沖擊載荷作用下高速機(jī)械傳動(dòng)誤差測(cè)試仿真
2023-10-29 01:46:40周慧珍王光泰
計(jì)算機(jī)仿真 2023年9期
周慧珍,王光泰
(1. 山西晉中理工學(xué)院智能制造與車輛學(xué)院,山西 晉中 030600;2. 山西大學(xué),山西 太原 237016)
1 引言
低速運(yùn)轉(zhuǎn)下的機(jī)械設(shè)備,測(cè)試其傳動(dòng)誤差只需考慮周節(jié)誤差和齒形的幾何精度測(cè)量即可,無(wú)需考慮其它振動(dòng)因素。而在高速運(yùn)轉(zhuǎn)下的機(jī)械設(shè)備,傳動(dòng)誤差的出現(xiàn)極易使設(shè)備產(chǎn)生新的振動(dòng)和噪聲,如果不及時(shí)檢測(cè)與處理,很有可能導(dǎo)致整條生產(chǎn)線停止工作。
為此,文獻(xiàn)[1]學(xué)者利用雙邊加載模型對(duì)汽車的驅(qū)動(dòng)橋機(jī)械展開了傳動(dòng)誤差的測(cè)試,利用采集模型獲取汽車驅(qū)動(dòng)橋的雙邊加載特征值,搭建臺(tái)架測(cè)試裝置;對(duì)獲取到的雙邊加載特征值進(jìn)行傳動(dòng)誤差分析和驗(yàn)證,根據(jù)誤差的大小提出相應(yīng)的控制策略。雙邊加載特征值的獲取是通過(guò)角位移傳感器實(shí)現(xiàn)的,汽車驅(qū)動(dòng)橋中需放置3臺(tái)傳感器,以便精準(zhǔn)獲取汽車角位移信號(hào),通過(guò)上位機(jī)軟件分析計(jì)算信號(hào)誤差。該方法在不同轉(zhuǎn)矩和轉(zhuǎn)速下,都得到了具體的傳動(dòng)誤差,具有良好的可行性,但是對(duì)信號(hào)的處理速度較慢,使得整體方法實(shí)時(shí)性較差;文獻(xiàn)[2]利用高精度編碼器,構(gòu)建了針對(duì)工業(yè)機(jī)器人關(guān)節(jié)的高速機(jī)械測(cè)試平臺(tái)。通過(guò)LabVIEW軟件構(gòu)建測(cè)試臺(tái),根據(jù)需求不同編寫了相應(yīng)的數(shù)據(jù)采集模塊、處理模塊以及處理程序模塊等。方法在實(shí)際測(cè)試中可以獲取到直觀的傳動(dòng)誤差數(shù)據(jù),最終結(jié)果與實(shí)際結(jié)果之間相差較大。
綜合分析上述不足,本文在考慮沖擊載荷作用前提下提出一種高速機(jī)械傳動(dòng)誤差測(cè)試方法,以提高高速機(jī)械的抗干擾性,通過(guò)計(jì)算機(jī)械傳動(dòng)誤差,將算法與模型結(jié)合在一起,完成對(duì)機(jī)械的傳動(dòng)誤差實(shí)時(shí)測(cè)試。仿真中,運(yùn)用本文構(gòu)建的傳動(dòng)誤差測(cè)試模型進(jìn)行精度自檢,結(jié)果符合一級(jí)蝸輪副測(cè)試要求。與其它方法的對(duì)比實(shí)驗(yàn),也驗(yàn)證了本文方法具有良好的穩(wěn)定性和可靠性,具有應(yīng)用在現(xiàn)實(shí)中的價(jià)值。
2 沖擊載荷作用下高速機(jī)械傳動(dòng)誤差測(cè)試模型
構(gòu)建沖擊載荷作用下的高速機(jī)械傳動(dòng)誤差測(cè)試模型,對(duì)誤差測(cè)試需求進(jìn)行分析和細(xì)化,本文將測(cè)試模型分為上、下位機(jī)兩部分,二者之間通過(guò)RS2232接口實(shí)現(xiàn)通信。
2.1 上位機(jī)模塊
上位機(jī)模塊是在Windows8系統(tǒng)上實(shí)現(xiàn)的,可通過(guò)通信接口與模型中下位機(jī)間進(jìn)行通信,將數(shù)據(jù)采集指令、參數(shù)設(shè)定[3]以及數(shù)據(jù)處理結(jié)果等信息傳送給下位機(jī)模塊。上位機(jī)模塊由VC++6.0語(yǔ)言完成編寫,可由MScomm控件實(shí)現(xiàn)對(duì)上、下位機(jī)的讀寫管理。
2.2 下位機(jī)模塊
下位機(jī)模塊主要由數(shù)據(jù)采集和數(shù)據(jù)讀取兩個(gè)子模塊構(gòu)成,在整個(gè)模型中的作用是進(jìn)行數(shù)據(jù)的采集、讀取、處理以及發(fā)送。
2.2.1 數(shù)據(jù)采集
數(shù)據(jù)采集模塊本文選擇的是ALTERA公司設(shè)計(jì)的FPGA(現(xiàn)場(chǎng)可編程邏輯門陣列),由Quartus II進(jìn)行程序編寫。FPGA的主要作用是通過(guò)設(shè)定合適的傳感器參數(shù)[4],獲取滿足計(jì)數(shù)測(cè)量法所需要的計(jì)數(shù)控制信號(hào)和計(jì)數(shù)脈沖信號(hào),最后將采集到的信號(hào)傳送至模型單片機(jī)模塊中。
FPGA模塊分為5個(gè)子模塊,分別是:計(jì)數(shù)器控制產(chǎn)生信號(hào)模塊、計(jì)數(shù)器模塊、可調(diào)節(jié)時(shí)鐘模塊、光柵原始信號(hào)智能分頻模塊以及時(shí)序狀態(tài)機(jī)。計(jì)數(shù)器控制產(chǎn)生信號(hào)模塊是整個(gè)模型中最關(guān)鍵的一部分,所有的控制信號(hào)都由該模塊生成;計(jì)數(shù)器模塊的功能是將模型控制在自動(dòng)重裝初值的工作模式下;可調(diào)節(jié)時(shí)鐘模塊的主要功能,是滿足模型在不同轉(zhuǎn)速下的測(cè)試要求[5]。本文只考慮高速測(cè)量場(chǎng)合下的情況,該模塊可調(diào)高計(jì)數(shù)時(shí)鐘的頻率,以此提高模型整體的分辨率;光柵原始信號(hào)智能分頻模塊可適應(yīng)不同采樣點(diǎn)數(shù),主要有兩個(gè)功能:一是為適應(yīng)采樣需求,可隨時(shí)調(diào)整采樣周期,以及周期內(nèi)的采樣點(diǎn)數(shù);二是對(duì)原始信號(hào)分頻,為模型處理電路問(wèn)題提供更加充裕的時(shí)間;時(shí)序狀態(tài)機(jī)則是幫助模型適應(yīng)不同場(chǎng)合,及時(shí)調(diào)整測(cè)量參數(shù),增加了模型的穩(wěn)定性[6]和可擴(kuò)展性。
2.2.2 數(shù)據(jù)讀取
測(cè)試沖擊載荷作用下高速機(jī)械傳動(dòng)誤差,需要同時(shí)獲取2路信號(hào)。因此,在數(shù)據(jù)讀取模塊中,本文利用兩個(gè)單片機(jī)構(gòu)建了一個(gè)雙CPU系統(tǒng)[7],這兩塊單片機(jī)之間以并口通信的形式連通,共同完成模型的數(shù)據(jù)讀取需求。
單片機(jī)本文選擇的是AT89C51,內(nèi)部自帶256字節(jié)片內(nèi)RAM(隨機(jī)存取存儲(chǔ)器),工作狀態(tài)下頻率最高可達(dá)40MHz。當(dāng)波特率為115200bps時(shí),單片機(jī)與PC終端之間可進(jìn)行通信。數(shù)據(jù)讀取模塊的流程為:兩塊單片機(jī)使用T0計(jì)數(shù)方式,直接接入外部脈沖采集的現(xiàn)場(chǎng)信號(hào),并將兩塊單片機(jī)分為主、副,主單片機(jī)用來(lái)采集P2信號(hào),副單片機(jī)用來(lái)采集P1信號(hào)。當(dāng)采集到有效點(diǎn)時(shí),主單片機(jī)T0計(jì)數(shù)器[8]會(huì)出現(xiàn)中斷的情況,采集該時(shí)刻插補(bǔ)高頻時(shí)鐘脈沖信號(hào)Pt的計(jì)數(shù)值ts,同時(shí)將采集到有效點(diǎn)信息傳送給副單片機(jī)。在副單片機(jī)內(nèi),每采集到一個(gè)P1信號(hào),T0計(jì)數(shù)器就會(huì)出現(xiàn)中斷情況,采集當(dāng)前時(shí)刻下插補(bǔ)時(shí)鐘的脈沖Pt計(jì)數(shù)值ti,采集結(jié)果存儲(chǔ)在30H~6FH的緩沖區(qū)內(nèi)。在采集到有效點(diǎn)后,副單片機(jī)中斷后采集到的計(jì)數(shù)值記為t2,前兩次采集到的計(jì)數(shù)值記為t1、t0,通過(guò)P0口將采集結(jié)果反饋給主單片機(jī)。主單片機(jī)接收到來(lái)自副單片機(jī)的結(jié)果后,通過(guò)串行異步[9]的通信方式再反饋給PC終端,至此完成數(shù)據(jù)的讀取。
3 沖擊載荷作用下高速機(jī)械傳動(dòng)誤差計(jì)算
傳動(dòng)誤差指的是高速機(jī)械齒輪中輸出軸與輸入軸之間的理論轉(zhuǎn)角與實(shí)際轉(zhuǎn)角的差,為此將傳感器輸出的兩路信號(hào)P1和P2直接傳送至下位機(jī)模塊中,且不作任何分頻處理[10],通過(guò)比較2路不同頻率的脈沖信號(hào)個(gè)數(shù),得到高速機(jī)械齒輪間位移差。
首先對(duì)齒輪誤差進(jìn)行離散化處理,過(guò)程如式(1)所示
(1)
式(1)中,N1也可以看作是計(jì)數(shù)處理的最大量化誤差,這對(duì)于本文研究的柵線數(shù)傳感器來(lái)說(shuō)誤差大了一些,因此,需要進(jìn)行進(jìn)一步的細(xì)分。在2路傳感器信號(hào)中插入高頻脈沖Pt,計(jì)算得到相位差[12]的小數(shù)部分。
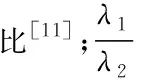
將圓光柵發(fā)出的脈沖信號(hào)看作是空間尺度,Pt看作是時(shí)間尺度,當(dāng)二者沒(méi)有連通在一起時(shí),Pt不具有實(shí)際意義。
在有效采樣點(diǎn)(位移信號(hào)P2i到來(lái)時(shí)刻ts)前后,建立信號(hào)P與Pt間關(guān)系圖[13],如圖1所示。這樣就可以將高分辨率的時(shí)間量轉(zhuǎn)換成為小數(shù)部分的空間量,這時(shí)使用線性(1次)插值,只需要采集時(shí)刻ts前的2個(gè)有效點(diǎn)即可。
圖1 傳動(dòng)誤差測(cè)試過(guò)程
為了使誤差測(cè)試模型具有更高的精度,可以在采樣點(diǎn)前后3個(gè)點(diǎn)內(nèi)利用拋物線進(jìn)行2次插值[14]。則第i次采樣下,脈沖信號(hào)P2中包含脈沖信號(hào)P1的數(shù)量為

(2)
通過(guò)計(jì)算采樣點(diǎn)后n+1個(gè)有效點(diǎn)的信息,即可得到第n次采樣時(shí),高速機(jī)械齒輪的拉格朗日插值[15]。那么,測(cè)試機(jī)械齒輪中輸出軸與輸入軸間的理論轉(zhuǎn)角與實(shí)際轉(zhuǎn)角的差,計(jì)算公式為
(3)
式中,?θ為傳動(dòng)誤差;θin代表高速機(jī)械齒輪的輸入軸實(shí)際轉(zhuǎn)角;θout代表高速機(jī)械齒輪的輸出軸實(shí)際轉(zhuǎn)角;m代表傳感器的減速比。
利用編碼器中的動(dòng)態(tài)測(cè)量方法,計(jì)算輸入軸與輸出軸之間的差值,獲取實(shí)時(shí)傳動(dòng)誤差。
4 機(jī)械傳動(dòng)誤差測(cè)試仿真
為了驗(yàn)證本文方法在實(shí)際應(yīng)用中效果,進(jìn)行仿真,仿真中用到的高速機(jī)械為滾齒機(jī),為了方便觀察,分解原始滾齒機(jī)中工作臺(tái),拿掉蝸桿掛輪,同時(shí)鎖住蝸桿軸,在原來(lái)刀桿的位置上放置一個(gè)蝸桿。對(duì)改進(jìn)后的滾齒機(jī)進(jìn)行調(diào)整,使蝸桿與蝸輪之間完美嚙合。
實(shí)驗(yàn)進(jìn)行過(guò)程中,工作臺(tái)是固定不動(dòng)的,僅需要讓滾齒機(jī)的刀桿軸進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng)即可。滾齒機(jī)工作臺(tái)與蝸輪軸之間以g5/H6配合。蝸桿作用于蝸輪,自由轉(zhuǎn)動(dòng),刀桿軸全跳動(dòng)小于5μm。以上所有調(diào)節(jié)均滿足三種算法誤差測(cè)試要求。
啟動(dòng)工作臺(tái),蝸桿開始運(yùn)動(dòng)并帶動(dòng)蝸輪做自由回轉(zhuǎn)運(yùn)動(dòng),這二者間的同步運(yùn)動(dòng)關(guān)系由同軸安裝的兩套光柵展現(xiàn),所得誤差就是該蝸輪副的傳動(dòng)誤差。
4.1 模型誤差測(cè)試精度自檢
利用機(jī)械移相法對(duì)本文模型進(jìn)行精度自檢,機(jī)械移相法是將人為制造的已知誤差引入到測(cè)試模型中,進(jìn)行測(cè)試精度檢定的一種方法。機(jī)械移相法示意圖如圖2所示。
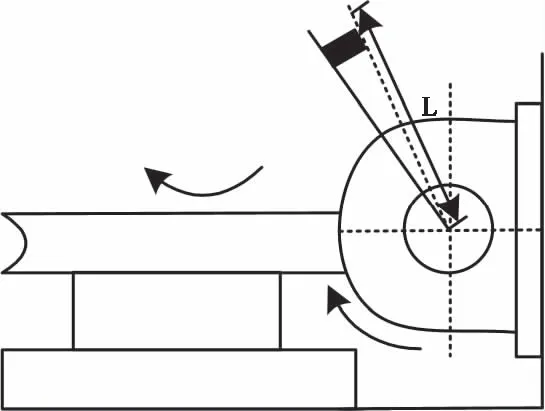
圖2 機(jī)械移相法示意圖
機(jī)械移相法模型測(cè)試精度檢定過(guò)程為:在蝸桿傳感器撥桿上任選一個(gè)位置,放置一個(gè)百分表,使其平面與傳感器平面平行。將百分表的讀數(shù)定義為l1,蝸輪旋轉(zhuǎn)一圈,則得到一條正常的測(cè)試曲線,接著再旋轉(zhuǎn)一圈進(jìn)行自檢。在旋轉(zhuǎn)開始一段時(shí)間后插入量塊,記錄此時(shí)的讀數(shù)l2,測(cè)量持續(xù)一段時(shí)間后取出量塊,蝸輪旋轉(zhuǎn)一周結(jié)束。當(dāng)插入量塊后,測(cè)試曲線與第一次曲線相比會(huì)出現(xiàn)下移的現(xiàn)象,但是曲線的走勢(shì)與波動(dòng)卻是完全一致的;當(dāng)取出量塊后,測(cè)試曲線又會(huì)出現(xiàn)上移的現(xiàn)象,最終與第一次旋轉(zhuǎn)曲線完全重合。誤差測(cè)試模型精度自檢曲線如圖3所示。
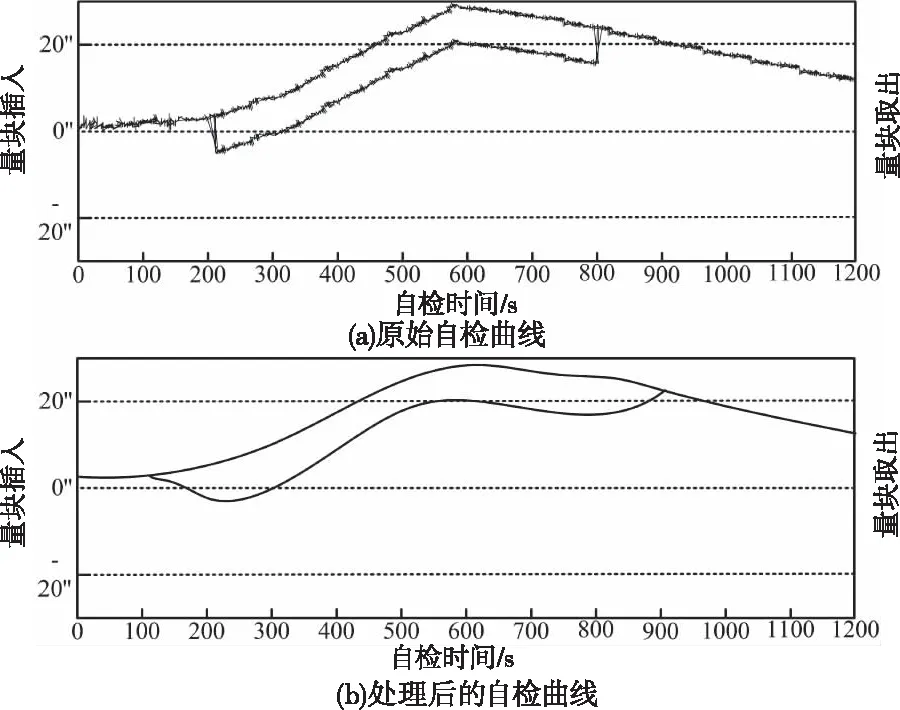
圖3 誤差測(cè)試模型精度自檢曲線
接下來(lái),對(duì)沖擊載荷作用下機(jī)械傳動(dòng)誤差測(cè)試模型精度自檢精度進(jìn)行具體分析。兩次百分表讀數(shù)差值l2-l1代表的是人為制造的已知誤差值l,百分表觸點(diǎn)與傳感器中心的距離為L(zhǎng)。利用式(4)將I轉(zhuǎn)換為蝸輪轉(zhuǎn)過(guò)的角秒值φ,φ即人為制造已知誤差的真值

(4)
在兩次旋轉(zhuǎn)曲線中,在插入量塊與取出量塊之間內(nèi)選取n個(gè)點(diǎn)(a21,a22,a23,…,a2n;a11,a12,a13,…,a1n),兩次旋轉(zhuǎn)曲線一一對(duì)應(yīng)做減法計(jì)算,所得結(jié)果再做平均值計(jì)算,最終結(jié)果即為測(cè)試模型的測(cè)得值。測(cè)得值就是人為制造已知誤差的差值,也就是實(shí)驗(yàn)所得本文構(gòu)建測(cè)試模型的精度值。
(5)
在模型測(cè)試精度自檢的實(shí)驗(yàn)中,取值分別為:L=500mm、l1=0mm、l2=1mm、I=80,代入到計(jì)算公式中,可得φ=17.2″。對(duì)插入量塊到取出量塊的200~800區(qū)間內(nèi)的600個(gè)點(diǎn)作為測(cè)量點(diǎn)進(jìn)行計(jì)算,可得誤差測(cè)試模型的精度(根據(jù)相對(duì)誤差計(jì)算得到)為±0.136%,符合一級(jí)蝸輪副的測(cè)量要求。說(shuō)明本文構(gòu)建的誤差測(cè)試模型可將誤差控制在合理范圍內(nèi),具有理想的測(cè)試精度。
4.2 算法誤差測(cè)試結(jié)果對(duì)比
為使實(shí)驗(yàn)結(jié)果更具有普適性,將其與引言中提到的雙邊加載模式和高精度編碼器方法進(jìn)行實(shí)驗(yàn)對(duì)比。通過(guò)數(shù)據(jù)采集模塊獲取到?jīng)_擊作用下機(jī)械信號(hào),導(dǎo)入到Matlab軟件中,在設(shè)備運(yùn)行到500秒和800秒時(shí),人為添加兩組誤差信號(hào),如圖4所示,利用三種算法對(duì)這組信號(hào)進(jìn)行傳動(dòng)誤差的測(cè)試,所得結(jié)果如圖5所示。
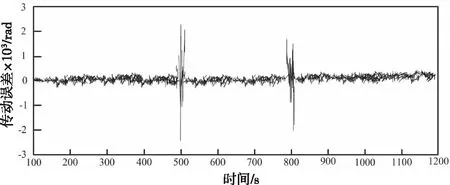
圖4 原始沖擊載荷作用下的機(jī)械信號(hào)
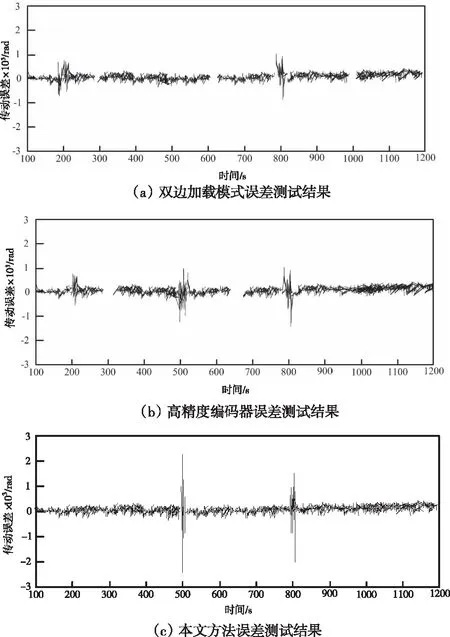
圖5 三種算法誤差測(cè)試結(jié)果對(duì)比
從圖5中可以看出,雙邊加載模式和高精度編碼器兩種算法因沖擊載荷的作用,測(cè)試結(jié)果同時(shí)出現(xiàn)了間斷不連續(xù)的情況,都沒(méi)有準(zhǔn)確檢測(cè)到誤差。反觀本文方法,沒(méi)有受到?jīng)_擊載荷的作用影響,檢測(cè)到信號(hào)曲線與原始曲線走勢(shì)大致相同,可實(shí)現(xiàn)對(duì)傳動(dòng)誤差的精準(zhǔn)測(cè)試。
5 結(jié)論
由本文構(gòu)建的沖擊載荷作用下的高速機(jī)械傳動(dòng)誤差測(cè)試模型目前已投入實(shí)際應(yīng)用中,對(duì)此做了以下3點(diǎn)總結(jié):
1)本文構(gòu)建的誤差測(cè)試模型在振動(dòng)與噪聲相結(jié)合的環(huán)境下依然有效;
2)通過(guò)上、下機(jī)位兩個(gè)模塊,大大擴(kuò)展了模型的應(yīng)用范圍,可直接與監(jiān)控系統(tǒng)連通,完成更深層次的誤差檢測(cè);
3)本文構(gòu)建的誤差模型通過(guò)FPGA進(jìn)行機(jī)械信號(hào)的采集,與CY7C68013模塊進(jìn)行配置的初始化操作,和其它模塊之間實(shí)現(xiàn)了高速率連通,從而使模型整體結(jié)構(gòu)更加合理、緊湊,具有更為理想的可擴(kuò)展性和更高的可靠性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
