基于LORA短程無線通信的特種車輛優先控制系統設計
2023-10-27 20:08:00王玉梅
現代信息科技 2023年17期
摘? 要:當今,特種車輛優先控制系統的功能大多是通過RFID電子標簽和RFID讀卡器實現的,這種系統的安裝組配比較耗時費力且管控界面不太友好,同時也不能顯示當前路口的管控狀態和信號燈的燈色,而且RFID讀卡器的成本較高,在安裝過程中需要架設專用桿件,在后期維護時還需要借助高架車來檢修,工程浩大,成本高昂。為此需要研究一種界面友好、安裝方便且可實時顯示路口燈色的特種車輛優先控制系統。該系統是基于平板地圖GPS導航系統和LORA短程無線組網技術實現的。
關鍵詞:特種車輛優先控制;RFID電子標簽;LORA;GPS
中圖分類號:TN929.5? ? 文獻標識碼:A? 文章編號:2096-4706(2023)17-0151-05
Design of Special Vehicle Priority Control System Based on LORA Short Range Wireless Communication
WANG Yumei
(1.Anhui Keli Information Industry Co., Ltd., Hefei? 230088, China; 2.Key Laboratory of Urban Traffic Management Integration and Optimization Technology, Ministry of Public Security, Hefei? 230088, China; 3.Anhui Intelligent Transportation Key Laboratory, Hefei? 230088, China)
Abstract: Nowadays, the functions of priority control systems for special vehicles are mostly achieved through RFID electronic tags and RFID card readers. The installation and assembly of such systems are time-consuming and laborious, and the control interface is not very friendly. At the same time, they cannot display the current control status of intersections and the color of signal lights. Moreover, the cost of RFID card readers is high, and special poles need to be installed during the installation process. In the later maintenance, elevated vehicles are also needed for maintenance, the project is vast and costly. Therefore, it is necessary to develop a special vehicle priority control system that is user-friendly, easy to install, and can display the color of intersection lights in real-time. This system is based on the flat map GPS navigation system and LORA short range wireless networking technology.
Keywords: priority control of special vehicle; RFID electronic tag; LORA; GPS
0? 引? 言
隨著城市的快速發展,機動車保有量持續增多,城市道路擁堵現象也愈發嚴重,車輛通行的速度越來越慢。諸如救護車、消防車之類的特種車輛是用以保障人民生命和財產安全的,如何有效保障特種車輛的快速通行極具現實意義。安徽科力信息產業有限責任公司深耕智能交通領域30余年。公司的使命是打造安全、便捷、綠色、智慧的出行環境。在致力于智能交通行業的30多年來一直在研究特種車輛優先控制系統,在多年研究的基礎上結合用戶實際需求開發出一套特種車輛優先控制系統。該特種車輛優先控制系統操作界面友好,不需要架設專用桿件,安裝使用非常方便。
1? 系統總體設計
1.1? 系統組成
特種車輛優先控制系統由特種車輛車載設備和特種車輛終端設備組成。特種車輛車載設備和特種車輛終端設備采用短程無線模塊433M LORA進行通信。特種車輛車載設備由平板電腦和車載設備組成,它們之間的通信模式為藍牙5.0無線通信。特種車輛終端設備與信號機之間的通信通過串行總線RS232實現。系統框圖如圖1所示。
1.2? 特種車輛設備車載端設計
特種車輛車載設備是整個設備的核心。它實時計算特種車輛的位置信息,在到達路口時通過LORA無線模塊將特種車輛的管控指令發送給特種車輛終端設備。特種車輛車載設備從特種車輛的點煙器接口獲得電量供給,器件選型上均選用工業級器件以提高設備的可靠性。特種車輛接收端設備使用的硬件器件和車載設備基本一致。
特種車輛車載設備主處理器采用STM32F103R8
T6,STM32F103R8T6是ST旗下一款常用的增強型系列微控制器。STM32F103R8T6具有5路串口,本設計中1路串口連接藍牙5.0模塊,1路串口連接433M無線發送模塊,1路串口為調試串口用于打印各種調試信息,另外2路串口預留連接其他設備之用。
電源芯片選用TI的LM46002,LM46002穩壓器是一款易于使用的同步降壓直流/直流轉換器,能夠驅動高達2 A的負載電流,輸入電壓范圍為3.5~60 V。該器件采用峰值電流控制實現簡單控制環路補償和逐周期電流限制。可選功能包括可編程開關頻率、同步、電源正常標志、精確使能、內部軟啟動、可擴展軟啟動、跟蹤。輕負載時的斷續傳導和自動降低頻率可改善輕負載效率。該系列只需很少的外部組件,器件的引腳排列可簡化并實現最優印刷PCB布局布線。保護功能包括熱關斷、VCC欠壓鎖定、逐周期電流限制和輸出短路保護。
藍牙模塊選用廣州立功科技公司的藍牙5.0模塊ZLG52810,ZLG52810是一款小尺寸、低功耗、低成本的新一代BLE5.0透傳模塊。ZLG52810工作于2.402~2.480 GHz免許可證ISM頻段,凈荷數據傳輸速率最高可達94 KB/s,協議上可兼容BLE 4.0/4.1/4.2/5.0。所有設置通過AT命令實現,理想環境下傳輸距離可達100 m。
特種車輛車載端和特種車輛終端之間的無線通信模塊選用433M的無線LORA模塊E22-400T30S。E22-400T30S是一款基于SEMTECH公司SX1268射頻芯片的無線串口模塊,具有多種傳輸方式,可工作在433~470 MHz頻段;采用全新一代LoRa擴頻技術,與SX1278相比距離更遠,功耗更低,體積更小;支持空中喚醒、無線配置、載波監聽、中繼組網等功能。E22-400T30S在低速率下的傳輸距離可達10 km,在實際測試中4 800 KB/s的空中速率下可穩定傳輸1 km,通信距離符合設計要求。
特種車輛設備車載端是整個設備的核心,它負責將特種車輛管控指令發送到終端設備,器件選型上基于安全可靠的設計思路,采用車輛的點煙器供電,以提高設備的可靠性。特種車輛設備接收端所用硬件器件與車載端基本一致。特種車輛車載設備硬件結構圖如圖2所示。
1.3? 特種車輛終端設備設計
特種車輛終端設備負責接收車載端設備傳送過來的指令信息,并負責向信號機轉發控制命令。主處理器、電源模塊和無線模塊選用與發射板相同的芯片或模塊,有利于程序移植和提高通信的可靠性。終端設備與信號機之間采用RS232接口進行通信。終端設備硬件結構圖如圖3所示。
1.4? 系統功能
特種車輛設備系統主要是基于短程無線通信技術實現交叉路口的交通信號優先控制,其主要功能如下:
1)路線管理。可根據起始地和目的地自動規劃行駛路線。用戶也可以根據自己的需求手動規劃行駛路線。
2)設備管理。車載設備可管理終端設備的設備編號,可根據設備編號管理控制相應路口的交通信號控制機。
3)設備導入。車載設備可導入其他車載設備的配置表,避免用戶重復設定。
4)無線通信。無線通信采用433M LORA寬頻無線傳輸技術,抗干擾能力強,通信距離不低于600 m,600 m數據傳輸的準確率大于95%。
5)傳輸通道。為避免無線同頻干擾,布置不少于10個無線傳輸通道,可以在各個路口設置不同的傳輸通道,車載設備可根據路口設置自動切換無線傳輸通道。
6)管控響應時間。在信號機端管控響應時間方面可設置管控最短綠燈時間,信號機收到管控命令后在當前階段運行最小綠燈時間后進入管控階段,管控階段運行結束后進入管控前階段的下一階段。
7)頭車尾車控制。特種車輛控制系統支持頭車尾車控制,減少特種車輛路口不必要的綠燈時間損失。特種車輛頭車發送控制請求(控制請求中包含該車隊路口的最長通過時間),信號機接收到控制命令經過最小綠燈時間后切換到管控相位。收到尾車發送的結束控制命令安全過渡后結束管控。為了安全起見,如沒有收到特種車輛尾車結束管控命令,信號機會在運行該車隊最長通過時間后自動結束特種車輛管控;如特種車輛車隊只有頭車,信號機會在運行該車隊的路口通過時間后就結束特種車輛管控。
8)管控優先級控制。目前一個路口支持多輛特種車輛優先。如先到的特種車輛優先級高,則執行先到優先級高特種車輛的管控。如先到的特種車輛優先級低但信號機已經執行該車的管控則在執行結束后切換到后來車輛的特種管控。如先到的特種車輛優先級低但信號機沒有執行優先控制則放行后來優先級高車輛請求的相位。
9)特種車輛系統平臺。特種車輛車載設備可通過平板的4G無線網絡連接到特種車輛系統平臺;特種車輛車載設備實時上傳自己的位置信息給平臺,便于相關人員查看當前所有特種車輛設備的運行狀態和位置信息。特種車輛管控軟件也能從平臺中獲取其他特種車輛的位置信息和路線信息,并會根據這些信息重新規劃路線,避免多個特種車輛在一個路口相遇,減少不必要的綠燈等候時間。
2? 系統工作原理
2.1? 系統工作流程
特種車輛優先控制系統包括特種車輛車載設備、特種車輛終端設備、交通信號控制機。特種車輛車載設備安裝在特種車輛上,通過車輛的點煙器接口獲得電量,LORA無線模塊的天線布置在車頂上;特種車輛車載設備通過平板電腦的GPS和4G網絡實現精準定位;車載平板電腦運行特種車輛控制軟件;特種車輛控制軟件可提供地圖導航、規劃路線、特種車輛設置、管控命令下發以及語音播報等功能。特種車輛終端設備安裝在交通信號控制機內部;LORA無線模塊的天線布設在信號機外殼的頂端;特種車輛終端設備負責接收處理車載數據并將其轉化為相應的相位管控命令發送給交通信號機。交通信號控制機主要控制路口的交通信號燈,其在本系統中主要負責處理執行特種車輛管控命令并把當前路口的燈色實時發送給特種車輛車載設備。
特種車輛優先控制系統使用前要設置特種車輛車載設備和終端設備,終端設備主要通過調試串口設置路口每個方向的虛擬標簽號、LORA模塊的通信頻段、路口各方向請求放行的燈組號以及信號機的唯一編號。同時,車載平板設備的特種車輛管控軟件要設置車載設備自身的ID號、所有管控路口每個方向的虛擬標簽號以及標簽的距離、信號機編號,等等。特種車輛管控軟件中設置的路口標簽號、信號機編號要與實際路口中特種車輛終端設備中的設置保持一致。虛擬標簽用來判斷待通行車輛來自哪個方向,需要亮起哪個方向的交通信號燈予以車輛放行。車載ID編號用于區分不同種類的特種車輛設備,避免不用設備之間誤收誤發。信號機編號也同樣可防止誤收來自其他路口的管控消息。
特種車輛優先控制系統的無線通信模塊采用433M的LORA無線模塊,為了避免特種車輛車載設備和特種車輛終端設備同時發送數據造成同頻干擾,本特種車輛系統的數據傳輸格式采用一問一答的形式;特種車輛車載設備為主,特種車輛終端設備為從;特種車輛車載設備每秒發送心跳信息,特種車輛終端設備收到心跳信息后返回應答信息,這樣可避免同時發送數據,從而避免帶來不必要的干擾。
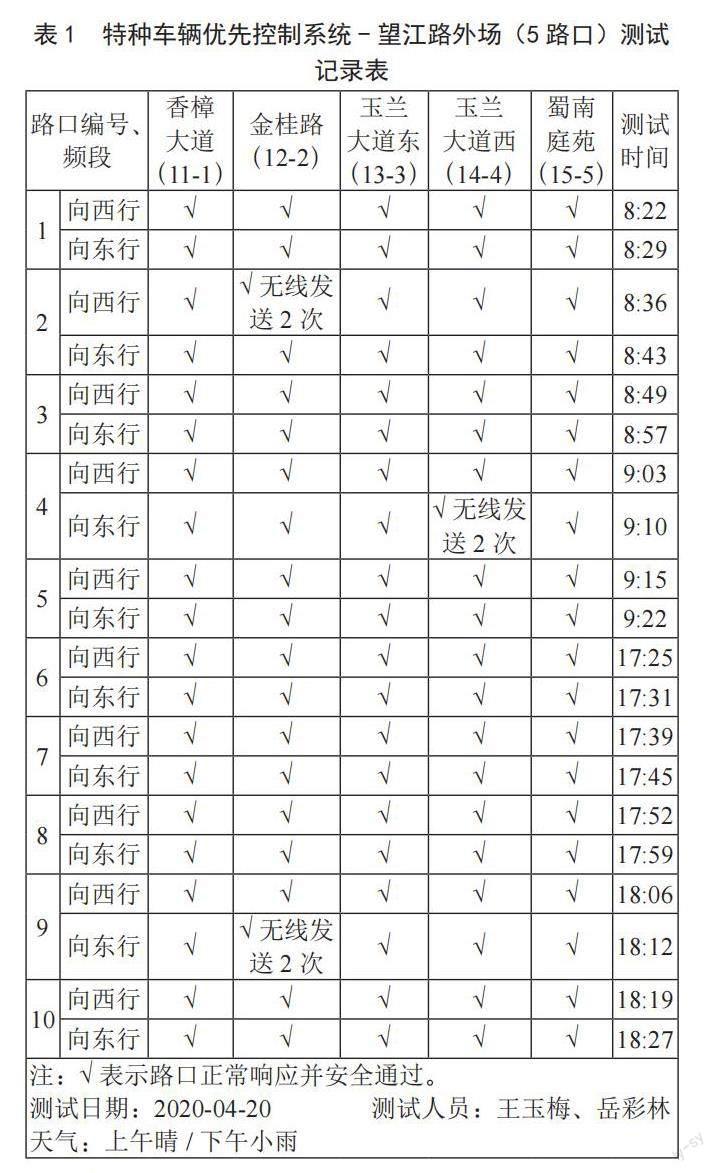
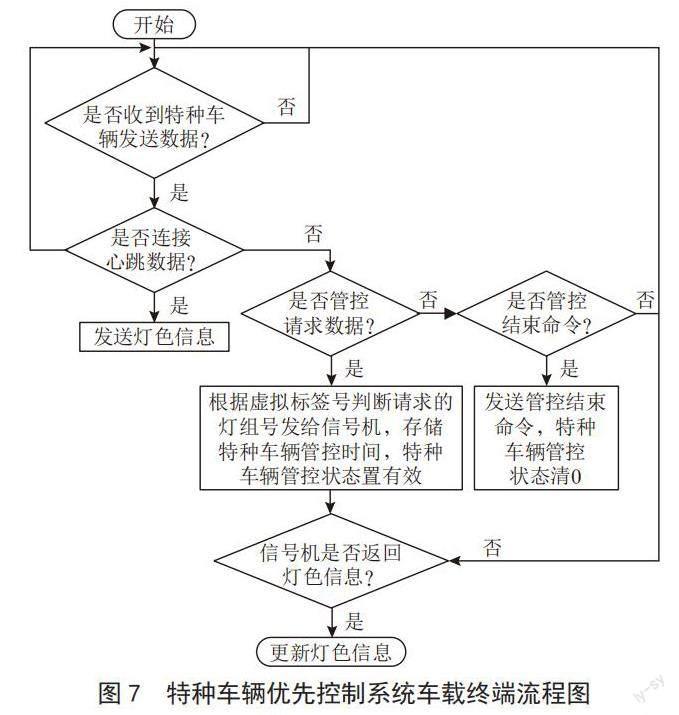
特種車輛優先控制系統硬件安裝設置好后,使用時打開特種車輛車載平板設備上的特種車輛管控軟件,如圖4所示,輸入特種車輛要行駛的目的地。特種車輛管控軟件會自動規劃行駛路線,如圖5所示,同時也開放接口供用戶手動調整線路。線路規劃成功后,特種車輛行駛到裝有特種車輛終端設備的路口時,在距離虛擬標簽點100 m的位置時特種車輛車載設備讀取該路口的配置信息,根據配置信息設置LORA無線通信頻率給路口的特種車輛終端設備發送連接信號;連接信號包含車載設備ID、路口信號機編號等,特種車輛終端設備接收到心跳信息后立即返回連接成功消息(包含車載設備ID、路口信號機編號等);連接成功后,特種車輛車載設備發心跳消息給特種車輛終端設備,到達設置的虛擬標簽點后,特種車輛車載設備發送虛擬標簽點號和請求的綠燈時間給特種車輛終端設備,特種車輛終端設備接收到消息后,判斷特種車輛請求的燈組號和時間信息并將它們發送給交通信號控制機,交通信號控制機接收到管控命令后,返回當前路口的燈色和當前階段剩余時間給特種車輛車載端并開始處理管控命令。特種車輛車載設備接收到當前路口的燈色后在界面上實時展示當前路口的燈色。交通信號控制機接收到管控命令運行過渡時間后開啟管控燈組放行車輛并實時把燈色傳送給特種車輛車載設備。特種車輛車載設備在管控路口會和當前路口的燈色保持一致。特種車輛車載設備會根據路口的交通狀況實時調整當前路口的管控時間。通過路口時特種車輛車載設備會發送結束管控命令,信號機收到結束管控命令后確保運行管控燈組的最短綠燈后切換到正常的運行狀態,特種車輛在該路口的優先管控結束。如果特種車輛終端設備沒有收到特種車輛車載端的結束命令會根據最后一次收到的管控時間運行結束后恢復正常運行狀態。特種車輛車載設備和終端設備的工作流程圖如圖6、圖7所示。
特種車輛優先控制系統還有配套的平臺,特種車輛車載設備會通過4G網絡實時上傳自己的位置到平臺,特種車輛管控軟件通過平臺獲取并實時顯示其他特種車輛的位置并通過不同的顏色來顯示其優先級,同時,特種車輛管控軟件在運行過程中會實時通過語音播報當前管控狀態和行駛方向的燈色,使駕駛員無須查看屏幕即可知曉當前的管控狀態,使特勤控制系統更加安全可靠。
2.2? 特種車輛優先控制系統效果分析
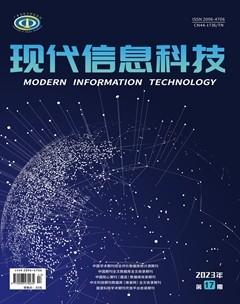
為了測試特種車輛優先的效果,我們選取合肥市望江西路5個路口(蜀南庭苑、玉蘭大道西、玉蘭大道東、金桂路、香樟大道)全程大概5 km進行了為期一個月的測試。為避免路口之間的同頻干擾,我們對5個路口選取的頻段均不相同;同時也測試了不同天氣、早晚高峰以及各種交通狀況下的優先效果;測試效果非常不錯;特種車輛幾乎每次都能實現優先快速通過;只有部分路口無線數據發送2次才會做出響應。測試內容如表1所示。
3? 結? 論
本文特種車輛優先控制系統從設計到研發都充分考慮了安全性和可靠性,并歷經長期的實驗室測試和實際路面測試。在測試中不斷地修改完善,最終達到了比較理想的通行狀態。本特種優先控制系統已經在相關城市運行,并取得了一定的成效。希望本特種車輛優先控制系統能夠為智慧城市的發展添翼助力。
參考文獻:
[1] 關富敏.基于雙定位模塊的超寬屏交互式電子白板系統設計 [D].廣州:廣東工業大學,2014.
[2] 楊昊佐.工業以太網EtherCAT從站設計 [D].西安:西安電子科技大學,2013.
[3] 龐世一,邢林林,楊振睿,等.基于深度學習的電網監控智能告警識別系統 [J].信息與電腦:理論版,2022,34(8):90-92.
[4] 錢志鴻,楊帆,周求湛.藍牙技術原理開發與應用 [M].北京:北京航空航天出版社,2006.
[5] 甘泉.LoRa物聯網通信技術 [M].北京:清華大學出版社,2021.
[6] 李明峰,馮寶紅,劉三枝.GPS定位技術及其應用 [M].北京:國防工業出版社,2006.
[7] 成衛,別一鳴,陳昱光.城市交通信號控制技術 [M].北京:科學出版社,2016.
作者簡介:王玉梅(1985—),女,漢族,安徽合肥人,初級職稱,本科,研究方向:機電工程。