不同ISB模型對(duì)BDS-3/GPS精密單點(diǎn)定位性能的影響
2023-10-27 00:50:27宋承駿余學(xué)祥盧福康
現(xiàn)代信息科技 2023年17期
宋承駿 余學(xué)祥 盧福康
摘? 要:BDS-3衛(wèi)星導(dǎo)航系統(tǒng)已成功完成正式組合,基于此對(duì)BDS-3與GPS兩大衛(wèi)星之間的ISB對(duì)PPP定位性能的影響進(jìn)行評(píng)估。通過(guò)MGEX(Multi-GNSS Experiment)選取12個(gè)測(cè)站連續(xù)5天的觀測(cè)數(shù)據(jù)進(jìn)行分析,可以得出3種不同的ISB處理模型,最初ISB值變化較大,之后其值會(huì)達(dá)到一個(gè)穩(wěn)定的狀態(tài)。其中PPP-CT與PPP-RW兩種計(jì)算出的ISB值基本相同,大于PPP-WN計(jì)算的值。對(duì)于靜態(tài)定位性能,PPP-RW的定位精度高于PPP-CT和PPP-WN;相比于PPP-CT,PPP-RW與PPP-WN在E、N、U方向上收斂時(shí)間有一定的提升;對(duì)于動(dòng)態(tài)定位性能,PPP-RW的定位精度和PPP-CT的定位精度相當(dāng),均略高于PPP-WN,且3個(gè)模型的收斂時(shí)間處于同一個(gè)水平。
關(guān)鍵詞:PPP;ISB;白噪聲;常數(shù)估計(jì);隨機(jī)游走估計(jì)
中圖分類號(hào):TP39;P228.4 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2023)17-0032-05
The Influence of Different ISB Models on the Performance of BDS-3/GPS Precision Single Point Positioning
SONG Chengjun1,2,3, YU Xuexiang1,2,3, LU Fukang1,2,3
(1.School of Space Information and Surveying Engineering, Anhui University of Science and Technology, Huainan? 232001, China; 2.Key Laboratory of Aviation-aerospace-ground Cooperative Monitoring and Early Warning of Coal Mining-induced Disasters of Anhui Higher Education Institutes, Anhui University of Science and Technology, Huainan? 232001, China; 3.Coal Industry Engineering Research Center of Mining Area Environmental and Disaster Cooperative Monitoring, Anhui University of Science and Technology, Huainan? 232001, China)
Abstract: The BDS-3 satellite navigation system has successfully completed its official integration, and based on this, the impact of ISB between BDS-3 and GPS on PPP positioning performance is evaluated. By using MGEX (Multi-GNSS Experiment) to select observation data from 12 stations for 5 consecutive days for analysis, three different ISB processing models can be obtained. Initially, the ISB value changes significantly, but later it reaches a stable state. The ISB values calculated by PPP-CT and PPP-RW are basically the same, greater than the values calculated by PPP-WN. For static positioning performance, the positioning accuracy of PPP-RW is higher than that of PPP-CT and PPP-WN; compared to PPP-CT, PPP-RW and PPP-WN have a certain improvement in convergence time in the E, N, and U directions; for dynamic positioning performance, the positioning accuracy of PPP-RW is comparable to that of PPP-CT, both slightly higher than that of PPP-WN, and the convergence time of the three models is at the same level.
Keywords: PPP; ISB; white noise; constant estimation; random walk estimation
0? 引? 言
北斗衛(wèi)星導(dǎo)航系統(tǒng),也稱為北斗導(dǎo)航系統(tǒng),是由中國(guó)自主研發(fā)的全球衛(wèi)星導(dǎo)航系統(tǒng)。也是全球第四個(gè)可用于民用領(lǐng)域和軍用領(lǐng)域的衛(wèi)星導(dǎo)航系統(tǒng)。北斗系統(tǒng)由一系列星座衛(wèi)星、地面控制系統(tǒng)、用戶終端組成。目前,北斗系統(tǒng)已經(jīng)完成了從BDS-2到BDS-3的建設(shè),能夠?yàn)槿蛴脩籼峁└呔鹊亩ㄎ弧?dǎo)航、時(shí)間服務(wù)。
中國(guó)的北斗系統(tǒng)主要由兩個(gè)部分組成:衛(wèi)星部分和地面控制系統(tǒng),具有全球覆蓋性、多系統(tǒng)兼容性、高精度性、高可靠性、多應(yīng)用性、安全保密性高等優(yōu)點(diǎn)。如今,北斗系統(tǒng)已經(jīng)在交通運(yùn)輸領(lǐng)域、測(cè)繪領(lǐng)域、公共安全領(lǐng)域、精準(zhǔn)農(nóng)業(yè)領(lǐng)域等得到了廣泛的應(yīng)用,對(duì)于國(guó)家經(jīng)濟(jì)建設(shè)和社會(huì)發(fā)展具有舉足輕重的作用。
精密單點(diǎn)定位(Precise Point Positioning, PPP)是利用全球若干地面跟蹤站的GPS觀測(cè)數(shù)據(jù)計(jì)算出的精密衛(wèi)星軌道和衛(wèi)星鐘差,對(duì)單臺(tái)GPS接收機(jī)所采集的相位和偽距觀測(cè)值進(jìn)行定位解算,依托其成本低、適用維度廣和無(wú)固定基站約束等優(yōu)勢(shì)而受到廣泛的關(guān)注和研究。
隨著2020年7月BDS-3系統(tǒng)正式建成并開(kāi)通[1],使得BDS-3在PPP方面的研究成為好多方面的熱點(diǎn)研究,比如BDS-3新頻點(diǎn)BIC、B2a的增加,使其成為研究的一個(gè)熱點(diǎn)。如今衛(wèi)星系統(tǒng)向著全球衛(wèi)星組合系統(tǒng)方面應(yīng)用,在多衛(wèi)星系統(tǒng)GNSS處理中,各衛(wèi)星系統(tǒng)之間存在時(shí)間基準(zhǔn)的差異,因此我們?cè)谘芯啃l(wèi)星組合系統(tǒng)的時(shí)候需要考慮衛(wèi)星系統(tǒng)之間的系統(tǒng)偏差(Inter System Bias, ISB)[2-5]。大多數(shù)學(xué)者對(duì)ISB的來(lái)源、特性和模型進(jìn)行了充分的研究,隨著B(niǎo)DS-3衛(wèi)星系統(tǒng)的成立,給全球市場(chǎng)帶來(lái)了許多痛點(diǎn)的解決希望,從而引發(fā)了國(guó)內(nèi)外學(xué)者對(duì)BDS-3系統(tǒng)導(dǎo)航以及組合導(dǎo)航進(jìn)行方方面面的研究。由于以上原因,國(guó)內(nèi)外學(xué)者反而對(duì)于BDS-3/GPS之間的系統(tǒng)偏差(ISB)問(wèn)題存在著一定的忽略,并且對(duì)因BDS-3/GPS之間ISB處理方法的差異產(chǎn)生的對(duì)PPP定位性能的影響的研究較少。本文基于BDS-3/GPS非差組合模型,分別將ISB當(dāng)作常數(shù)模型[6]、隨機(jī)游走模型[7]和白噪聲估計(jì)模型[8]進(jìn)行處理,選取5天MGEX多個(gè)測(cè)站數(shù)據(jù)采用PPP動(dòng)靜態(tài)處理進(jìn)行解算,分析ISB的特性,并評(píng)估PPP的收斂時(shí)間和定位精度[9,10]。
1? 模型及參數(shù)處理策略
1.1? BDS-3/GPS非差非組合精密單點(diǎn)定位模型
定位模型為非差非組合函數(shù)模型。在此將ISB參數(shù)引入,并把GPS接收機(jī)鐘差用作參考量,得出BDS-3/GPS的觀測(cè)方程為:
式中,、 分別為偽距和載波觀測(cè)值,s、G分別為PRN衛(wèi)星號(hào)和GPS衛(wèi)星系統(tǒng),下標(biāo)r為接收機(jī)ID,j為觀測(cè)值頻段號(hào);ρ為衛(wèi)星在地面測(cè)站的幾何長(zhǎng)度,λ為同一頻率f上的載波長(zhǎng)度,c為光速, 為接收機(jī)鐘差, 為衛(wèi)星鐘差,ZWDt為對(duì)應(yīng)測(cè)站天頂方向時(shí)延遲, 為跟衛(wèi)星高度角相關(guān)濕延遲方向的投影函數(shù), 為頻率f1所對(duì)應(yīng)的斜方向上的電離層延遲, 為電離層延遲方向的放大因子, 其取值與衛(wèi)星系統(tǒng)呈現(xiàn)相關(guān)性而與衛(wèi)星PRN無(wú)關(guān)聯(lián), 和? 分別為頻率相關(guān)的接收機(jī)和衛(wèi)星未校正的偽距硬件延遲, 和? 分別為頻率相關(guān)的接收機(jī)和衛(wèi)星未校正的相位硬件延遲, 為載波整周模糊度, 為BDS-3與GPS之間的系統(tǒng)誤差, 和? 為相位和偽距其他未模型的誤差之和。該模型的待估參數(shù)X為:
1.2? 隨機(jī)模型
在進(jìn)行觀測(cè)衛(wèi)星信號(hào)的過(guò)程中,由于衛(wèi)星高度角有高有低,PPP定位結(jié)算時(shí)會(huì)產(chǎn)生不同程度的多余觀測(cè)值,比如多路徑效應(yīng)、大氣誤差等影響而產(chǎn)生的觀測(cè)噪聲,這可能會(huì)是量大而繁雜的。因此,我們需要考慮到隨機(jī)模型的選擇對(duì)參數(shù)估計(jì)精度產(chǎn)生的影響問(wèn)題。高度角定權(quán)的隨機(jī)模型是本文選擇的隨機(jī)模型,而這也是GNSS定位中經(jīng)常被人們所使用的方法。E與觀測(cè)噪聲值σ2存在如下函數(shù)關(guān)系:
式中, 和? 分別為偽距單點(diǎn)定位(SPP)計(jì)算的ISB值和其對(duì)應(yīng)的先驗(yàn)方差。
2? 實(shí)驗(yàn)數(shù)據(jù)及處理策略
本文選取MGEX12個(gè)測(cè)站2021年2月27日起連續(xù)5天的觀測(cè)數(shù)據(jù)對(duì)GPS/BDS-3的ISB進(jìn)行性能分析。本次實(shí)驗(yàn)選取的是WHU提供的精密星歷和精密鐘差,天線相位選取的是IGS14.atx,如表1所示。
3? 實(shí)驗(yàn)分析
本文通過(guò)靜態(tài)和動(dòng)態(tài)實(shí)驗(yàn),對(duì)不同ISB模型進(jìn)行對(duì)比分析,并且進(jìn)行了PPP定位性能分析。實(shí)驗(yàn)通過(guò)對(duì)多系統(tǒng)非組合的PPP模型的定位性能分析,從而驗(yàn)證解算ISB的可靠性。以CUSV站為例,如圖1(a)顯示衛(wèi)星可見(jiàn)數(shù)的對(duì)比結(jié)果,結(jié)果顯示BDS-3和GPS的可用衛(wèi)星數(shù)相差不大,但是組合系統(tǒng)具有明顯高于蛋系統(tǒng)的衛(wèi)星可見(jiàn)數(shù)。圖1(b)可見(jiàn)PDOP值對(duì)比結(jié)果,組合系統(tǒng)的值顯然比單系統(tǒng)小,得出組合系統(tǒng)較穩(wěn)定的結(jié)論。分析表明,組合衛(wèi)星系統(tǒng)能夠改善衛(wèi)星的空間結(jié)構(gòu),從而提高PPP定位性能。
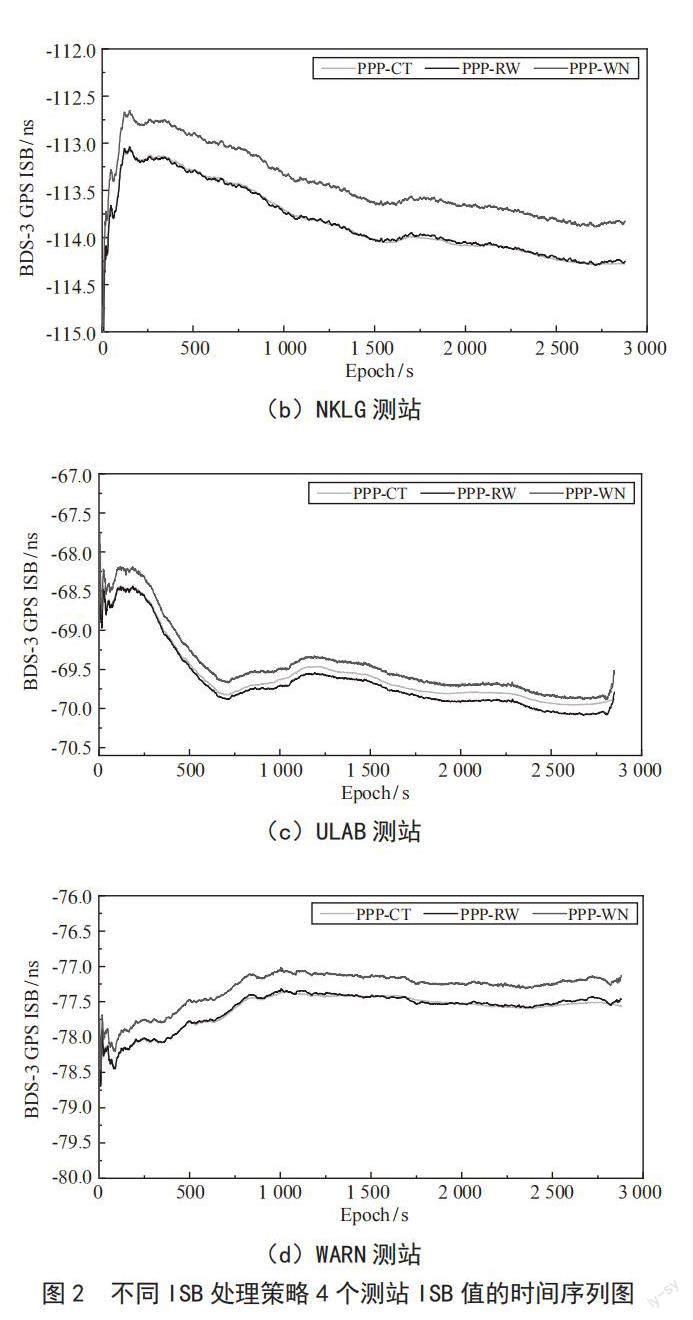
以CUSV、NKLG、ULAB、WARN四個(gè)測(cè)站為例,圖2給出了2021年2月27日不同ISB處理策略ISB時(shí)間序列值,從4個(gè)測(cè)站3種不同的ISB處理策略可以看出都是剛開(kāi)始階段ISB變化較大,達(dá)到穩(wěn)定之后,ISB的值就會(huì)趨于一個(gè)穩(wěn)定狀態(tài),對(duì)于3種不同的ISB處理策略,可用看出PPP-CT與PPP-RW兩種處理策略計(jì)算出的ISB值基本相同,均比PPP-CT計(jì)算的值大。
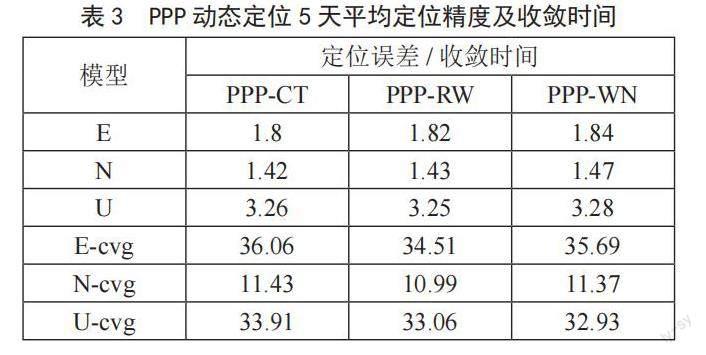
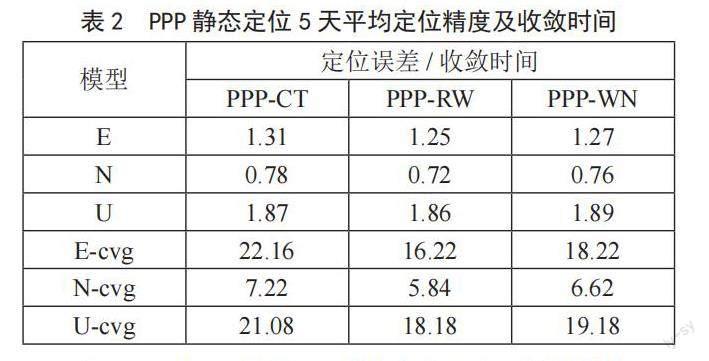
表2和表3給出了3種不同ISB模型下的PPP靜態(tài)和動(dòng)態(tài)定位5天平均定位精度及收斂時(shí)間結(jié)果統(tǒng)計(jì)。在靜態(tài)定位上可以看出3種不同定位模型,N方向上的定位精度高于E、U方向的定位精度,PPP-RW的定位精度高于PPP-CT和PPP-WN;在收斂時(shí)間上,相比于PPP-CT,PPP-RW與PPP-WN在E方向上分別提升了26.8%、17.7%,N方向上分別提升了19.1%、8.3%,U方向上分別提升了10.8%、9.0%。在動(dòng)態(tài)定位上,3種不同定位模型N方向上的定位精度高于E、U方向的定位精度;PPP-RW的定位精度和PPP-CT的定位精度相當(dāng),略高于PPP-WN的定位精度;在收斂時(shí)間上,3個(gè)模型的收斂時(shí)間在同一個(gè)水平上。
4? 結(jié)? 論
本文通過(guò)對(duì)BDS-3與GPS之間的ISB用3種模型對(duì)其進(jìn)行建模,然后選取MGEX中心12個(gè)測(cè)站進(jìn)行實(shí)驗(yàn)分析。可以得出以下結(jié)論:
1)剛開(kāi)始階段ISB變化較大,之后,ISB的值則會(huì)趨于一個(gè)穩(wěn)定狀態(tài),對(duì)于3種不同的ISB處理策略,PPP-CT與PPP-RW計(jì)算出的ISB值基本相同,都大于PPP-CT計(jì)算的值。
2)對(duì)于靜態(tài)定位PPP,PPP-RW的定位精度高于PPP-CT和PPP-WN;在收斂時(shí)間上,相比于PPP-CT,PPP-RW與PPP-WN在E方向上分別提升了26.8%、17.7%,N方向上分別提升了19.1%、8.3%,U方向上分別提升了10.8%、9.0%。對(duì)于動(dòng)態(tài)定位,PPP-RW的定位精度和PPP-CT的定位精度相當(dāng),略高于PPP-WN的定位精度;在收斂時(shí)間上,3個(gè)模型的收斂時(shí)間在同一個(gè)水平。
參考文獻(xiàn):
[1] 張小紅,李星星,李盼.GNSS精密單點(diǎn)定位技術(shù)及應(yīng)用進(jìn)展 [J].測(cè)繪學(xué)報(bào),2017,46(10):1399-1407.
[2] 張小紅,胡家歡,任曉東.PPP/PPP-RTK新進(jìn)展與北斗/GNSS PPP定位性能比較 [J].測(cè)繪學(xué)報(bào),2020,49(9):1084-1100.
[3] 朱松,毛勇,易文婷,等.北斗系統(tǒng)PPP定位精度及收斂速度分析 [J].大地測(cè)量與地球動(dòng)力學(xué),2021,41(2):122-124.
[4] 譚述森.北斗系統(tǒng)創(chuàng)新發(fā)展與前景預(yù)測(cè) [J].測(cè)繪學(xué)報(bào),2017,46(10):1284-1289.
[5] 張郅一,程凌岳,謝新.基于不同ISB估計(jì)模型的多GNSS組合實(shí)時(shí)精密單點(diǎn)定位性能分析 [J].測(cè)繪地理信息,2023(4):51-55.
[6] 周楊,陳俊平,伍吉倉(cāng).梯度估計(jì)對(duì)基于對(duì)流層分段常數(shù)模型的PPP的影響 [C]//中國(guó)衛(wèi)星導(dǎo)航學(xué)術(shù)年會(huì)組委會(huì).第十屆中國(guó)衛(wèi)星導(dǎo)航學(xué)術(shù)年會(huì)論文集——S02導(dǎo)航與位置服務(wù).北京:[出版者不詳].2019:78-82.
[7] 李宏宇,楊福鑫,趙琳,等.頻間偏差隨機(jī)模型對(duì)北斗三頻非差非組合PPP性能的影響分析 [C]//中國(guó)衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室學(xué)術(shù)交流中心.第十一屆中國(guó)衛(wèi)星導(dǎo)航年會(huì)論文集——S05空間基準(zhǔn)與精密定位.成都:[出版者不詳],2020:79-86.
[8] 劉衛(wèi).多通道高斯白噪聲模型中導(dǎo)函數(shù)的小波點(diǎn)態(tài)估計(jì) [D].北京:北京工業(yè)大學(xué),2019.
[9] 譚涵.BDS-3精密單點(diǎn)定位模糊度解算及性能評(píng)估 [J].全球定位系統(tǒng),2022,47(6):79-85.
[10] 李燕敏,艾孝軍,賀凱盈.BDS實(shí)時(shí)精密單點(diǎn)定位性能分析 [J].無(wú)線電工程,2023,53(5):1024-1031.
作者簡(jiǎn)介:宋承駿(1999—),男,漢族,江蘇連云港人,碩士研究生在讀,研究方向:GNSS數(shù)據(jù)處理。