電動(dòng)飛機(jī)飛行品質(zhì)快速評(píng)估與驗(yàn)證
2023-10-29 01:49:46楊鳳田周文雅
計(jì)算機(jī)仿真 2023年9期
關(guān)鍵詞:飛機(jī)
張 磊,楊鳳田,周文雅,黃 俊
(1. 遼寧通用航空研究院,遼寧 沈陽 110136;2. 沈陽航空航天大學(xué)遼寧省通用航空重點(diǎn)實(shí)驗(yàn)室,遼寧 沈陽110136;3. 沈陽飛機(jī)設(shè)計(jì)研究所,遼寧 沈陽110135;4. 大連理工大學(xué)航空航天學(xué)院 遼寧 大連116024;5. 北京航空航天大學(xué)航空科學(xué)與工程學(xué)院 北京100083)
1 引言
隨著中國采取更加有力的政策和措施,減少二氧化碳排放,逐步實(shí)現(xiàn)碳中和,新能源飛機(jī)的發(fā)展進(jìn)入了快車道[1,2]。區(qū)別于采用傳統(tǒng)燃油發(fā)動(dòng)機(jī)的飛機(jī),電動(dòng)飛機(jī)采用電機(jī)提供推力,電池提供能源,具有綠色環(huán)保的優(yōu)點(diǎn)[3-5]。在飛行器初步設(shè)計(jì)階段,通常需要快速計(jì)算出飛行器氣動(dòng)參數(shù),進(jìn)而對(duì)飛行器穩(wěn)定性和操縱性進(jìn)行快速評(píng)估[6],并為飛行控制律設(shè)計(jì)提供基礎(chǔ)數(shù)據(jù)。因此,各種飛行器氣動(dòng)計(jì)算和仿真軟件被開發(fā)出來。其中較為常用的氣動(dòng)力估算軟件包括DATCOM軟件[7-9]。盡管飛行器氣動(dòng)參數(shù)計(jì)算和仿真軟件功能越來越強(qiáng)大,計(jì)算能力越來越強(qiáng),但飛行器風(fēng)洞試驗(yàn)仍然是不可或缺的重要環(huán)節(jié)[10],尤其是在需要精確氣動(dòng)參數(shù)數(shù)據(jù)的詳細(xì)設(shè)計(jì)階段[11]。盡管采用氣動(dòng)計(jì)算仿真軟件和風(fēng)洞試驗(yàn)方法,可以得到較為準(zhǔn)確的飛機(jī)氣動(dòng)參數(shù)和飛行性能,但飛行試驗(yàn)仍然是不可或缺的驗(yàn)證手段[12-14]。
本文以沈陽航空航天大學(xué)和遼寧通用航空研究院研制的RX1E-A電動(dòng)飛機(jī)為基準(zhǔn)模型,采用DATCOM氣動(dòng)估算軟件計(jì)算其氣動(dòng)參數(shù)和飛行品質(zhì)。再采用RX1E-A飛機(jī)縮比驗(yàn)證機(jī)在中航工業(yè)氣動(dòng)院FL-8風(fēng)洞[15]所做風(fēng)洞試驗(yàn)氣動(dòng)數(shù)據(jù),計(jì)算了該型飛機(jī)飛行品質(zhì),進(jìn)而驗(yàn)證DATCOM計(jì)算的氣動(dòng)參數(shù)和飛行品質(zhì)的準(zhǔn)確程度。最后對(duì)RX1E-A飛機(jī)進(jìn)行飛行試驗(yàn),采集飛機(jī)舵偏產(chǎn)生的姿態(tài)角變化曲線,并根據(jù)飛行員評(píng)價(jià),以此驗(yàn)證DATCOM計(jì)算的操穩(wěn)特性的準(zhǔn)確程度。
RX1E-A電動(dòng)飛機(jī)為上單翼常規(guī)布局螺旋槳電動(dòng)力飛機(jī),RX1E-A電動(dòng)飛機(jī)的基本參數(shù)如表1所示。
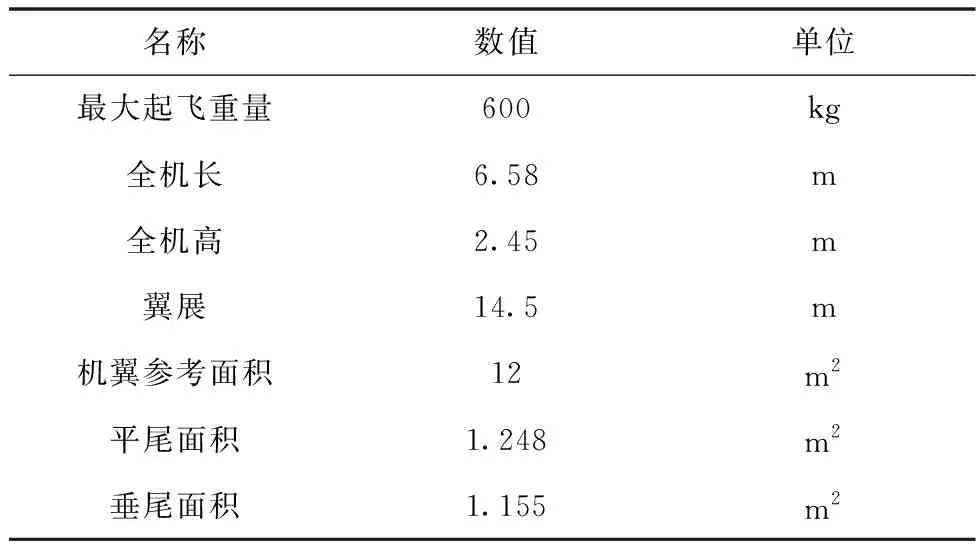
表1 RX1E-A電動(dòng)飛機(jī)基本參數(shù)
2 電動(dòng)飛機(jī)運(yùn)動(dòng)建模
本文著重推導(dǎo)繞質(zhì)心轉(zhuǎn)動(dòng)動(dòng)力學(xué)方程[16]。在地面坐標(biāo)系中,有下式

(1)
式中:∑M為飛機(jī)所受外合力矩,L為飛機(jī)動(dòng)量矩。
則有下式

(2)
將動(dòng)量矩L寫成下式
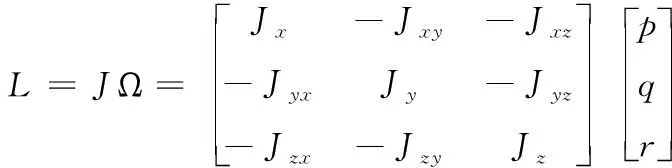
(3)
式中:J為飛機(jī)慣性張量,Jx、Jy和Jz為飛機(jī)對(duì)機(jī)體坐標(biāo)系各軸的轉(zhuǎn)動(dòng)慣量,Jxy、Jyx、Jxz、Jzx、Jyz和Jzy為飛機(jī)對(duì)機(jī)體坐標(biāo)系各軸的慣量積。
本文飛機(jī)建模時(shí),沒有按照常規(guī)的飛機(jī)為面對(duì)稱飛行器的假設(shè),而是把飛機(jī)出現(xiàn)機(jī)體不對(duì)稱、質(zhì)量分布不均勻的情況考慮進(jìn)來。假設(shè)飛機(jī)慣性張量J在某一段時(shí)間內(nèi)為時(shí)不變的常量,(2)式第一項(xiàng)可以可寫成
(4)
且,(2)式第二項(xiàng)可以可寫成
Ω×L=S(Ω)JΩ
(5)
其中:S(Ω)定義如下
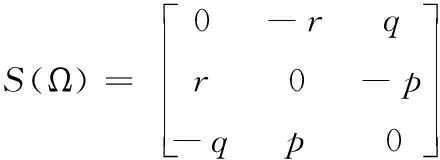
(6)
式中:Ω定義見(7)式。
Ω=pib+qjb+rkb
(7)
式中:p為滾轉(zhuǎn)角速度,q為俯仰角速度,r為偏航角速度。
將外合力矩∑M在機(jī)體坐標(biāo)系中分解,有
(8)
將(4)式、(5)式代入(1)式,可得
(9)
對(duì)(9)式兩邊慣性張量J求逆,則可得到在機(jī)體坐標(biāo)系中建立的基于不對(duì)稱飛機(jī)慣性張量的矩陣形式繞質(zhì)心轉(zhuǎn)動(dòng)動(dòng)力學(xué)方程
(10)
3 風(fēng)洞試驗(yàn)對(duì)DATCOM計(jì)算氣動(dòng)參數(shù)驗(yàn)證
DATCOM氣動(dòng)力工程估算軟件是為快速計(jì)算飛行器氣動(dòng)參數(shù)而由美國開發(fā)的,對(duì)于常規(guī)構(gòu)型飛行器均能得到比較理想的氣動(dòng)數(shù)據(jù)。除此以外,DATCOM程序還可以計(jì)算高超聲速飛行器氣動(dòng)舵效參數(shù),程序計(jì)算時(shí)的限制條件是迎角需在0°到20°范圍內(nèi),馬赫數(shù)大于5;DATCOM程序還可以計(jì)算橫向射流控制效果(Transverse-jet Control Effectiveness),程序計(jì)算時(shí)要求馬赫數(shù)范圍為2馬赫到20馬赫。
將DATCOM軟件計(jì)算的RX1E-A飛機(jī)氣動(dòng)參數(shù)與風(fēng)洞試驗(yàn)數(shù)據(jù)進(jìn)行對(duì)比,升力系數(shù)隨迎角變化曲線如圖1所示。
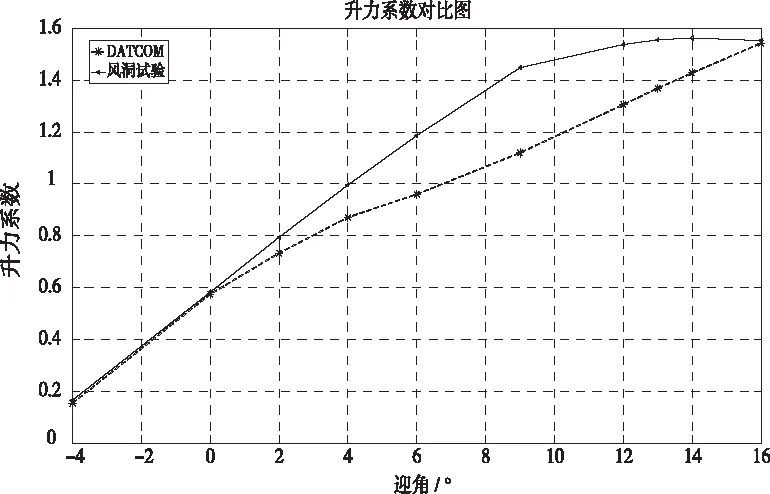
圖1 升力系數(shù)隨迎角變化曲線
DATCOM阻力系數(shù)與風(fēng)洞試驗(yàn)數(shù)據(jù)對(duì)比如圖2所示。
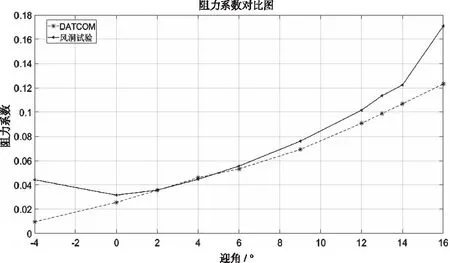
圖2 DATCOM阻力系數(shù)與風(fēng)洞試驗(yàn)數(shù)據(jù)對(duì)比圖
俯仰力矩系數(shù)隨迎角變化曲線如圖3所示。
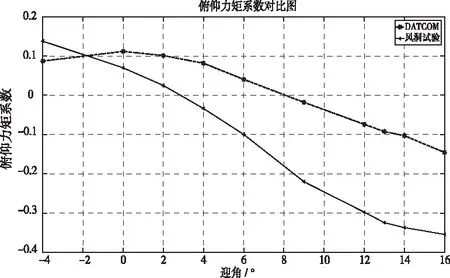
圖3 俯仰力矩系數(shù)隨迎角變化曲線
滾轉(zhuǎn)力矩系數(shù)隨側(cè)滑角變化曲線如圖4所示。
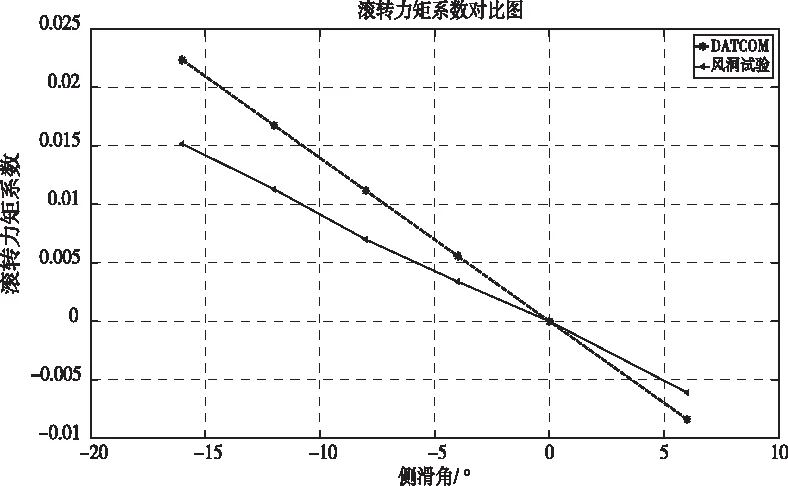
圖4 滾轉(zhuǎn)力矩系數(shù)隨側(cè)滑角變化曲線
副翼產(chǎn)生的滾轉(zhuǎn)力矩系數(shù)隨側(cè)滑角變化曲線如圖5所示。
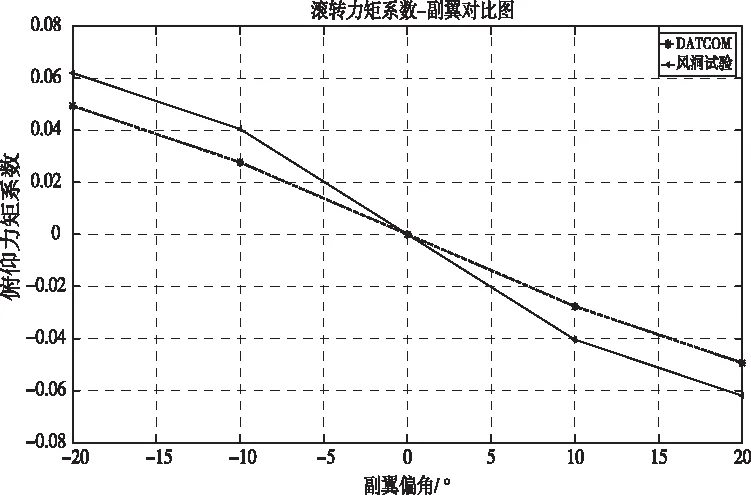
圖5 副翼產(chǎn)生的滾轉(zhuǎn)力矩系數(shù)隨側(cè)滑角變化曲線
升降舵產(chǎn)生的俯仰力矩系數(shù)隨迎角變化曲線如圖6所示。
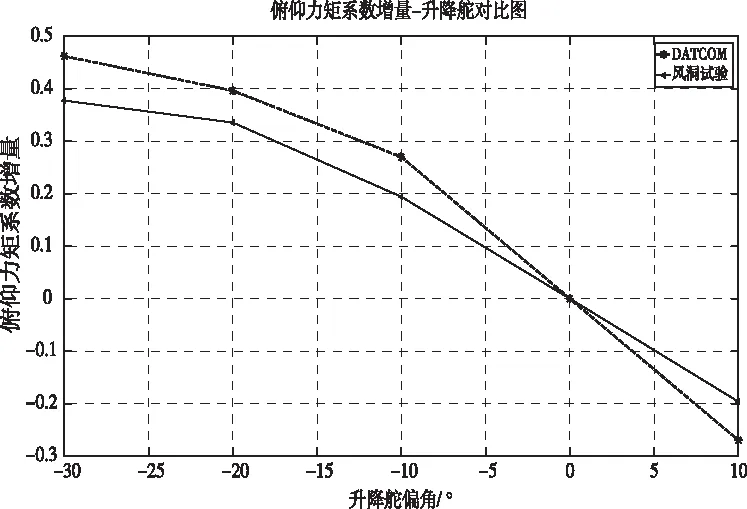
圖6 升降舵產(chǎn)生的俯仰力矩系數(shù)隨迎角變化曲線
從圖1可知:DATCOM計(jì)算的升力系數(shù)在迎角處于-4°到1°范圍內(nèi)與風(fēng)洞試驗(yàn)數(shù)據(jù)相近,在迎角處于1°到15°范圍內(nèi)比風(fēng)洞試驗(yàn)數(shù)據(jù)小,在迎角為9°時(shí)兩者差值最大,DATCOM升力系數(shù)為風(fēng)洞數(shù)據(jù)的77%。
從圖2可知,DATCOM修正后的阻力系數(shù)與風(fēng)洞試驗(yàn)數(shù)據(jù)接近,尤其是0度到8度迎角范圍內(nèi)幾乎重合。
從圖3可知:DATCOM俯仰力矩系數(shù)在迎角處于-4°到0°范圍時(shí)相差不大,在0°到16°范圍內(nèi)下降速率大約是風(fēng)洞試驗(yàn)數(shù)據(jù)下降速率的一半,雖然此時(shí)DATCOM升力系數(shù)比風(fēng)洞試驗(yàn)小一些,但筆者認(rèn)為主要原因還是由于DATCOM升力作用點(diǎn)隨迎角增加而后移的速度較小。
從圖4可知:DATCOM滾轉(zhuǎn)力矩系數(shù)隨側(cè)滑角變化速率為風(fēng)洞試驗(yàn)數(shù)據(jù)1.5倍。
從圖5可知:DATCOM計(jì)算得到的副翼偏轉(zhuǎn)產(chǎn)生的滾轉(zhuǎn)力矩系數(shù)約為風(fēng)洞數(shù)據(jù)的77%。
從圖6可知:DATCOM計(jì)算得到的升降舵偏轉(zhuǎn)產(chǎn)生的俯仰力矩系數(shù)增量約為風(fēng)洞數(shù)據(jù)的1.3倍。
4 風(fēng)洞試驗(yàn)數(shù)據(jù)對(duì)DATCOM計(jì)算飛行品質(zhì)驗(yàn)證
飛行品質(zhì)對(duì)保證飛機(jī)飛行任務(wù)性能和飛行安全起到關(guān)鍵作用。其中飛機(jī)本體飛行品質(zhì)是飛機(jī)操縱和飛行控制的基礎(chǔ)。一架飛機(jī)在設(shè)計(jì)時(shí)需要關(guān)注飛行員操縱起來的感受,是否安全、有效和好飛。
GJB185-86《有人駕駛飛機(jī)(固定翼)飛行品質(zhì)》對(duì)我國軍用有人駕駛飛機(jī)在空中和地面的飛行和操縱品質(zhì)提出了具體要求,用于保證完成任務(wù)和飛行安全。
電動(dòng)飛機(jī)本體飛行品質(zhì)基本要求和油動(dòng)飛機(jī)基本一致,但電動(dòng)飛機(jī)相比于油動(dòng)飛機(jī)有如下特點(diǎn):
1)電動(dòng)飛機(jī)使用動(dòng)力電池作為能源,在電動(dòng)飛機(jī)整個(gè)飛行階段,動(dòng)力電池重量幾乎不發(fā)生改變,因此電動(dòng)飛機(jī)在整個(gè)飛行階段,重量重心和轉(zhuǎn)動(dòng)慣量都不發(fā)生改變。
2)電動(dòng)飛機(jī)依靠電機(jī)提供推力,電機(jī)在運(yùn)行時(shí)不產(chǎn)生二氧化碳等有害氣體,并且噪聲很低,因此電動(dòng)飛機(jī)具有對(duì)環(huán)境友好的特點(diǎn)。
3)電動(dòng)飛機(jī)電機(jī)工作效率幾乎不隨飛行高度變化,飛行高度適應(yīng)性較好。
4)由于現(xiàn)階段動(dòng)力電池能量密度沒有燃油高,因此電動(dòng)飛機(jī)通常設(shè)計(jì)成大展弦比,因此電動(dòng)飛機(jī)的穩(wěn)定性通常較好,但往往會(huì)犧牲一部分操縱性。
由于RX1E-A電動(dòng)飛機(jī)重量不超過4500kg,最大法向過載不超過4.5,因此本文按照輕小類(QX)飛機(jī),針對(duì)航向階段(B種)整理其飛行品質(zhì)要求,對(duì)應(yīng)RX1E-A電動(dòng)飛機(jī)的飛行品質(zhì)標(biāo)準(zhǔn)如表2所示。

表2 RX1E-A電動(dòng)飛機(jī)選用飛行品質(zhì)標(biāo)準(zhǔn)
基于DATCOM計(jì)算氣動(dòng)數(shù)據(jù)進(jìn)行RX1E-A飛機(jī)飛行品質(zhì)分析,并用基于風(fēng)洞試驗(yàn)數(shù)據(jù)進(jìn)行的RX1E-A飛機(jī)飛行品質(zhì)分析結(jié)果對(duì)其進(jìn)行驗(yàn)證,具體如表3所示。
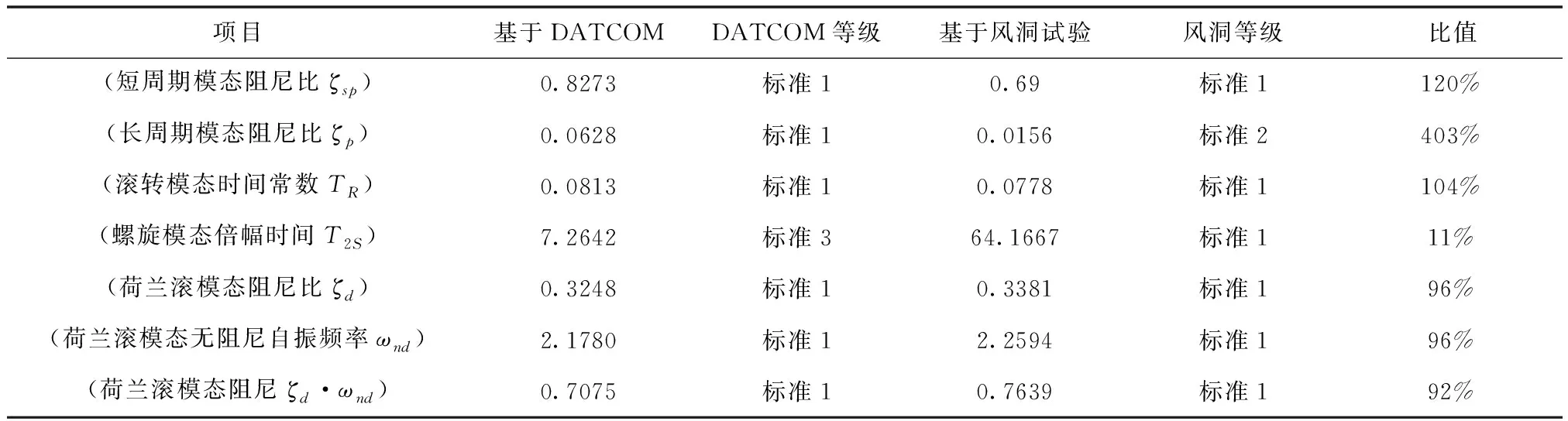
表3 基于 DATCOM與風(fēng)洞試驗(yàn)飛行品質(zhì)對(duì)比
從表3可知,基于DATCOM計(jì)算數(shù)據(jù)的RX1E-A電動(dòng)飛機(jī)的飛行品質(zhì),除了螺旋模態(tài)滿足標(biāo)準(zhǔn)3要求,其它模態(tài)都滿足標(biāo)準(zhǔn)1要求。基于風(fēng)洞試驗(yàn)數(shù)據(jù)的RX1E-A電動(dòng)飛機(jī)進(jìn)行飛行品質(zhì),除了長(zhǎng)周期模態(tài)滿足標(biāo)準(zhǔn)2要求,其它模態(tài)都滿足標(biāo)準(zhǔn)1要求。基于DATCOM計(jì)算得到的長(zhǎng)周期模態(tài)阻尼比ζsp是基于風(fēng)洞試驗(yàn)得到的數(shù)據(jù)403%,基于DATCOM得到的螺旋模態(tài)倍幅時(shí)間T2S是基于風(fēng)洞試驗(yàn)得到的數(shù)據(jù)的11%,其它數(shù)據(jù)都近似相等。
RX1E-A電動(dòng)飛機(jī)滾轉(zhuǎn)操縱性能也是按照輕小類(QX)飛機(jī)航向階段(B種)要求進(jìn)行判定,如表4所示。

表4 RX1E-A電動(dòng)飛機(jī)滾轉(zhuǎn)操縱性能要求
基于風(fēng)洞試驗(yàn)數(shù)據(jù),RX1E-A飛機(jī)副翼給定-1°階躍輸入和-1°舵偏角持續(xù)1s的短時(shí)輸入對(duì)滾轉(zhuǎn)角作用曲線如圖7所示。其中階躍響應(yīng)為一條斜線,滾轉(zhuǎn)角隨時(shí)間線性增加,增加速率為2°/s,短時(shí)舵偏響應(yīng)在開始到1s時(shí)間段線性增加,增加速率與階躍響應(yīng)相同,1s后響應(yīng)曲線近似為一條水平線,但略有上升,俯仰角振蕩周期約為20s。根據(jù)階躍響應(yīng)可知,副翼偏轉(zhuǎn)20°時(shí),滾轉(zhuǎn)角從30°變化到-30°需要1.5s時(shí)間。滿足輕小類(QX)飛機(jī)航向階段(B種)滾轉(zhuǎn)操縱性能要求中60度滾轉(zhuǎn)操縱性能標(biāo)準(zhǔn)1。
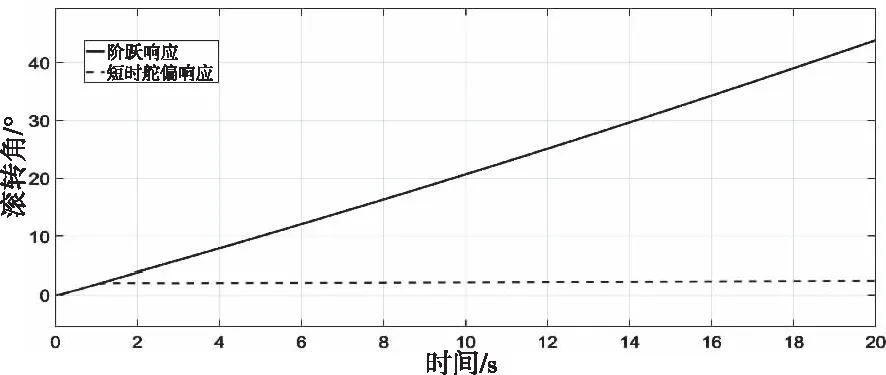
圖7 基于風(fēng)洞試驗(yàn)數(shù)據(jù)RX1E-A飛機(jī)-1°副翼偏角的階躍響應(yīng)和擾動(dòng)響應(yīng)
基于DATCOM數(shù)據(jù),RX1E-A飛機(jī)副翼給定-1°階躍輸入和-1°舵偏角持續(xù)1s的短時(shí)輸入對(duì)滾轉(zhuǎn)角作用曲線如圖8所示。其中階躍響應(yīng)在0s到5s時(shí)間段近似為一條斜線,滾轉(zhuǎn)角隨時(shí)間線性增加,增加速率為1.1°/s,短時(shí)舵偏響應(yīng)在開始到1s時(shí)間段線性增加,增加速率與階躍響應(yīng)相同,1s后響應(yīng)曲線近似為一條水平線,但略有下降,俯仰角振蕩周期約為20s。根據(jù)階躍響應(yīng)可知,副翼偏轉(zhuǎn)20°時(shí),滾轉(zhuǎn)角從30°變化到-30°需要2.7s時(shí)間。滿足輕小類(QX)飛機(jī)航向階段(B種)滾轉(zhuǎn)操縱性能要求中60度滾轉(zhuǎn)操縱性能標(biāo)準(zhǔn)3。
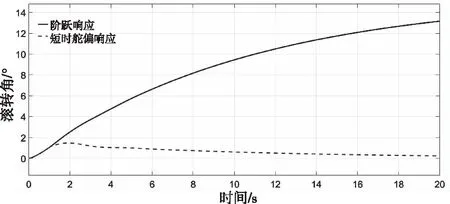
圖8 基于DATCOM RX1E-A飛機(jī)-1°副翼偏角的階躍響應(yīng)和擾動(dòng)響應(yīng)
將基于DATCOM數(shù)據(jù)和風(fēng)洞試驗(yàn)數(shù)據(jù)得到的滾轉(zhuǎn)操縱性能參數(shù)進(jìn)行對(duì)比驗(yàn)證,如表5所示。可知基于DATCOM數(shù)據(jù)的60°滾轉(zhuǎn)操縱時(shí)間是基于風(fēng)洞試驗(yàn)數(shù)據(jù)得到的參數(shù)的180%。

表5 基于 DATCOM與風(fēng)洞試驗(yàn)滾轉(zhuǎn)操縱參數(shù)對(duì)比
基于DATCOM計(jì)算氣動(dòng)數(shù)據(jù),RX1E-A飛機(jī)升降舵給定-5°階躍輸入和-5°舵偏角持續(xù)1s的擾動(dòng)輸入對(duì)俯仰角作用曲線如圖9所示。其中俯仰角階躍響應(yīng)經(jīng)過300s仍振蕩衰減,最終收斂至15°附近。迎角階躍響應(yīng)在開始后的1s快速變化,然后隨著俯仰角的振蕩而輕微振蕩。俯仰角擾動(dòng)響應(yīng)經(jīng)過200s振蕩衰減,最終收斂至0°俯仰角。迎角擾動(dòng)響應(yīng)在開始后的2s快速振蕩后收斂至0°附近,后期隨著俯仰角的振蕩而輕微振蕩。
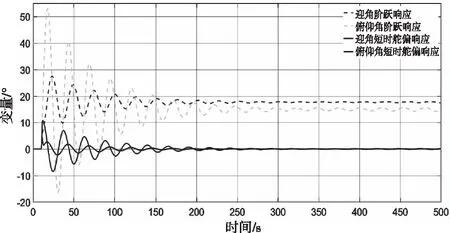
圖9 基于DATCOM計(jì)算數(shù)據(jù)RX1E-A飛機(jī)-1°升降舵偏角的階躍響應(yīng)和擾動(dòng)響應(yīng)
基于風(fēng)洞試驗(yàn)數(shù)據(jù),RX1E-A飛機(jī)升降舵給定-5°階躍輸入和-5°舵偏角持續(xù)1s的擾動(dòng)輸入對(duì)俯仰角作用曲線如圖10所示。其中俯仰角階躍響應(yīng)經(jīng)過500s后仍然在振蕩衰減,經(jīng)過約1000s最終收斂至5°附近,迎角階躍響應(yīng)在開始后的1s快速變化,然后隨著俯仰角的振蕩而輕微振蕩。俯仰角擾動(dòng)響應(yīng)經(jīng)過500s仍然在振蕩衰減,經(jīng)過約700s最終收斂至0°俯仰角,迎角擾動(dòng)響應(yīng)在開始后的2.2s快速振蕩后收斂至0°附近,后期隨著俯仰角的振蕩而輕微振蕩。可知本機(jī)俯仰穩(wěn)定性收斂穩(wěn)定,滿足正常飛行操縱要求。

圖10 基于風(fēng)洞試驗(yàn)數(shù)據(jù)RX1E-A飛機(jī)-1°升降舵偏角階躍響應(yīng)和擾動(dòng)響應(yīng)
從圖9到圖10可以看出,DATCOM計(jì)算數(shù)據(jù)的升降舵偏角階躍輸入產(chǎn)生的俯仰角響應(yīng)在經(jīng)過振蕩穩(wěn)定后是風(fēng)洞試驗(yàn)數(shù)據(jù)得到的俯仰角的3倍。
5 飛行試驗(yàn)對(duì)DATCOM計(jì)算飛行品質(zhì)驗(yàn)證
RX1E-A飛機(jī)進(jìn)行飛行試驗(yàn)照片如圖11所示。

圖11 RX1E-A電動(dòng)飛機(jī)飛行試驗(yàn)照片
試飛時(shí),在RX1E-A飛機(jī)安裝飛控采集系統(tǒng),采集實(shí)際飛行中升降舵偏角、飛機(jī)俯仰角和飛機(jī)迎角,其中飛行試驗(yàn)中升降舵偏轉(zhuǎn)作用產(chǎn)生的飛機(jī)俯仰角和迎角變化的曲線如圖12所示。
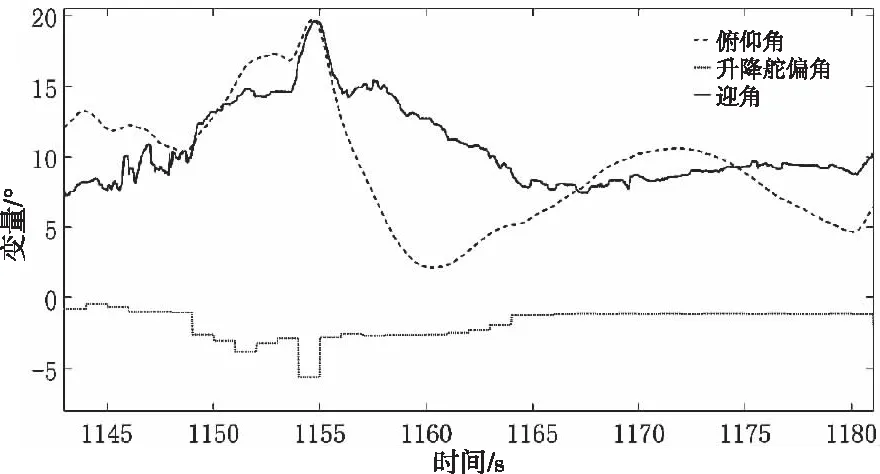
圖12 RX1E-A飛機(jī)飛行試驗(yàn)升降舵偏轉(zhuǎn)產(chǎn)生的飛機(jī)俯仰角和迎角變化曲線
圖12中,橫軸為飛機(jī)飛行時(shí)間,從本次飛行試驗(yàn)計(jì)時(shí)的第1150s開始,給升降舵一個(gè)不超過-5°偏角的偏轉(zhuǎn),可以看到飛機(jī)迎角從不到10°迅速上升到接近20°,經(jīng)過快速的振蕩后逐漸平穩(wěn),在升降舵偏角回中時(shí),飛機(jī)迎角也迅速穩(wěn)定在10°附近。飛機(jī)俯仰角也從10°附近上升到接近20°,然后緩慢振蕩,在升降舵在1165s回中時(shí),俯仰角仍然在緩慢振蕩,在1180s時(shí)俯仰角仍然沒有停止振蕩,只是振蕩收斂,幅度越來越小,振蕩周期約為17s。本次飛行試驗(yàn)中升降舵偏轉(zhuǎn)產(chǎn)生的迎角變化與圖10基于風(fēng)洞試驗(yàn)數(shù)據(jù)和圖9中基于DATCOM數(shù)據(jù)的MATLAB仿真的迎角變化趨勢(shì)一致,迎角變化屬于縱向短周期運(yùn)動(dòng),由于具有較大的靜穩(wěn)定恢復(fù)力矩,快速振蕩后馬上(幾秒以內(nèi))就能穩(wěn)定;飛行試驗(yàn)中升降舵偏轉(zhuǎn)產(chǎn)生的俯仰角與圖10基于風(fēng)洞試驗(yàn)數(shù)據(jù)和圖9中基于DATCOM數(shù)據(jù)的MATLAB仿真的俯仰角變化趨勢(shì)一致,俯仰角變化屬于縱向長(zhǎng)周期運(yùn)動(dòng),振蕩雖收斂但緩慢,在升降舵回中后仍然需要較長(zhǎng)時(shí)間(數(shù)十秒到幾百秒)恢復(fù)到穩(wěn)態(tài),這個(gè)過程可以看成飛機(jī)勢(shì)能與動(dòng)能相互轉(zhuǎn)化過程(假設(shè)飛機(jī)推力與阻力相等條件下),在這個(gè)過程中迎角幾乎不發(fā)生變化,主要是飛機(jī)速度和高度的緩慢變化,由于飛機(jī)質(zhì)量較大,慣性較大,而起恢復(fù)和阻尼作用的氣動(dòng)力相對(duì)較小,因此恢復(fù)過程非常緩慢。
在RX1E-A飛機(jī)進(jìn)行飛行驗(yàn)證中,根據(jù)飛行員反饋,該機(jī)在給定短時(shí)副翼偏轉(zhuǎn)并回中后,滾轉(zhuǎn)角先增加,然后穩(wěn)定在一個(gè)角度,并緩慢增加,與圖7基于風(fēng)洞試驗(yàn)數(shù)據(jù)的MATLAB仿真的變化趨勢(shì)一致,但不同于圖8中基于DATCOM數(shù)據(jù)的MATLAB仿真曲線。
6 結(jié)論
本文采用DATCOM氣動(dòng)計(jì)算軟件,快速計(jì)算了RX1E-A飛機(jī)氣動(dòng)參數(shù)和飛行品質(zhì),并采用風(fēng)洞試驗(yàn)數(shù)據(jù)和飛行試驗(yàn)數(shù)據(jù)對(duì)其進(jìn)行驗(yàn)證,得到以下結(jié)論:
1)使用DATCOM計(jì)算飛機(jī)氣動(dòng)參數(shù)與風(fēng)洞試驗(yàn)數(shù)據(jù)相比具有一定偏差,文中所列舉各氣動(dòng)參數(shù)偏差在50%范圍內(nèi),但基本滿足初步設(shè)計(jì)階段的需求。
2)基于DATCOM計(jì)算數(shù)據(jù)得到的飛機(jī)飛行品質(zhì)與基于風(fēng)洞試驗(yàn)數(shù)據(jù)得到飛行品質(zhì),在長(zhǎng)周期模態(tài)ζp和螺旋模態(tài)T2S有較大偏差,在其它模態(tài)偏差很小,滾轉(zhuǎn)操縱參數(shù)偏差可達(dá)80%。
3)由DATCOM計(jì)算仿真得到的升降舵階躍響應(yīng)和擾動(dòng)響應(yīng)與飛行試驗(yàn)采集實(shí)際升降舵偏對(duì)俯仰角和迎角影響趨勢(shì)相近。
4)在飛機(jī)初步設(shè)計(jì)階段,DATCOM軟件具有快速高效的評(píng)估飛機(jī)氣動(dòng)參數(shù)和飛行品質(zhì)的優(yōu)點(diǎn),盡量部分參數(shù)與風(fēng)洞試驗(yàn)和飛行試驗(yàn)所得數(shù)據(jù)有一定偏差,但DATCOM快速估算方法仍有一定價(jià)值。
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
