
復雜機電液設備電氣系統故障診斷實驗研究
2023-10-23 04:01:38韓影高傳磊
環境技術 2023年8期
韓影,高傳磊
(1.咸陽職業技術學院 機電學院,西安 712000;2.彩虹集團特種玻璃有限公司,邵陽 422000)
引言
隨著城市化的高速發展,緩解交通擁擠壓力進行了大量的城市化交通建設,盾構機是不可或缺的地鐵掘進隧道的大型機械設備[1]。盾構機是一種機械、液壓以及電氣集成化的大型重載專業化設備,其長期工作在復雜多樣的施工環境,功能的穩定性和維護性面臨巨大的挑戰,尤其是復雜的電液系統,故障頻繁和故障原因復雜,極易導致電液控制系統的失效,從而影響盾構機工作的穩定性,面對這一重型復雜的機電液設備,需要有完善的故障診斷機制和策略,才能快速的識別出潛在的故障狀態,通過故障響應分級的進行盾構機系統保護[2]。
復雜機電液設備的故障診斷難點在于其系統結構復雜、部件間的耦合性強,故障觸發后故障響應較為復雜,因此復雜機電液設備故障診斷一直是研究的重點和熱點,在長期的持續研究中,取得了重大的研究成果,其中,華北水利水電大學的郝用興[3]為了在線監控盾構機的工作狀態和故障狀態,提出使用加權因子與傳統費歇爾判別法相結合的加權費歇爾判別法,運用仿真故障數據得到每一類故障的加權向量,建立VWFDA模型對盾構機進行故障診斷;華南理工大學的史步海[4]以盾構機為研究對象,針對盾構機故障診斷過程中各類故障數據集存在類別不平衡的問題,采用基于SMOTE算法和Bagging算法的故障診斷分類器對盾構機數據進行故障診斷;上海大學的樊彬彬[5]針對盾構機的故障診斷,構建了基于故障樹模型的綜合推理機,結合實時參數和動態規則的實時診斷推理機能夠快速的識別盾構機的系統故障,提高盾構機的故障診斷能力。本文針對復雜機電液設備的盾構機電液系統進行精準故障診斷,通過設計相關組件故障診斷事件處理拓撲結構,采用故障特征值離群診斷方法裁剪電氣組件故障診斷處理過程,并通過集成化測試環境驗證故障診斷方法的可行性和穩定性。
1 盾構機電液系統結構
高復雜度的盾構機是多部件組成的一種機電液特征強耦合的綜合大型設備,主要由刀盤/刀盤驅動控制系統、盾構機架、輸送機、推進液壓油缸、電液驅動系統、復合制動系統以及電氣/推進系統附件裝置,如圖1所示[6]。
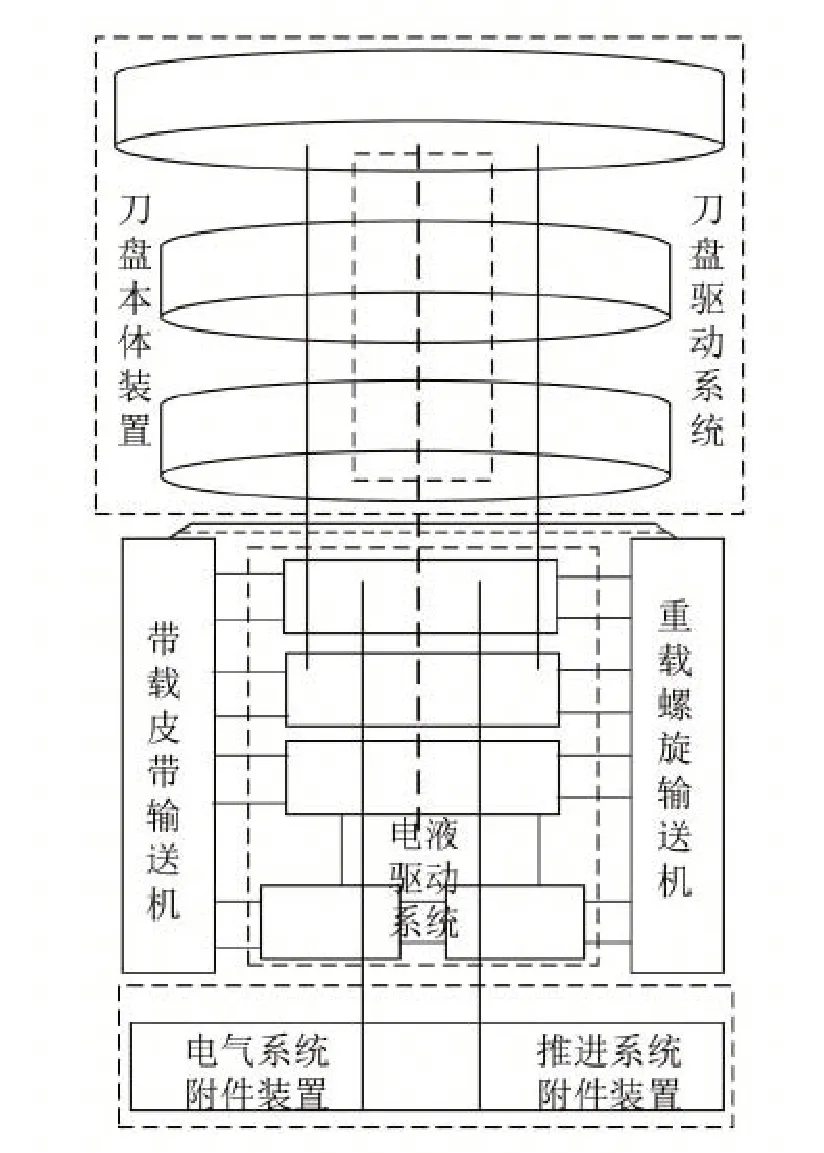
圖1 復雜盾構機系統結構
2 故障事件拓撲結構
復雜機電液設備在周期性監測故障發生的狀態,在部件發生故障后,針對不同的故障確認狀態進行等級劃定,尤其是嚴重度高的故障,一旦確認故障已發生,需要快速的進行故障響應[7]。因此需要根據復雜機電液設備的部件結構和電氣部件的特性,設計可以承載高負荷高算力下的盾構機故障監測和故障響應,整體的故障事件處理包含了故障監測使能條件、故障確認、故障恢復、故障特征集群、故障響應分級等,在故障監測的過程中,實時的對故障診斷使能條件進行判斷,只有在故障診斷使能條件滿足的狀態下才能進行相應故障診斷項的監測。
針對不同的部件故障診斷,分為靜態故障診斷、動態故障診斷,其中,故障診斷使能條件在部件上電或者工作時就自動的靜態滿足,待故障監測條件達到后確認故障;故障使能條件在一定的條件或耦合相關部件后滿足,瞬態故障經過故障診斷濾波后確認成為動態故障;當故障確認后經過故障特征集群化優化后,會將低效率低故障精度以及強耦合故障特征進行裁剪,隨后故障事件處理模塊劃分相應的故障等級,通過故障等級進行故障響應機制的執行,如圖2所示。
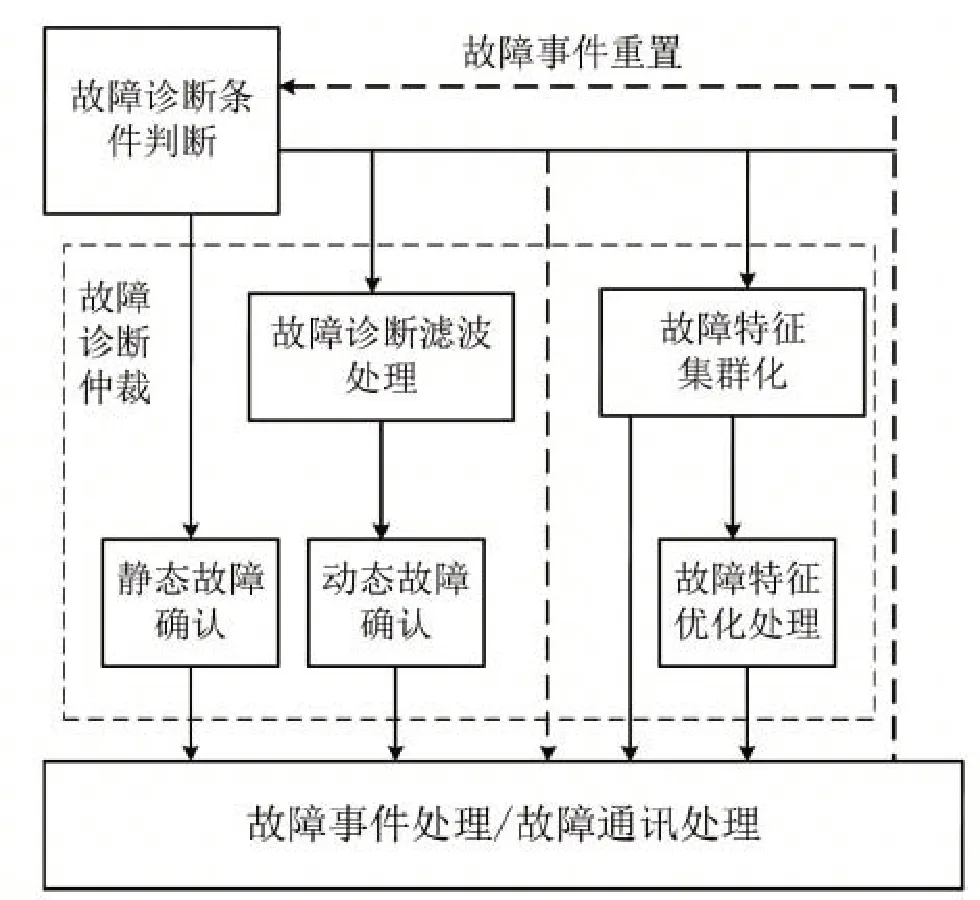
圖2 盾構機故障事件處理拓撲結構
盾構機多部件的故障診斷需要利用故障特征離群進行解耦,在故障診斷過程中,需要對盾構機的電液信號進行優化處理,通過閾值[Sp0,Sp1]判斷電液信號的診斷有效性,反饋相關電液信號的瞬時有效性標志、概要有效性標志、有效性標志[St2,Sp3,Sp4],用于部件的故障診斷使能條件,返回值[Ze0,Ze1]用于表征電液信號處理的狀態;在故障特征離群優化處理階段,將電液系統故障特征[Dk0,Dk1,Dk2]以及[Ds0,Ds1,Ds2]按照定好的離群策略進行離群處理即可;故障診斷階段進行故障的確認和恢復[Ft1,Ft2],隨后進行部件的故障仲裁和故障事件處理,如圖3所示。
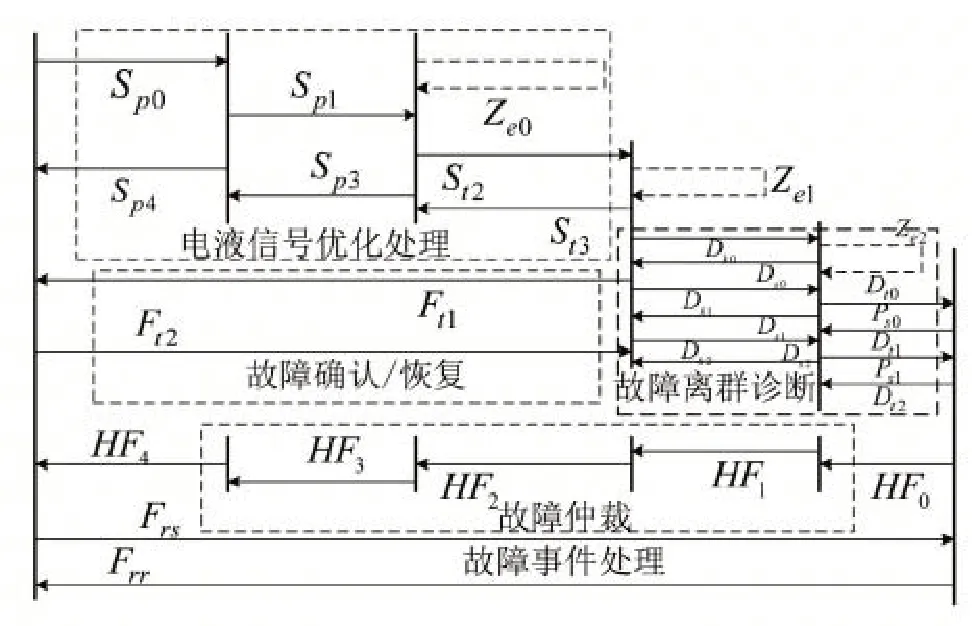
圖3 盾構機故障診斷時序
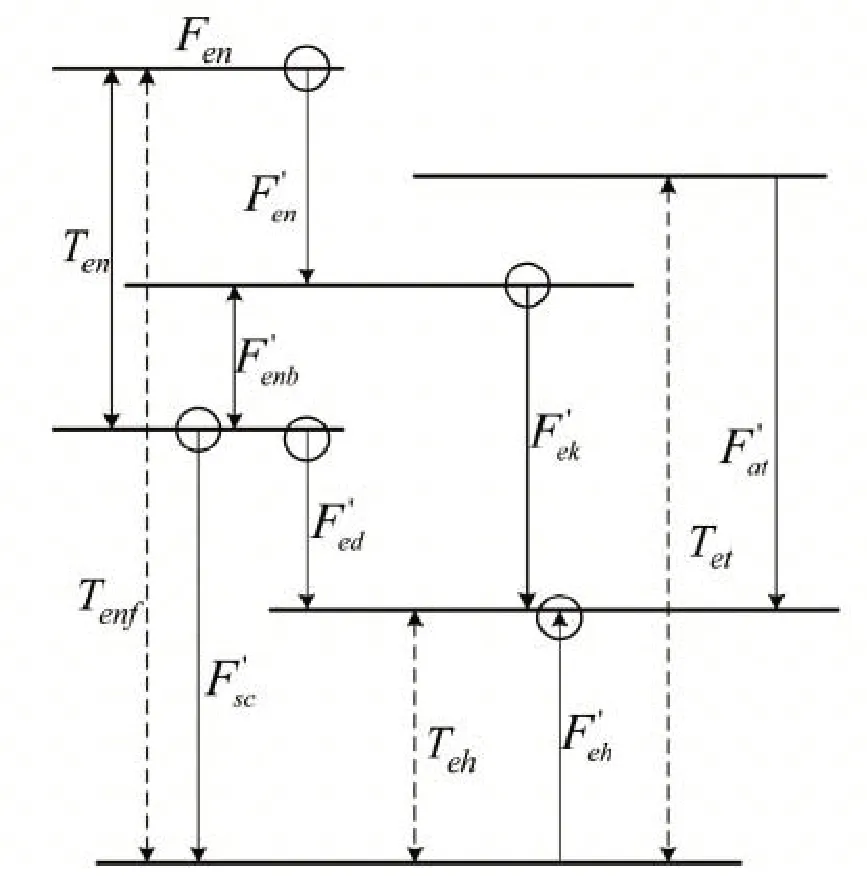
圖4 盾構機故障確認防抖處理
3 故障診斷方法
盾構機多部件的故障診斷是在一個多變多耦合的故障監測過程,電液部件故障監測的瞬時故障結果是突變的,不能立刻作為故障結果,需要對瞬態的故障結果進行濾波防抖處理,將最后的故障結果作為確認故障,進行故障特征離群處理后執行故障響應。本文設計的故障濾波處理方法是基于時間的持續型故障防抖處理方法[8]。
基于時間的持續型故障防抖處理關注的是故障使能Fen、故障重置、瞬態故障、確認故障以及故障防抖處理的時間Ten,Tenf,Teh,Tet,在設計其故障確認和故障恢復過程的防抖時,故障診斷使能優先級最高。故障使能條件滿足=1的狀態下,電液系統故障監測瞬時狀態為故障狀態后,在故障確認時間內一直持續為故障狀態且無故障重置命令,經過持續的防抖計數,計數達到故障確認計數值后故障可確認;若在故障確認過程中,故障診斷使能條件不滿足=0,防抖計數需要停止計數,故障狀態保持,直到故障使能條件重新滿足后,計數開始重新計數;在故障重置和故障使能條件滿足的狀態下,只要故障重置置位后=1,故障可以直接清除=0,其防抖處理具體實現描述如下圖所示。
盾構機故障診斷的特征值是一個融合了大量復雜信息的故障信息集[9],利用故障特征離群處理方法,將確認故障突變、故障信息準確度下降率大、部件診斷效率下降的故障監測參數進行分集處理,制定多向的故障離群判定準則后,將故障特征模糊的故障確認狀態進行剝離,如圖5所示,制定故障特征離群區域FA和FB,其中,FA故障特征離群區在[Fet1,Fet2,Fet3]故障監測周期內評估的確認故障質效[Qt1,Qt2,Qt3,Qt4]判定結果較為低,同理FB故障特征離群區的故障診斷質效非常高,但是其故障診斷的效率較為低下且故障監測響應過慢,具體的如圖5所示。
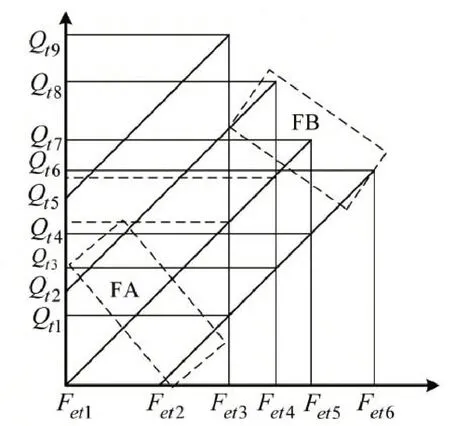
圖5 盾構機故障特征離群
4 故障診斷實驗
對復雜機電液盾構機故障特征離群故障診斷方法進行試驗驗證,利用盾構機工況模擬測試臺架構建了盾構機電液系統故障診斷集成化實驗環境,可以通過特定的標定工具進行在線實時參數標定[10],盾構機模擬臺架和電氣控制柜的集成化環境可以對電氣系統和附件裝置進行可變參數的模擬,在一個完整的故障模擬周期內進行故障診斷實驗,其中,盾構機故障診斷集成化實驗環境和實時試驗數據如圖6~8所示。
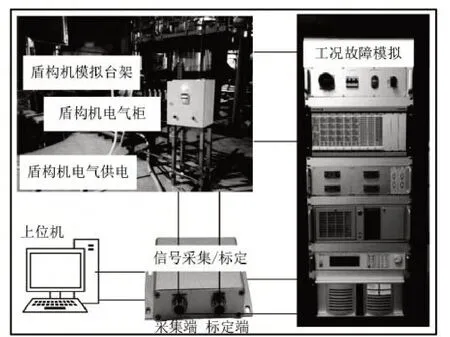
圖6 盾構機故障診斷集成化實驗環境
對盾構機主要的電液驅動節點和電氣附件進行了故障診斷實驗,采用真實故障注入的方法,其中,圖7是對盾構機不同的電液節點進行故障診斷精度的試驗驗證,在一個完整的故障注入周期內,采用故障特征離群故障診斷方法后,各個電液節點的故障診斷精度均達到了90 %以上,能夠很好的精確的對相關的故障進行監測;圖8是故障響應的結果,利用所設計的盾構機故障事件處理拓撲結構后,在不同的帶載狀態下,故障發生后會在相應的時間觸發故障響應機制,待故障恢復后,故障響應機制應該退出,此時,相應的功率器件應該在滿足帶載狀態下的功率需求,從圖中可以看出,盾構機故障恢復后,掘進輔助驅動電機的功率快速的提升,動態響應極為迅速,保證了盾構機在負荷狀態下的功率需求。

圖7 盾構機電液節點故障診斷精度
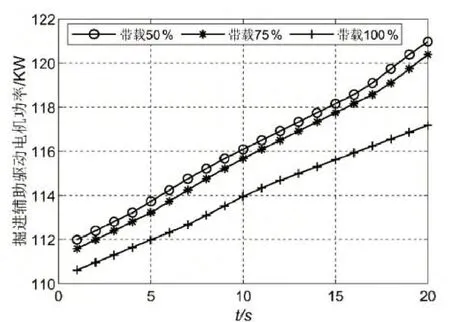
圖8 盾構機推進輔助驅動電機功率
5 結束語
復雜機電液盾構機掘進過程中極易出現各種故障,針對復雜多變工況下盾構機的故障診斷,在盾構機的系統機構基礎上,利用設計好的故障事件處理拓撲結構進行故障事件管理,采用故障特征值離群診斷方法進行電氣系統的故障監測,最后通過分析集成化故障診斷實驗結果得出所設計的盾構機故障診斷方法能夠有效的提升其診斷精度和故障診斷系統的穩定性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
