5;ISSA和ABA的參數與其文獻設置相同。所有算法在每個基準函數上獨立測試20次,并統計算法得到的目標函數平均值、最優值、最差值和標準差,統計結果如表2所示。
4.1.2 實驗結果分析
從表2所示的統計結果可以看出,在單峰函數中,由于函數f2的高維度復雜性,僅有EASSA能得到最優解,三種對比算法均收斂為局部最優解,沒有進一步提高搜索精度。在f1上,EASSA雖未得到理論最優,但搜索精度最高;f3代表的Rosenbrock函數是病態復雜度較高的單峰函數,f4代表的step函數的形狀為階梯式,都極容易得到局部最優,雖然EASSA并未在這兩個函數上找到最優解,但距離四種算法中的最優精度僅相隔數個數量級的差別。這證明在SSA中領導者和跟隨者個體上所引入的精英引導機制能夠提高算法的尋優能力和精度,算法具備很好的競爭力。在多峰基準函數中,這類函數的明顯特征是會分布若干局部極值且位置各異,算法搜索過程中較容易落入局部極值點而不能脫離,因此對于算法的搜索能力有極高的要求。可以看出,在f6、 f7上,EASSA依然可以求解到最優值,具有最高的搜索精度;f8代表的Schwefel函數擁有多個波峰極值,并且這些局部極值點與函數的全局最優點相距甚遠,EASSA通過精英引領下的自適應機制依然能夠擴展種群的搜索范圍,最大限度靠近最優解。在標準差方面,EASSA在多數函數上取值更小,說明算法在處理不同類型、不同形態特征的函數時其尋優性能更加穩定。
圖6所示算法收斂曲線中,EASSA的收斂性能明顯更優。對于函數f1、 f5、 f6、 f8的收斂曲線,EASSA具有明顯的搜索精度的提升,能夠比三種對比算法更快速地接近最優解的區域,對比算法的尋優曲線則始終比較平緩,精度沒有大幅提升,說明EASSA的精英引導機制拓展了搜索空間,得到更多較優的可行解。
選擇基準函數f4對四種算法在不同迭代時期的個體位置進行展示(相同個體位置分布實驗也可以擴充到其他基準函數上進行),結果如圖7所示。種群個體的總數量依然為30,重點觀測迭代早中晚期的個體位置分布圖,故分別設置迭代次數為30、150和250進行展示。個體位置的分布圖可以反映出種群多樣性和不同迭代時期種群的聚集狀態。在迭代早期,EASSA在領導者個體上引入精英質心對立學習機制可以引導種群個體更加均勻地進行分布,比單一的領導者更新方式的SSA對解空間的遍歷性更好。SSA和ABA的種群分布上在整個迭代周期內總體都呈分散狀態,最終處于最優解的個體極少,且SSA在迭代晚期還有部分區域的早熟聚集,為離理論最優解較遠的局部極值點;ABA得到的種群分布在迭代中晚期依然較為分散,收斂較慢;ISSA優于這兩種算法,尤其在迭代晚期,已有不少個體在最優解鄰域聚集,并逐漸靠近最優解。迭代的中晚期,EASSA由于自適應種群個體角色調整機制能夠均衡算法的全局搜索和局部開發能力,使得種群分布已經表現出最佳的聚集性,多數個體已經收斂在全局最優處。
進一步通過消融實驗證明針對SSA的三種改進策略的有效性。將基于精英質心對立學習領導者更新機制的SSA命名為SSA-1,將基于精英引導慣性權重跟隨者更新機制的SSA命名為SSA-2,將種群個體角色自適應調整的SSA命名為SSA-3,再將其與混合三種改進策略的EASSA進行對比,觀測每種策略對算法尋優性能的改進程度。三種消融算法分別針對SSA的不同因素進行了改進,領導者對應于全局搜索能力,跟隨者對應于局部開發,而種群角色調整對應于算法在全局搜索與局部開發間的均衡過程。根據消融實驗的結果表3可以看出,SSA-3算法具有更高的平均搜索精度,表明均衡全局搜索與局部開發能力才能提升智能算法的尋優精度,過度的全局搜索會導致算法收斂速度變慢,而過多的局部開發則可能丟失一些適應度較優的候選解,種群多樣性缺失。總體來看,三種改進策略在SSA的基礎上均能夠提升最終的尋優精度,且在單峰函數和多峰函數上均表現出穩定的性能,策略是有效可行的。
4.2 無人機航跡規劃實驗測試
4.2.1 實驗環境配置
航跡規劃的實驗軟硬件環境與基準函數測試完全相同。本節建立兩個仿真場景進行算法的對比實驗,通過設置不同數量和不同位置的威脅區域實現對算法穩定性和有效性的分析。設置起飛點S的坐標為(25 m,225 m),目標點T的坐標為(500 m,300 m),飛行空間在500 m×500 m范圍內。約束條件設置方面,無人機的飛行速度設為10 m/s,最大轉彎角設為45°。非啟發式算法方面,引入人工勢場法(APF)[7]進行對比,啟發式智能優化算法方面,引入標準SSA[13]、ISSA[16]、ABA[12]進行對比,以滿足對比實驗的全面性。EASSA中,種群規模N=30,航跡維度D=6,插值點數量為100,最大迭代數Tmax=300,慣性權重初值wstart=0.5,終值wend=0.1,權重因子κ=0.5。為了實驗結果的可靠性,將所有實驗仿真獨立進行20次,并記錄均值進行比較。
4.2.2 實驗結果分析
表4給出場景1中關于威脅區域的相關配置,該場景僅設置七個威脅區域,且威脅區域的威脅半徑普遍較小,同時威脅區域之間分布較為分散,這樣算法在搜索路徑時具有更高的概率找到可行解。圖8是五種算法的航跡規劃結果,可以看出,在這種比較簡單的場景中算法均能夠找到可行的航跡規劃結果。從路徑走向上,EASSA找到了最為直接且成本最低的最優航跡路線;APF算法和SSA求解的路徑彎曲點較多,雖然能夠避開障礙物所在區域,但這種較大的轉折角容易造成航跡規劃的不穩定;ISSA和ABA求解的航跡長度仍然高于EASSA,說明路徑不是最佳,得到的是階段性的局部最優航跡。圖9是算法的收斂曲線,APF和SSA的收斂速度最快,但其規劃航跡成本過高,轉折較大且較多;EASSA的收斂速度與ABA相近,且快于ISSA,但從收斂起點看,EASSA的位置明顯要低于這兩種算法,隨著迭代進行能夠快速收斂。
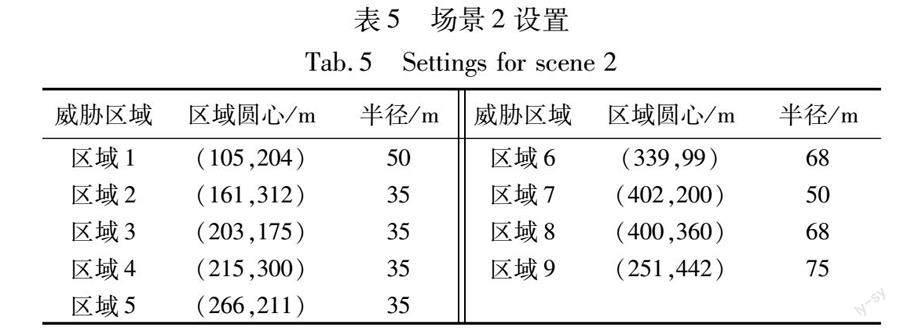
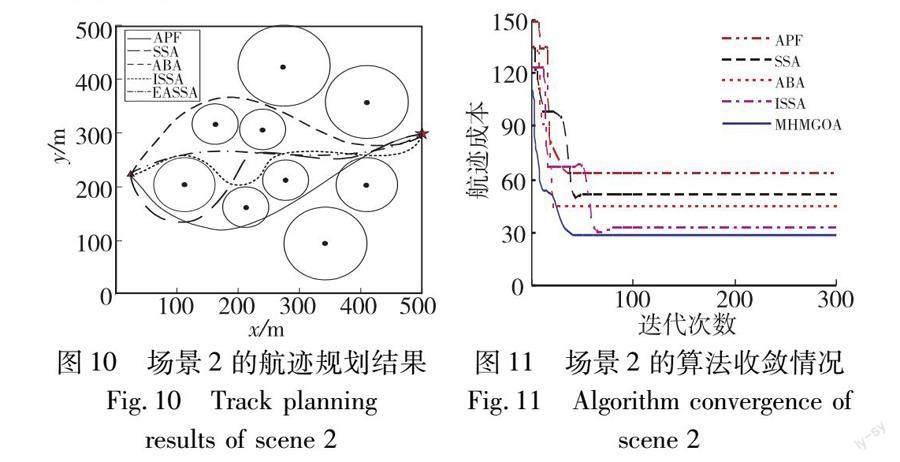
表5給出場景2中關于威脅區域的相關配置。該場景增加威脅區域的數量為9個,且威脅半徑較大的區域有所增加,威脅區域分布也較為密集,明顯增加了算法搜索最優航跡的難度。根據航跡規劃的結果(圖10)可知,由于場景比較復雜,APF算法基本沒有找到安全的航跡,沒有避開兩個威脅區域,相當于發生了障礙碰撞;其他四種智能優化算法都可以找到安全航跡,避開所有障礙物。EASSA所求解的航跡依然是最優的,其他算法無法求解到最優航跡,航跡成本較高,說明算法迭代到一定階段即出現局部最優,未能進一步開辟接近最優航跡的其他空間。
由圖11所示的收斂曲線可知,APF和ABA收斂最快,但其搜索結果是失敗的,航跡成本過高,尤其是APF算法規劃的航跡已經進入兩個威脅區域。EASSA的收斂起點依然最低,與SSA收斂速度相當,但航跡成本更低。綜合以上結果可以看出,在航跡規劃地域復雜性增加的情況下,EASSA更具性能優勢,維持了較快的收斂速度和更低的航跡成本。
為了驗證樽海鞘領導者和跟隨者更新機制對算法搜索最優航跡規劃解的影響,利用SSA-1和SSA-2算法求解航跡規劃解,再與標準SSA求解的方案對比。選擇場景1作為航跡規劃的驗證場景,結果如圖12所示。可以看出,SSA-1算法在迭代前期搜索的航跡與理論最優解的規劃線路契合度較高,說明精英質心對立學習使得算法中領導者的全局尋優能力得到了提升,迭代前期的全局搜索更強;迭代后期種群多樣性缺失,導致規劃航跡偏離較遠,得到了局部最優解。而SSA-2算法以精英引導慣性權重對跟隨者位置進行改進,迭代前期空間廣泛搜索不足,跟隨者的移動方向具有太大盲目性,使得規劃航跡偏離較遠;迭代后期在領導者經過一定代數的搜索之后,得到了適應度較優的候選解,在其牽引下跟隨者能以精英個體進行引導,逐步得到代價更小的航跡。樽海鞘領導者和跟隨者更新機制決定了SSA的搜索機制,結合前文消融實驗中在基準函數測試上得到的目標解以及此處的航跡規劃解,可以有效驗證改進算法的性能提升效果。
為了展示EASSA在求解無人機航跡規劃中通過算法迭代尋優而逐步逼近最優航跡的特點,圖13展示了算法迭代20次、50次和200次得到的航跡規劃解。迭代早期,EASSA的種群個體離最優還較遠,搜索到的航跡規劃可行解的適應度較差,航跡代價較高;隨著算法逐步逼近最優解,規劃航跡代價也逐步減小,至200次迭代時算法已經可以求得最優航跡方案。
表6是求解算法在兩個場景中航跡成本的統計結果。可以看到,EASSA在兩個場景中得到的成本各項統計結果都要優于四種對比算法,且其標準差值更小,表明算法能夠適應于不同的仿真場景,即使增加威脅區域的分布和威脅半徑場景在求解航跡時也能夠求解到最優的航跡,其穩定性更好。通過計算可知,兩個實驗場景中,與APF、SSA、ABA和ISSA相比,EASSA的最優航跡平均成本分別可以降低78.68%、61.77%、42.76%和19.36%。
圖14給出了五種算法在兩種實驗場景下的航跡規劃長度和規劃所需時間,其中,柱狀圖對應左側縱軸,折線圖對應右側縱軸。EASSA得到的規劃航跡最平滑,得到的是航跡規劃的最優解,在較為簡單的場景1中,其航跡長度上比ISSA、ABA、SSA和APF算法分別減少了4.56%、6.21%和7.97%和12.67%。場景2提高了航跡規劃的復雜性,威脅區域分布更加密集,但EASSA表現出更好的穩定性,不僅能夠得到最優航跡,而且長度最短,其航跡長度上比ISSA、ABA、SSA和APF算法分別減少了5.07%、6.38%和8.15%和15.27%,表明復雜性增加的情況下EASSA能夠體現出更好的性能優勢。在算法航跡規劃所需時間上,APF算法需要的時間最少,其次是SSA,但兩種算法的精度較差,規劃航跡離最優解較遠,得到的是局部最優解;ABA效果一般,收斂較慢,也無法得到最優解。EASSA的規劃時間雖高于APF、SSA,但其規劃航跡最優,且EASSA的時間小于ISSA和ABA,說明該算法不僅航跡長度更短,而且效率更高。結合迭代收斂曲線,該算法在迭代初期算法即能得到較小的航跡成本,且在階段性搜索中能夠有效搜索到較好的最優解。
引入文獻[21]將威脅空間模型從規范圓形擴展至不規劃多邊形,即此時障礙物模型為規范圓形和不規則多邊形組成的復雜障礙物威脅場景,此時需要判定航跡點是否在多邊形障礙物內部。對于空間內的一個點(xi,yi),令xmin、xmax和ymin、ymax分別表示多邊形障礙物的頂點坐標在x軸和y軸方向上的最小值和最大值。若點(xi,yi)的橫坐標xi或縱坐標yi不在區間[xmin,xmax]或[ymin,ymax]內,則可以斷定點(xi,yi)不會穿越該多邊形障礙物。當xi∈[xmin,xmax]且yi∈[ymin,ymax]時,如圖15所示,過(xi,yi)作平行于x軸的直線H,直線H與多邊形相交于若干點。若左起第一個交點穿越多邊形,則第二個交點穿出多邊形,第三個交點穿越多邊形,依此類推,直線H與多邊形交點數必為偶數。若(xi,yi)兩側交點數為奇數,可以斷定點(xi,yi)穿越障礙物;否則必在多邊形外部;若多邊形為凸結構,則H與其相交在兩點。若交點位于(xi,yi)兩側,則(xi,yi)穿越障礙物;否則必在多邊形外部。當航跡點穿越障礙物時,當前航跡規劃即為不可行解,算法迭代過程中則不參與下次位置更新。
圖16是在四個規則圓形障礙物和五個多邊形不規則障礙物場景下算法的航跡規劃結果。為了增強算法橫向對比的效果,再引入三種最新的改進智能算法進行對比,包括混沌麻雀搜索算法(chaos sparrow search algorithm,CSSA)[22]、A*初始化變異灰狼優化(A* initialized mutable gray wolf optimizer,AMGWO)算法[23]、自適應郊狼優化算法(self-adaptive coyote optimization algorithm,SACOA)[24]。表7是六種算法的航跡代價統計結果。從規劃航跡的結果可以看出,六種算法都可以找到航跡規劃可行解,均不存在與障礙物的碰撞,但航跡長度及航跡代價并不相同。SSA的航跡長度明顯較長,在五種改進智能優化算法中,CSSA、AMGWO、SACOA三種算法與EASSA算法的航跡線路基本一致,但CSSA、AMGWO和SACOA的規劃航跡無用轉折更多,路徑平滑度不如EASSA,說明算法的搜索精度還有待提升空間,EASSA算法利用精英質心對立學習和精英引導慣性權重機制對全局尋優能力和尋優精度進行了更好的改進。
5 結束語
本文提出了一種基于精英引領自適應樽海鞘群優化的無人機航跡規劃算法。首先,為了提升樽海鞘群算法的尋優性能,分別引入精英質心對立學習和精英引導慣性權重機制對樽海鞘群中領導者和跟隨者的位置更新方式進行了改進,以此提升樽海鞘群算法的全局搜索能力和收斂速度,并以一種自適應機制調整種群個體角色均衡算法的全局搜索和局部開發能力。將本文算法用于求解無人機航跡規劃問題,以綜合考慮威脅成本和燃料成本的航跡目標函數評估個體位置適應度,對最優航跡規劃方案迭代求解。在兩個不同復雜性的威脅場景下進行了仿真實驗,結果表明所提算法可以確保搜索到最優航跡,其航跡成本低于四種對比算法。進一步的研究可嘗試建立不同的障礙物形狀和動態的實時場景,并利用改進算法求解這種更為復雜環境下的無人機航跡規劃問題。
參考文獻:
[1]邱華鑫, 段海濱. 從鳥群群集飛行到無人機自主集群編隊[J]. 工程科學學報, 2017,39(3): 317-322. (Qiu Huaxin, Duan Hai-bin. From collective flight in bird flocks to unmanned aerial vehicle autonomous swarm formation[J]. Chinese Journal of Engineering, 2017,39(3): 317-322.)
[2]Hu Yujiao, Yao Yuan, Ren Qian, et al. 3D multi-UAV cooperative velocity-aware motion planning[J]. Future Generation Computer Systems, 2020,102(2): 762-774.
[3]周林輝. 無人機三維建模在地質調查中的應用研究[J]. 工程勘察, 2022,50(6): 57-62. (Zhou Linhui. Application of UAV 3D modeling in geological survey[J]. Geotechnical Investigation & Surveying, 2022,50(6): 57-62.)
[4]樊嬌, 雷濤, 韓偉, 等. 無人機航跡規劃技術研究綜述[J]. 鄭州大學學報:工學版, 2021,42(3): 39-46. (Fan Jiao, Lei Tao, Han Wei, et al. Survey of UAV path planning[J]. Journal of Zhengzhou University:Engineering Science Edition, 2021,42(3): 39-46.)
[5]孫淑光, 孫濤. 基于融合A*算法的無人機路徑規劃研究[J]. 電子測量技術, 2022,45(9): 82-91. (Sun Shuguang, Sun Tao. Research on UAV path planning based on fusion A* algorithm[J]. Electronic Measurement Technology, 2022,45(9): 82-91.)
[6]李全勇, 李波, 張瑞, 等. 基于改進Dijkstra算法的AGV路徑規劃研究[J]. 機械工程與自動化, 2021,224(1): 23-25,28. (Li Quanyong, Li Bo, Zhang Rui, et al. Research on AGV path planning based on improved Dijkstra algorithm[J]. Mechanical Engineering & Automation, 2021,224(1): 23-25,28.)
[7]涂柯, 侯宏錄, 蘇煒. 改進人工勢場法的無人機避障路徑規劃[J]. 西安工業大學學報, 2022,42(2): 170-177. (Tu Ke, Hou Honglu, Su Wei. Obstacle avoidance path planning of UAV based on improved artificial potential field method[J]. Journal of Xian Technological University, 2022,42(2): 170-177.)
[8]袁一帆, 吳德偉, 戴傳金, 等.基于RRT算法改進的無人機航跡規劃研究[J]. 戰術導彈技術, 2022,215(5): 126-133. (Yuan Yifan, Wu Dewei, Dai Chuanjin, et al. Research on UAVs path planning based on improved RRT algorithm[J]. Tactical Missile Technology, 2022,215(5): 126-133.)
[9]Huang Chenxi, Lan Yisha, Liu Yuchen, et al. A new dynamic path planning approach for unmanned aerial vehicles[J]. Complexity, 2018,2018(1): article No.8420294.
[10]Pehlivanoglu Y V, Pehlivanoglu P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems[J]. Applied Soft Computing, 2021,112(11): 21-35.
[11]宋阿妮, 包賢哲. 精英擴散蟻群優化算法求解運輸無人機三維路徑規劃[J]. 計算機工程與科學, 2021,43(10): 1891-1900. (Song Ani, Bao Xianze. An elite diffusion ant colony optimization algorithm for solving 3D path planning of transportation UAV[J]. Computer Engineering & Science, 2021,43(10): 1891-1900.)
[12]Karaboga D. An idea based on honey bee swarm for numerical optimization: TR-06[R]. Kayseri, Turkey: Erciyes University, 2005: 459-471.
[13]Mirjalili S, Gandomi A H, Mirjalili S Z, et al. Salp swarm algorithm: a bio-inspired optimizer for engineering design problems[J]. Advances in Engineering Software, 2017,114(6): 163-191.
[14]Wang Shikai, Jia Heming, Peng Xiaoxu. Modified salp swarm algorithm based multilevel thresholding for color image segmentation[J]. Mathematical Biosciences and Engineering, 2020,17(1): 700-724.
[15]Shekhawat S S, Sharma H, Kumar S, et al. bSSA: binary salp swarm algorithm with hybrid data transformation for feature selection[J]. IEEE Access, 2021,9: 14867-14882.
[16]趙文超, 郭鵬, 王海波, 等. 改進樽海鞘群算法求解柔性作業車間調度問題[J]. 智能系統學報, 2022,17(2): 376-386. (Zhao Wencao, Guo Peng, Wang Haibo, et al. Improved salp swarm algorithm for scheduling of flexible job shop[J]. CAAI Trans on Intelligent Systems, 2022,17(2): 376-386.)
[17]Jia Heming, Lang Chunbo. Salp swarm algorithm with crossover scheme and Lévy flight for global optimization[J]. Journal of Intelligent & Fuzzy Systems, 2021,40(5): 9277-9288.
[18]王夢秋, 王艷, 紀志成. 基于改進樽海鞘群算法的PMSM多參數辨識[J]. 系統仿真學報,2018,30(11): 4284-4291,4297. (Wang Mengqiu, Wang Yan, Ji Zhicheng. Permanent magnet synchronous motor multi-parameter identification based on improved salp swarm algorithm[J]. Journal of System Simulation, 2018,30(11): 4284-4292,4297).
[19]Qais M H, Hasanien H M, Alghuwainem S. Enhanced salp swarm algorithm:application to variable speed wind generators[J]. Enginee-ring Applications of Artificial Intelligence, 2019,80(4): 82-96.
[20]邢致愷, 賈鶴鳴, 宋文龍. 基于萊維飛行樽海鞘群優化算法的多閾值圖像分割[J]. 自動化學報, 2021,47(2): 363-377. (Xing Zhikai, Jia Heming, Song Wenlong. Lévy flight trajectory-based salp swarm algorithm for multilevel thresholding image segmentation[J]. Acta Automatica Sinica, 2021,47(2): 363-377.)
[21]強寧, 高潔, 康鳳舉. 基于PSO和三次樣條插值的多機器人全局路徑規劃[J]. 系統仿真學報, 2017,29(7): 1397-1404. (Qiang Ning, Gao Jie, Kang Fengju. Multi-robots global path planning based on PSO algorithm and cubic spline[J]. Journal of System Simulation, 2017,29(7): 1397-1404.)
[22]湯安迪, 韓統, 徐登武, 等. 基于混沌麻雀搜索算法的無人機航跡規劃方法[J]. 計算機應用, 2021,41(7): 2128-2136. (Tang Andi, Han Tong, Xu Dengwu, et al. Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm[J]. Journal of Computer Applications, 2021,41(7): 2128-2136.)
[23]曹建秋, 張廣言, 徐鵬. A*初始化的變異灰狼優化的無人機路徑規劃[J]. 計算機工程與應用, 2022,58(4): 275-282. (Cao Jianqiu, Zhang Guangyan, Xu Peng. A* initialized mutable gray wolf optimizer for UAV path planning[J]. Computer Engineering and Applications, 2022,58(4): 275-282.)
[24]陳都, 孟秀云. 基于自適應郊狼算法的無人機離線航跡規劃[J]. 系統工程與電子技術, 2022,44(2): 603-611. (Chen Du, Meng Xiuyun. UAV offline path planning based on self-adaptive co-yote optimization algorithm[J]. Systems Engineering and Electronics, 2022,44(2): 603-611.)
收稿日期:2023-01-27;修回日期:2023-03-15? 基金項目:山西省教育廳高等學校教改創新項目(J2021572)
作者簡介:王若凡(1985-),女,山西繁峙人,實驗師,碩士,主要研究方向為電子與通信工程;任國鳳(1979-),女(通信作者),山西忻州人,教授,博士,主要研究方向為信號處理、智能優化(xiangybb@163.com).