載人月球探測一體化任務規劃設計方法研究
2023-10-21 01:31:08周晚萌周文艷鄧新宇李革非
宇航學報 2023年9期
關鍵詞:設計
周晚萌,周文艷,鄧新宇,李革非
(1. 中國航天員科研訓練中心,北京 100094;2. 北京空間飛行器總體設計部,北京 100094;3. 北京宇航系統工程研究所,北京 100076;4. 北京航天飛行控制中心,北京 100094)
0 引 言
20世紀90年代初,中國進行了探月計劃論證,分為“無人月球探測”“載人登月”和“建立月球基地”3個階段[1]。目前,嫦娥工程已經實現了無人探月“繞、落、回”,中國空間站也已進入空間科學與應用階段。下一步,載人登月將成為中國載人航天發展的現實選擇[2]。載人月球探測任務涉及載人和無人飛行器發射、地月與月地轉移、環月空間交會對接、月球著陸與上升和再入返回地球等多個飛行任務階段,各階段銜接緊密,關聯性強,設計復雜。載人月球探測頂層任務設計與仿真是帶動載人航天進入深空階段的有效抓手和關鍵一環,該飛行方案將直接影響到運載火箭、載人飛船、月面著陸器等多個型號任務的后續研制計劃。因此,有必要針對載人月球探測一體化任務規劃設計方法開展研究。
登月任務中涉及載人飛行器和無人飛行器的地月轉移任務,具體包括一般轉移軌道、自由返回軌道以及定點返回軌道。其中,一般轉移軌道和自由返回軌道需要與發射任務進行軌道匹配,自由返回軌道和定點返回軌道需要異面變軌以分別實現全月面到達和定軌返回。轉移軌道受地球引力、月球引力、太陽引力和其他攝動力的共同作用,描述地月引力空間系統的模型包括雙二體模型[3]、限制性三體模型[4]和高精度積分模型。雙二體拼接模型也稱為圓錐曲線拼接法,具有較好的半解析特性[5-8]。但該方法在月球影響球處實現軌道拼接,產生較大偏差。采用限制性三體模型設計自由返回軌道可以獲得更高的精度[9-10],但需要依靠數值積分求解,求解速度降低,不適合用于大搜索域的軌道設計。對于自由返回軌道的設計,Zhang等[11]和Bao等[12]利用偽狀態理論和改進算法設計自由返回軌道。在近幾年的自由返回軌道設計方法研究中,設計參數一般選擇為近地出發參數[13]、入射點[14]或影響球切換點[15]。He等[16]提出從近月點參數出發利用4段雙二體拼接法求解自由返回軌道,雖然該方法沒有判斷月球捕獲或求解偽蘭伯特問題產生的額外的數值迭代運算,但仍然存在拼接法固有的精度問題,導致高精度軌道設計過程的收斂速度降低。Zhou等[17]利用近月點偽參數和偽狀態理論設計自由返回軌道,很好地解決了拼接誤差問題。針對定點返回軌道設計,Williams等[18]和陸林等[19]基于脈沖異面變軌方法提出了具有全月面可達的三脈沖月地轉移策略。Ocampo等[20]考慮從以月球影響球處的地心段和月心段外推結果誤差迭代來設計返回軌道,并對比了單脈沖與三脈沖轉移的能量關系。Shen等[21]利用間接法計算月地返回的脈沖解,需要依靠數值求解方法,求解速度降低,不適合用于大搜索域的軌道設計。彭坤等[22]對利用地月空間站進行載人月球探測的不同任務模式進行了探索。賀波勇等[23-24]提出了利用甘特圖、月固系空間幾何、反垂點關系等手段實現基于環月軌道交會以及近地1次環月2次等交會模式的載人登月任務規劃。
上述方法采用了不同的軌道模型和設計參數,大部分都是針對單個階段的軌道進行獨立設計,近年來出現了一些窗口規劃和設計流程標準等頂層任務層面的研究。鑒于載人登月任務對于任務安全性的高度關注,單一的標稱流程設計很難滿足任務穩妥實施的要求。載人登月任務為一項復雜的大系統工程,為確保整個任務的順利實施,窗口規劃不僅要考慮某個單獨階段的軌道設計,還要考慮整個標稱任務和后續推遲任務的可行性。阿爾忒彌斯-1任務的幾度推遲也充分說明了將任務推遲納入任務頂層規劃考慮范疇的必要性。當前研究都是針對實現任務的標稱方案進行規劃,并未考慮到標稱任務當天推遲、當月推遲的后續影響。目前,科學載荷探測與基于1次環月軌道交會對接的載人登月方案,就落月點位置形成了耦合,特別是在著陸器已經入軌的情況下,飛船推遲發射后能否繼續保證后續任務的正常實施,仍然可以落到原計劃著陸點就顯得尤為重要。這使得軌道設計問題從原有的單次任務約束設計變為考慮推遲情況下不同任務之間的耦合設計,使得原有的軌道設計流程需要進行適應性的改進。另外,頂層設計過程中火箭停泊軌道滑行時間、月面著陸點、著陸場落區、測控條件部署等眾多設計指標,均需要窗口分析作為支撐,這就要求任務規劃設計方法具備更高的計算效率。因此,本文通過分析飛行任務方案,提出在考慮各種確定或待定的工程約束條件下實現標稱與推遲任務窗口的一體化快速任務規劃方法,隨后對任務規劃中的關鍵步驟展開分析,并給出不同時間尺度上的窗口設計結果和仿真驗證分析。
1 載人月球探測任務解耦
1.1 窗口定義
載人登月任務軌道窗口包括月窗口、日窗口和時窗口,分別用來確定1年內的可行月份集合,1個月內的可行日期集合,以及具體發射時段內的零窗口集合。例如,分析2025年到2035年間,不同登月點哪幾個月可以登月,其窗口分析尺度為月窗口;分析某個月份任務可行的日期,其尺度為日窗口。
考慮任務復雜情況下,需要飛船設計存在備份窗口,與1次轉移不同任務,分2次轉移發射任務情況下,可能會出現著陸器已經發射,但飛船無法正常發射的情況,飛船的推遲發射會影響后續能否落在原計劃著陸點,從而導致無人科學探索任務的失敗。為了便于區分,本文提出綜合窗口的概念。綜合窗口,是指在設計任務時窗口時,不僅考慮當天可以發射的零窗口集合,還要進一步考慮推遲1天、推遲到下1個月以及下1個月第2天的零窗口集合。因此,飛船的1個綜合窗口具備4個時窗口,分別為第1個月的當天窗口、第2天窗口、下1個月的當天窗口、下1個月第2天窗口。月面著陸器的窗口類似,在落月時刻軌道面的基礎上,考慮間隔發射需求、著陸器在軌能力以及著陸器推遲發射情況,需要往前推2到3個月計算月面著陸器的發射窗口和推遲發射窗口,同樣為4個窗口。載人飛船和月面著陸器可分別從各自的4個窗口中選擇1個發射窗口進行組合。
1.2 飛行方案分析
在繼承已有技術的基礎上,影響載人探月工程實現的關鍵技術主要包括載人飛船的自由返回、環月交會對接、近月軌道轉移以及定點返回。為突破上述關鍵技術,同時考慮任務之間的繼承性,需要逐步開展4類子任務:近地試驗、無人繞月飛行、無人登月與載人登月任務。其中,無人繞月飛行驗證了自由返回技術,無人登月在繼承了自由返回和環月交會對接技術的基礎上驗證了近月軌道轉移和定點返回技術。載人登月任務涉及的流程最為復雜,具體方案如圖1所示。
載人登月任務的飛行階段包括航天器發射入軌、一般地月軌道轉移、自由返回軌道轉移、軌道轉移捕獲、環月交會對接、動力下降著陸、上升交會對接、離軌轉移、定點返回轉移、再入返回。上述階段涵蓋了這一系列任務所需的全部飛行階段,通過各階段的排列與組合可以實現全部任務的編排。
近地試驗、無人繞月任務獨立于其他任務可單獨設計,而無人登月任務和載人登月任務均涉及到環月交會對接,且環月軌道設計與月面著陸和上升返回緊密相關。因此,需要優先考慮落月與返回時機,明確環月對接軌道,將其作為無人和載人登月的條件參數,從落月開始逐步反推飛船轉移方案和月面著陸器轉移方案,最后與運載火箭完成彈道拼接。
1.3 一體化設計流程
通過任務飛行方案分析可知載人登月任務涵蓋了前幾次任務的設計環節,因此可以主要考慮載人登月任務的設計流程。按照不同的時間尺度可以將任務規劃分為月窗口設計、日窗口設計和時窗口設計,具體的一體化設計思路如下。
第1步:光照和再入點緯度篩選。首先根據登月年份計算月面著陸點的光照條件,然后減去由發射到月面著陸的飛行時間,得到滿足月面著陸光照的可發射窗口;在光照約束基礎上進一步篩選出再入點緯度滿足著陸航程約束的月窗口。
第2步:升交點經度篩選。遍歷自由返回軌道的不同升降軌方式,計算第1步得到的每個窗口在該飛行方式下的軌道,通過改變自由返回軌道的返回軌道傾角和1次近月制動,來獲得改變環月軌道的升交點經度范圍以及各個窗口的升交點赤經范圍,并與環月軌道可行升交點經度范圍進行比對篩選,獲得可行的日窗口。
第3步:速度增量篩選。計算第2步得到的窗口的月地轉移加速速度增量以及再入點緯度,篩選出近月制動速度增量和月地轉移加速速度增量之和滿足飛船速度增量約束的日窗口。
第4步:推遲可行性篩選。根據第3步篩選結果,對每一個窗口的升交點赤經進行攝動分析,計算推遲至第2天、下個月第1個窗口、第2個窗口的升交點赤經,判斷推遲后的升交點赤經是否處于當天可行赤經的范圍,并計算對應的定點返回速度增量。
第5步:時窗口設計。根據第4步篩選結果,對每一個窗口進行發射傾角調整,確定當日的發射窗口寬度并與彈道設計相迭代,獲得當日發射任務的窗口寬度。
經過以上5步,搜索該登月年份中著陸到月面指定著陸點的綜合窗口,并在綜合窗口的基礎上按照設計標準開展詳細的任務軌道方案設計。針對任務具體方案復核任務過程中的光照條件、測控條件等其他工程約束。與傳統的軌道設計流程不同,一體化設計方法從幾何條件、攝動理論分析角度考察窗口可行性,利用轉移軌道升交點經度和升交點赤經范圍,與目標環月軌道初始升交點經度和推遲升交點赤經進行匹配,將軌道設計問題轉換為升交點匹配問題,降低軌道計算量,大大提高了窗口設計效率。該流程中所涉及的地月轉移設計、月地轉移軌道設計方法比較成熟,在此不再贅述。針對上述一體化任務規劃設計方法中光照、返回條件、軌道面等比較關鍵的幾個篩選步驟展開詳細論述。
2 任務規劃關鍵步驟分析
2.1 光照篩選分析
在第1步篩選過程中,首要考察因素就是太陽光照條件約束。陽光入射角的定義為光線與當地水平面的夾角,將太陽光近似為平行光束,則入射角可以表示為
(1)
式中:Rs為太陽相對月球的位置矢量;Rland為著月點相對月球的位置矢量。為保證月面著陸器正常工作,陽光入射角需要滿足一定的約束條件,這里取的約束范圍為35°~55°,超出該范圍則認為下降條件不滿足要求。以2028年全年為例,月面著陸點01-BD,全年的陽光入射角變化及可行的月面著陸條件如圖2所示。
圖2 2028年全年的光照條件分析Fig.2 Illumination condition analysis throughout the year of 2028
同時,考慮到月球表面上午與下午的溫度差異較大,一般取陽光入射角上升時間段作為可行的光照條件窗口。由此,通過光照分析排除了大部分窗口。
2.2 返回條件篩分析
在第1步篩選過程中除了考慮陽光入射角以外,還需要考慮能否正常返回地球。返回軌道的真空近地點,表示不考慮大氣層影響下返回軌道的近地點。不同返回傾角所對應的再入點可以形成一個再入圓,而返回的真空近地點往往處在地月連線的近地端,可以從空間關系中找到能夠返回著陸區的可行窗口。
以升軌返回北半球著陸場為例,定點返回軌道終端特征點的位置關系,如圖3所示。其中,地月連線反垂點為I,升交點為A,再入點為R,真空近地點(VCP)為V,著陸點為S。經證明真空近地點V在反垂點I附近,可以近似代替反垂點位置,直接與月球赤緯產生關聯。因此可以通過返回區域、返回速度傾角、返回軌道傾角以及返回航程角來判斷定點返回軌道窗口。
圖3 再入返回軌道示意圖Fig.3 Diagram of the reentry trajectory
(2)

(3)
式中:φS為著陸場赤緯。

(4)

(5)
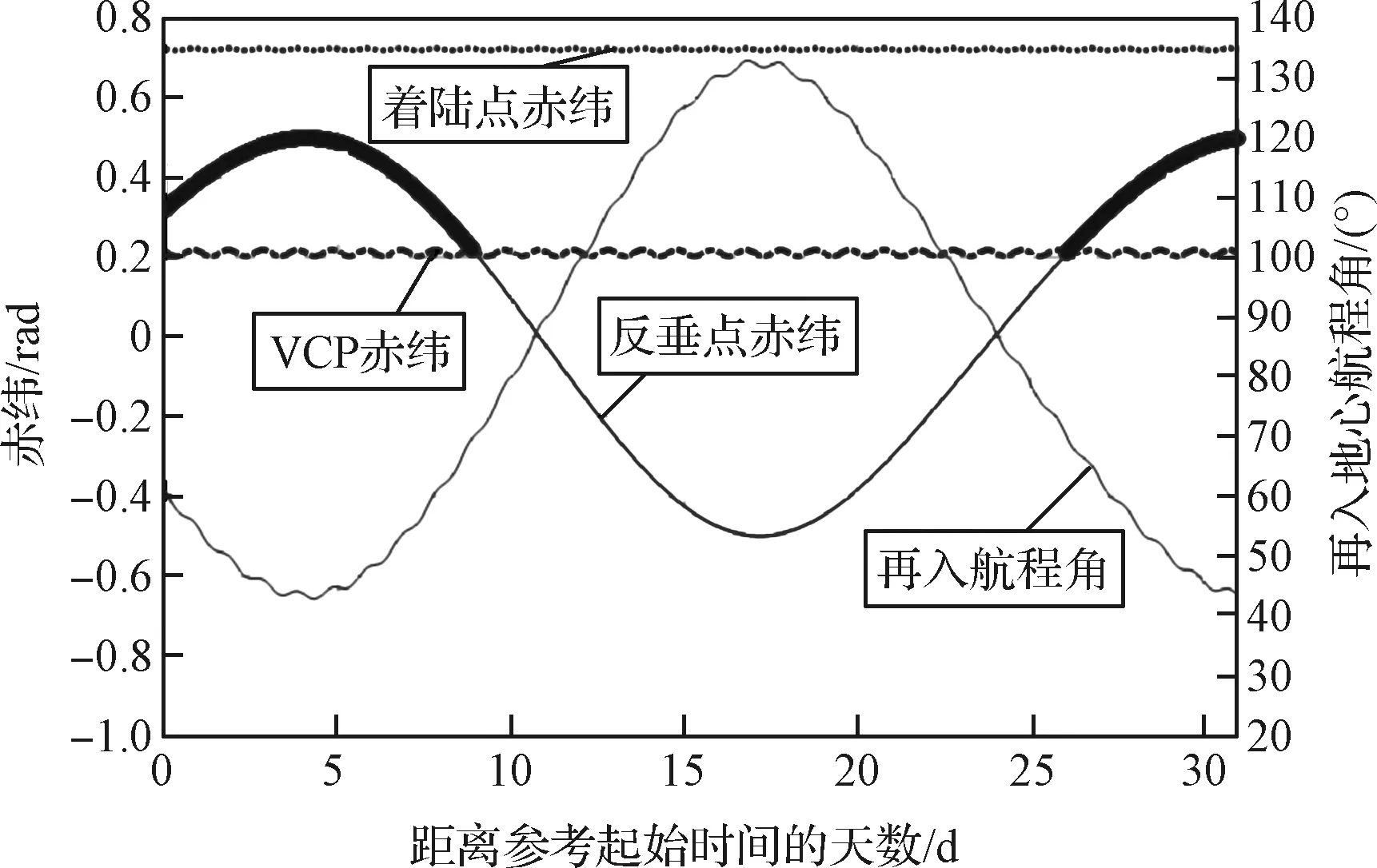
圖4 定點返回軌道的反垂點變化情況Fig.4 Inverse vertical point vary of fixed-point return orbit

2.3 環月軌道篩選分析
根據之前的設計流程分析可知,基于環月交會方式實現載人登月任務,著陸器一般轉移軌道和飛船自由轉移軌道均通過環月停泊軌道實現聯接,轉移軌道與環月停泊軌道的異面差大小,直接決定了任務窗口是否可行。一體化任務規劃設計方法的關鍵就在于將軌道設計問題轉換為環月軌道面約束問題,標稱窗口通過升交點經度可行范圍進行篩選,而推遲窗口則通過升交點赤經的外推實現篩選。本小節主要通過對環月軌道面可達域的理論分析和仿真驗證,來證實該設計思路的可行性。
2.3.1環月軌道傾角
環月軌道傾角由登月點緯度和月面工作時間共同確定,如圖5所示。根據月固系下軌道傾角和登月點緯度幾何關系,有
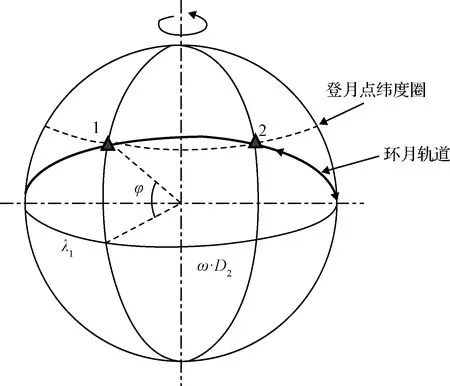
圖5 環月軌道傾角和著陸點緯度關系Fig.5 Relation between circumlunar inclination and latitude of the landing points
ωD2+2λ1=π
(6)
(7)
式中:ω為月球自轉角速度;D2為月面工作時間;φ為登月點緯度;i為軌道傾角;λ1為降交點到落月點赤道投影的月心夾角。
不同登月點緯度,3天月面活動的時間下,對應的月固系下環月軌道傾角與著陸點緯度(絕對值)之差,表征了落月期間的最大異面差,如圖6所示。
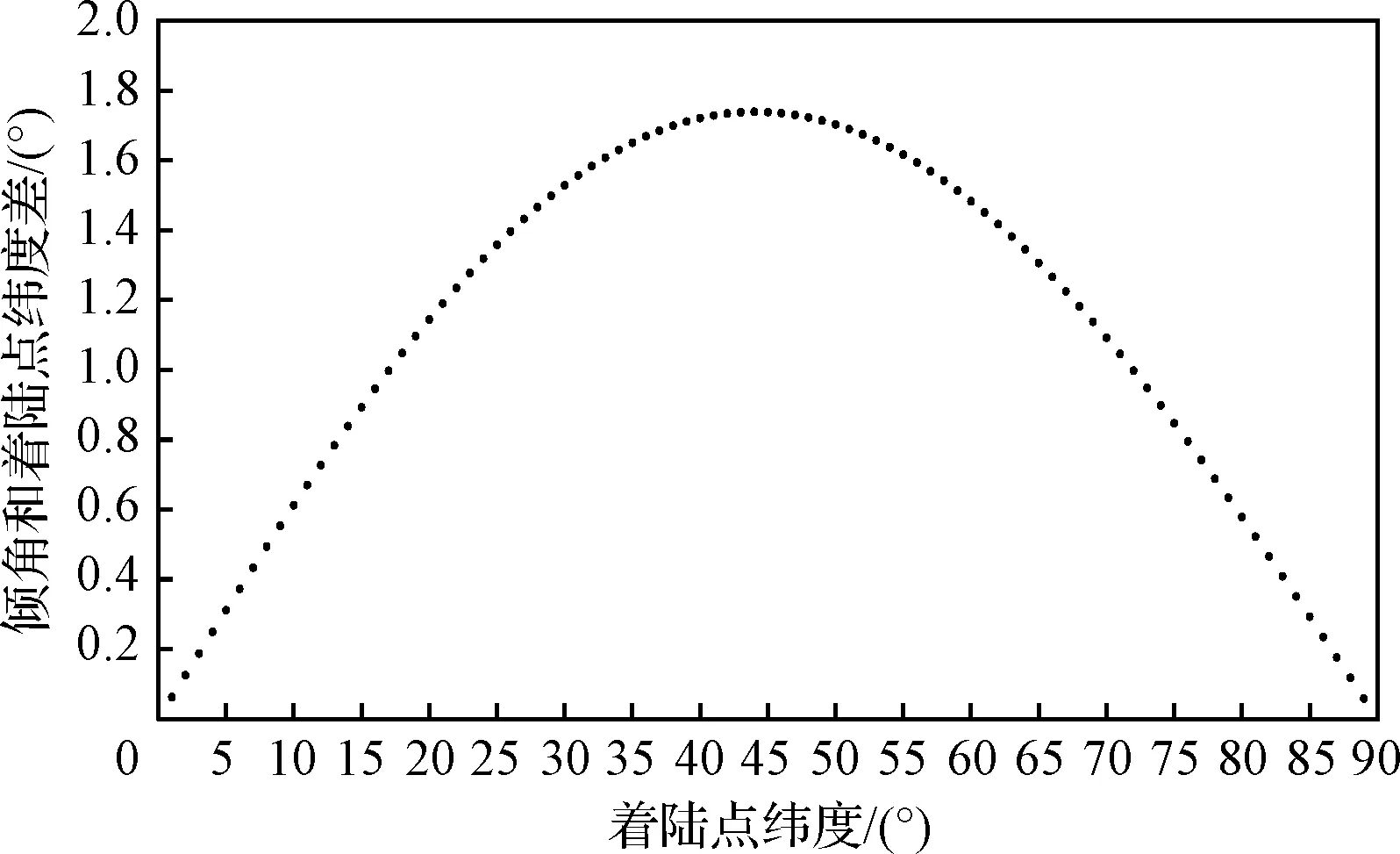
圖6 環月軌道傾角與登月點緯度差隨著陸點緯度的變化Fig.6 Variation of difference between inclination of circumlunar orbit and latitudes of different landing points
環月軌道傾角不小于登月點緯度,同時著陸點位于中緯度地區異面差最大,所需應急上升的軌道異面機動速度增量最大,對于低緯度和高緯度地區,異面差則較小。對于傾角大于90°的逆行軌道,(180°-i)與登月點的緯度差別滿足上述分析。
2.3.2環月軌道攝動分析
月面著陸器環月等待約2個月到1年,由于存在月球引力攝動,環月軌道的升交點赤經是變化的,軌道升交點赤經的長期攝動如下式,其中考慮了月球的J2項和J4項攝動:
(8)

根據科學目標,選定8個低緯度登月點,初始軌道為高度200 km的圓軌道,月面停留3天,選擇2027-1-1到2038-1-1的登月時間,可以根據上述條件獲得環月目標軌道六根數。采用月球高階引力攝動模型,統計每個登月點各登月時刻外推2到3個月的升交點赤經攝動變化情況,將環月軌道精確數值仿真計算與攝動解析表達式進行對比,見表1。從表中結果可知,環月軌道的升交點赤經變化近似為1(°)/d,又由于在短時間內傾角變化情況可忽略不計,可以據此來近似外推軌道面情況,以確定推遲發射任務的軌道面情況,注意這種近似僅限于大規模窗口分布規律分析。針對后續詳細軌道設計過程,仍然需要利用高精度模型進行軌道外推,以確保軌道設計的穩妥可靠。
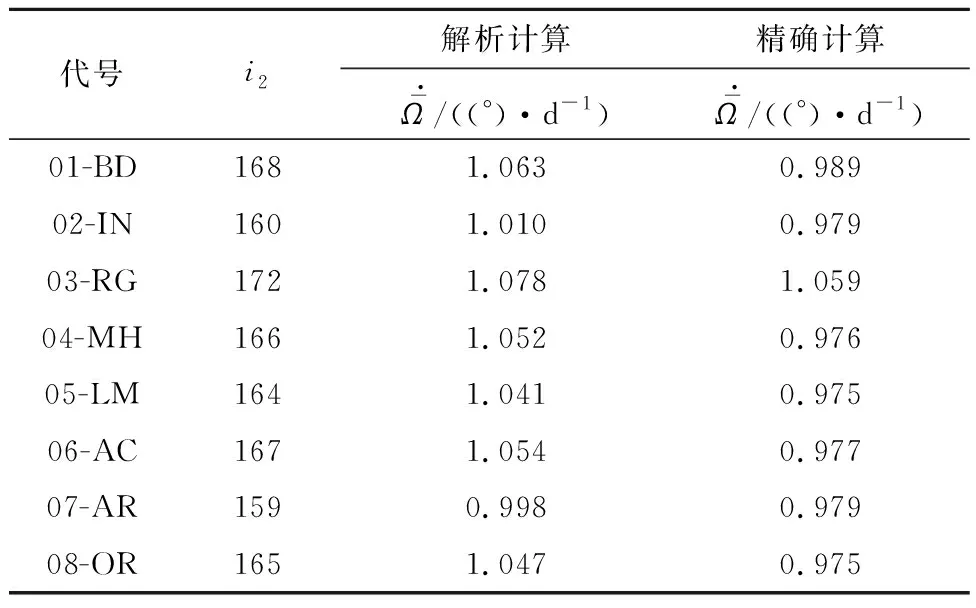
表1 不同登月點的環月軌道升交點赤經變化率Table 1 RAAN change rate of circumlunar orbit for different lunar land sites
2.3.3環月軌道升交點經度分析
環月飛行時間和著陸點經度決定了初始環月軌道的升交點經度,從月球北極向下的俯視圖如圖7所示。
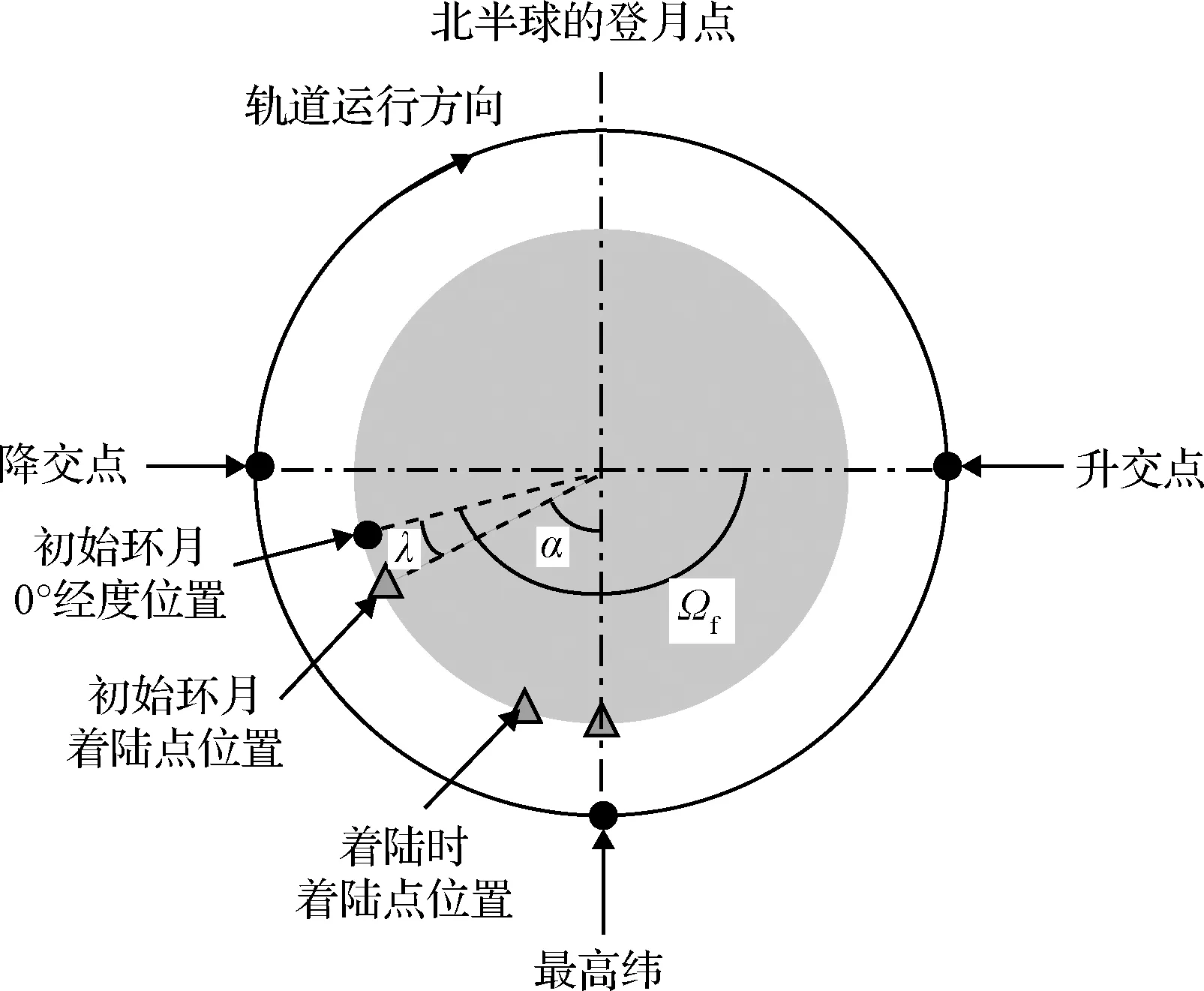
圖7 環月軌道的升交點經度Fig.7 LAN of circumlunar orbit
從飛船到達月球到著陸器著陸月球,即著陸前的環月飛行時間D1為2.5天~4.5天,月面工作時間D2為3天,飛船到達月球時刻,初始環月軌道的升交點經度Ωf可以計算如下:
Ωf=α+λ+90°-dΩ
(9)
根據環月飛行時間和月面工作時間有
(10)
式中:α為從飛船剛到達近月點到月面工作一半時間登月點轉過的角度;λ為登月點的月理經度;dΩ為從剛到達近月點到月面工作一半時間環月軌道的升交點赤經西移攝動量,可根據上一節的分析結果近似。首次載人月球探測任務著陸到月球較低緯度,且采用自由返回軌道,環月軌道的升交點赤經攝動量按照每天1°估算。對于北半球的登月點,降段著陸,升段上升,初始環月軌道的升交點經度Ωf可以按照上述方法計算;對于南半球的登月點,升段著陸,降段上升,初始環月軌道的降交點經度Ωf可以按照上述方法計算。
對指定登月點進行仿真計算,初始環月時刻從2027-1-1到2038-1-1,分別環月2.5天和4.5天著陸到指定登月點01-BD,對初始環月軌道的升交點經度需求如圖8所示。
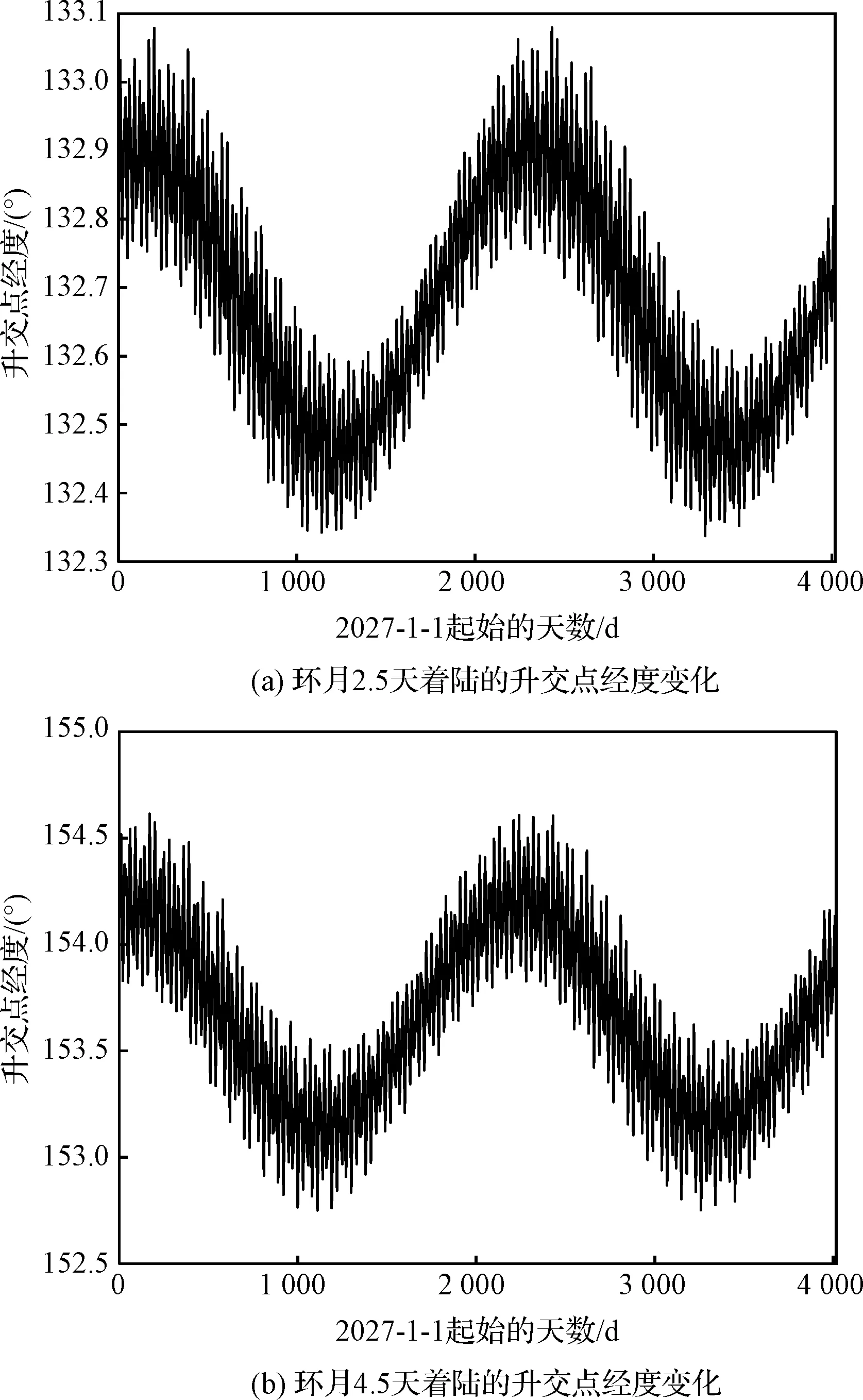
圖8 環月軌道初始升交點經度Fig.8 Initial LAN of circumlunar orbit
根據圖中結果可知,升交點經度變化呈周期性波動,變化范圍在1.5°以內。將環月等待時間2.5天和4.5天時間,落月3天所需的環月軌道升交點經度解析計算和數值計算結果,列寫見表2。
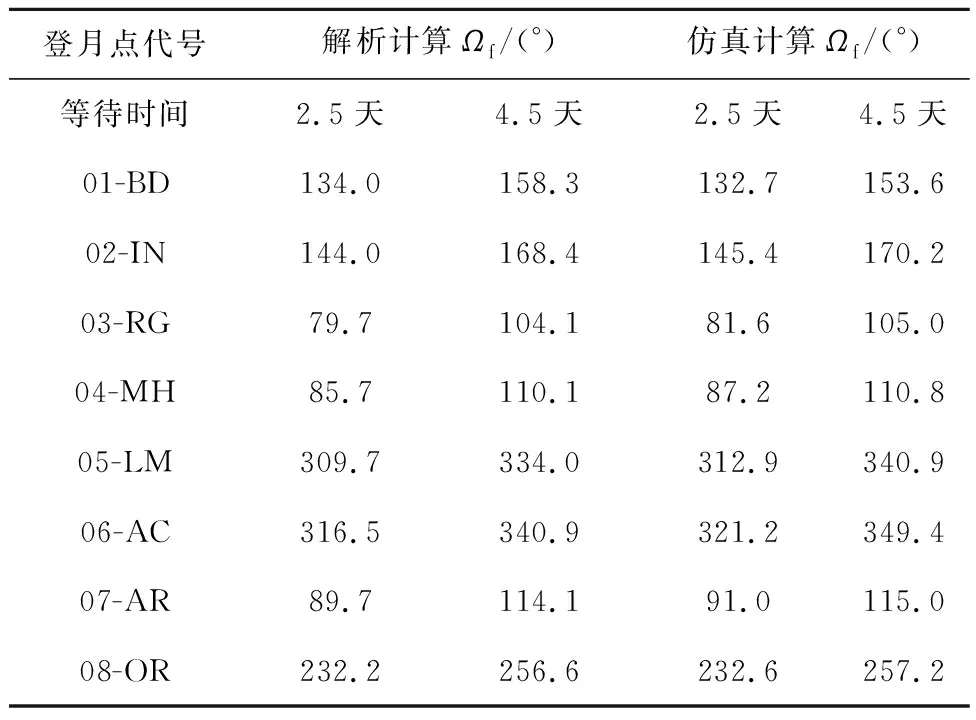
表2 環月軌道初始升交點經度可行邊界Table 2 Feasible range of initial LAN of circumlunar orbit
后續設計可以直接利用表2的結果,對飛行窗口進行篩選,若異面變軌后的升交點經度范圍處于可行范圍內,則說明窗口可行,否則需要更大的速度增量來改變軌道面,窗口不可行。
3 載人月球探測一體化任務規劃
本節結合一體化設計流程和約束分析結果,以2028年登陸代號01-BD的落月點為例,展開一體化任務規劃設計。與傳統的設計方法相比,一體化設計方法,由于減少了軌道設計計算量,整體設計耗時從原來的2個月左右直接縮短為10天左右。
3.1 任務月窗口設計

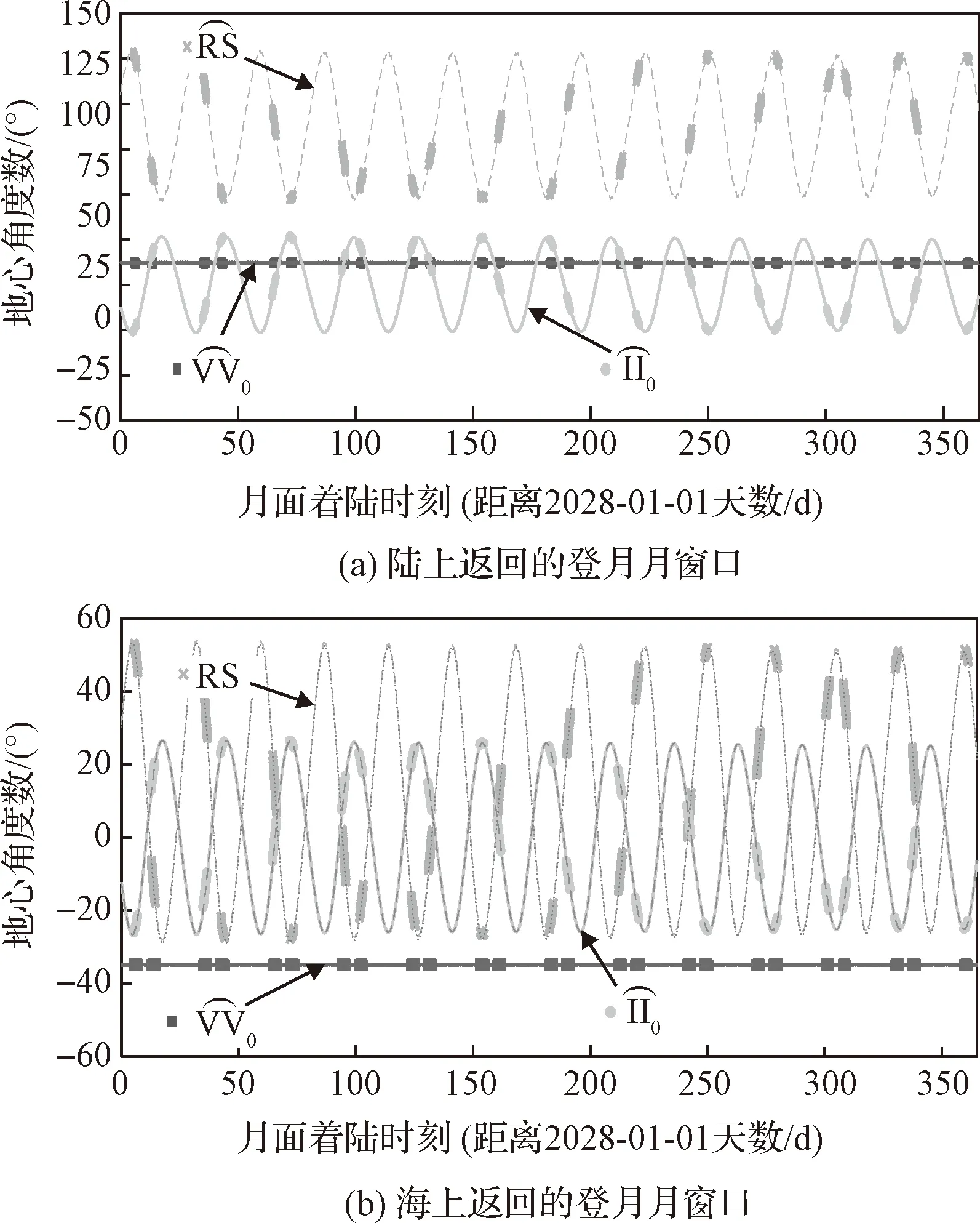
圖9 全年滿足光照和著陸場返回約束可行月窗口Fig.9 Feasible windows satisfing with sunlight and return site constraints throughout the year

因此,根據上述關于光照和返回著陸場的配置可以獲得,同時滿足光照和返回約束條件的月面著陸窗口,如表3所示。

表3 滿足光照和返回約束條件的月面著陸窗口列表Table 3 Feasible lunar landing windows that satisfy illumination and returning constraints
表3中每個序號首列的2行時間,表示滿足光照約束條件的著陸時間范圍,第2列的2行時間,表示滿足返回約束的著陸時間范圍,2個時間范圍的交集則表示同時滿足2個約束條件的著陸窗口。由表3可知,3、9、10號窗口存在航程角過小的返回軌道,通過進一步減小傾角,可適當增加航程角,但航程角增加幅度有限。
完成第1步月窗口規劃后,明確了環月軌道面參數以及可行的升交點經度范圍,進一步考慮一體化設計流程中的第2至第4步窗口設計問題。由于著陸器采用一般轉移軌道可以直接到達所需環月軌道面,而飛船采用自由返回軌道轉移,末端需要異面變軌,因此下面主要分析飛船的自由返回軌道以及定點返回軌道的日窗口設計。
3.2 日窗口規劃設計
日窗口分析為一體化設計流程的第2至第4步的組合,需要從升交點經度、速度增量以及推遲窗口3個方面開展分析。
3.2.1升交點經度范圍設計
根據之前的分析可知,明確近月到落月等待時間、月面活動時間以及月面著陸點,就可以得到環月軌道面升交點經度的可行范圍,且該范圍與具體窗口無關。遍歷不同升降軌類型和返回軌道傾角,計算自由返回軌道,利用1次近月制動,得到目標傾角下的軌道面調整情況,即目標環月軌道升交點經度可達范圍,進而判斷是否符合可行升交點經度范圍要求。在不滿足升交點經度約束的窗口,采用三脈沖近月制動的方式進一步擴大升交點經度的調節范圍(三脈沖方式具體指在近月點施加1次脈沖形成大橢圓軌道;在大橢圓軌道面與目標環月軌道面交線處進行異面變軌機動;在第2次到達近月點時進行第3次機動將軌道圓化)。月地加速返回分析與之類似,轉出過程相反。在升交點經度篩選的基礎上進一步考察近月制動和月地返回的速度增量,得到符合條件的轉移窗口。
3.2.2速度增量最優設計
由于考慮不同自由返回軌道傾角以及升降軌組合遍歷后的窗口數量過多,這里僅采用之前算例的參數,考慮定點返回軌道和自由返回軌道的速度增量,給出1年內飛船速度增量最小的窗口。
設置定點返回時刻距離月面著陸時刻4.5天以上,返回時近月點軌道高度為200 km,再入落區與具體月份相關,4月至8月為陸地著陸場,其他月份為海上著陸場。陸地著陸區的返回軌道傾角設置為43°,海上著陸區的返回軌道傾角設置為28°。每個日窗口中定點返回軌道的近月加速初值如表4所示。
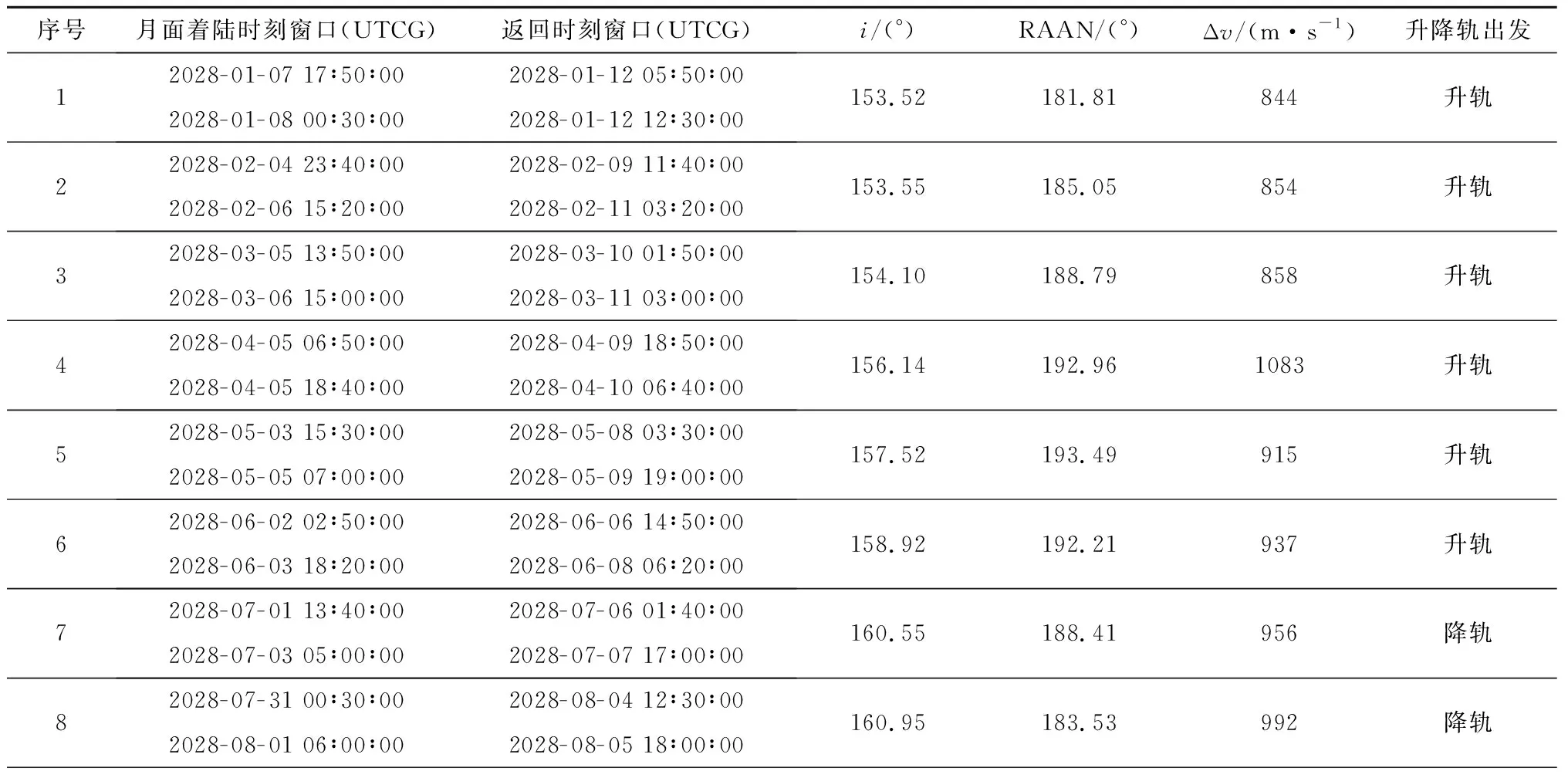
表4 日窗口中最小速度增量的定點返回軌道初值Table 4 Initial fixed-point-return trajectories with minimum velocity increment when fulfilling daily windows
設計自由返回軌道,計算到達目標環月軌道面所需的最小速度增量。近地出發軌道高度為170 km,出發軌道傾角為27°,交會對接前的軌道為320 km×500 km的橢圓軌道,自由返回海上著陸對應的返回傾角為28°,陸上著陸的返回軌道傾角為43°。由此,可以計算得到自由返回軌道以及近月制動的速度增量。由于地面著陸場經度范圍有限,自由返回軌道的上述窗口很難保證同時滿足入軌點經度要求和返回點經度要求,為此,這里考慮自由返回軌道返回海上的情況,如表5所示。

表5 日窗口中速度增量最小的海上自由返回軌道初值Table 5 Initial offshore free-return trajectories with minimum velocity increment when fulfilling daily windows
海上著陸場緯度較低,存在升軌和降軌返回情況,能量較省的軌道在編號5~8、12、13的窗口附近。由于近月到達時刻與月面著陸時刻保證2.5天以上,結合自由返回軌道近月點到達時刻可知編號5、8、12、13不符合轉移時間要求,編號6~7窗口可以根據海上落區和發射轉移時間進一步調整。
3.2.3推遲窗口分析
在上述篩選結果的基礎上,結合第2節環月軌道攝動分析,對每一個窗口的升交點赤經進行攝動計算,分別得到推遲至第2天、下個月第1個窗口、第2個窗口的升交點經度,同時計算到達環月軌道傾角下,近月制動速度增量可行范圍內的升交點經度變化范圍。根據環月軌道升交點經度的可行范圍,判斷推遲后的窗口是否仍然可行。若推遲后的升交點經度變化范圍不在可行范圍內,則說明當前窗口不具備推遲的能力;若在可行范圍內,同時返回速度增量也滿足要求,則說明當前窗口具備推遲的能力。具體推遲設計結果不再展示。
3.3 時窗口規劃設計
在明確發射日窗口后,還需要進一步考察每天發射窗口的寬度,通過調整不同的出發軌道傾角,可以得到不同出發時間下的地月轉移軌道以及相應的返回軌道,同時所對應的彈道飛行時間也不盡相同,具體的發射時間還要根據火箭發射段的彈道進行精細化迭代拼接,完成拼接后再開展各環節的詳細軌道設計。以本文設計條件為例,給出一組優化后的任務軌道結果以及月心J2000系(MJ2000)下的速度增量結果,如表6~7所示。
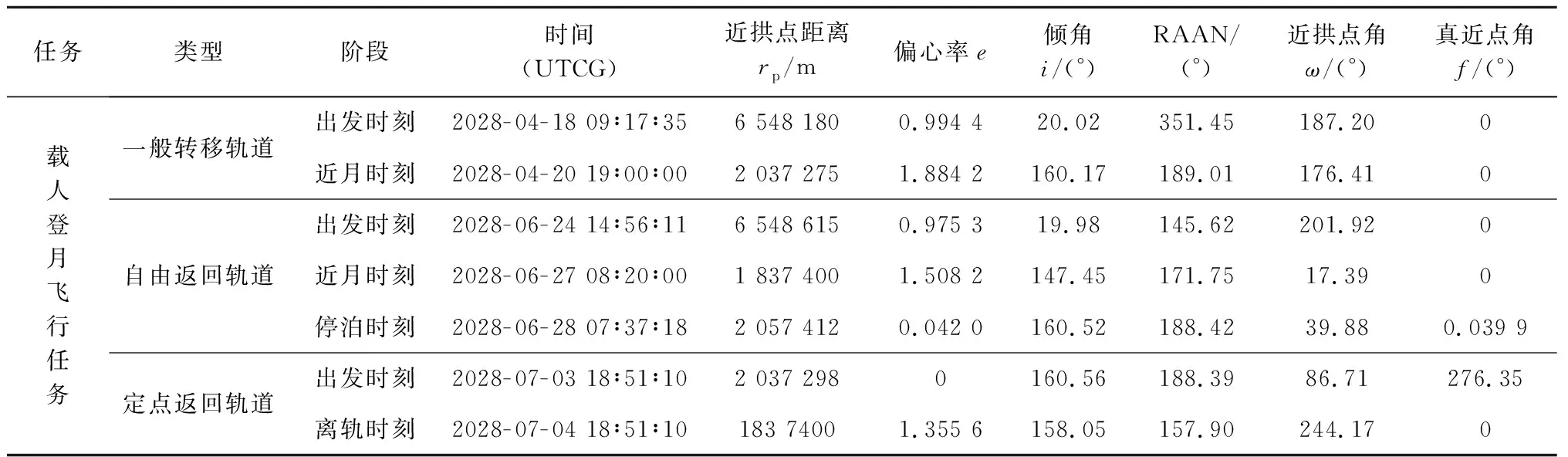
表6 載人登月任務設計結果Table 6 Design results of manned lunar landing missions
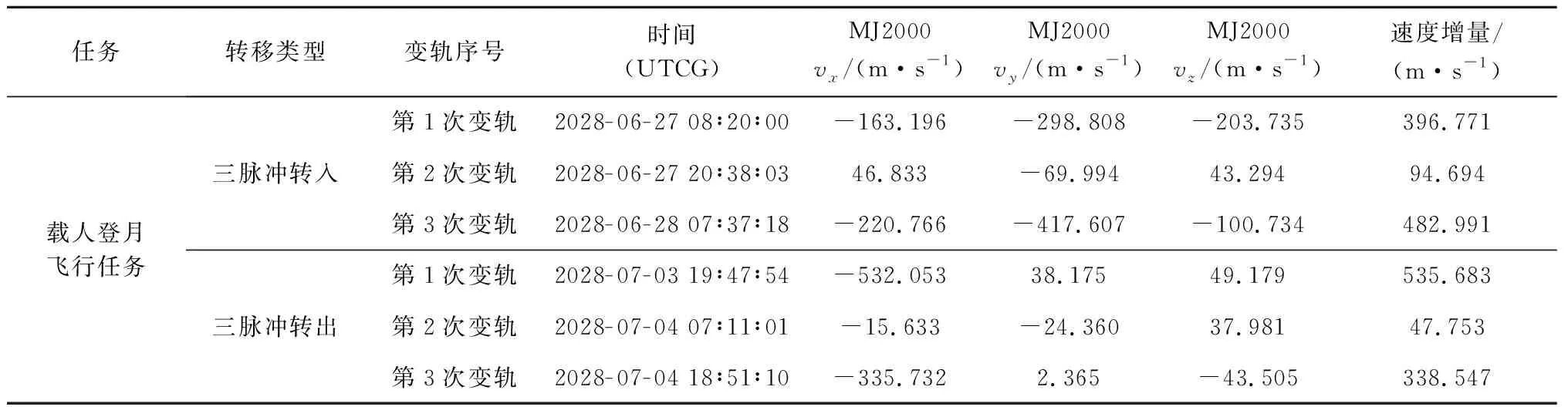
表7 載人登月任務三脈沖轉入轉出設計結果Table 7 Design results of three-pulse transfer in a manned lunar landing mission
4 載人月球探測聯合仿真驗證
針對載人月球探測任務,載人航天總體研究論證中心與國防科技大學合作搭建了一套全生命周期的聯合仿真平臺,通過平臺仿真結果分析來驗證軌道方案設計正確性。
4.1 聯合仿真平臺
載人月球探測仿真平臺SIM,實現了一個平臺貫穿整個仿真系統周期,同時也在仿真建模、系統運行、分析評估及態勢展現的各個階段,提供集成開發、運行管理和資源服務等全方位仿真支持,其組成和整個系統如圖10、圖11所示[25]。
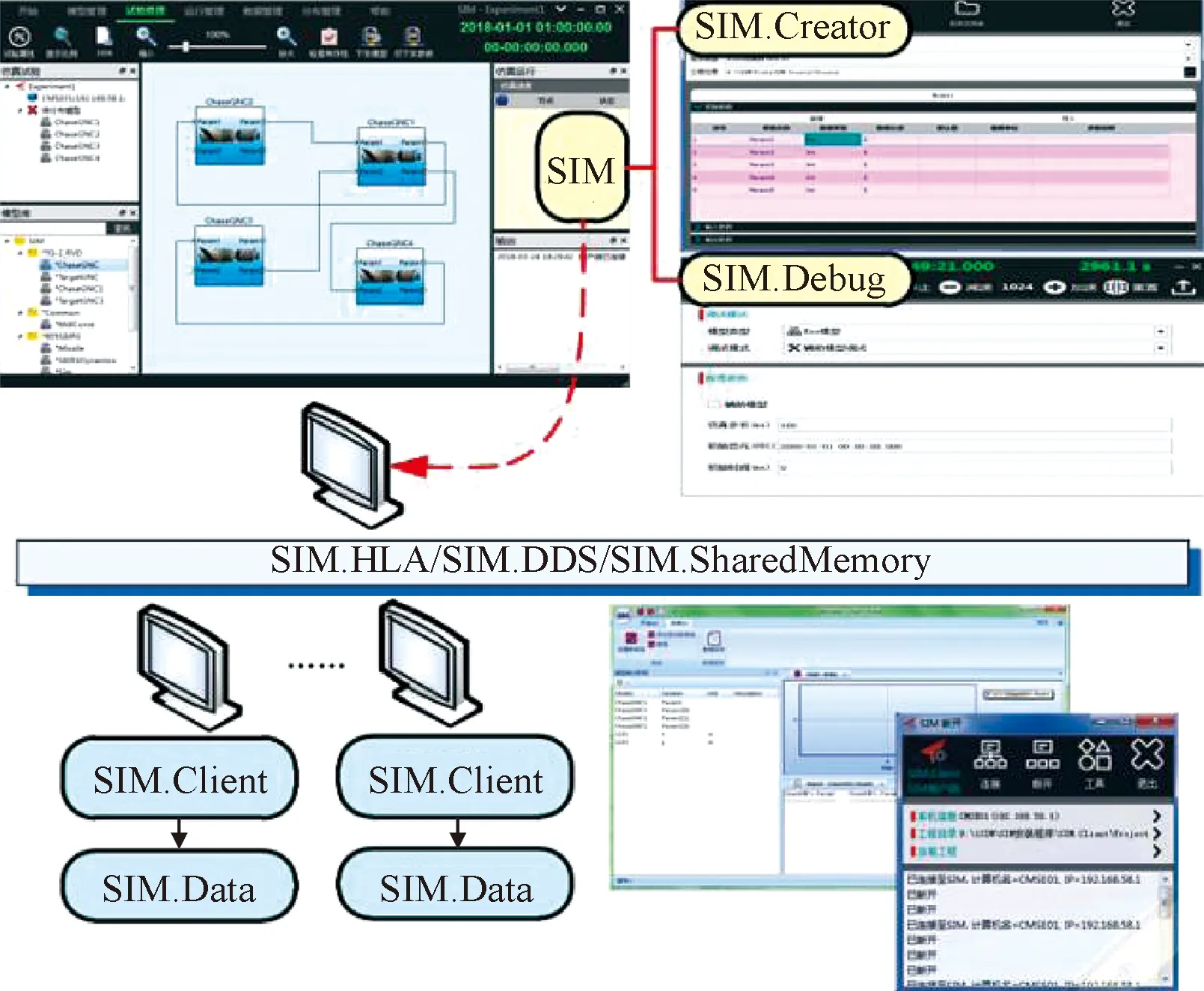
圖10 載人月球探測仿真系統架構圖Fig.10 Simulation system architecture for manned lunar exploration
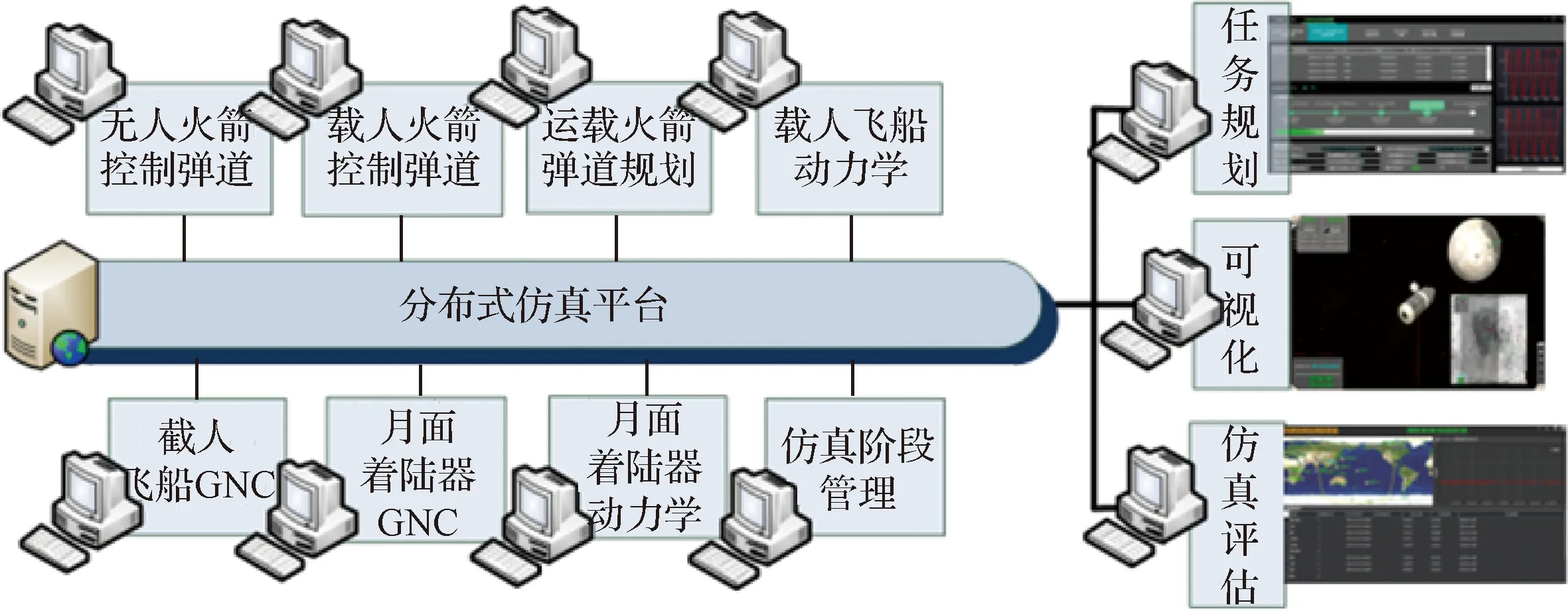
圖11 載人月球探測仿真系統部署Fig.11 Simulation system deployment for manned lunar exploration
4.2 仿真驗證
利用仿真平臺可以對載人登月任務進行聯合仿真。將各飛行階段的飛行器動力學模型與GNC模塊,利用SIM.Creator生成統一標準模型、由SIM.Debug進行模型調試,并在SIM進行仿真系統的搭建與組裝,通過節點注冊與模型分發開展分布式仿真,最終實現飛行仿真。載人月球探測飛行任務的仿真結果如圖12所示[25]。
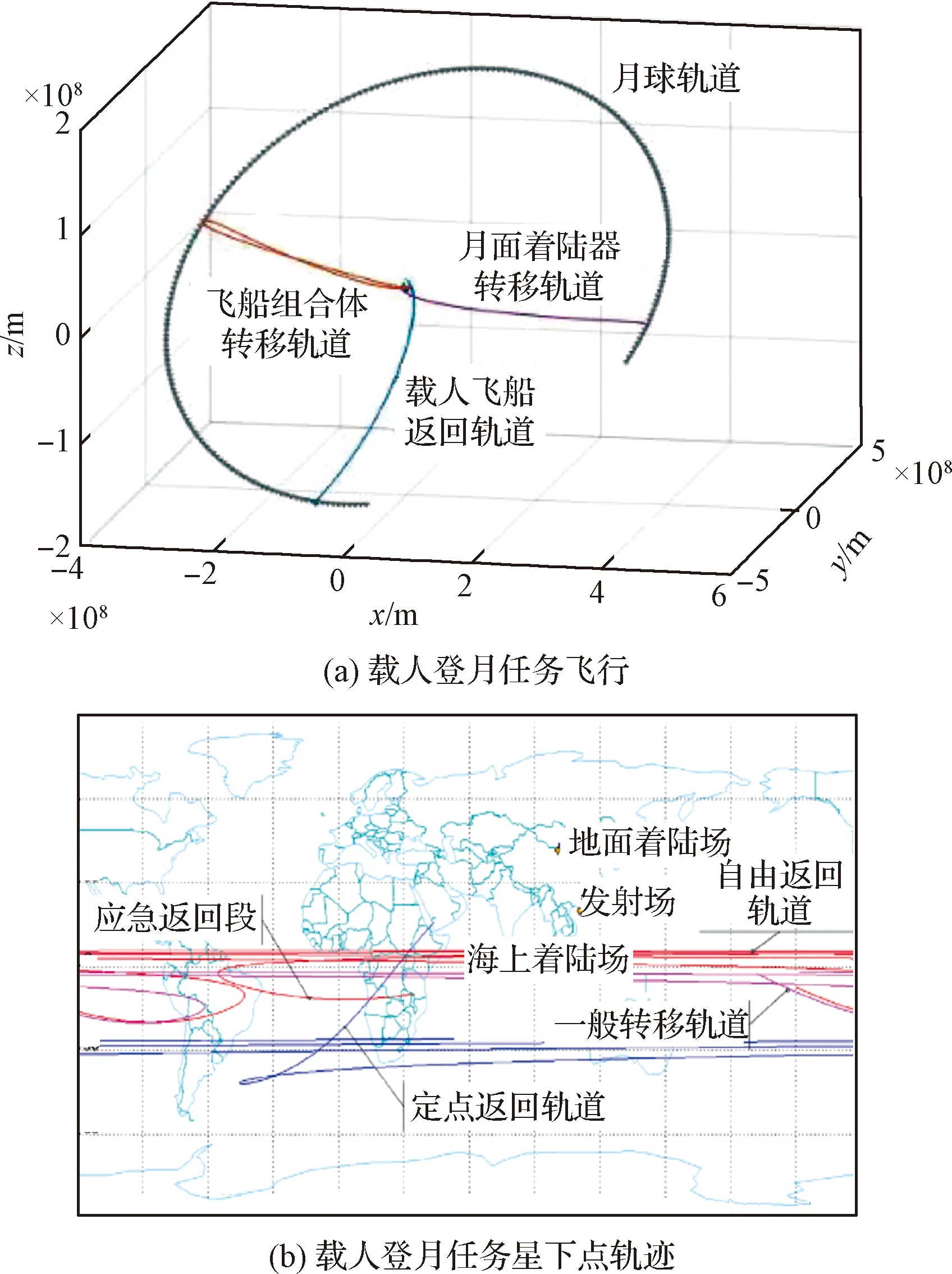
圖12 載人登月仿真結果Fig.12 Simulation results of manned lunar landing
從仿真結果中可以看出,載人飛船在應急情況下,可以利用自由返回軌道直接返回印度洋海域。在正常執行完月球探測任務后,利用定點返回軌道,返回陸地著陸場。入軌點和再入點均與實際情況相匹配。
5 結 論
本文從頂層任務規劃分析入手,將載人月球探測任務進行階段拆解,解耦設計流程,并對規劃所涉及的關鍵約束進行分析。基于環月軌道設計,本文提出了一種全新的任務一體化規劃設計方法,可以很好地解決跨時間尺度、多飛行階段的載人月球探測任務規劃問題,并通過聯合仿真驗證了該方法的正確性。該一體化方法不僅實現了標稱窗口設計,同時還可以給出推遲情況下的綜合任務窗口,可以作為未來載人月球探測任務的規劃分析手段,具有較高的工程應用價值。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04