SCADA系統在輸氣管道清管器追蹤定位中的應用探索與實現
2023-10-27 00:50:27王恒
現代信息科技 2023年17期

摘? 要:以潛江至郴州輸氣管道清管作業過程為例,基于差壓法追蹤清管器在線定位的方法,探索SCADA系統在輸氣管道清管器追蹤定位中應用的可行性。通過協調進氣流量,控制清管器運行速度,選擇在閥室和進出站進行人工監聽。同時,利用SCADA系統壓力監測模塊觀測清管器運行、停滯、到達及其通過監測點的壓力波動情況。SCADA系統監測結果與人工監聽結果具有極好的吻合性,驗證了SCADA系統在輸氣管道清管器追蹤定位中應用的有效性。
關鍵詞:SCADA系統;輸氣管道;差壓法;清管器;追蹤定位
中圖分類號:TP39? 文獻標識碼:A? ? 文章編號:2096-4706(2023)17-0040-07
Application Exploration and Implementation of SCADA System in Tracking and Positioning of Gas Pipeline Cleaner
WANG Heng
(Huguang Gas Transmission Branch of PipeChina West East Gas Pipeline Company, Changsha? 410016, China)
Abstract: Taking the cleaning process of the Qianjiang to Chenzhou gas pipeline as an example, based on the method of differential pressure method tracking pipeline cleaner online positioning, the feasibility of the application of SCADA system in the tracking and positioning of the gas pipeline cleaner is explored. By coordinating the intake flow rate and controlling the running speed of the pipeline cleaner, manual monitoring at the valve chamber and inlet and outlet stations is selected. At the same time, use the SCADA system pressure monitoring module to observe the pressure fluctuations of the pipeline cleaner during operation, stagnation, arrival, and passing through the monitoring points. The monitoring results of the SCADA system have excellent consistency with the results of manual monitoring, verifying the effectiveness of the SCADA system in the tracking and positioning of gas pipeline cleaner.
Keywords: SCADA system; gas pipeline; differential pressure method; pipeline cleaner; tracing and positioning
0? 引? 言
SCADA(Supervisory Control And Data Acquisition)系統是對生產過程進行控制與調度的自動化系統,在長輸天然氣管道中已有廣泛應用[1-3]。長輸管道SCADA系統主要由調控中心的中控系統(DCC)、輸氣站場的站控系統(SCS)、通信系統(COMM)三部分構成,能夠實現遙信、遙測、遙控和遙調的“四遙”功能。輸氣站場、閥室內的各種工藝設備及工藝參數的采集、監視、控制、保護等全部能由SCADA系統完成[4-6]。然而,如何利用SCADA系統實現清管器在管道內運行狀態監測的應用仍然較少。
隨著全國一張網的構建,中國天然氣長輸管道建設和投產運行進入快速發展期,清管作業越加頻繁,清管技術亦不斷革新,常用的清管器追蹤方法有聲波[7]、電磁感應[8]、放射性同位素、壓力脈沖里程輪定位以及極低頻電磁脈沖[9]等。但在實際作業中,這些定位方法依然存在清管器運行速度預測方法精度低、適應性差,難以讓清管器與外界建立穩定、持續的聯系等問題[10-12]。
基于差壓法的遠程無線跟蹤定位法是通過遠程無線傳輸技術將作業現場的壓力信號傳送至遠程監控中心,借助于監測系統的模式識別算法對壓力信號進行分析判斷,進而捕捉作業狀態的一種技術[13-15]。該定位技術具有不受外界因素影響、采樣頻率高等優勢,在輸油管道泄漏定位方面有著較為成熟的應用,采用此技術可以較為準確的判斷管道中清管器的運行位置[16-18]。然而,由于天然氣管道中氣體的可壓縮性,采用差壓法定位天然氣管道中清管器運行位置仍存在一定的困難,缺乏與SCADA系統聯用監測的應用經驗。
本文擬利用先進SCADA系統壓力參數的采集、監視功能,通過觀測清管器運行途徑閥室監測點壓力變化曲線,實現清管器的在線跟蹤和精確定位。以潛江—郴州輸氣管道清管作業過程為例,在每段清管區間采用2個中密度和1個高密度聚氨酯泡沫清管器的清管方式,過盈量設置為3%~5%。將SCADA系統采集的沿線收發球站場、沿線閥室在清管器運行期間的壓力數據,與人工監聽結果進行對比,探索SCADA系統在輸氣管道清管器追蹤定位的可行性,為SCADA系統在清管器在線跟蹤中的有效應用提供重要參考。
1? SCADA系統壓力監測模塊在清管器運行過程中的波形圖
清管器在管道內運行時,利用SCADA系統采集的收發球站場和沿線閥室壓力歷史趨勢圖,可以輔助進行清管器運行狀態的判斷,在一定程度能夠實現清管器運行狀態的可視化。
清管器在管道內運行靠的是清管器前后具有的一定壓差,即清管器后的壓力需大于清管器前的壓力[19,20]。值得注意的是,對于泡沫清管器,由于其重量輕,運行期間所需的差壓小(本次作業中清管器正常發出壓差約0.05 MPa),利用該方法監測時需將在SCADA界面上清管段沿線閥室壓力變送器的壓力軸和時間軸顯示區間進行縮小(增加SCADA界面壓變壓力趨勢波動時的敏感性),壓力一般可縮小到運行壓力上下各0.2~0.3 MPa左右,時間軸顯示區間調整為20 min。
當清管器在球筒發出至通過發球筒下游三通處時,管線的壓變示數會先下降,后較快升高,當清管器通過發球筒下游三通后穩定運行時,發球筒下游三通處的壓變示數會達到一個穩定的數值狀態;當清管器未通過下游監測點(閥室)的壓力變送器時,下游監測點(閥室)壓力變送器檢測到的壓力波動變化的趨勢是一致的,同時增大或減小;當清管器剛通過監測點(閥室)時,監測點(閥室)壓力變送器突增;當清管器停滯時,清管器運行管段上游監測點(閥室)的壓力示數上升,下游監測點(閥室)的壓力示數減低;當清管器入收球筒時,收球筒上游入口三通處壓變的數值會突增,并達到一個穩定的狀態。通過觀察監測閥室壓變采集的所有數據波形,提取到5個特征比較典型的信號狀態,分別為清管器發出狀態和清管器入桶狀態、清管器平穩運行狀態、清管器通過閥室狀態、清管器卡滯狀態。
1.1? 清管器平穩運行狀態
通過實時監測清管器運行管段的上游閥室(已通過的監測點)壓變數值、下游閥室壓變數值(未通過的監測點),可以發現,清管器平穩運行時,上游閥室和下游閥室的壓力均處于一個相對平穩的狀態,結果如圖1所示。
1.2? 清管器通過閥室時狀態
通過實時監測清管器運行管段的上游閥室(已通過的監測點)壓變數值、中間閥室壓變數值(正通過的監測點)、下游閥室壓變數值(未通過的監測點),可以發現,清管器通過監測點時,清管器前和清管器后閥室的壓力均處于一個相對平穩的狀態。正通過的閥室壓力會出現突增,清管器通過后壓力在突增后的壓力值附近達到一個相對平穩的狀態,如圖2所示。
為了確認清管器通過中間閥室壓變數值(正通過的監測點)的可靠性,除了利用管線上下游監測點(閥室)壓變的變化趨勢進行宏觀判斷外,鑒于每個監測點(閥室)干線截斷閥的上下游5 m左右均安裝有一塊壓力變送器,如圖3所示,利用剛通過監測點(閥室)干線截斷閥上下游5 m左右的兩個壓變的歷史數據進行復核,當清管器運行在監測點(閥室)干線截斷閥上下游5 m左右的兩個壓力變送器中間時,上游側壓變檢測到的壓力值會突增,當清管器全部通過監測點(閥室)干線截斷閥上下游5 m左右的兩個壓力變送器時,監測點(閥室)干線截斷閥下游5 m處壓力變送器壓力也將突增,通過兩個壓變突增存在時間差可準確判斷清管器是否經過。
1.3? 清管器卡滯狀態
通過實時監測清管器運行管段的上游閥室(已通過的監測點)壓變數值、下游閥室壓變數值(未通過的監測點),可以發現,清管器卡滯狀態時,清管器前(下游閥室)不斷下降,清管器后(上游閥室)的壓力不斷升高,當清管器前、后壓差足夠大推動清管器前進后,清管器前、后壓差迅速減小,監測結果如圖4所示。
1.4? 清管器發出或入桶狀態
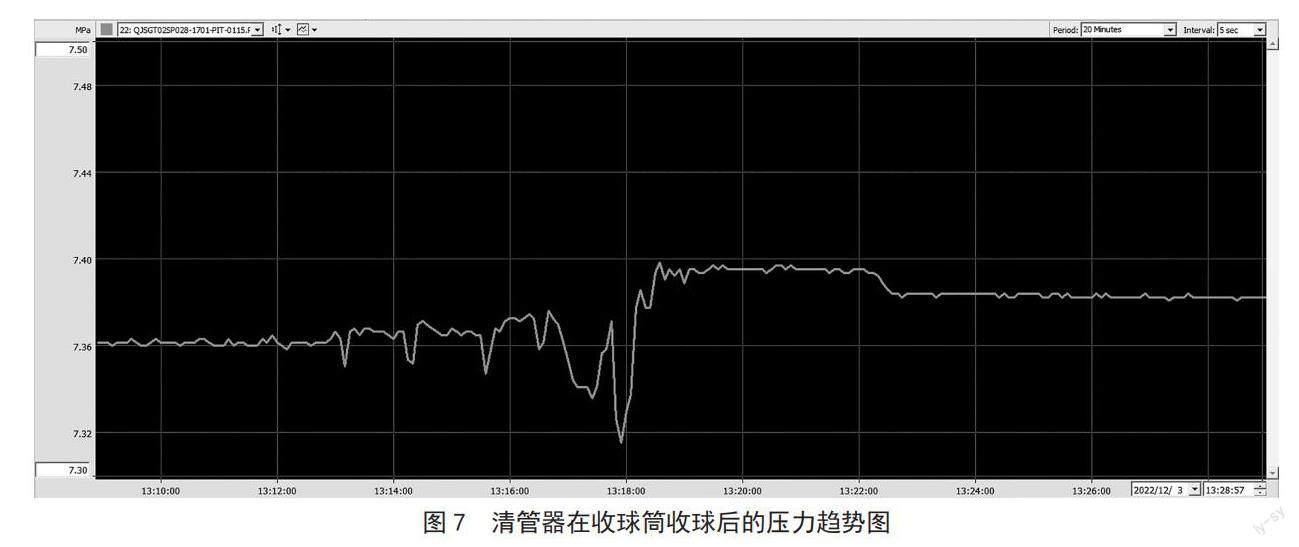
由圖5、6和7可知,通過實時監測清管器收發球站球筒三通壓變數值,可以發現,清管器經過三通壓力監測點時壓力會出現突增,清管器發出或進入球筒后監測點的壓力在突增后的壓力值附近達到一個相對平穩的狀態。清管器發出和清管器進入球筒壓力曲線不同之處在于,清管器經過收球筒三通壓力監測點后,在三通至進入球筒這段時間,當清管器較為完整的情況下,收球筒三通處的壓力因清管器與管道內壁仍處于密封狀態,突增后的壓力會維持到清管器完全進入球筒,此后該處的壓力會略有下降。
2? SCADA系統在潛江—郴州輸氣管道清管中的應用
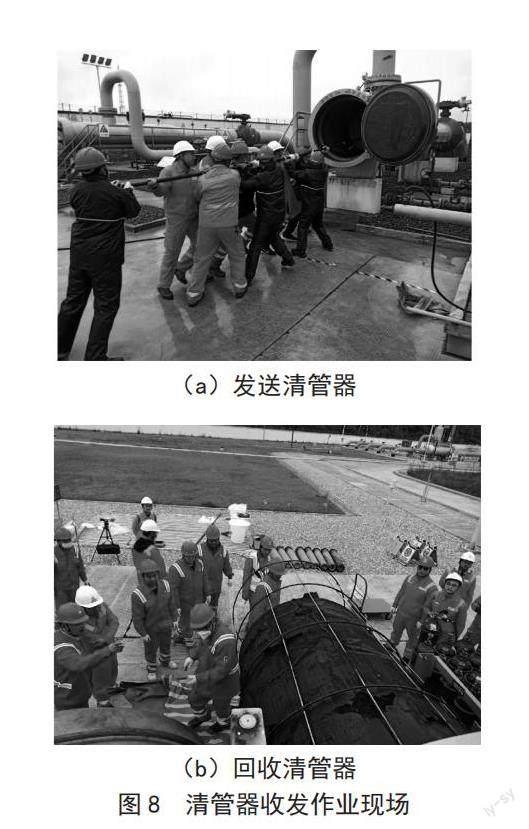
潛江至郴州輸氣管道總長631.5 km,管道材質為X70鋼,設計壓力10 MPa,管徑1 016 mm,壁厚為17.5、21、26.2 mm。管道沿線途經湖北潛江、監利,湖南岳陽、長沙、株洲、衡陽、郴州,共有截斷閥室31座,站場7座。清管作業于2022年10月24日—12月3日期間開展,分為潛江—岳陽、郴州—衡陽、衡陽—株洲、株洲—岳陽四個清管段,累計發送中、高密度泡沫清管器10個,此次清管作業為投產運行來首次清管作業,清管期間管段運行壓力約6 MPa,日均分輸量60萬方/天,清管期間轉供氣量由調控中心控制。清管器收發作業現場如圖8所示。
分別對潛江—岳陽段,株洲—岳陽段使用中、高密度泡沫器清管如表1、表2所示,在運行過程中驗證了SCADA系統壓力監測模塊在清管器不同運行速度情況下定位的準確性。分析數據發現潛江—岳陽段(該段作業時接收川氣東送潛江壓氣站來氣作為氣源)清管器平均球速維持在2 m/s以上速度運行,清管器運行平穩,理論計算出的到達時間與實際到達時間基本一致;但株洲—岳陽段(該段作業時接收西二線韶關站來氣作為氣源)球速在1.5 m/s以下速度運行時,理論計算出的到達時間與實際到達時間差距較大,主要原因為清管器在管道內運行時距離氣源轉供點較遠,由于天然氣的可壓縮性,清管器對進氣端流量變化不敏感,且該段管內污物較多,清管器處于非平穩運行狀態,清管器時而運行,時而停滯。在清管器處于非平穩運行狀態時,清管器卡滯狀態曲線可以很直觀地觀察到清管器的運行狀態及當前的運行區間,極大地彌補了不能準確預測清管器到達時間的不足,為現場的人工追蹤定位提供了強有力的支撐。
清管作業中,站場的磁力式過球指示器均無法檢測到泡沫清管器是否通過,清管器出發球筒和進收球筒依靠人工監聽,通過對收發球筒出入口三通附近的壓變示數分析,形成了人工監聽與壓力示數監測數值趨勢的對比,對準確判斷清管器是否發出或入球筒,減少人為誤差具有重要意義。同時采用此方法清管過程中,無須在發球筒下游出口處和收球筒上游進口處,以及發球站場出站后和收球站場進站前安排專人實時負責監聽,減少了現場人員的勞動強度。
清管過程中清管器因推力不足或管道內污物阻擋,不能平穩運行時,無論是氣量估算法還是距離速度估算法,均不能準確預判球到達的時間,現場監聽人員也會因清管器比預計到達時間偏差過大,而導致不能準確判斷球是否已通過監測點,通過SCADA系統可準確判斷球的運行區間,避免因人為判斷而導致丟球事件的發生。
清管過程中清管器平穩運行時,通過SCADA采集到清管器通過的監測點時間更為精確,減小了人為判斷誤差,通過距離速度估算法能很好地對球到達下一監測點進行預測。
3? 結? 論
1)潛江—郴州輸氣管道使用中密度和高密度的聚氨酯泡沫清管器對不同管段實施清管作業,打開收發球筒盲板作業過程中的氮氣置換作業用時較長,平均3.5小時左右。建議清管作業前準備注氮管匯等設備,提高氮氣置換效率。
2)清管器距離氣源上載點較遠時,建議發球前1個小時即開始進行接氣和轉供,提前在管道建立壓差,便于清管器的發送和監測。
3)在清管器的輔助監聽上,SCADA系統作為生產運行監控系統,監控清管器的運行狀態時不需要增加任何額外的輔助設備,采樣頻率高,精確方便。但在清管前應組織對閥室壓力變送器示數進行現場和遠程檢查核對,確保示數準確。同時綜合考慮清管期間清管段的作業計劃,避免清管過程中出現壓力變送器拆卸送檢或影響壓力變送器運行的作業,方便調度人員監測清管器的運行。
4)利用清管器在運行過程中產生的壓力波動,可準確的判斷清管器是否通過監測閥室,在運行區間段是平穩運行還是停滯狀態,避免現場追蹤人員因誤判或監聽不及時導致丟球情況對整個作業計劃的影響,其適用性強,靈敏度高,無論清管器速度快慢,均能準確判斷,對指導現場追蹤人員跟蹤定位清管器具有較強的實用價值。
5)利用SCADA系統跟蹤定位方法,可以在一定程度上減少清管器跟蹤定位過程中人工和車輛所產生的費用,同時不受天氣、路況、疫情等因素的影響。
參考文獻:
[1] GEIGER G,HAZEL T,VOGT D. Integrated SCADA-based approach for pipeline security and operation [C]//2010 Record of Conference Papers Industry Applications Society 57th Annual Petroleum and Chemical Industry Conference (PCIC).San Antonio:IEEE,2010:1-8.
[2] 張世斌,賈立東,魏義昕,等.輸氣管道SCADA系統網絡安全策略探索與實現——以中俄東線天然氣管道工程為例 [J].油氣儲運,2020,39(6):685-691.
[3] GHOSH S,SAMPALLI S. A Survey of Security in SCADA Networks:Current Issues and Future Challenges [J].Access,2019,7:135812-135831.
[4] CHOUBINEH A,WOOD D A,CHOUBINEH Z. Applying separately cost-sensitive learning and Fisher's discriminant analysis to address the class imbalance problem:A case study involving a virtual gas pipeline SCADA system [J].International Journal of Critical Infrastructure Protection,2020,29:100357[2023-01-06].https://doi.org/10.1016/j.ijcip.2020.100357.
[5] LAKHOUA M N,LAADHARI H. Supervision of the Natural Gas Station Using a SCADA System [J].Journal of Electrical and Electronics Engineering,2013,6(1):51-54.
[6] JOSHI R S,PATIL P P,DALAVI R N,et al. A Review on Monitoring and Control Parameters of Gas Pipeline by Using PLC and Scada System [J].International Journal of Engineering Applied Sciences and Technology,2020,4(12):628-631.
[7] HUANG C,PENG F,LIU K. Pipeline Inspection Gauge Positioning System Based on Optical Fiber Distributed Acoustic Sensing [J].IEEE Sensors Journal,2021,21(22):25716-25722.
[8] PIAO G Y,GUO J B,HU T H,et al. High-Sensitivity Real-Time Tracking System for High-Speed Pipeline Inspection Gauge [J].Sensors,2019,19(3):731.
[9] HEO C G,IM S H,JEONG H S,et al. Magnetic Hysteresis Analysis of a Pipeline Re-Inspection by Using Preisach Model [J].IEEE Transactions on Magnetics,2020,56(3):1-4.
[10] 趙寧,馬爽.油氣管道清管技術探析 [J].渤海大學學報:自然科學版,2020,41(1):86-89.
[11] 席海宏.天然氣長輸管道清管器運行速度預測 [J].油氣儲運,2020,39(11):1286-1291.
[12] 王子涵,秦超.低輸量管道清管器運行速度控制方法及建議 [J].油氣儲運,2022,41(5):592-600.
[13] 邱紅輝,王海明,孫巍,等.清管器跟蹤定位技術發展現狀與趨勢 [J].油氣儲運,2015,34(10):1033-1037.
[14] CHEN J H,HE L M,LUO X M,et al. Characterization of bypass pig velocity in gas pipeline:An experimental and analytical study [J].Journal of Natural Gas Science and Engineering,2020,73:103059.
[15] PATRICIO R A C,BAPTISTA R M,DE FREITAS RACHID F B,et al. Numerical simulation of pig motion in gas and liquid pipelines using the Flux-Corrected Transport method [J].Journal of Petroleum Science and Engineering,2020,189:106970.
[16] 曹讓富.基于壓力波與GPS長輸管線內檢測器實時定位模型 [D].成都:西南石油大學,2014.
[17] 張瑋瑋.基于壓力波法的清管器在線跟蹤定位方法研究與應用 [D].北京:北京化工大學,2022.
[18] 王雪莉,黨瑞,周琰,等.基于壓力波的清管器在線定位算法 [J].油氣儲運,2017,36(3):290-296.
[19] SADEGHI M H,CHITSAZ S,ETTEFAGH M M. Effect of PIGs physical parameters on dynamic behavior of above ground pipeline in pigging operation [J].Mechanical Systems and Signal Processing,2019,132:692-720.
[20] ZHOU J,DENG T,LIANG G C,et al. Experiment and Dynamic Simulation of PIG Motion during Pigging Operation in a Slope Pipeline [J/OL].International Journal of Chemical Reactor Engineering,2018,16(9).[2023-03-18].https://www.degruyter.com/document/doi/10.1515/ijcre-2018-0019/html.
作者簡介:王恒(1986—),男,漢族,河南南陽人,工程師,碩士,主要研究方向:生產運行管理工作。