快速路匝道入口智能網聯車協同合并控制研究
2023-10-18 05:40:08朱少杰王文格
計算機應用研究 2023年9期
朱少杰 王文格

摘 要:針對快速路匝道入口場景在高車流量的情況下容易發生交通擁堵的問題,提出了一種快速路匝道入口智能網聯車(connected and automated vehicles,CAV)協同合并控制的解決方案,將問題解耦成多車順序決策和車輛運動規劃兩部分。其中多車順序決策對通行效率起到重要作用,因此設計了一種基于狀態評價模型(state evaluation model,SEM)的多車順序決策算法。該算法首先建立狀態空間并初始化,考慮通行效率和車輛延遲設計狀態評價函數,通過狀態轉移關系選擇出最優狀態,最終回溯得到最優通行順序。根據車輛狀態和到達沖突點時間,控制器實時推導各車輛縱向速度的解析解,實現車輛運動規劃。仿真和實驗結果表明,該方案在滿足交通系統實時性要求的同時能有效提高快速路匝道入口的通行效率,縮短車輛延遲,降低燃油消耗。
關鍵詞:智能網聯汽車; 協同合并控制; 多車順序決策; 快速路匝道入口
中圖分類號:U495;TP391.9?? 文獻標志碼:A
文章編號:1001-3695(2023)09-029-2755-05
doi:10.19734/j.issn.1001-3695.2023.02.0053
Cooperative merging control of connected and automatedvehicles at freeway on-ramp entrance
Zhu Shaojie, Wang Wenge
(College of Mechanical & Vehicle Engineering, Hunan University, Changsha 410082, China)
Abstract:Aiming at the problem of traffic congestion in freeway on-ramp entrance under the condition of high traffic flow, this paper proposed a cooperative merging control solution of CAV at freeway on-ramp entrance, which divided the problem into multi-vehicle sequential decision making and vehicle motion planning. Multi-vehicle sequential decision making played an important role in traffic efficiency, so this paper proposed a multi-vehicle sequential decision algorithm based on SEM. This algorithm firstly established the state space and initialization, designed the state evaluation function by considering the traffic efficiency and the vehicle delay. It selected the optimal state through the state transition relationship, and finally got the optimal passing order by backtracking. According to the state of the vehicles and the time to reach the conflict point, the controller deduced the analytic solution of the longitudinal velocity of each vehicle in real time to realize the vehicle motion planning. Simulation and experiment results show that the solution can not only meet the real-time requirements of the traffic system, but also effectively improve the efficiency of freeway on-ramp entrance, shorten vehicle delay and reduce fuel consumption.
Key words:connected and automated vehicles; cooperative merge control; multi-vehicle sequential decision; freeway on-ramp entrance
0 引言
匝道是連接主車道以及其他道路的重要節點,特別是匝道合并區對主道交通流平穩運行起到重要作用。匝道合并區交通量突然增大容易導致交通擁堵,使得車輛頻繁啟停甚至長時間滯留,將造成額外的燃料消耗以及尾氣排放[1]。
面對這些存在的問題,各國都在不斷發展智能網聯技術,通過先進的傳感器和車聯網通信技術(vehicle-to-everything,V2X)使得車輛能夠實時獲取相鄰車輛的駕駛信息并接收中央控制器的指令[2],可以提前為CAV分配順序并規劃車輛運動軌跡,實現協同合并,保障車輛安全、舒適、節能、高效行駛,從而減少交通延誤和燃油消耗[3],能有效解決交通擁堵問題[4]。
研究人員發現,出入口匝道的無序合并是造成交通擁堵的主要原因之一,其中合并問題的關鍵在于確定最優合并順序[5]。Dresner等人[6]提出了一種基于預約查詢的交叉口管理系統算法(autonomous intersection management,AIM),按照先進先出(first-in-first-out,FIFO)規則對預約進行管理,該方法雖然能快速地在線計算,卻不能保證通行順序是全局最優的。Xu等人[7]提出了一種基于分組的協同駕駛策略,根據車輛間距設計自適應分組閾值,在較少計算開銷下保證了較高的通行效率。Ding等人[8]提出了一種基于規則的調整算法,通過動態調整車輛次序,實現較高的通行效率,并且通過考慮能耗的運動規劃算法降低燃油消耗,但是仍然無法保證結果的最優性。Li等人[9]提出了樹搜索算法,通過樹狀結構表示通行順序的狀態空間,結合剪枝規則優化車輛通行順序,如分支定界法[10]、蒙特卡羅樹搜索算法[11]等。Li等人[12]提出了一種批處理框架,遵循先到先得規則、數值求解小尺度的集中式最優控制問題。Xie等人[13]以所有車輛的速度之和作為優化目標,對主道和匝道車輛的通行順序和軌跡進行優化。為了獲得較優的通行順序,這些算法需要花費很大的計算開銷,難以滿足交通系統的實時性要求[14]。Rios-Torres等人[15]研究了車輛在合并道路時的最優協調問題,提出了集中式的優化框架和解析的封閉形式的解決方案,旨在優化燃油消耗,按FIFO的規則對新進入的車輛排序。目前對快速路匝道協同合并雖然已提出了一些解決方案,但這些方案并不能很好地考慮通行效率、車輛延遲、燃油消耗以及計算成本等問題。本文對快速路匝道入口的多車協同合并問題提出了一種解決方法,該方法將多車協同問題解耦為多車順序決策和車輛運動規劃兩部分,多車順序決策保證通行效率、車輛延遲最優,車輛運動規劃保證能量消耗最優。通過仿真和微縮平臺實車實驗證明了該方法能有效提高通行效率,降低車輛延遲和燃油消耗,同時滿足計算實時性要求。
1 快速路匝道入口協同合并模型建立
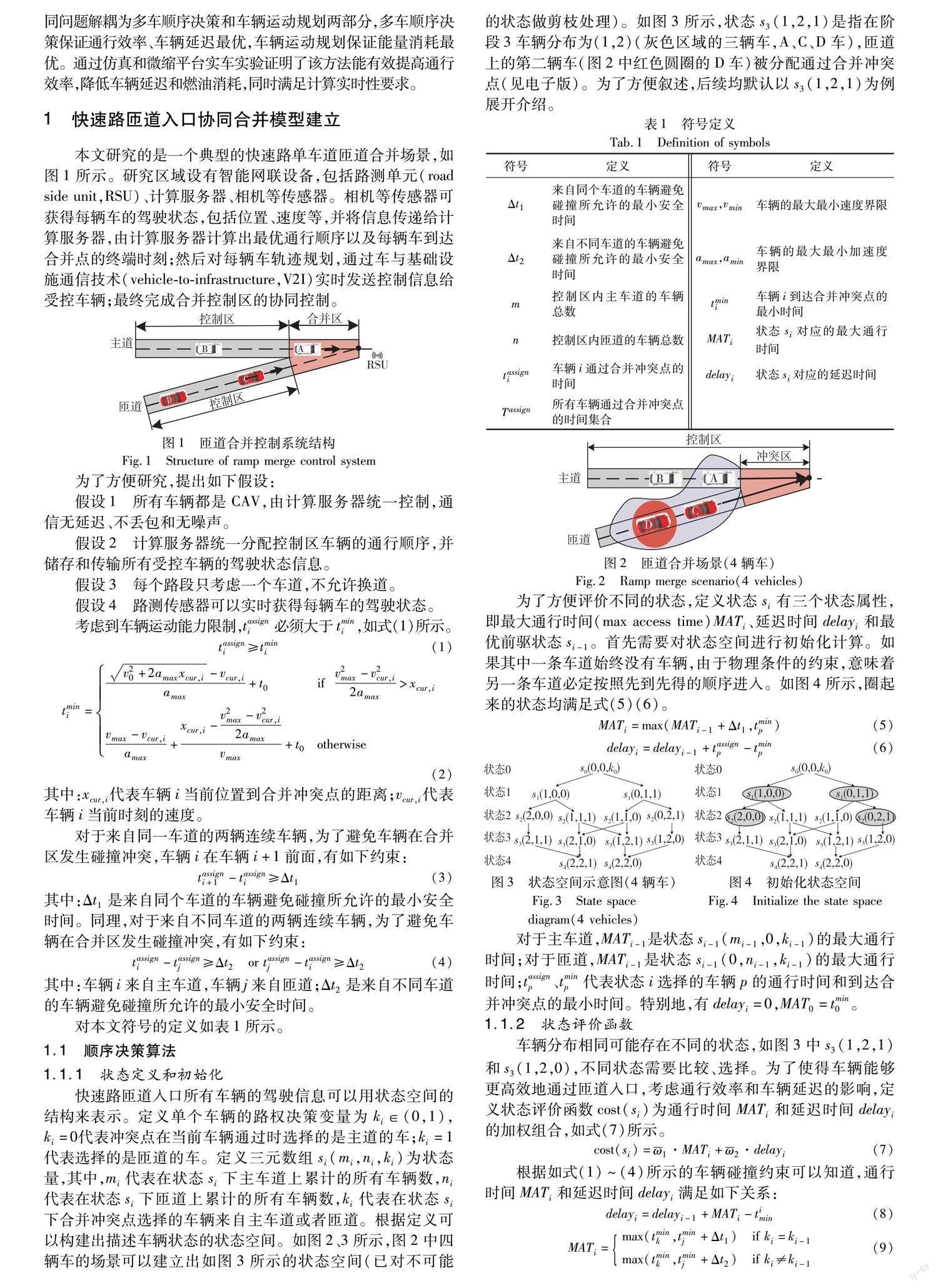
本文研究的是一個典型的快速路單車道匝道合并場景,如圖1所示。研究區域設有智能網聯設備,包括路測單元(road side unit,RSU)、計算服務器、相機等傳感器。相機等傳感器可獲得每輛車的駕駛狀態,包括位置、速度等,并將信息傳遞給計算服務器,由計算服務器計算出最優通行順序以及每輛車到達合并點的終端時刻;然后對每輛車軌跡規劃,通過車與基礎設施通信技術(vehicle-to-infrastructure,V2I)實時發送控制信息給受控車輛;最終完成合并控制區的協同控制。
2.2 仿真結果分析
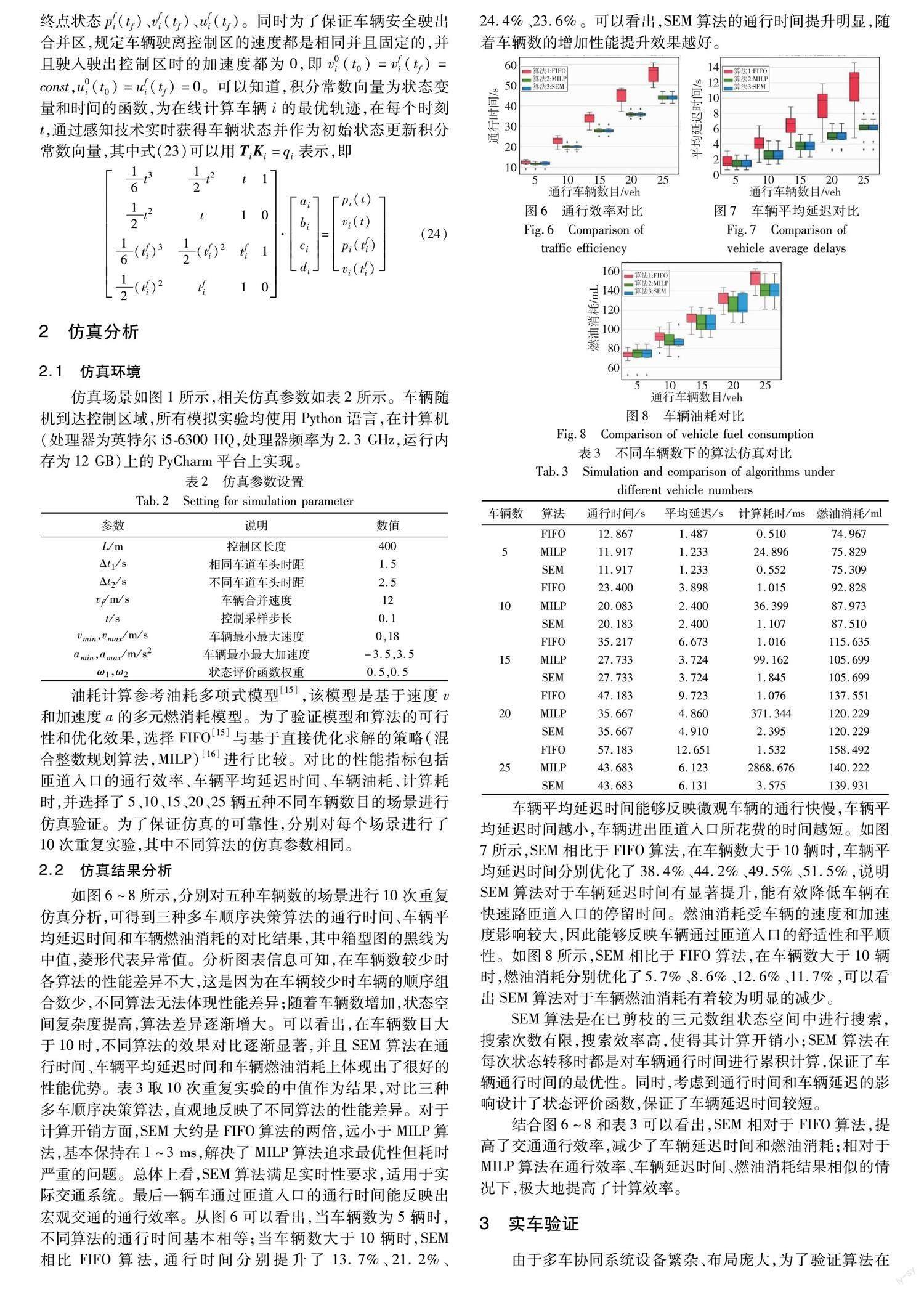
如圖6~8所示,分別對五種車輛數的場景進行10次重復仿真分析,可得到三種多車順序決策算法的通行時間、車輛平均延遲時間和車輛燃油消耗的對比結果,其中箱型圖的黑線為中值,菱形代表異常值。分析圖表信息可知,在車輛數較少時各算法的性能差異不大,這是因為在車輛較少時車輛的順序組合數少,不同算法無法體現性能差異;隨著車輛數增加,狀態空間復雜度提高,算法差異逐漸增大。可以看出,在車輛數目大于10時,不同算法的效果對比逐漸顯著,并且SEM算法在通行時間、車輛平均延遲時間和車輛燃油消耗上體現出了很好的性能優勢。表3取10次重復實驗的中值作為結果,對比三種多車順序決策算法,直觀地反映了不同算法的性能差異。對于計算開銷方面,SEM大約是FIFO算法的兩倍,遠小于MILP算法,基本保持在1~3 ms,解決了MILP算法追求最優性但耗時嚴重的問題。總體上看,SEM算法滿足實時性要求,適用于實際交通系統。最后一輛車通過匝道入口的通行時間能反映出宏觀交通的通行效率。從圖6可以看出,當車輛數為5輛時,不同算法的通行時間基本相等;當車輛數大于10輛時,SEM相比FIFO算法,通行時間分別提升了13.7%、21.2%、24.4%、23.6%。可以看出,SEM算法的通行時間提升明顯,隨著車輛數的增加性能提升效果越好。
車輛平均延遲時間能夠反映微觀車輛的通行快慢,車輛平均延遲時間越小,車輛進出匝道入口所花費的時間越短。如圖7所示,SEM相比于FIFO算法,在車輛數大于10輛時,車輛平均延遲時間分別優化了38.4%、44.2%、49.5%、51.5%,說明SEM算法對于車輛延遲時間有顯著提升,能有效降低車輛在快速路匝道入口的停留時間。燃油消耗受車輛的速度和加速度影響較大,因此能夠反映車輛通過匝道入口的舒適性和平順性。如圖8所示,SEM相比于FIFO算法,在車輛數大于10輛時,燃油消耗分別優化了5.7%、8.6%、12.6%、11.7%,可以看出SEM算法對于車輛燃油消耗有著較為明顯的減少。
SEM算法是在已剪枝的三元數組狀態空間中進行搜索,搜索次數有限,搜索效率高,使得其計算開銷小;SEM算法在每次狀態轉移時都是對車輛通行時間進行累積計算,保證了車輛通行時間的最優性。同時,考慮到通行時間和車輛延遲的影響設計了狀態評價函數,保證了車輛延遲時間較短。
結合圖6~8和表3可以看出,SEM相對于FIFO算法,提高了交通通行效率,減少了車輛延遲時間和燃油消耗;相對于MILP算法在通行效率、車輛延遲時間、燃油消耗結果相似的情況下,極大地提高了計算效率。
3 實車驗證
由于多車協同系統設備繁雜、布局龐大,為了驗證算法在真實場景下的可行性和優化性能,按11.1∶1搭建了微縮實驗平臺,如圖9所示。微縮平臺的硬件結構組成包括五輛阿克曼轉向小車,全局視覺定位相機,模擬快速路匝道入口的場景板、服務器主機等。微縮平臺的軟件組成包括全局視覺定位算法、車輛控制算法、多車協同控制算法、機器人操作系統(robot operating system, ROS)等。
所有車輛的位置和速度均由全局視覺定位相機實時獲取。服務器獲取到所有車輛的狀態后,多車協同控制算法計算出最優多車合并順序,根據最優順序可計算得到每輛車的控制量,通過通信模塊(其中小車和服務器的通信是Wi-Fi通信,小車和小車的通信是ROS通信)由服務器統一發送給每輛車;車輛接收到信息后,單獨執行控制量,最終完成閉環控制。通過仿真分析可知,SEM算法在結果上接近于MILP的結果,因此實車驗證時只與FIFO算法進行對比。實驗場景模擬快速路匝道入口,車輛初始位置隨機擺放,如圖10所示。為了增加實驗的豐富性,設置了五種不同的車輛分布。由于實驗小車為縮放后的模型并且車輛數有限,所以對比指標只選取了通行時間和車輛平均延遲時間,車輛燃油消耗和計算耗時可忽略不計。實驗結果如表4所示,可以看出,SEM相對于FIFO算法,在車輛分布1~5的場景下,通行時間分別優化了25.3%、25.6%、16.6%、13.3%、19.3%,車輛平均延遲時間分別優化了38.2%、36.3%、16.3%、13.3%、22.0%。實車實驗結果表明,SEM算法能夠有效地優化車輛通過匝道入口的通行時間,并且能夠明顯縮短車輛平均延遲時間,與仿真結果基本一致。
4 結束語
為了提高快速路匝道入口的通行效率,本文提出了一種協同合并控制的解決方案,將問題解耦為多車順序決策和車輛運動規劃兩部分,設計了一種基于狀態評價模型的多車順序決策算法,推導了車輛縱向速度的解析解實現車輛運動規劃。為驗證該算法的有效性和優越性,進行了仿真分析,設計了不同車輛數目的場景,與經典的FIFO算法和直接優化求解的MILP算法進行了對比。結果表明,該算法在車輛數目較多的場景下能有效提升通行效率、降低車輛延遲和燃油消耗,最高分別可達24.4%、51.5%、12.6%,性能結果和最優解基本接近,并且計算耗時在1~3 ms,可滿足實時性要求。為驗證算法在真實場景下的可行性和優化性能,搭建了微縮實驗平臺以進行實車實驗,實驗結果也表明該算法對通行效率、車輛延遲有著明顯的優化效果,最高分別可達25.3%、38.2%,為快速路匝道入口的多車協同問題提供了一個有效的解決方案。未來筆者將對快速路匝道入口協同問題做進一步研究,放寬純CAV的模型假設,考慮人類駕駛車輛和CAV混行的交通場景,通過預測算法將人類駕駛的行為添加到順序決策算法中以進一步完善算法,提高算法的魯棒性。
參考文獻:
[1]劉暢. 匝道合流區智能網聯多車協調規劃與控制研究[D]. 南京: 東南大學, 2021. (Liu Chang. Coordination and control of multiple connected and automated vehicles for cooperative on-ramps merging[D]. Nanjing: Southeast University, 2021.)
[2]李克強, 戴一凡, 李升波, 等. 智能網聯汽車 (ICV) 技術的發展現狀及趨勢[J]. 汽車安全與節能學報, 2017,8(1): 5-18. (Li Keqiang, Dai Yifan, Li Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017,8(1): 5-18.)
[3]Hu Zhanyi, Huang Jin, Yang Zeyu, et al. Embedding robust constraint-following control in cooperative on-ramp merging[J]. IEEE Trans on Vehicular Technology, 2021,70(1): 133-145.
[4]關小魁,胡茂彬. 智能網聯汽車基于分組交替的協同合并策略[J]. 汽車安全與節能學報,2022,13(3):482-488. (Guan Xiaokui,Hu Maobin. Grouping-alternation-based cooperative merging strategy for connected and automated vehicles[J].Journal of Automotive Safety and Energy, 2022,13(3): 482-488.)
[5]Meng Yue, Li Li, Wang Feiyue, et al. Analysis of cooperative dri-ving strategies for non-signalized intersections[J]. IEEE Trans on Vehicular Technology, 2018,67(4): 2900-2911.
[6]Dresner K, Stone P. Multiagent traffic management: a reservation-based intersection control mechanism[C]//Proc of the 3rd International Joint Conference on Autonomous Agents and Multiagent Systems. Piscataway, NJ: IEEE Press, 2004: 530-537.
[7]Xu Huile, Feng Shuo, Zhang Yi, et al. A grouping-based cooperative driving strategy for CAVs merging problems[J]. IEEE Trans on Vehicular Technology, 2019,68(6): 6125-6136.
[8]Ding Jishiyu, Li Li, Peng Huei, et al. A rule-based cooperative merging strategy for connected and automated vehicles[J]. IEEE Trans on Intelligent Transportation Systems, 2020,21(8): 3436-3446.
[9]Li Li, Wang Feiyue. Cooperative driving at blind crossings using intervehicle communication[J]. IEEE Trans on Vehicular Technology, 2006,55(6): 1712-1724.
[10]Yang Kaidi, Guler S I, Menendez M. Isolated intersection control for various levels of vehicle technology: conventional, connected, and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2016,72(11): 109-129.
[11]Xu Huile, Zhang Yi, Li Li, et al. Cooperative driving at unsignalized intersections using tree search[J]. IEEE Trans on Intelligent Transportation Systems, 2020,21(11): 4563-4571.
[12]Li Bai, Zhang Youmin, Acarman T, et al. Lane-free autonomous intersection management: a batch-processing framework integrating re-servation-based and planning-based methods[C]//Proc of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2021: 7915-7921.
[13]Xie Yuanchang, Zhang Huixing, Gartner N H, et al. Collaborative merging strategy for freeway ramp operations in a connected and auto-nomous vehicles environment[J]. Journal of Intelligent Transportation Systems, 2017,21(2): 136-147.
[14]Ge Qiang, Sun Qi, Wang Zhen, et al. Real-time coordination of connected vehicles at intersections using graphical mixed integer optimization[J]. IET Intelligent Transport Systems, 2021,15(6): 795-807.
[15]Rios-Torres J, Malikopoulos A A. Automated and cooperative vehicle merging at highway on-ramps[J]. IEEE Trans on Intelligent Transportation Systems, 2017,18(4): 780-789.
[16]姚志洪, 蔣陽升, 胡蓉, 等. 基于混合整數規劃的智能網聯車沖突區時序優化模型[J]. 控制與決策, 2021,36(3): 705-710. (Yao Zhihong, Jiang Yangsheng, Hu Rong, et al. Mixed integer programming model of scheduling for connected automated vehicles in a conflict zone[J]. Control and Decision, 2021,36(3): 705-710.)
收稿日期:2023-01-28;修回日期:2023-03-13
作者簡介:朱少杰(1998-),男,福建漳州人,碩士研究生,主要研究方向為智能網聯車;王文格(1966-),男(通信作者),湖南華容人,教授,博士,主要研究方向為智能網聯車、機器人(wangwg@hnu.edu.cn).