復合工況下平順性優化體系的建立及仿真驗證
2023-10-19 07:11:40高潔,陳克
汽車實用技術 2023年19期
關鍵詞:優化
高 潔,陳 克
復合工況下平順性優化體系的建立及仿真驗證
高 潔1,陳 克2
(1.大連交通技師學院(大連市交通口岸職業技術學校)軌道交通系,遼寧 大連 116013; 2.沈陽理工大學 汽車與交通學院,遼寧 沈陽 110159)
平順性優化是提升車輛性能的重要途徑。文章基于正交試驗設計,建立復合工況下平順性優化體系。選擇平順性綜合評價值和懸架參數作為優化目標和優化變量,確定約束條件和因素水平,編制試驗方案。采用仿真試驗研究法,完成復合工況下的平順性試驗,分析懸架參數不同因素水平對平順性影響的主次關系。研究結果表明,復合工況能綜合考慮路況條件和車速影響,反映車輛真實行駛狀態,懸架參數的最優組合使整車平順性得到綜合提升,驗證了平順性優化體系的合理性和可行性。
平順性;正交試驗設計;綜合評價;仿真試驗研究法;復合工況
提升駕乘舒適度[1]、改善車輛平順性是在研車型設計和舊款車型升級改造的關鍵。在影響平順性的諸多因素中,懸架作為重要的傳力連接裝置,對提升平順性影響直接、操作可行、效果明顯。在反映真實行車狀態的復合工況下,選擇科學的優化方法,建立合理的優化體系,分析車輛懸架系統的最佳參數匹配條件,對改善汽車平順性有重要的實際意義。
復合工況下的汽車平順性優化體系是采用試驗設計方法[2-4],依據正交試驗設計思路[5-7],構建一個目標變量明確、參數條件限定、方案執行合理的優化程序[8-9],用以解決不同路面工況、不同車速條件、不同測量點等復合試驗工況下平順性的優化問題,確保優化的系統性、全面性和可靠性。
本課題將依據正交試驗設計理論,首先,建立復合試驗工況下平順性優化體系,選擇平順性綜合評價值和懸架彈簧剛度曲線值、減振器阻尼曲線值作為優化目標和優化變量,確定5個相關的約束條件,并以±10%和±20%浮動已設定的優化變量值,確定4個因素水平,選擇16(45)正交表,編制16組試驗方案,通過對獲取的試驗數據進行計算處理,分析懸架系統中不同因素對平順性的影響程度,得出研究車輛在復合試驗工況下行駛時,懸架系統各性能參數的最優組合情況。接著,在指定復合工況下完成平順性仿真試驗,通過數據對比,驗證平順性優化體系的合理性和可行性。
1 平順性非線性仿真試驗系統
1.1 整車仿真模型
以某型運動型多功能車(Sports Utility Vehicle, SUV)為研究對象,基本參數如表1所示。
聯合HyperMesh、ANAS、PreSys/VPG等虛擬仿真技術,建立整車非線性仿真模型,如圖1所示。整車裝配后,經統計,整車仿真模型共有538 135個節點,540 720個單元模塊,其中梁單元32個,殼單元527 149個,實體單元13 308個,質量單元231個。經測算,模型總質量為1 620.3 kg,前軸載荷46%,后軸載荷54%,該數據與實車參數相匹配,符合仿真試驗條件。
表1 車輛基本參數
參數參數值參數參數值 整備質量/kg1 620軸距/mm2 660 排量/L2.4前輪距/mm1 560 長(mm)×寬(mm)×高(mm)4 630×1 855×1 720后輪距/mm1 560 前懸架類型麥弗遜式獨立輪胎規格225/65 R17 后懸架類型雙叉臂式獨立徑向剛度/(N/mm)325 前懸架軸荷/kg854徑向阻尼比0.05 后懸架軸荷/kg680靜摩擦系數0.94 前懸架剛度/(N/mm)31動摩擦系數0.74 后懸架剛度/(N/mm)30胎壓/kPa220

圖1 整車仿真模型
1.2 復合路面仿真模型
為反映車輛真實行駛狀態,讓研究車輛以不同車速通過不同路面,具體仿真試驗工況如表2所示。
首先,基于HyperMesh的二次開發,讀取和編輯B級隨機路面和脈沖路面的高程數據,分別創建隨機平直路面、隨機彎曲路面、脈沖路面幾何模型。接著,在PreSys中調整三個路面的位置,并將相鄰的重疊節點捏合,使三個路面共享邊界節點,完成復合路面仿真模型的建立。最后,通過ANSA軟件的網格檢查和修復功能,檢查路面單元法向,如有問題,需通過修復功能轉換單元法向。
表2 試驗工況
路面工況隨機平直路面隨機彎曲路面脈沖路面 路長/m503010 試驗車速/(km/h)604020
1.3 仿真試驗系統
經整車仿真模型的建立,相關連接和各部分接觸的定義以及計算條件的設定后,最終建立平順性仿真試驗系統,如圖2所示。

圖2 仿真試驗系統
參照《汽車平順性試驗方法》(GB/T 4970-2009)[10]進行仿真試驗,定義模型計算初始步長1.0e?6 s,終止時間8.6 s,計算機每執行5 000次循環后記錄一次數據。采用計算機輔助工程(Com- puter Aided Engineering, CAE)云計算方式,通過提交仿真模型K文件進行計算,獲取駕駛員座椅面、駕駛員座椅靠背和駕駛員腳部地板面三個測試點在時域和頻域下的仿真試驗數據,并計算平順性綜合評價指標,對研究車輛的平順性做出評價分析。
2 復合工況下平順性優化體系的建立
應用正交試驗設計理論,建立復合工況下平順性優化體系,主要步驟如下:
1.選擇平順性優化目標
依據平順性評價標準以及多層次模糊綜合評價體系[11-12]的內容,選擇車輛平順性綜合評價值作為優化目標:

式中,z為車輛平順性綜合評價值,是在平順性綜合評價模糊評價集基礎上,建立研究車輛在不同試驗工況和車內不同測試點位置的平順性能值關系矩陣,通過考慮不同測試點位置,完成一級模糊評價,再通過考慮不同試驗路況,完成二級模糊評價,獲得的平順性綜合評價值。
2.選擇平順性優化變量
對現有車型平順性進行優化時,由于相關元件的選擇和安裝已完成,車輛主要部件結構的修改受功能、成本、工藝等因素的限制。因此,本課題選擇對懸架彈簧剛度和減振器阻尼的非線性曲線值進行調整,以實現對研究車輛整車平順性能的優化提升,同時,也可為新車型的參數設計提供可靠的試驗數據和合理的分析結論。平順性優化變量:

式中,f、r分別為前后懸架彈簧剛度參數,N/mm;f、r分別為前后懸架減振器阻尼參數,N·s/mm。
3.確定平順性優化約束條件
為保證在車輛結構參數優化時不影響車輛其他性能,在進行優化時要對懸架進行基本的約束,具體內容如下:
1)懸架對稱約束
考慮到懸架設計時左右具有對稱性,在仿真試驗分析時,對車輛進行了簡化,設置懸架左右結構和參數相同,即



2)懸架剛度約束
要獲得車輛良好的平順性,就要盡量降低懸架剛度,而懸架剛度的降低會導致車身固有頻率的降低,這就要求懸架有較大的靜撓度。此外,為盡量減少車身縱向角振動,這就要求后懸架的靜撓度要比前懸架的靜撓度小一些。已知研究車輛懸架靜撓度的設計范圍為100~300 mm,則懸架剛度約束:

式中,f、r分別為前、后懸簧載質量,kg。
3)懸架阻尼約束
在車輛懸架減振器阻尼的設計中,振動衰減的快慢程度要用相對阻尼系數體現。已知研究車輛懸架減振器相對阻尼系數的取值范圍為0.25~0.35,則懸架阻尼約束為

4)懸架動撓度約束
受懸架結構的約束,懸架動行程[d]的取值范圍為70~90 mm。為了保證懸架動行程在行駛時撞擊限位塊的概率小于0.3%,則懸架動撓度均方根值約束為


式中,[d]為懸架動行程,mm;σdf、σdr分別為前、后懸架動撓度均方根值。
5)懸架偏頻約束
考慮前后懸架合理的共振頻率,懸架偏頻約束為


式中,f、r分別為前、后懸架偏頻。
4.確定平順性優化因素水平
依據所選擇的平順性優化變量,確定懸架彈簧剛度和減振器阻尼4個因素水平,每個因素以初始值±10%和±20%浮動,建立試驗設計分析的因素水平,如表3所示。
表3 平順性試驗設計分析因素水平表
水平因素前懸架彈簧剛度后懸架彈簧剛度前懸架減振器阻尼后懸架減振器阻尼 水平1-20%-20%-20%-20% 水平2-10%-10%-10%-10% 水平3+10%+10%+10%+10% 水平4+20%+20%+20%+20%
獲得懸架彈簧剛度和減振器阻尼的非線性曲線值變化情況,如圖3-圖6所示。
5.選擇適合平順性優化的正交表
選用四水平標準正交表16(45)[2],代表因素水平數4個,因素數5個,平順性優化試驗次數為16次,正交表的具體內容參照前文所述的因素水平變化情況。
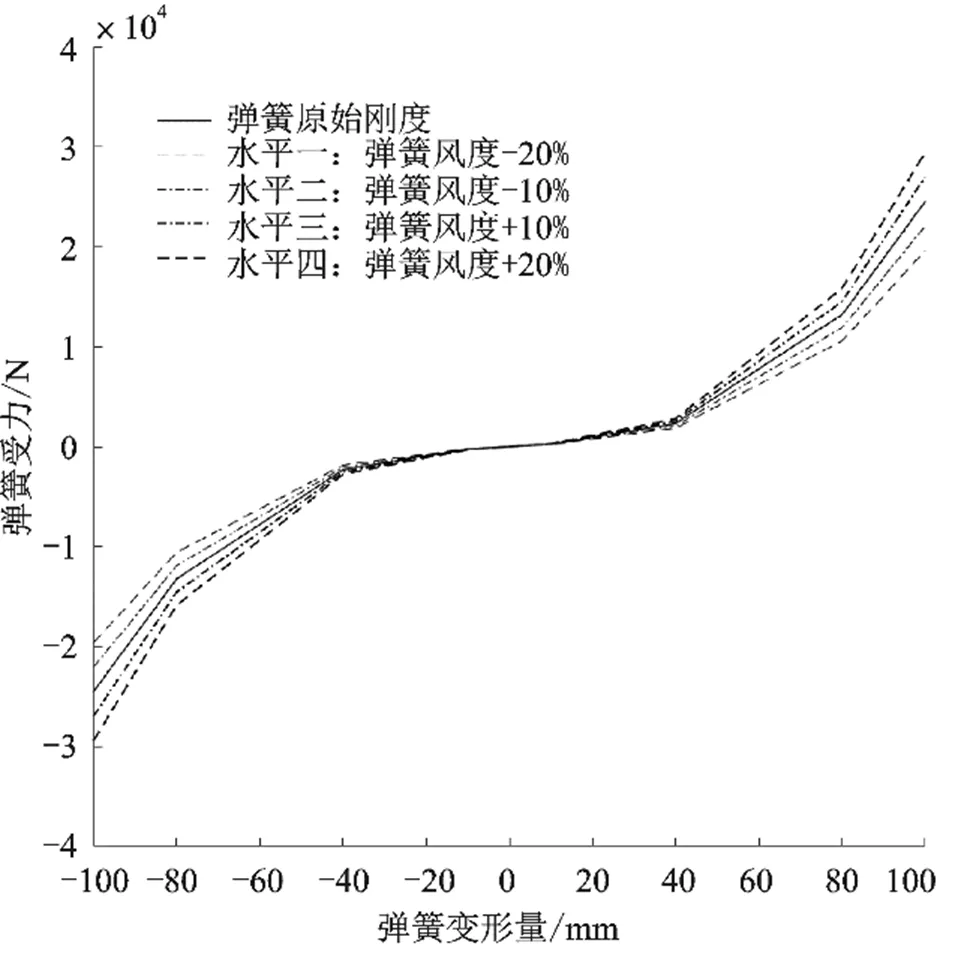
圖3 前懸架彈簧剛度水平變化情況

圖4 后懸架彈簧剛度水平變化情況

圖5 前懸架減振器阻尼水平變化情況
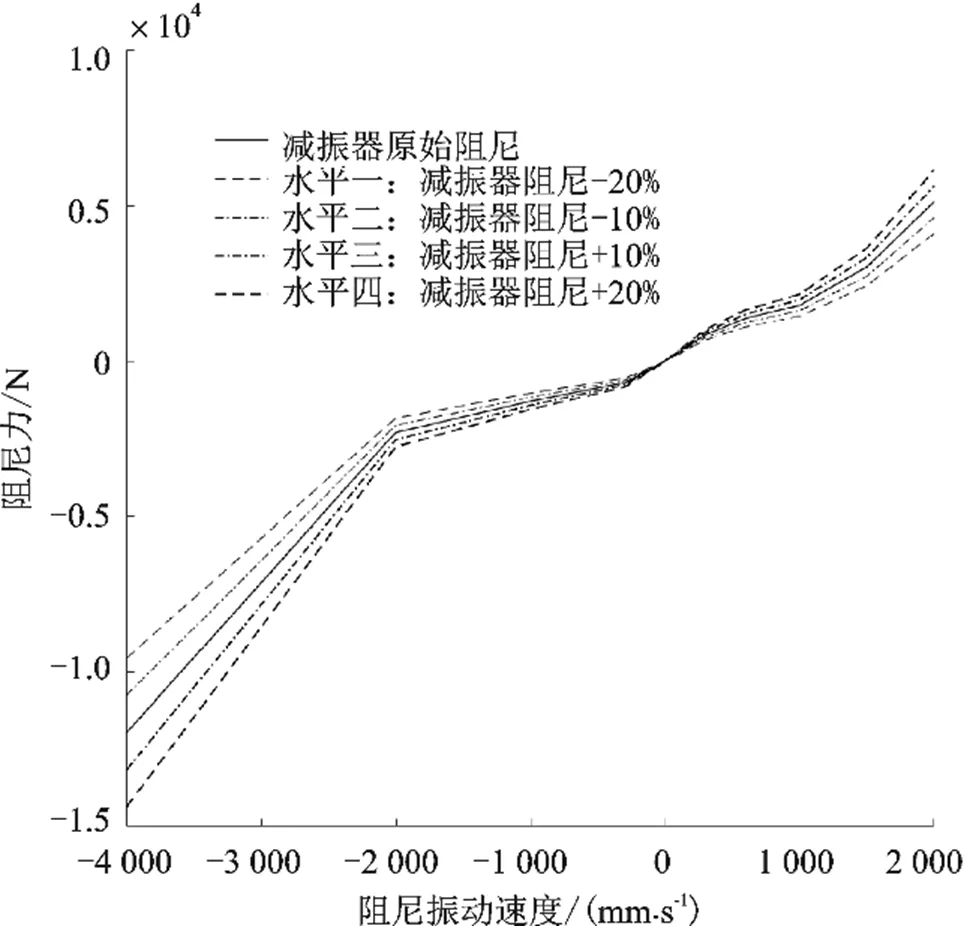
圖6 后懸架減振器阻尼水平變化情況
6.編制平順性優化仿真試驗方案及獲取試驗結果
按照正交表編制平順性優化仿真試驗方案,在平順性仿真試驗系統中完成試驗,并獲取試驗結果,如表4所示。
表4 平順性優化仿真試驗方案
試驗因素 前懸架彈簧剛度后懸架彈簧剛度前懸架減振器阻尼后懸架減振器阻尼空列平順性綜合評價值 試驗1111110.937 2 試驗2122220.937 6 試驗3133330.935 9 試驗4144440.931 9 試驗5212340.943 6 試驗6221430.935 7 試驗7234120.928 3 試驗8243210.923 5 試驗9313420.941 2 試驗10324310.936 5 試驗11331240.913 5 試驗12342130.908 5 試驗13414230.935 9 試驗14423140.925 6 試驗15432410.918 7 試驗16441320.910 9
7.分析平順性優化仿真試驗結果
首先,分析各因素對指標影響的主次。

式中,K為試驗方案中第列因素水平所對應的試驗指標之和;為因素數。

式中,R為第列因素的極差,反映的是第列因素水平波動時,試驗指標的變動幅度;R越大,說明該因素對平順性的影響越大。
接著,確定各因素應采取的水平。因素水平的選取與要求的指標有關,對于汽車平順性研究,要求平順性綜合評價值越大越好,代表駕乘人員舒適性越好,因此,本課題應選取值對應指標最大的水平。
最后,確定各因素應采取水平的最佳組合。充分考慮影響平順性的主次因素情況,按照有利于指標的要求選取水平,確定各因素的最佳組合方式。
經計算,得到平順性優化直觀分析表,如表5所示。
表5 平順性優化直觀分析表
指標因素 前懸架彈簧剛度后懸架彈簧剛度前懸架減振器阻尼后懸架減振器阻尼 K13.742 63.757 93.697 33.699 6 K23.731 13.735 43.708 43.710 5 K33.699 73.696 43.726 23.726 9 K43.691 13.674 83.732 63.727 5 k10.935 70.939 50.924 30.924 9 k20.932 80.933 90.927 10.927 6 k30.924 90.924 10.931 60.931 7 k40.922 80.918 70.933 20.931 9 R0.012 90.020 80.008 90.007 0 主次因素Kr>Kf>Cf>Cr 最優方案Kf1Kr1 Cf4Cr4 最優方案水平-20%-20%+20%+20%
表5中的數據表明,影響研究車輛平順性能的主要因素依次是后懸架彈簧剛度、前懸架彈簧剛度、前懸架減振器阻尼和后懸架減振器阻尼。研究車輛平順性優化的最佳組合方式是前懸架剛度曲線值-20%,后懸架剛度曲線值-20%,前懸架減振器阻尼曲線值+20%和后懸架減振器阻尼曲線值+20%。
3 復合工況下平順性優化體系仿真驗證
依據國標平順性評價方法[10],計算研究車輛各測試點的振動綜合加權加速度均方根值和振動計量值,并對比優化前后的數據[13],如表6所示。
表6 優化前后研究車輛各測試點數據對比
試驗工況測試點位置座椅面(m/s2)座椅靠背(m/s2)地板面(m/s2)XYZXYZXYZ 優化前隨機平直路面,車速60 km/h0.186 30.183 00.201 90.473 30.465 60.530 10.454 80.454 50.488 0 0.3300.4930.253 隨機彎曲路面,車速40 km/h0.278 90.272 80.304 40.621 10.600 20.634 80.728 80.765 40.824 7 0.4950.6340.423 脈沖路面,車速20 km/h1.150 01.149 41.570 53.193 53.194 54.233 63.100 33.098 04.113 7 2.2613.4561.977 優化后隨機平直路面,車速60 km/h0.169 90.166 80.187 90.437 00.429 30.497 10.419 20.418 90.457 5 0.3030.4560.236 隨機彎曲路面,車速40 km/h0.263 00.257 10.286 50.609 30.591 70.607 90.708 90.737 90.787 3 0.4660.6200.406 脈沖路面,車速20 km/h1.271 01.270 41.701 33.528 63.529 54.623 13.405 73.403 44.454 5 2.4753.8082.150
表6中的數據表明,優化后,車輛在隨機路面行駛時,研究車輛各測試點各軸向的加權加速度均方根值和總加權加速度均方根值都有不同程度的減小,而在經過脈沖路面時,卻出現了比較明顯的增大情況。這說明,復合工況下,車輛結構參數的優化對平順性優化呈現不同的影響效果,車輛在某一段路況下平順性的提升不能代表全路況下平順性能的優化情況,還可能制約、降低車輛在其他路況連續行駛時的平順性能。因此,為確保車輛平順性優化的合理性,需綜合考慮車輛實際的行駛工況。
再依據平順性綜合評價體系,計算得到研究車輛優化前后,各測試點的平順性綜合評價值,優化前后的數據對比,如圖7所示。

圖7 優化前后研究車輛各測試點的平順性綜合評價值對比
同時,對比車輛優化前后的平順性綜合情況,如表7所示。
表7 優化前后研究車輛平順性綜合情況對比
對比內容模型優化前模型優化后優化情況 綜合評價值0.933 90.952 9提升 2.03% 人的主觀感覺有一些不舒服有一些不舒服略有改善 評價等級二級(好)二級(好)保持不變
4 結論
本課題基于正交試驗設計理論,建立了復合試驗工況下平順性優化體系,并確定5個相關的約束條件和4個因素水平,選擇16(45)正交表,編制試驗方案。依據所需復合試驗工況,完成整車平順性仿真試驗,通過對比優化前后相同試驗條件下的數據,得出如下主要結論:
1)車輛懸架參數優化后,各測試點在隨機平直路面行駛的平順性綜合評價值平均提升了3.3%,在隨機彎曲路面行駛的平順性綜合評價值平均提升了2.5%,在脈沖路面行駛的平順性綜合評價值平均降低了3.1%,整體平順性綜合評價值提升了2.03%,雖然評價等級保持不變,但駕乘人員感覺略有改善。
2)本次研究車輛平順性優化的最佳組合方式對隨機振動輸入的減振效果較好,卻不能很好的應對突發較大的脈沖輸入。由于隨機路面在復合路況中占比最大,所以隨機路面下車輛平順性的提升對整車平順性綜合優化起到積極的作用,驗證了在復合試驗工況下進行車輛平順性優化,方法可行、結果可靠。
[1] 張文春.汽車理論[M].北京:機械工業出版社,2005.
[2] 任露泉.試驗設計及其優化[M].北京:科學出版社, 2009.
[3] ALDAIR A, ALSAEDEE E, ABDALLA T. Design of ABCF Control Scheme for Full Vehicle Nonlinear Active Suspension System with Passenger Seat[J]. Iranian Journal of Science and Technolog,Transac- tions of Electrical Engineering,2019,43(1):289-302.
[4] OUAIDAT G, CHEROUAT A, KOUTA R,et al. Sensi- tivity Analysis of the Uncertainties of the Mechanical Design Parameters: Stochastic Study Performed Via a Numerical Design of Experiment[J].International Journal of Hydrogen Energy,2021,27(46):14659-14673.
[5] MING W W,LONG C,XIU J Z,et al.Numerical Sim- ulation of Stamping Forming for an Automobile Rein- forced Plate Based on Orthogonal Test[J].Advanced Materials Research,2013,602(12):1988-1902.
[6] BIRHANU B,SHEWIT W,GOYTOM D.Multi Stage and Multi Response Process Optimization in Taguchi Method[J].Zede Journal,2015(33):88-93.
[7] 李晶,郭小汝,徐陽,等.基于Moldflow和Taguchi正交試驗的汽車空調外殼安裝板注射成形工藝參數優化[J].蘭州工業學院學報,2016,23(3):76-78.
[8] UYS P,ELS P,THORESSON M.Suspension Settings for Optimal Ride Comfort of Off-road Vehicles Travelling on Roads with Different Roughness and Speeds[J].Journal of Terramechanics,2007,44(2):163- 175.
[9] YONG J L,SHA H L,CUI Y W.Orthogonal Test Opti- mization of Vehicle Smoothness and Road Friendlin- ess[J].International Journal of Applied Mathematics & Statistics,2013,21(51):592-600.
[10] 中國國家標準化管理委員會.汽車平順性試驗方法: GB/T 4970-2009[S].北京:中國標準出版社,2009.
[11] 盧兆麟,李升波,周吉晨.結合自然語言處理與改進層次分析法的乘用車駕駛舒適性評價[J].清華大學學報(自然科學版),2016(2):137-143.
[12] 潘偉.車輛乘坐舒適性評價方法研究[D].鎮江:江蘇大學,2017.
[13] 高潔,張軍.多工況隨機輸入下的某SUV平順性試驗研究及其性能分析[J].機械設計與制造,2021(1):179- 184.
Establishment and Simulation Verification of Ride Comfort Optimization System under Composite Working Conditions
GAO Jie1, CHEN Ke2
( 1.Rail Transit Department, Dalian Technician College of Transportation ( Dalian Traffic and Port Vocational School ), Dalian 116013, China; 2.College of Automobile and Transportation, Shenyang Ligong University, Shenyang 110159, China )
Ride comfort optimization is an important aspect to improve vehicle performance. The ride comfort optimization system under composite working conditions is established based on the orthogonal experimental design in this paper. The comprehensive evaluation value of ride comfort, suspension parameters are selected as the optimization objectives and variables, the constraint conditions and factor levels are determined, and the test scheme is formulated. The simulation test research method is used to complete the ride comfort test under composite working conditions, and the primary and secondary relationship of different factors of suspension parameters on ride comfort are analyzed. The test results show that the composite working conditions can reflect the real driving state of the vehicle by considering the influence of road conditions and speed comprehensively. The optimal combination of suspension parameters can comprehensively improve vehicle ride comfort performance, the rationality and feasibility of the ride comfort optimization system are verified.
Ride comfort; Orthogonal experimental design; Comprehensive evaluation; Simulation test researchmethod; Composite working conditions
U462
A
1671-7988(2023)19-116-07
10.16638/j.cnki.1671-7988.2023.019.023
高潔(1984-),女,博士,高級講師,研究方向為汽車動力學仿真,E-mail:gaojie_1314@126.com。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45