基于改進BP算法的模具零件表面拋光質量預測研究
2023-10-29 14:50:00劉守河易建業
模具工業 2023年10期
劉守河, 易建業, 謝 暉,2
(1.季華實驗室, 廣東 佛山 528200;2.大捷智能科技(廣東)有限公司, 廣東 佛山 528225)
0 引 言
隨著工業機器人智能自動化技術的迅速發展,工業機器人自動研磨拋光技術因具有作業強度低、環境好、打磨質量一致性好等優勢,廣泛應用于航空航天、車輛、家電、船舶等領域[1]。模具作為制造業中工藝裝備和現代工業制造的基礎,是衡量制造業水平的重要標準之一,在汽車、電子、機械制造及航空航天等領域中承擔著重要的作用[2]。模具零件表面處理尤其是汽車沖模零件表面的精加工是保證工件表面質量的關鍵[3],但因其型面復雜,表面質量要求也較高,所以較多汽車沖模零件表面復雜曲面的研磨、拋光等工序仍依靠熟練工人的手工操作,不但生產效率低,而且對人工技能要求較高。在模具制造過程中,實現機器人全自動化、智能化研合、拋光[4-6],對提升模具零件表面研磨、拋光品質,減輕模具制造人員勞動強度,縮短模具制造周期具有重要意義[7]。
在模具零件表面自動化拋光過程中,為保證研磨拋光后的表面質量滿足需求,需要不斷調試、優化拋光工藝參數,導致打磨、拋光工藝參數的調試周期長,效率低,且針對不同的產品需求,拋光工藝參數的適應性較低,因此對模具零件表面拋光質量預測以及拋光工藝參數優化的研究尤為重要。
目前,針對模具零件表面拋光主要集中于模具自動化拋光軌跡、表面質量、磨具材質、基于材料去除理論的拋光工藝參數等的研究。其中,馬長捷[8]基于Preston 理論建立材料去除函數的理論模型,并進行仿真分析,總結了打磨工藝參數對于拋光表面質量的影響規律;張雷等[9]利用多元線性回歸正交試驗建立了模具零件曲面拋光工藝過程模型,通過仿真和試驗結果表明該模型綜合反映了拋光工藝參數對拋光效果的影響規律;陳滿意等[10]提出了一種能夠適應系統剛度變化的模糊自適應阻抗控制模型,該模型通過提供穩定的法向力控制和位置控制,提高了模具零件表面拋光質量;ZHAO T 等[11]為提高表面拋光質量,通過單因素試驗獲取了拋光工藝參數的優化范圍,并利用二次非線性回歸方法建立了表面粗糙度預測模型。針對工藝參數優化、表面質量預測問題,目前已有學者基于不同模型進行了大量研究。韓天勇等[12]研究了刀具轉速、拋光力、行間距、機器人進給速度對零件表面拋光質量的影響,基于PSO-SVM 方法建立了曲面零件拋光粗糙度預測模型;李健等[13]提出一種改進后的粒子群神經網絡模型,用于識別刀具的磨損狀態;潘杰等[14]基于工件表面材料去除原理,建立了拋光工藝參數與材料去除率和表面粗糙度的數學模型,得出影響拋光質量的工藝參數,并基于SPSO-BP 方法建立了拋光后工件表面質量的預測模型。
目前,機器算法被廣泛應用于工藝參數優化領域。模具自由曲面拋光是多工藝參數耦合相互作用的過程,拋光后的表面質量取決于多項評價指標,為了研究模具零件拋光后表面質量預測及工藝參數優化問題,現通過采集模具拋光后的表面質量參數,作為測試樣本集,將混沌理論、動態權重、動態學習因子和高斯變異方法引入粒子群尋優算法(particle swarm optimization,PSO),利用改進后的粒子群尋優算法(improved particle swarm optimization,IPSO)對神經網絡(back propagation,BP)模型中的權重和閾值更新策略進行優化,實現了對模具零件拋光后的表面粗糙度和去除量的預測,并結合快速非支配排序遺傳算法(NSGA-II)建立多目標優化模型,實現對模具零件拋光工藝參數的優化。
1 模具零件表面拋光分析
模具零件自由曲面拋光后的表面質量一方面與機器人拋光系統有關;另一方面與主軸轉速、拋光壓力、步距、機器人進給速度、磨頭目數等工藝參數有關。現主要對模具零件表面拋光過程進行受力分析,并建立模具零件表面拋光去除模型。
1.1 彈性磨頭與模具零件表面接觸分析
圖1所示為彈性芝麻粒磨頭與待加工工件曲面的接觸簡圖,其中磨頭半徑為R,拋光力為F,磨頭轉速為ω,彈性磨頭主軸方向與模具零件接觸面法線方向夾角為α,接觸壓力為Fn,滿足Fn=Fcosα。
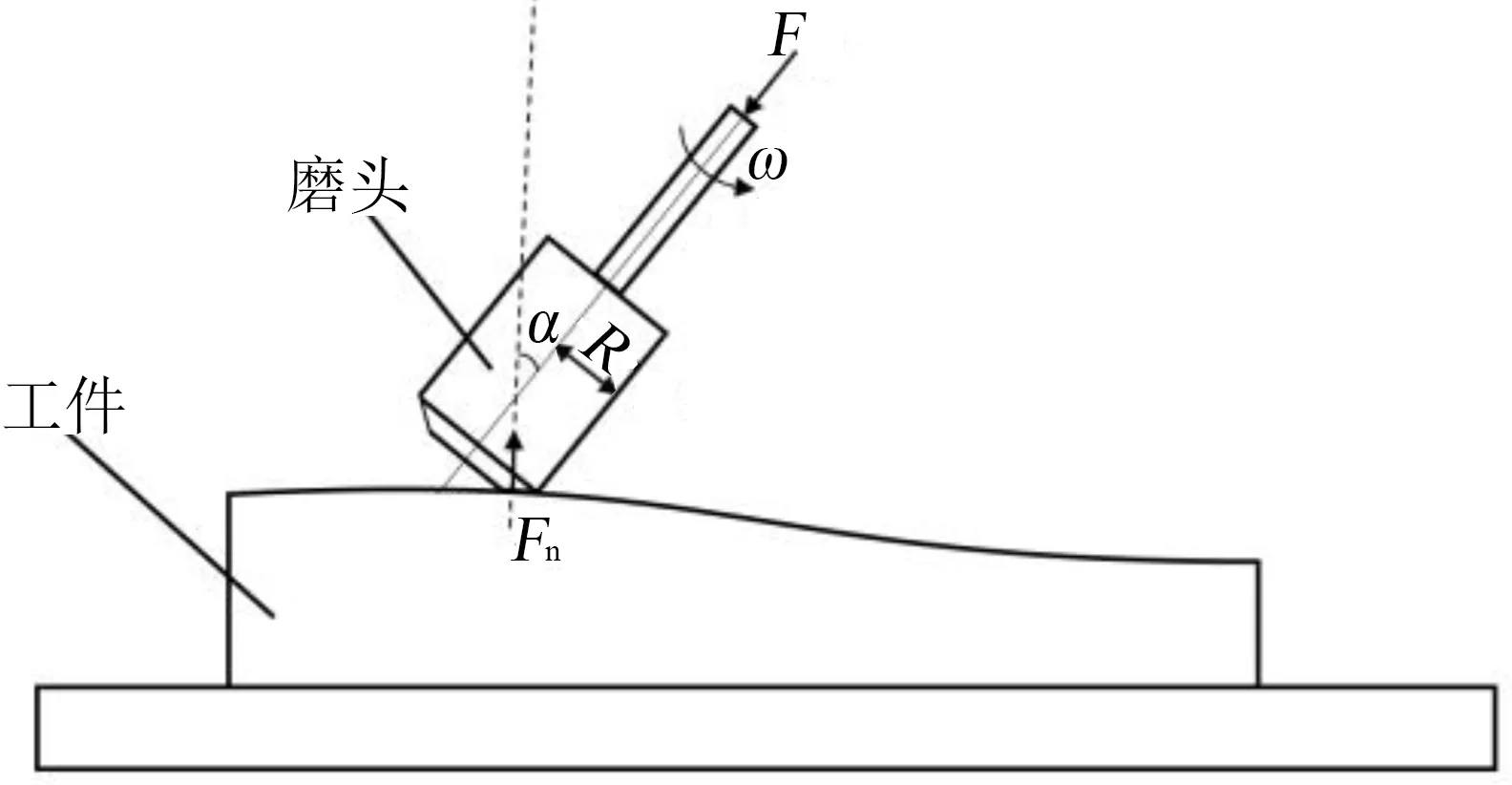
圖1 彈性磨頭與模具零件自由曲面接觸簡圖
將模具零件拋光過程簡化為彈性體與剛性曲面接觸,接觸區域如圖2所示,彈性磨頭與模具零件自由面的接觸區域近似為橢圓,依據Hertz 理論,接觸區域內任意一點(x,y)的接觸壓力[15]可以表示為:
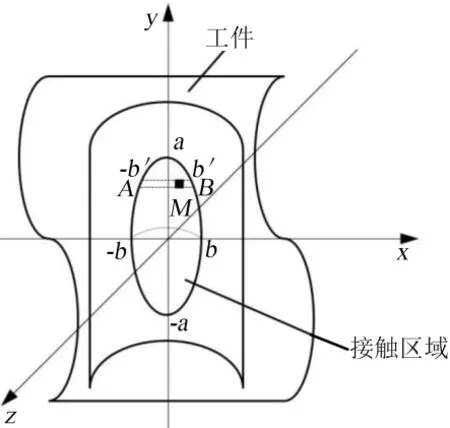
圖2 拋光接觸區域
其中,a,b分別為橢圓接觸區域的長、短半軸。彈性磨頭與模具零件表面的相對運動速度也會影響模具零件表面的拋光去除量,對于接觸區域內任意一點A(x,y),建立接觸區域速度矢量模型,如圖3所示。
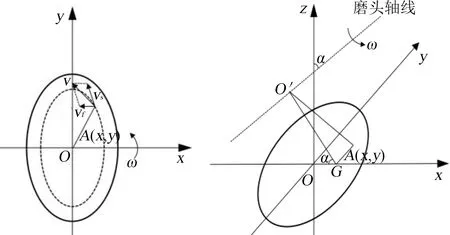
圖3 接觸區域速度矢量模型
接觸區域內任意一點(x,y)的速度為:
其中,δ表示彈性磨頭變形量。
1.2 模具零件表面拋光去除模型
在拋光加工領域,研究人員通常采用Preston 方程建立材料去除模型,其描述了在拋光加工過程中的材料去除量與拋光工藝參數之間的關系,具體表達式為:
其中,Kp為Preston 常數,一般由試驗確定,與磨頭材質與工件硬度有關;v為彈性磨頭與工件之間的相對速度;p表示接觸區域內彈性磨頭與工件之間的接觸壓力。
材料去除量可以表示為:
其中,vs表示磨頭某點的切向線速度;vf表示磨頭沿工件的進給速度。
圖2所示的微元M的材料去除量可以表示為:
2 試驗設備和方案
2.1 機器人自動化拋光平臺和拋光質量檢測系統
模具零件自動化拋光試驗平臺主要由機器人、主軸電機、恒力浮動裝置、七軸移動平臺等組成,如圖4所示。模具零件表面拋光質量檢測主要包括粗糙度檢測和表面去除量檢測,其中拋光后工件表面粗糙度由手持便攜式粗糙度測量儀測量,工件表面去除量由三坐標測量儀測量,如圖5所示。

圖4 機器人自動拋光設備
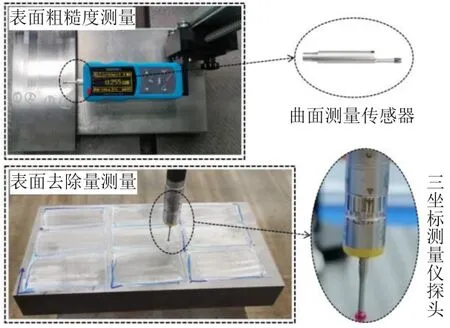
圖5 表面質量檢測
2.2 試驗步驟及方案
在建立模具零件表面拋光質量預測模型之前需要獲取一定數量的工藝試驗數據,通過前期的試驗總結,分析了影響拋光后模具零件表面粗糙度和模具零件表面去除量的工藝參數,其中主要包括拋光工藝參數和彈性磨頭參數,選取主軸電機轉速N、打磨壓力F、進給速度V、磨頭目數K、磨頭直徑D作為設計變量,模具零件表面粗糙度Ra和模具零件表面去除量S作為目標變量。根據拋光工藝參數調試經驗和彈性磨頭參數型號確定各設計變量取值范圍,如表1所示。
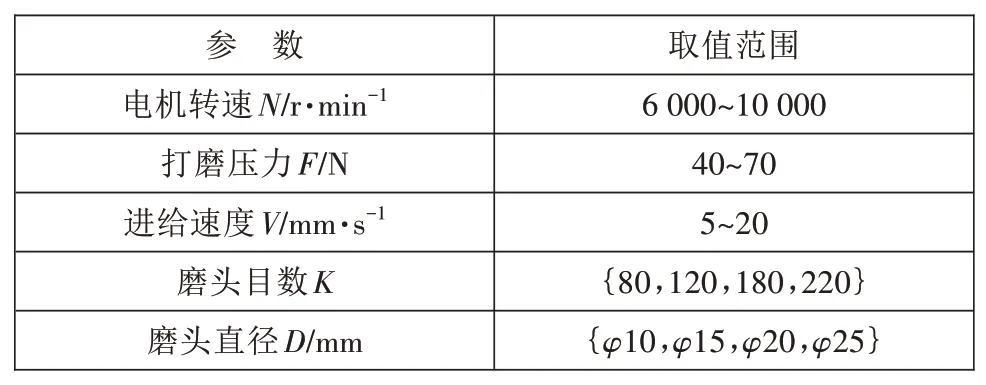
表1 設計變量取值范圍
采集96組試驗樣本數據,部分樣本數據組合如表2所示。
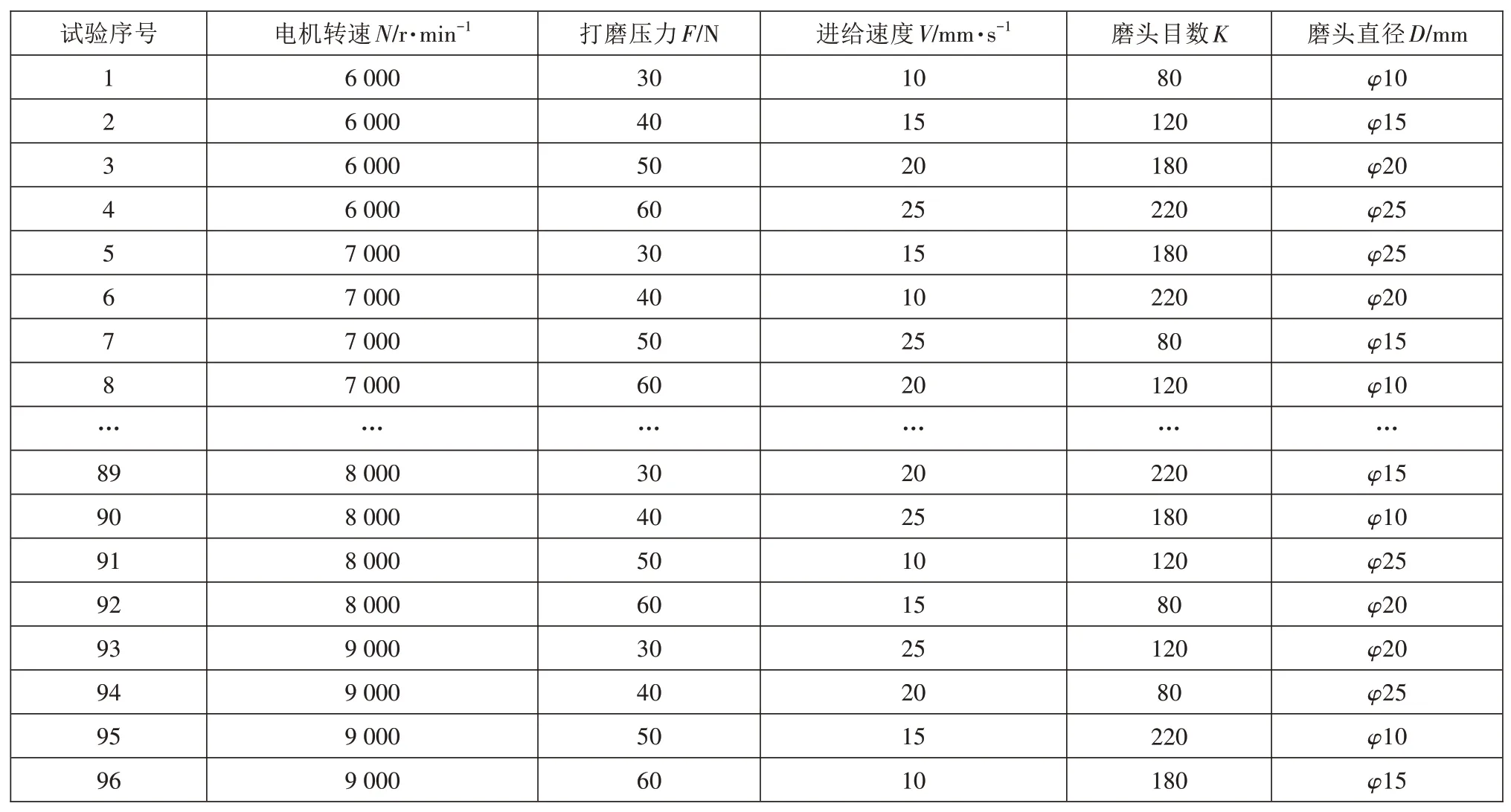
表2 試驗樣本數據
拋光試驗材料為120 mm×220 mm×30 mm 的SKD11 模具鋼,拋光工具為彈性芝麻粒磨頭,部分芝麻粒磨頭參數如圖6 所示,打磨軌跡均為往復路徑,如圖7所示。
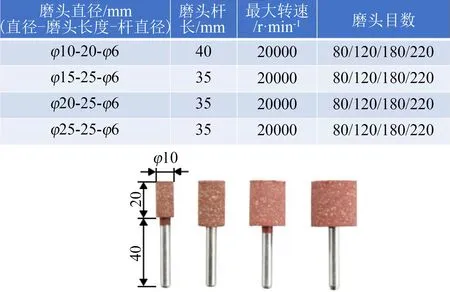
圖6 芝麻粒磨頭參數
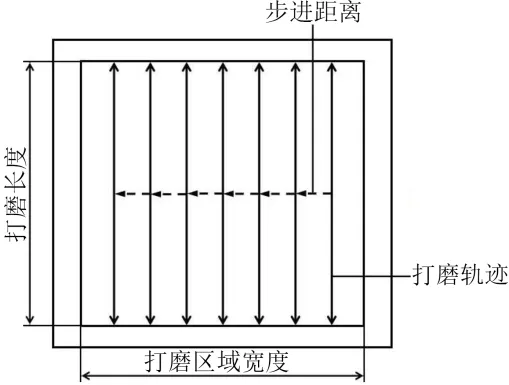
圖7 磨頭打磨路徑
完成試驗方案中所有試驗組合后,對拋光后的試驗樣件的表面粗糙度和去除量進行測量,利用手持粗糙度儀測量樣件表面粗糙度(見圖5),測量時選取拋光區域均勻分布的4 個測點,每點的取樣長度為0.8 mm,每個點測量5 次。完成表面粗糙度測量后對樣件表面去除量進行測量,采用龍門式三坐標測量儀,對樣件拋光前的表面進行基準測量,采集樣件表面均勻分布的9 組點位進行測量,獲取樣件拋光前的基準值。樣件拋光后,對相同點位進行測量,將拋光區域內的點位測量值與基準值進行對比,取區域內所有測點差值的平均值作為最終表面去除量。表3 所示為測量得到的部分試驗數據結果。
3 模具零件表面拋光質量預測模型與方法
3.1 BP神經網絡
人工神經網絡利用訓練樣本,通過自身不斷地訓練進而學習模型輸入量和輸出量之間的非線性映射規則,實現對輸出量預測的數據信息處理系統。在眾多神經網絡模型中,BP神經網絡是一種應用較廣泛的多層前饋神經網絡模型[16],主要包括輸入層、隱含層、輸出層以及層與層之間的權值和閾值。
現引入BP 神經網絡構建模具零件表面拋光質量的預測模型,預測模型包含輸入層、隱含層和輸出層,圖8所示為神經網絡訓練模型結構,其中模型的相應參數如下。
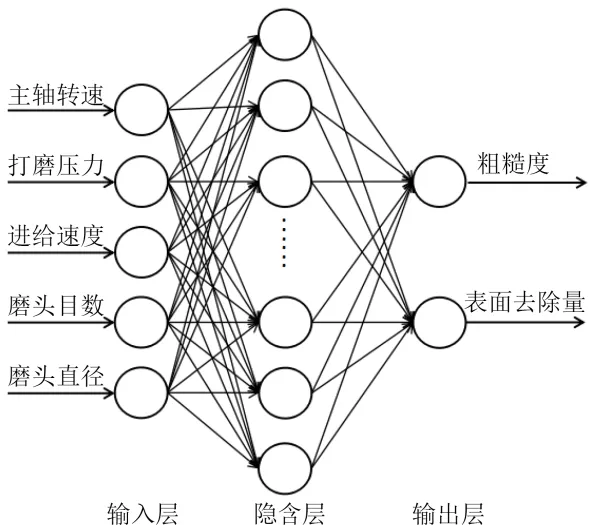
圖8 神經網絡訓練模型結構
(1)輸入層節點。將影響拋光后模具零件表面粗糙度Ra和表面去除量S的工藝參數作為輸入層節點,即選取主軸電機轉速N、打磨壓力F、進給速度V、磨頭目數K、磨頭直徑D作為模型的輸入節點。
(2)輸出層節點。將模具零件拋光質量評價指標表面粗糙度Ra和表面去除量S作為神經網絡模型的目標預測量,即選取粗糙度Ra和去除量S作為模型的輸出節點。
(3)隱含層神經元數。隱含層神經元數確定通常參考Kolmogorov 定理并采用試湊法[17],隱含層神經元的個數通過經驗公式確定,選取隱含層神經元節點為6。
(4)激活函數。隱含層和輸入、輸出層每個神經元節點之間的關系可以表示為:
其中,xi為神經元輸入量;ξi為輸入量權值;φ為神經元閾值。
選用Sigmoid函數作為激活函數,其表達式為:
3.2 IPSO-BP算法
在BP神經網絡預測模型中,采用梯度下降的更新策略對預測模型的權值和閾值進行更新,容易獲取局部最優解。采用IPSO 算法改進預測模型中權值和閾值的更新策略,以獲取全局最優解。
PSO 算法由于具有較強的全局和局部搜索能力,常用于解決優化配置、參數優化等問題。PSO算法在可行解空間內隨機生成粒子初始種群,各粒子的位置都對應尋優問題的解值,通過不斷更新粒子的位置和速度尋求在可行解空間的最優值。
在迭代尋優過程中,粒子的速度和位置可以表示為:
其中,xi、vi分別表示第i個粒子的位置和速度;qi表示粒子個體極值;pi表示粒子種群極值;ω∧為慣性權重;j為尋優空間維數;t為迭代次數;c1、c2為學習因子;r1、r2為[0,1]內的隨機數。
在搜尋過程中,PSO 算法可能會由于種群多樣性降低以及種群分布不均勻,陷入局部最優搜尋,影響算法優化性能。現通過耦合混沌理論、動態權重、動態學習因子和高斯變異方法,改進了粒子群優化算法,其具體流程如下。
(1)利用混沌映射的隨機性、遍歷性及初值敏感性的特點,將其用于初始化PSO 粒子種群,提高種群的多樣性和均勻性,現采用Tent 映射方法初始化PSO種群。
(2)Tent混沌映射序列:
(3)將Tent混沌映射序列映射到搜索空間:
利用Tent 映射方法初始化PSO 種群,使其遍歷搜索空間,提高算法的最優搜尋概率。
(4)為了保證PSO 算法全局尋優以及局部尋優能力,引入動態權重方法,提高算法穩定性以及收斂速度,其可以表示為:
(5)構造動態學習因子,為了平衡算法的全局尋優能力和局部尋優能力,滿足在算法初期注重粒子個體尋優解,后期注重粒子群體尋優解,在粒子速度更新公式中引入動態學習因子,其表達式為:
其中,c1_max、c1_min、c2_max、c2_min分別表示學習因子c1、c2的最大、最小值,具體值為2.1、0.8、2.1、0.8。
(6)為了避免PSO 算法在后期陷入局部最優解,在粒子速度更新公式中粒子個體項引入高斯變異項,提高算法跳出局部最優解的能力,引入高斯變異項后的粒子速度可以表示為:
其中,k1、k2為[0,1]的隨機數表示高斯變異值;ε為均值;σ2為方差。
為了驗證IPSO 相比于PSO 算法的收斂精度高,分別利用單峰測試函數(F1,F2)和多峰測試函數(F3,F4)對IPSO 進行測試,測試函數表達式如表4 所示。獨立運行20 次后,測試結果如表5 所示,收斂曲線如圖9所示。
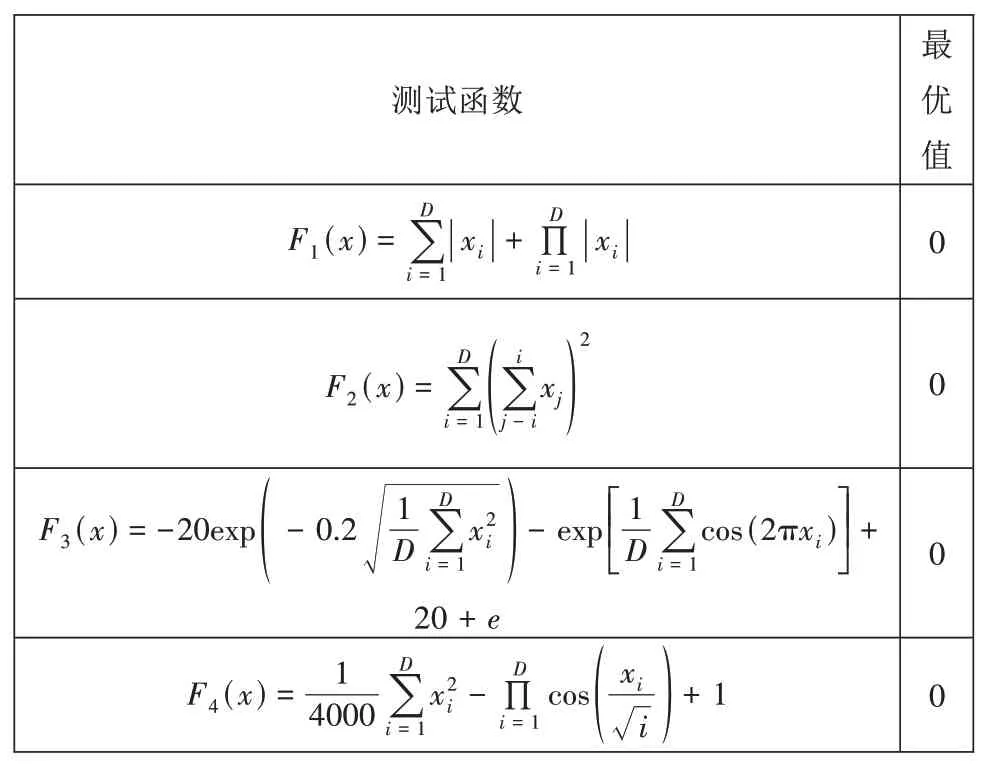
表4 測試函數表達式
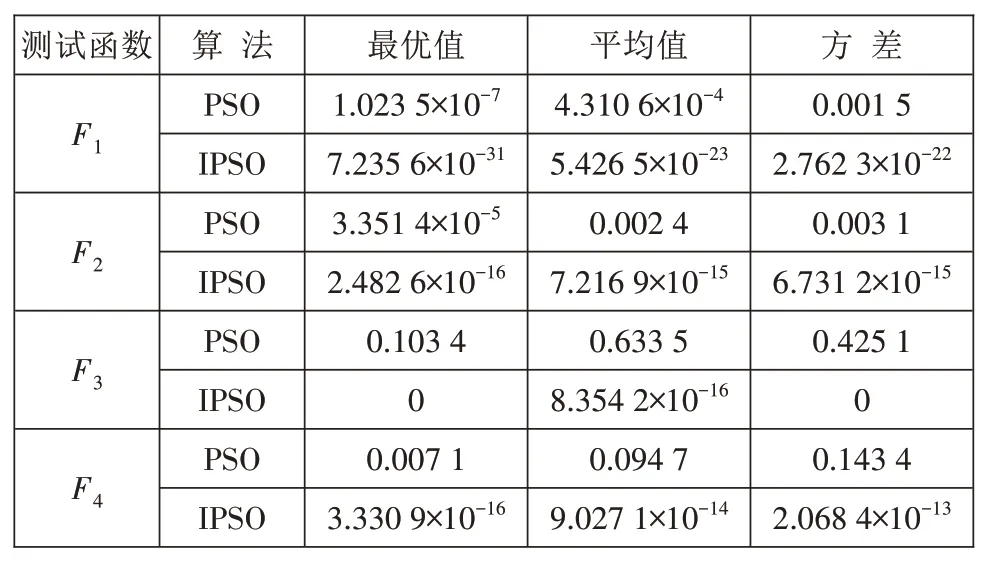
表5 測試結果
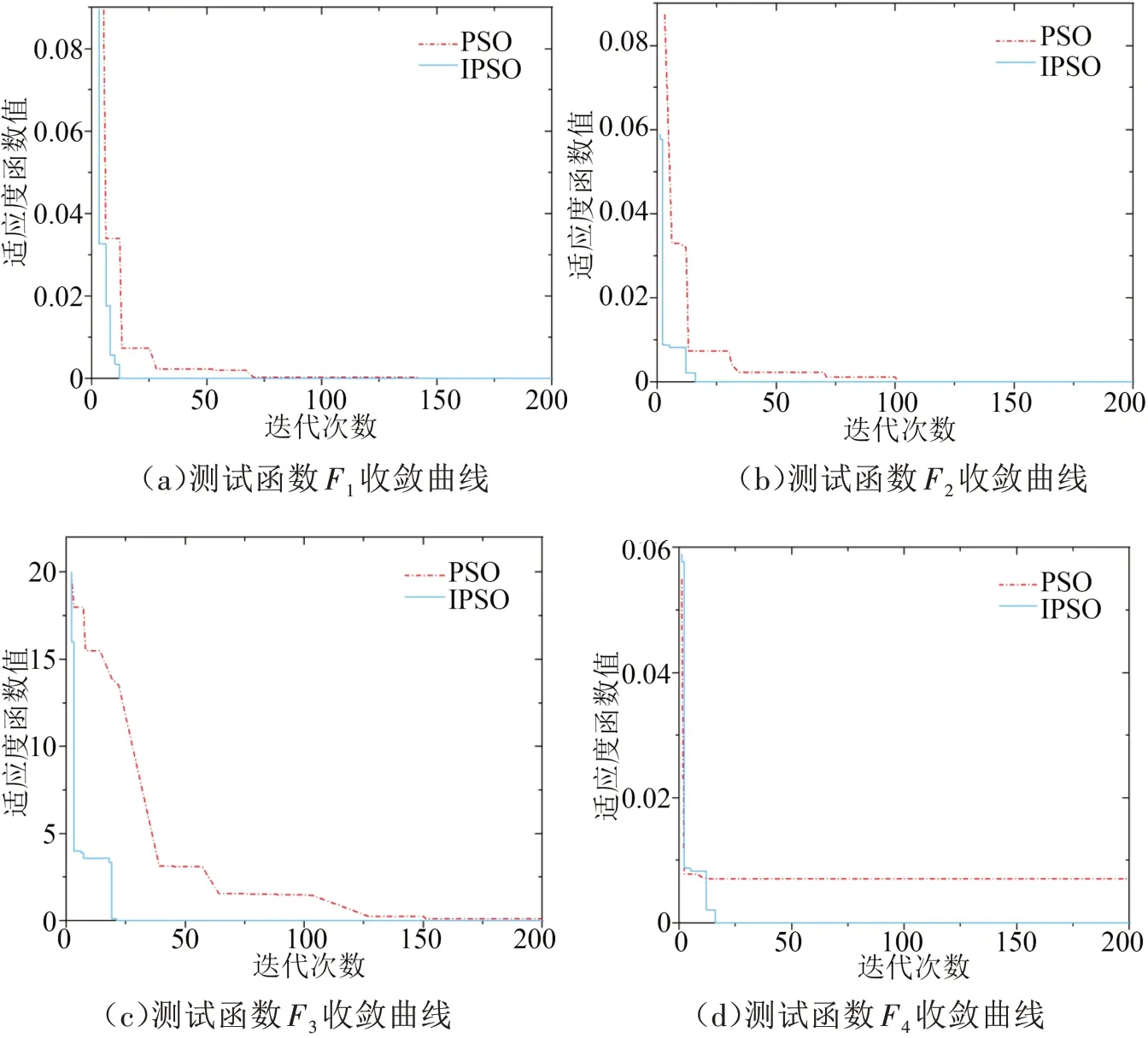
圖9 IPSO和PSO算法對測試函數的收斂曲線
由表5 可知,從最優值、均值和方差3 個維度分析,IPSO 在有限迭代次數下其收斂精度均高于PSO,故耦合混沌理論、動態權重、動態學習因子和高斯變異方法的IPSO 具有更強的參數尋優能力;從圖9可以看出,IPSO算法的尋優速度更快,可以用于對BP 預測模型的優化。IPSO-BP 預測模型流程如圖10所示。
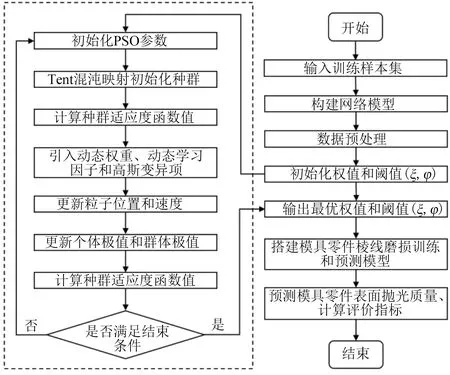
圖10 IPSO-BP預測模型流程
3.3 模具零件表面拋光質量預測模型
模具零件表面拋光質量預測模型如圖11所示,預測模型主要包括預測目標函數、預測模型輸入參數和預測模型算法。在預測目標函數中,g(U)表示模具零件表面質量參數(粗糙度Ra和表面去除量S)與預測模型輸入參數集U之間的非線性關系。在預測模型輸入參數集U中,主要包括拋光工藝參數和彈性磨頭參數,即主軸電機轉速N、打磨壓力F、進給速度V、磨頭目數K、磨頭直徑D。在預測模型算法中,定義了求解預測目標函數的方法集IPSOBP,其中包括混沌理論、動態權重、動態學習因子和高斯變異方法和PSO 的IPSO 算法以及BP 預測模型。
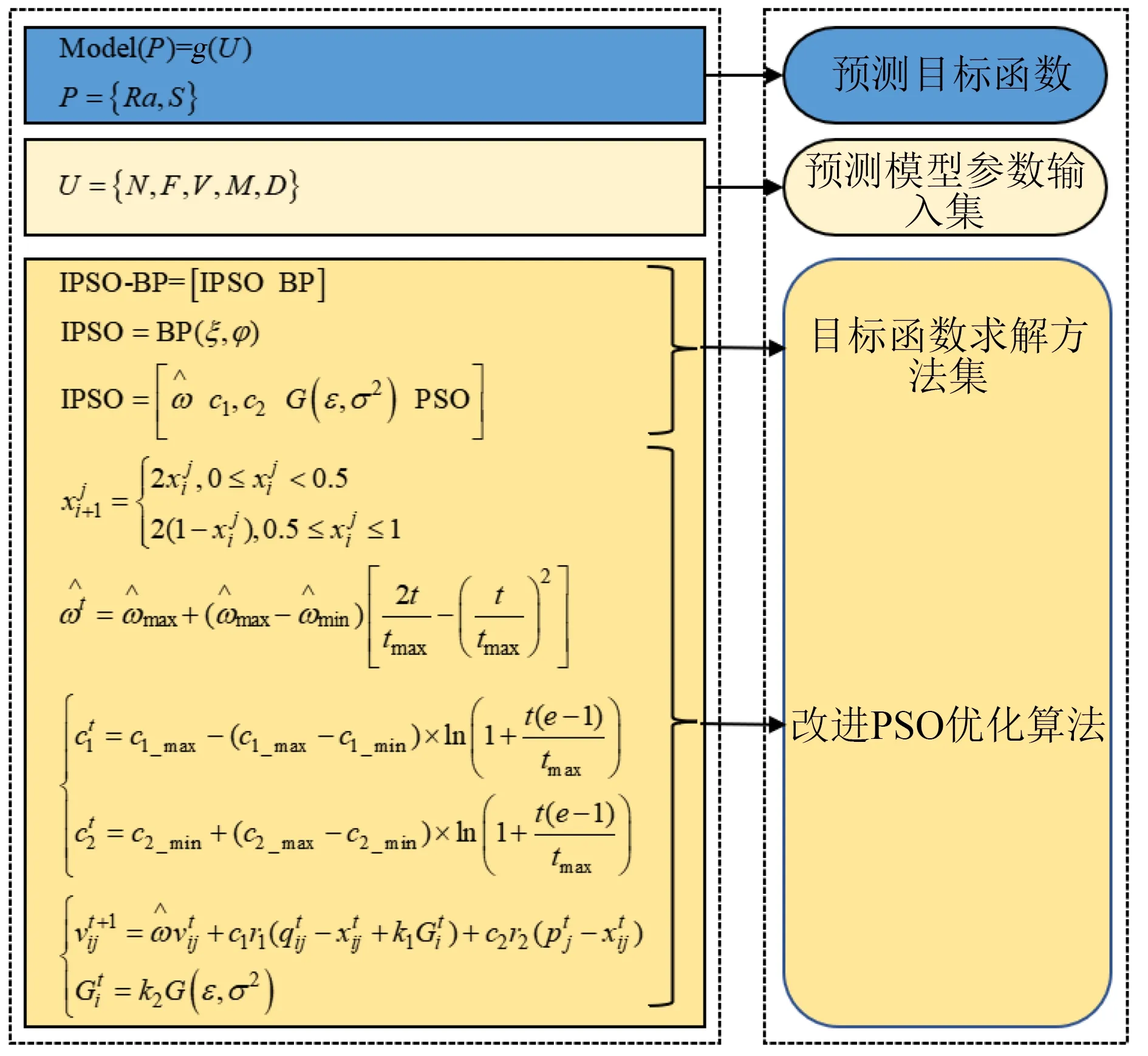
圖11 模具零件表面拋光質量預測模型
4 模具零件表面拋光質量預測結果分析
以不同誤差評價指標為依據,對比不同預測模型的預測結果闡述基于IPSO-BP算法的模具零件表面拋光質量預測模型的實際效果。采用以下誤差指標對預測模型的預測精度進行評價,如表6所示。
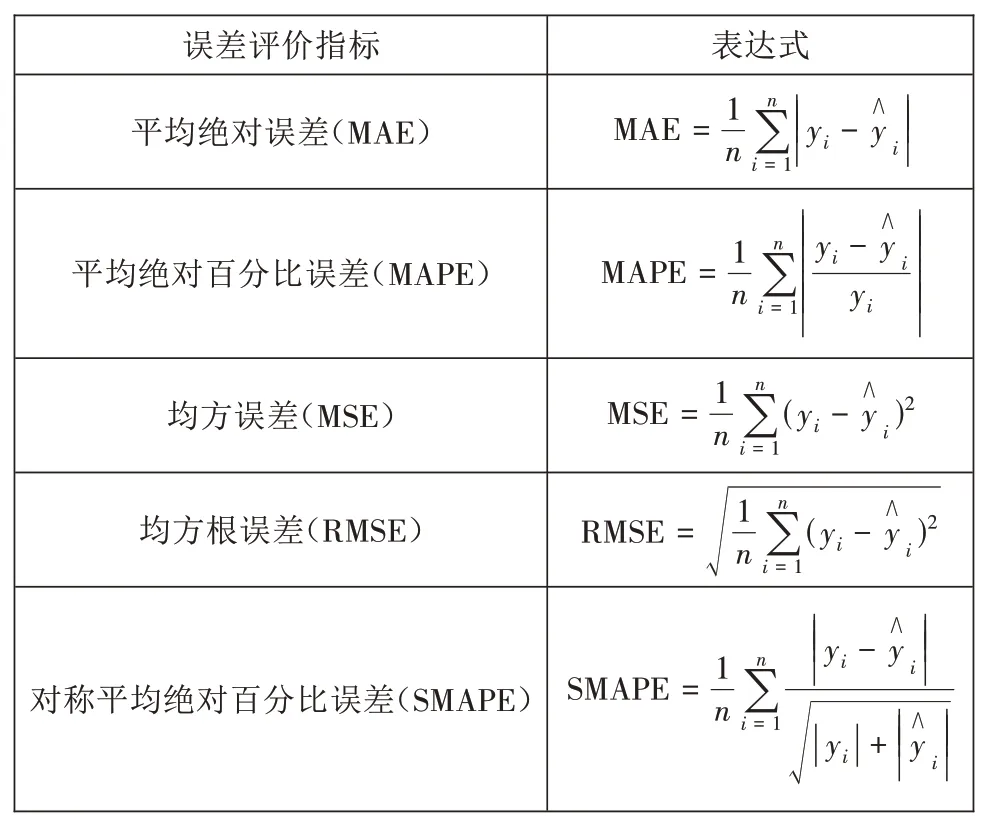
表6 預測模型誤差指標
4.1 預測結果
利用獲取的采樣樣本作為輸入參數集,以拋光工藝試驗測量獲取的模具零件表面拋光質量結果作為訓練樣本集,其中有效樣本集為96 組,將其劃分為訓練集(80組數據)和測試集(16組數據)。
預測模型訓練步驟如下:①確定預測模型輸入神經元與輸出神經元個數;②初始化粒子種群數量初步設定為30,tmax初步設定為300;③完成對訓練樣本集的歸一化處理;④利用改進后的粒子群尋優算法對BP 模型權值和閾值進行更新;⑤基于IPSOBP 預測模型對試驗樣件拋光后的表面粗糙度和表面去除量進行預測,預測結果如圖12所示。
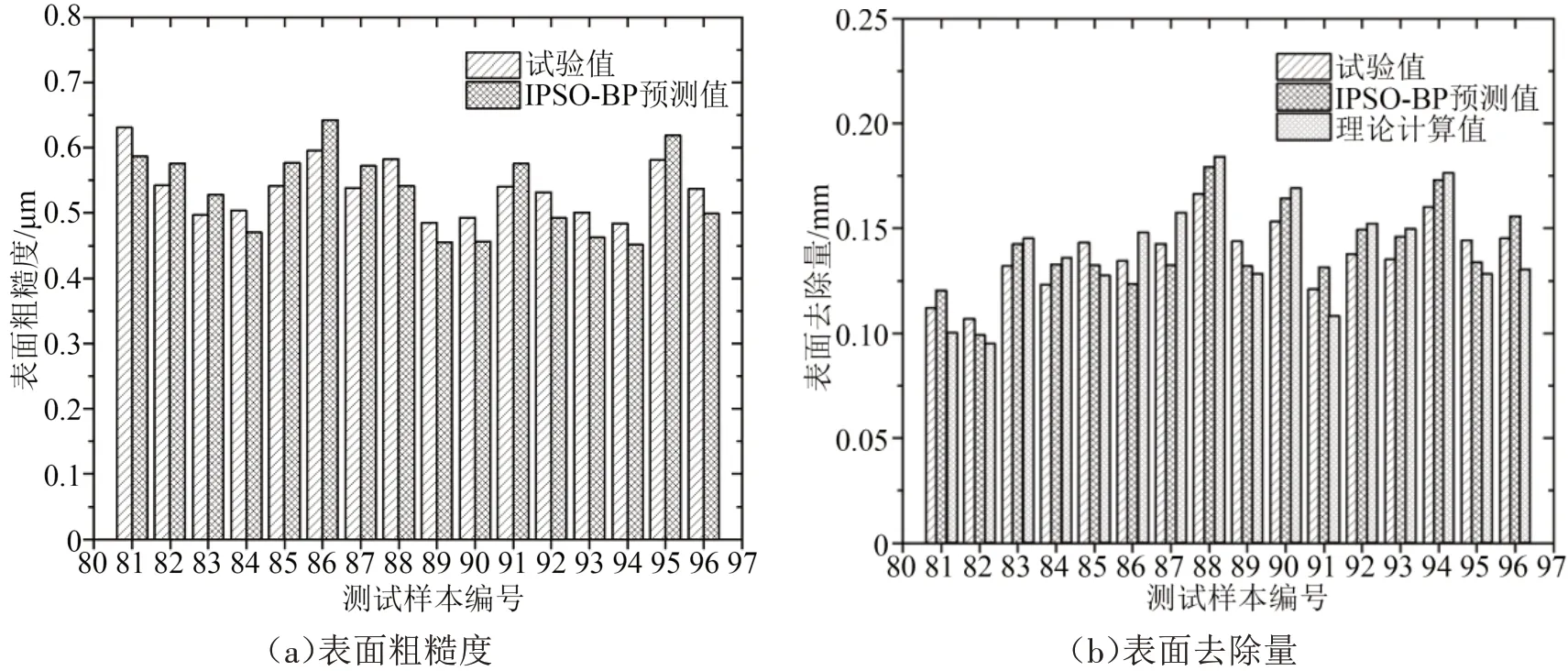
圖12 基于IPSO-BP算法的模具零件表面拋光質量預測結果
從圖12可以看出,通過拋光工藝試驗測量的表面粗糙度和表面去除量與其預測值誤差較小,說明建立的基于IPSO-BP方法的預測模型可以較好地預測表面粗糙度和表面去除量。計算預測模型精度評價指標值,包括MAE、MAPE、MSE、RMSE、SMAPE,計算結果如表7所示,預測模型的各項誤差指標均處于較低水平,表明預測模型具有一定的穩定性,可以用于對模具零件表面拋光質量的預測。
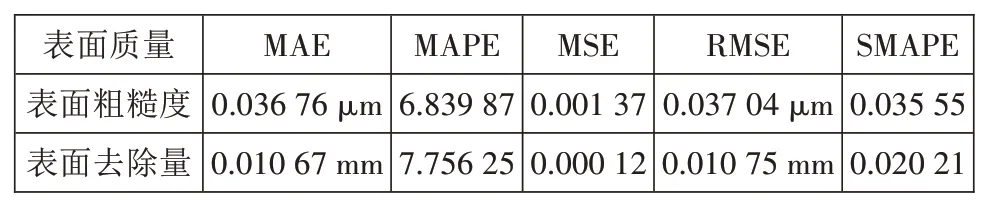
表7 預測模型各項誤差評價指標值
4.2 常用預測模型對比分析
為了驗證提出的基于IPSO-BP 方法的模具零件表面拋光質量預測模型的優越性,將IPSO-BP 預測模型與基于PSO-BP、BP、支持向量回歸(support vector regression,SVR)、多元線性回歸(multiple linear regression,MLR)方法搭建的常規預測模型以及理論計算值進行對比。常規預測模型和理論計算值的結果如圖13 所示,常規預測模型和基于IPSO-BP方法的預測模型都可以用于預測粗糙度和表面去除量,但相比于常規預測模型,改進后的IPSO-BP預測模型具有更高的預測精度。
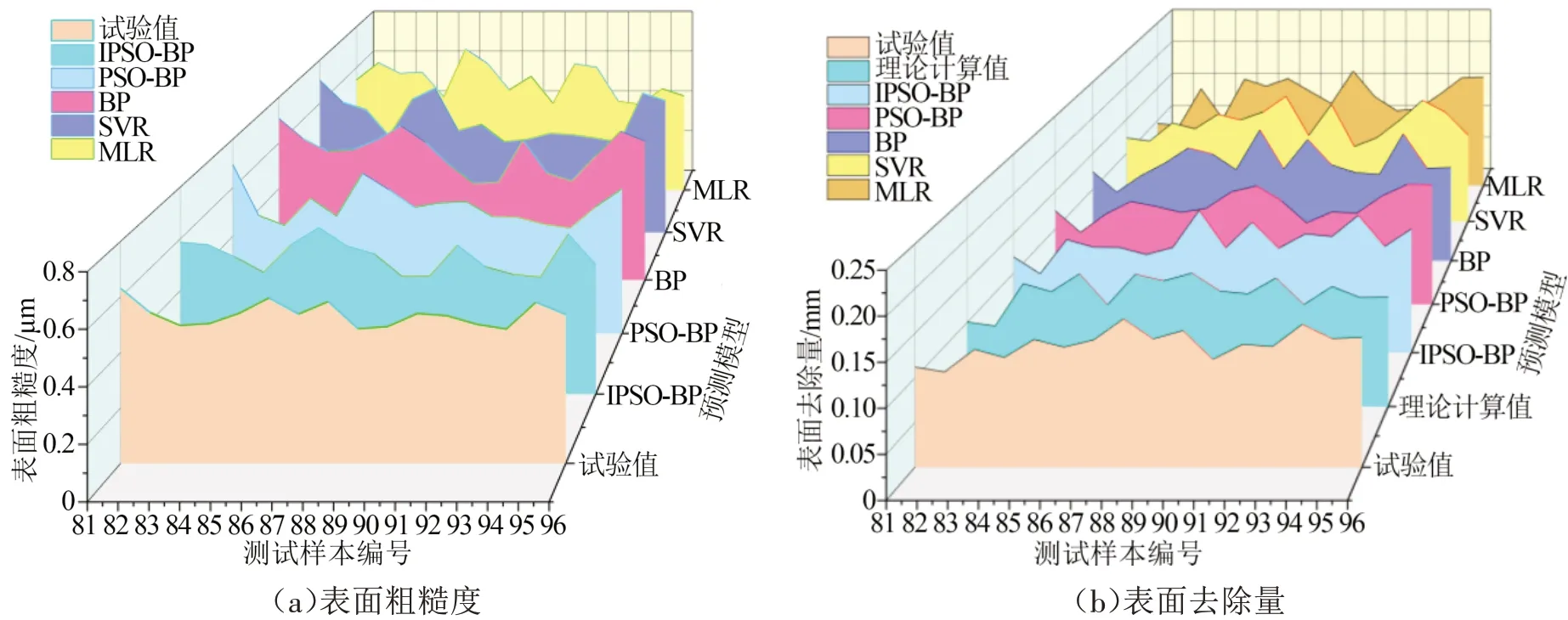
圖13 常規預測模型預測結果對比
利用MAE、MAPE、MSE、RMSE、SMAPE 等誤差指標對預測模型進行對比分析,對比結果如圖14以及表8、表9 所示,相比于常規預測模型,基于IPSOBP 方法的預測模型誤差評價指標更小,對比IPSOBP 和BP 兩種方法可以得出結合IPSO 算法與BP 模型的表面拋光質量預測模型具有更高的預測精度;對比IPSO-BP 和PSO-BP 兩種預測方法可以得出通過對PSO 算法耦合混沌理論、動態權重、動態學習因子和高斯變異方法可以進一步提高算法的全局尋優能力,保證了預測模型的精度。與SVR、MLR方法相比,IPSO-BP 方法的誤差指標同樣最小,進一步表明基于IPSO-BP方法搭建的預測模型在預測拋光表面粗糙度和表面去除量問題上優于常規預測算法。
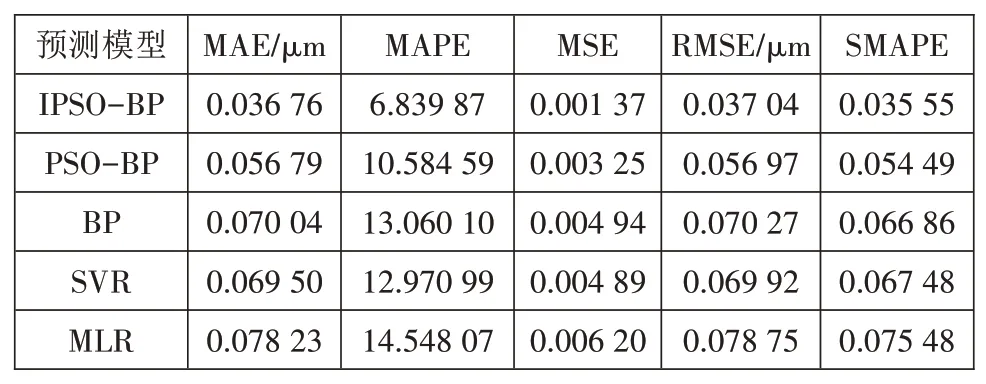
表8 表面粗糙度預測結果分析
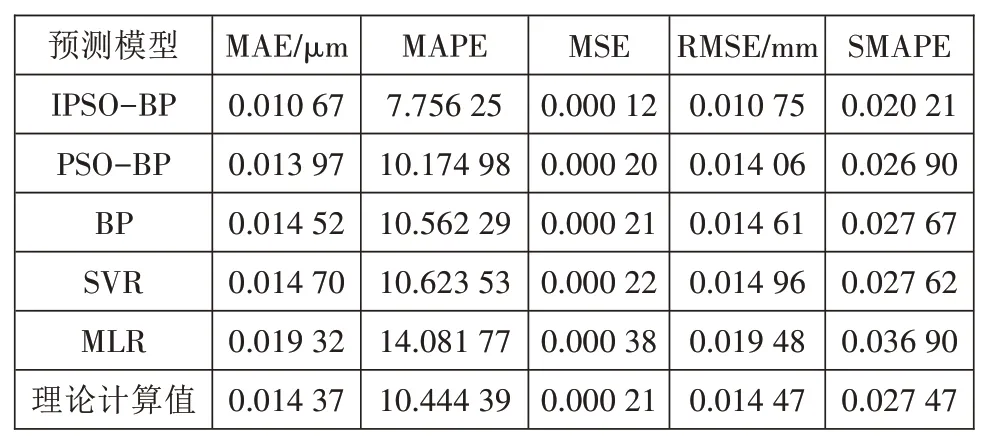
表9 表面去除量預測結果分析
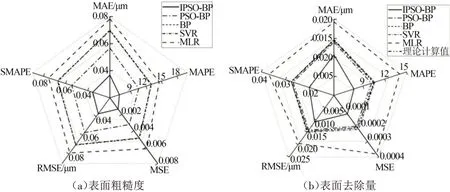
圖14 預測模型評價指標對比分析
綜上所述,構建的基于IPSO-BP 模具零件表面拋光質量預測模型具有預測精度高、尋優速度快等特點,可以用于模具自動化拋光工藝調試階段,實現對模具零件表面拋光質量的快速預測,縮短模具自動化拋光工藝調試周期,降低拋光工藝調試成本。
4.3 基于NSGA-II算法多目標優化
NSGA-II 是在遺傳算法的基礎上引入了快速非支配排序、聚集距離排序和精英策略理念[18],其根據個體水平分層,利用非支配解集中解的秩升序排序,具有算法復雜程度低、全局尋優能力強、收斂性好等特點。采用IPSO-BP-NSGA-II 方法實現對模具零件表面拋光預測模型中拋光工藝參數的優化求解,主要流程如下。
(1)建立多目標優化模型。根據模具零件表面拋光質量預測模型的數學模型,將拋光后表面粗糙度Ra和表面去除量S作為優化目標,多目標優化模型可以表示為:
(2)建立約束條件。約束條件是模具拋光過程中各工藝參數水平的取值范圍,由拋光工藝參數調試經驗和彈性磨頭參數型號決定,各工藝參數的約束條件為:
(3)最小值目標優化。采用最小值求解法優化各工藝參數,對表面去除量目標函數取反,最終多目標優化模型可以表示為:
其中,φ、η表示權重因子。
基于NSGA-II算法對模具零件表面拋光工藝參數進行優化,種群大小為200,迭代次數為300,適應度函數偏差為0.001,優化后的工藝參數如表10所示。

表10 優化后工藝參數組合
將基于NSGA-II算法得到的最優工藝參數進行模具零件拋光試驗,拋光后模具零件表面粗糙度和表面去除量如表11所示。
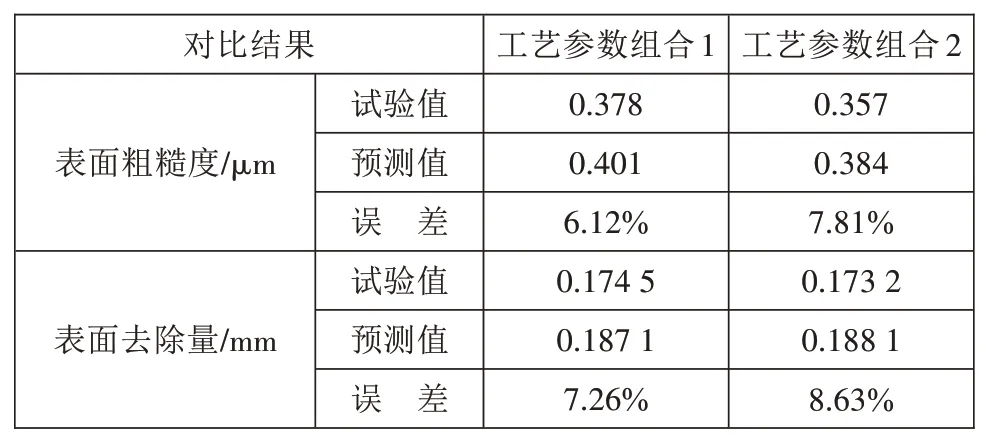
表11 優化后拋光試驗結果及預測結果
為驗證工藝參數優化后模具零件表面拋光質量的提升效果,從樣本數據中選取表面質量較優的第96 組樣本與上述第2 組樣本進行對比,發現優化后拋光工藝參數得到的表面粗糙度降低63.3%,表面去除量增加3.9%。使用優化后的工藝參數對模具零件表面進行拋光,拋光效果如圖15所示。
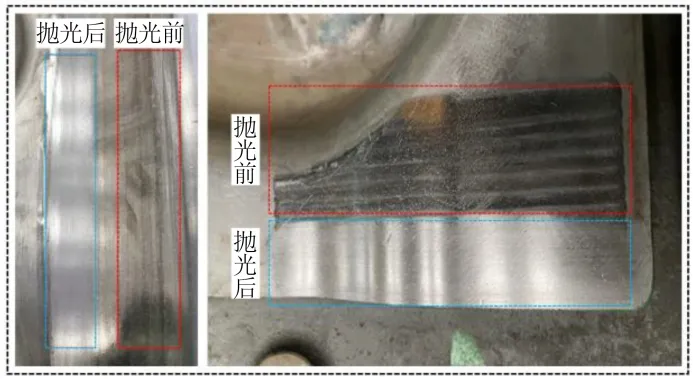
圖15 拋光后模具零件表面
5 結束語
為了預測模具零件拋光后的表面質量,同時優化拋光工藝參數,基于改進后的BP神經網絡模型提出了一種模具零件拋光后表面質量預測方法,結合NSGA-II 算法建立了多目標優化模型,實現了對模具零件拋光參數的優化,主要內容和成果如下。
(1)將混沌理論、動態權重、動態學習因子和高斯變異方法與PSO 算法耦合,提出了改進粒子群尋優算法IPSO,用于改進BP 模型中權值和閾值的更新策略。
(2)基于IPSO-BP 算法搭建了模具零件拋光表面質量預測模型,實現了對模具零件拋光后表面粗糙度和表面去除量的精準預測。
(3)將IPSO-BP 方法與常規預測方法進行對比分析,結果表明基于IPSO-BP 方法的預測模型預測精度更高、收斂速度更快。
(4)基于IPSO-BP-NSGA-II 方法對模具零件表面拋光工藝參數進行優化,建立多目標優化模型,利用優化后的工藝參數對模具零件表面進行拋光,結果表明優化后模具零件表面粗糙度降低63.3%,表面去除量增加3.9%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年6期)2020-01-06 07:45:54
世界農藥(2019年2期)2019-07-13 05:55:12
光學精密工程(2016年6期)2016-11-07 09:07:19
