某型飛機“H”燈燃亮現象解析
2023-10-31 08:25:36李東起楊寶華鄧其聯徐承強王天浩空裝駐大連地區軍事代表室大連長豐實業總公司948部隊
航空維修與工程 2023年10期
■ 李東起 楊寶華 鄧其聯 徐承強 王天浩/ 空裝駐大連地區軍事代表室 大連長豐實業總公司 948 部隊
0 引言
某型飛機電傳系統結構復雜,涉及53 個LRU 部件,為保證維護性設計了自檢系統。電傳系統的地面檢查是通過電傳檢查控制盒上的邏輯開關產生激勵信號,發送到表決器與理論值進行比較,以判定電傳系統性能。這種方法可以檢查表決器和電傳系統的良好性。
1 故障現象
某型飛機進行電傳操縱系統地面檢查時,發現接通電傳檢查控制盒上S2開關后,向下按壓S1 開關時,電傳檢查控制盒上“H”燈燃亮后不熄滅。該項檢查中要求向下按壓S1 時電傳檢查控制盒上的“H”信號燈應燃亮后熄滅。故障出現時,觀察方向舵面有回中趨勢。
2 故障分析
2.1 航向通道的組成及操縱原理
該型飛機航向通道控制方向舵同步偏轉,根據電傳操縱指令或利用腳蹬機械系統偏轉方向舵,電傳操縱系統的執行機構能使方向舵偏轉±18°。濾波后的側向桿位移信號經P(靜壓)、q(動壓)、α(迎角)修正后進入累加器,與自動駕駛來的信號及過載限幅器一起形成舵機伺服機構的操縱信號,進入舵傳動機構,對方向舵進行同步操縱。為了提高航向的操縱性和穩定性,引入了nz(側向過載)、ωy(航向角速度)兩個反饋。當出現航向電傳通道故障時,可由飛行員通過“航向阻尼”開關斷開電傳通道(見圖1)。
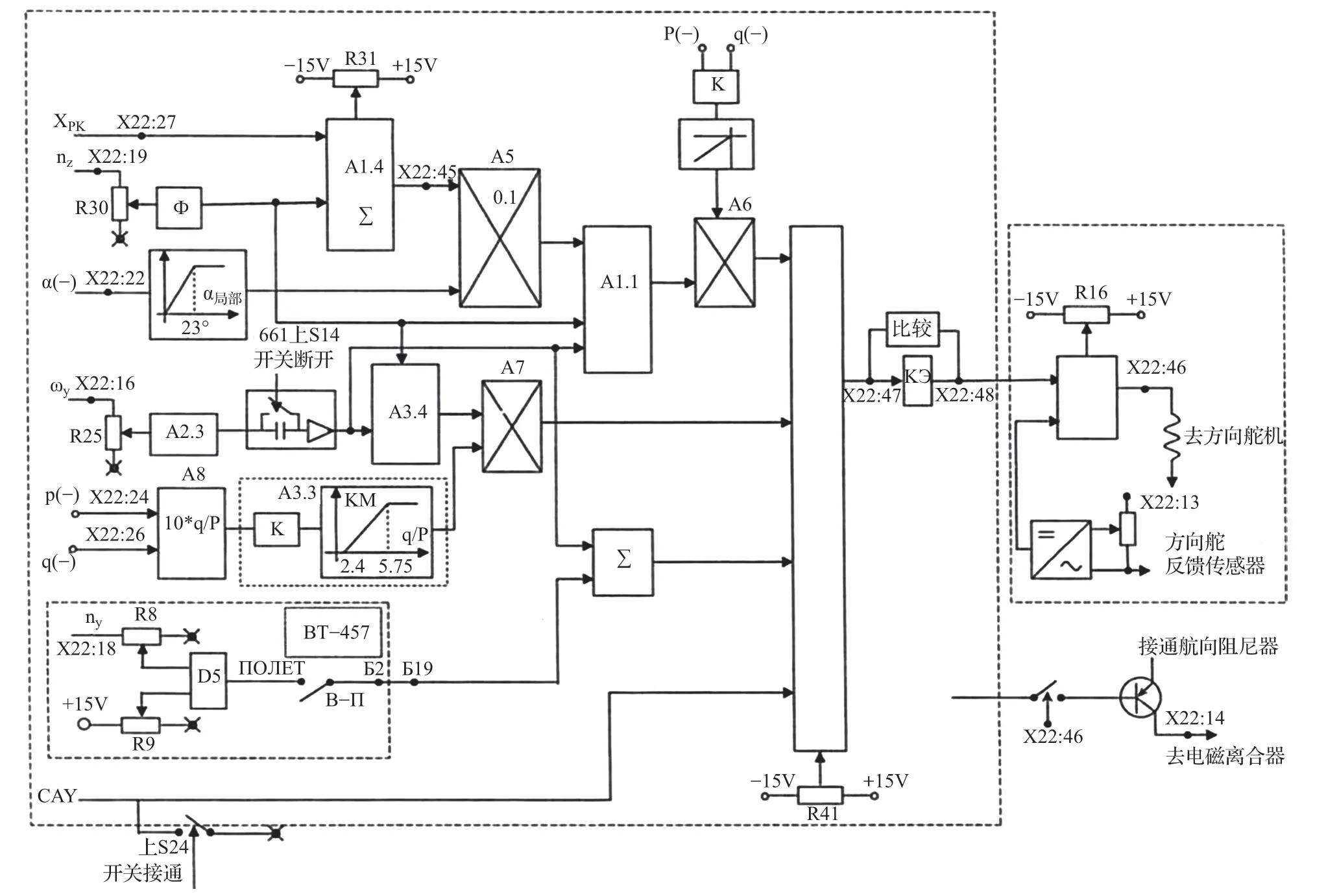
圖1 航向通道原理圖
2.2 航向通道附件的主要功能
1)橫向桿位移傳感器:將飛行員操縱駕駛桿的橫向位移變換為電信號,作為電傳系統的控制指令,傳輸至電傳計算機。
2)航向角速度傳感器ωy:測量飛機沿y軸的角速度,并輸出直流電壓信號,其值正比于飛機角速度,而符號取決于角速度作用方向。
3)側向過載傳感器nz:加速度計獲取敏感測量軸方向的線加速度,并輸出直流電壓信號,其值與作用于測量軸的線加速度成正比,而符號取決于線加速度作用方向。
4)動、靜壓傳感器:接收大氣靜壓、動壓信號,變換后輸出與靜壓、動壓成正比的電信號,供給電傳控制系統作為調參信號。
5)電傳計算機:接收自動控制和駕駛桿位移信號及傳感器信號,形成舵面操縱指令。同時對輸出信號進行均值表決,選擇正確信號輸出。
6)舵機:在電動液壓部件內將計算機輸出的電信號轉變為活塞桿的直線運動,從而帶動飛機舵面運動。
2.3 電傳檢查控制盒
電傳檢查控制盒上開關S1 用于確定試驗信號的極性,通過向上和向下按壓改變信號極性。開關S2 為操縱臺提供+27V 電源。開關S3 共有18 個波段位置,用于向傳送試驗信號的程序裝置提供代碼指令(自檢測系統邏輯見圖2)。當開關S2 接通、波段開關S3 斷開時,系統處于功能檢查狀態。通過三位置自動回中,開關S1 通過向上和向下按壓,向角速度傳感器和線加速度傳感器的力矩給定器發出不同的極性檢測信號,同時,動、靜壓傳感器施加試驗偏置信號,迎角傳感器施加風標轉動激勵信號。計算機通過對傳感器施加偏轉力矩、對表決器直接施加輸入信號進行故障模擬,以對電傳系統的自我監控能力進行檢查。本次故障信號燈“H”用于自檢時顯示方向舵控制舵面回中過程,指示方向舵的情況。
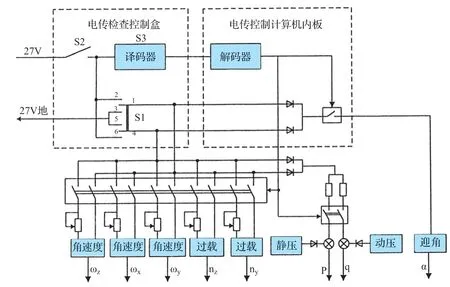
圖2 自檢測系統邏輯圖
2.4 信號燈“H”燃亮條件
信號燈“H”燃亮條件為:
1)電傳檢查控制盒上S2 接通。
2)電傳檢查控制盒上S1 向上或向下按壓,且方向舵機搖臂反饋傳感器輸出的感應電壓在(3.3±1.8)V。
2.5 “H”燈燃亮分析
接通電傳檢查控制盒上S2 電門,+27V 直流電使繼電器K1 工作(見圖3),電傳檢查控制盒上X1 插頭中來自方向舵機搖臂反饋傳感器的感應電壓進入全波整流電路。方向舵校正傳感器輸出信號與方向舵機的搖臂拉桿位置成線性關系,拉桿位置變化引起傳感器激磁線圈和感應線圈之間的磁通變化,從而在感應線圈上產生與拉桿位置成比例的交流電(舵面在中立位置時電壓為零)。只有在啟動地面檢查時,方向舵偏轉后,校正傳感器才有交流信號輸出,本架飛機測量時發現方向舵校正傳感器輸出的電壓大于2.3V 時“H”燈才會燃亮。
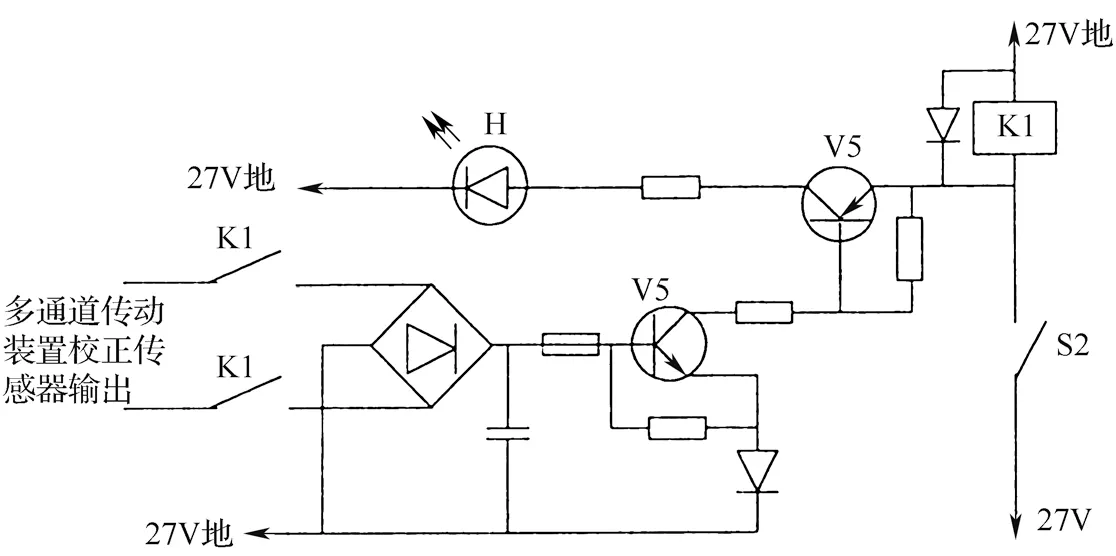
圖3 方向舵中立信號燈電路
2.6 故障排查
1)本機試驗數據
根據本架飛機測試數據,接通電傳檢查控制盒上S2 開關后,向下按壓S1開關時,電傳檢查控制盒產生角速度、過載等激勵信號,激勵信號進入電傳計算機的航向通道,解算后控制方向舵機,通過液壓作動筒使方向舵偏轉,偏轉后向中立位置運動,當方向舵向中立位置運動至左偏約3°以內、測試電壓在2.3V以下時,“H”燈應熄滅。未啟動地面檢查時,方向舵停止運動,方向舵回到中立位置最佳角度,但啟動地面檢查后,方向舵偏轉,向中立位置運動時未能回到左偏約3°范圍內,測量舵機校正傳感器的輸出信號電壓為2.4V,因此“H”燈燃亮。
2)調整參數
使用電傳操縱系統檢查儀檢查航向通道參數,在正常操縱狀態下航向計算機輸出電壓參數均符合要求,且工作在最佳工作狀態。為了使該架飛機啟動地面檢查時方向舵停止運動后位置在左偏約3°范圍內,即校正傳感器交流電壓輸出小于2.3V,需對地面檢查狀態下航向控制通道參數進行調整,并保證正常操縱狀態下航向控制通道參數符合工藝要求。通過調整動靜壓、側向過載、航向計算機輸出電壓和方向舵舵機控制信號參數(調整電位計見圖1),使正常操縱狀態下方向舵中立位置為0.2°(調整前后數據見表1),接近技術指標的極限位置。再次進行試驗,接通電傳檢查控制盒上S2 開關后,向下按壓S1 開關,方向舵偏轉后向中立位置運動并停留在左偏約2.8°位置,此時測量校正傳感器交流電壓輸出為2.25V,“H”燈熄滅,但熄滅過程為亮→滅→亮→滅,出現了閃亮情況,仍然不符合燃亮后熄滅的技術標準。另外,調整后正常操縱方向舵時方向舵中立位置約為0.2°,雖接近極限值,但也不是最佳工作狀態。
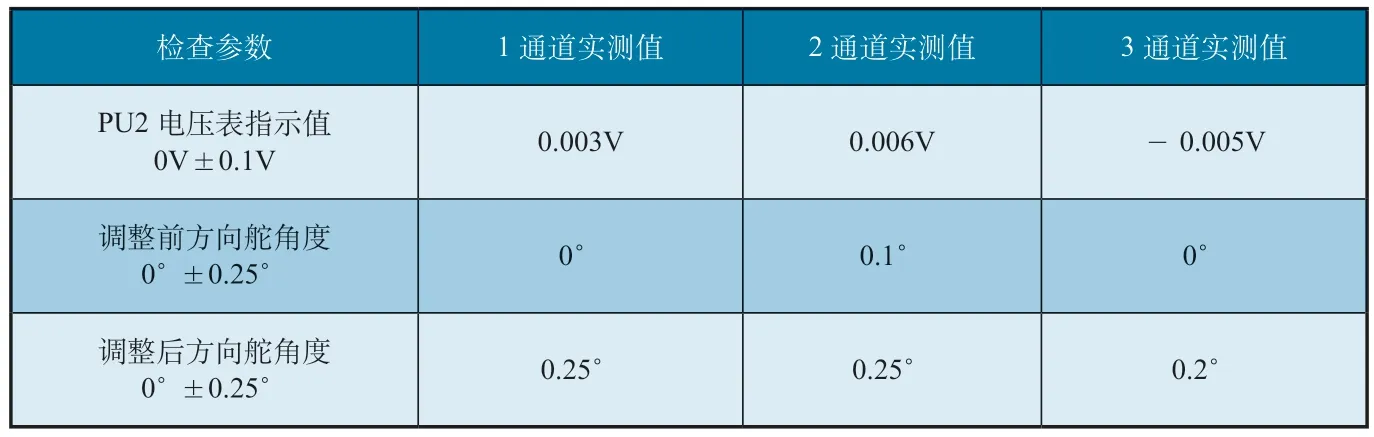
表1 調整前后方向舵伺服裝置參數
2.7 信號燈“H”狀態分析
1)信號燈“H”長亮:表明方向舵機搖臂反饋傳感器輸出的感應電壓大于2.3V。
2)信號燈“H”熄滅:表明方向舵機搖臂反饋傳感器輸出的感應電壓小于2.3V。
3)信號燈“H”閃亮:表明方向舵機搖臂反饋傳感器輸出的感應電壓在2.3V 的臨界點。
需要說明的是,以上數據為本機試驗數據,不同飛機會有不同的參數。
2.8 故障影響
電傳檢查控制盒僅在地面檢查時發出測試電壓,其大小并不對系統性能產生影響,“H”燈僅在地面檢查時用于顯示方向舵的偏離情況,地面檢查結束后需斷開電源,蓋好保護罩,不再使用。該架飛機關閉電傳檢查控制盒上S2 開關后進行電傳系統檢查,航向通道操縱系統工作均正常,方向舵中立位置在最佳工作狀態的0°左右(電氣和機械零位重合)。
3 結論
通過理論分析和實際驗證,如要達到該型飛機地面檢查狀態技術要求規定的“S1 向下按壓時,電傳檢查控制盒上的‘H’信號燈應燃亮并熄滅”,需要降低電傳操縱系統航向通道的技術指標,但指標調整到極限位置后部分飛機出現閃亮、部分飛機出現長亮的情況,依然不符合燃亮并熄滅的技術標準。鑒于該指標僅在地面檢查測試時發出測試電壓,不影響系統性能,向設計部門提出更改文件的需求,獲得設計部門同意,將該項技術指標修訂為“向下按壓電傳檢查控制盒上S1 時,‘H’信號燈應燃亮并熄滅,或燃亮后不熄滅,但此時觀察方向舵面應有回中趨勢”。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25