智能機器人超聲檢測系統研制
2023-11-05 06:38:18楊蘊鴻馬小懷霍子軍江立新李宏輝王雙元
科技創新與應用 2023年30期
楊蘊鴻,馬小懷,徐 哲,霍子軍,江立新,張 辰,李宏輝,王雙元
(寶雞鈦業股份有限公司,陜西 寶雞 721014)
無損檢測的常規方法有超聲探傷、磁粉探傷、滲透探傷和渦流探傷等,由于超聲波探傷具有探測距離大、耦合效果好、檢測速度快及探傷裝置體積小等優點,已成為鈦材質量檢測必不可少的手段。但超聲波探傷檢測結果的可靠性影響因素是多方面的。超聲波探傷儀器存在結果顯示不直觀、判斷探傷結果難、探傷結果數據無記錄、對人員素質要求高和人為因素影響大等許多缺點,嚴重影響超聲波檢測的可靠性。
隨著智能化時代的來臨,智能技術為相關產業的轉型升級提供了有力支撐。作為其關鍵核心技術之一的智能機器人技術,可以將機器人執行機構與智能化控制、分析軟件系統相結合,在諸多領域實現代替或協助人類完成工作,是工業及非產業界的重要生產和服務性設備,也是先進制造技術領域不可缺少的裝備。
為此,本文將智能機器人小車,集成超聲檢測、控制系統的工作單元應用在工業化生產中,取得了很好的應用效果,實現了板材超聲檢測的自動化和智能化,保證了板材超聲波探傷檢測過程的全覆蓋及探傷檢測機構數據記錄的完整性。
1 智能機器人結構框架及運行原理
1.1 結構框架
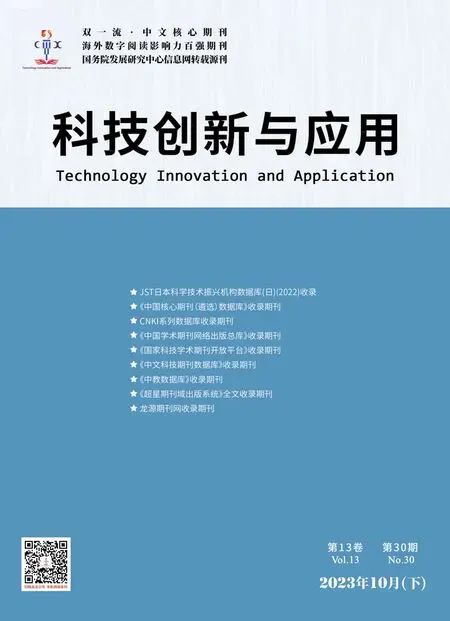
為了提高檢測效率,同時又保證檢測效果,智能機器人超聲檢測系統包括智能機器人主體。智能機器人主體下方固定連接多驅履帶系統,在智能機器人主體前方固定連接前直線模組,前直線模組設有前滑臺,前滑臺上連接前超聲探頭模塊;在智能機器人主體后方固定連接后直線模組,后直線模組設有后滑臺,后滑臺上連接后超聲探頭模塊。其結構如圖1 所示。
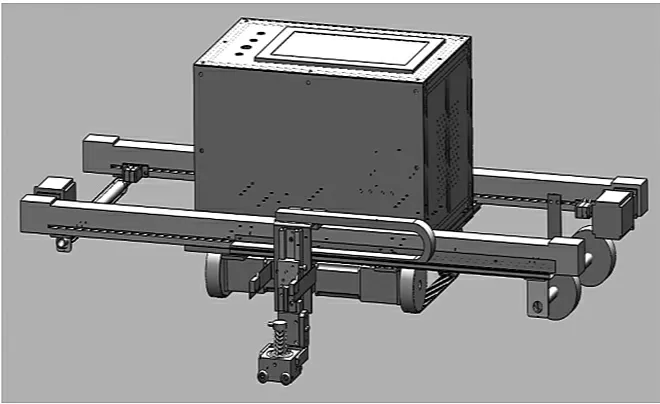
圖1 機器人小車結構圖
機器人小車內安裝用于控制探傷機器人工作的各種設備,包括一體機、驅動器、蓄電池、空開和開關等。一體機可以控制探傷機器人、調節設備參數、調節掃描速度和掃描間距等。一體機屏外側按鈕可控制啟停點位及手動操作。電池可保證探傷機器人在無電源情況下工作,并且可拆卸充電,使探傷機器人可以不受電源限制使用。電控箱側面設有機器人電源開關和充電口,方便使用和對設備充電。
探頭夾具用于安裝探頭,由軸套、滑套、探頭螺母、彈簧和加工件等組成。該夾具保留探頭單個方向的自由度,在水平方向上可自動上下微調,探頭垂直度的調節利用支架固定孔調整,在板材探傷過程中,根據板材高低的起伏,探頭根據板材同時進行浮動,在一定范圍內可以穩定探傷波形,保證探傷效果。
多驅履帶系統用于驅動機器人X 方向移動(前進、后退)。使用2 條機器人人字帶組成的多驅動履帶系統,進一步增加機器人移動的抓地力和穩定性,防止掃查過程中機器人跑偏。其結構如圖2 所示。
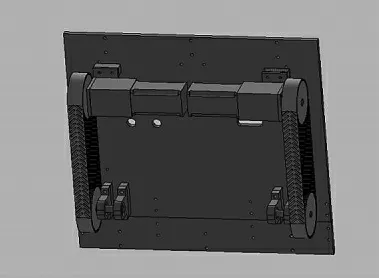
圖2 機器人小車多驅履帶系統結構圖
1.2 運行原理
智能機器人超聲檢測系統模擬人工探傷工作方式,使超聲探頭垂直于板材表面進行探傷,通過安裝在機器人小車上的特殊探頭夾具固定探頭,利用夾具調整探頭與板材的垂直角度,探頭夾具具有多方向浮動的功能,保證探頭垂直接觸于板材表面時隨著板材平面高低及傾斜浮動。工作時機器人小車放置在待探傷板材表面,探頭在機器人兩軸系統的帶動下,進行X 向和Y 向移動,先X 向掃描指定長度,然后Y 向向前移動設定距離,繼續X 向掃描指定長度,依次循環掃描,使探頭無縫掃查板材表面,并通過計算機系統即時分析記錄數據,實現板材智能檢測。機器人小車運行軌跡如圖3 所示。
圖3 機器人小車運行軌跡圖
1.3 使用方法
把機器人放置到待檢測板材的端頭開始探測,調整探頭夾具使探頭至合適位置,打開電源開關,點擊啟動按鈕,手動控制探頭在標準板上移動,檢查標準傷的波形高度,確認波形是否正確,增益是否達到要求。若波形不正常手動調整,等待波形確認完成后,開始檢測板材,使探頭走到左側板材邊沿,按下開關確定左極限位置,使探頭走到右側板材邊沿,再確定右極限位置,然后點擊自動探傷按鈕,使探傷機器人自動工作。當一道掃描結束后,翻轉掃查機器占用的地方,先將探頭回零,輸入“起點坐標”(此時因機器方向翻轉起點坐標在O1位置),掃查完成后,再將小車移至第二道掃查起點坐標O2),依次完成整塊板材掃查。待探傷機器人掃完整個平面后,關閉電源,收回機器人。
2 控制系統及軟件設計
2.1 控制系統
智能機器人超聲檢測系統,由機器人小車探傷執行系統和上位機智能化控制分析系統組成,兩系統間采用無線網絡進行數據通信。
上位機選用便攜式計算機,運行智能化控制分析軟件,顯示超聲探傷回波(A 掃描)及板材掃查結果圖像(C 掃描),對探傷儀發送的波形數據做原始記錄并進行智能化分析,以直觀的圖示輸出探傷結果,指示缺陷位置等信息,還可以輸出合格和不合格報警信息,探傷至板材邊緣后自動返回。控制器接收上位機的命令及按鈕與邊緣檢測光電開關等信號,控制探頭Y 及小車X 驅動器和報警信號輸出等。驅動器接收控制器發出的脈沖指令,并以脈沖指令驅動電機。電機及編碼器帶動探頭和小車的運動,編碼器將探頭和小車的運動信息以脈沖信號反饋給超聲波探傷儀,超聲波探傷儀將信號通過網絡傳送上位機,上位機根據脈沖信號完成小車位置計算。超聲儀器驅動超聲探頭,接收探頭回波信號及編碼器信號,并將其信號發送給上位機。圖4為控制系統拓撲圖。
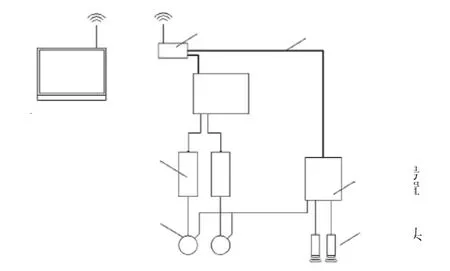
圖4 控制系統拓撲圖
2.2 操作面板
系統在設計上靈活地結合了面板的簡潔操作功能與軟件的豐富參數設置和控制功能,在手動模式下簡單操作即可應對隨意性的工況作業,在軟件上進行系統性的設置也可應對大批量重復性的繁重作業。圖5為操作面板示意圖。
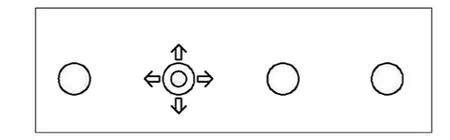
圖5 操作面板示意圖
確認按鈕:確認機器工作原點。方向按鈕:左控制探頭向左,右控制探頭向右,前控制機器向前,后控制機器向后。邊緣報警燈:當光電開關檢測到邊緣或探傷結束時報警。停止:停止探頭及機器的運動。
2.3 軟件設計
軟件系統運行在PLC 和嵌入式觸摸屏工控機上,PLC 中運行與小車運動控制相關的智能算法,如自動糾偏算法等,嵌入式觸摸屏工控機用于人機交互,運行小車控制圖形界面、參數設置、探傷結果智能分析顯示等界面。在界面中調整各項探傷參數,如閘門位置、數量、長度,探傷增益和延遲等,具體參數根據探傷要求設置。
C 掃顯示可依據板材及要求設定好X 軸的“速度”“步進”“掃查長度”及Y 軸的“速度”“掃查寬度”,以及C 掃色卡等參數,執行超聲掃描。掃描過程中,超聲儀器將接收探頭回波信號及編碼器信號,發送至上位機,上位機依據編碼器反饋的位置信號,將回波數據A 門的傷波高度轉化C 掃色卡對應的顏色,繪制到C 掃顯示對應的坐標中。不同的顏色代表不同傷波高度,默認紅色為嚴重缺陷。圖6 為機器人小車控制界面和探傷波形監測C 掃繪制界面圖。
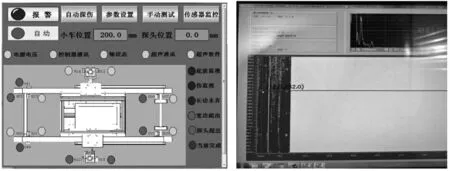
圖6 機器人小車控制界面圖(左)和探傷波形監測C 掃繪制界面圖(右)
工作模式切換為自動時,探頭從原點移動到“掃查寬度”所設定寬度的距離后,探傷機器人向前移動一個“步進”距離,然后探頭再反向移動“掃查寬度”所設定寬度距離,依次運動,直至到達所設的“掃查長度”停止并報警提示“終點到達”。
中途可按“停止”按鈕停止,當光電開關檢測到邊緣信號后立即停止,并報警提示。
同時超聲儀器將接收探頭回波信號及編碼器信號。
3 關鍵點及解決途徑
3.1 探頭浮動裝置研發
探頭浮動裝置是智能機器人超聲檢測系統重要零部件,用于夾持固定超聲探頭,以恒定壓力與垂直角度接觸被檢測板材表面執行掃查。該裝置需要能適應板材表面的輕微不平整情況。
3.2 超聲波檢測耦合效果的保證和垂直入射的控制
在耦合效果方面,采用了補水系統自動補水的方式,保證超聲探頭與被檢板材表面之間有水膜耦合。
垂直入射方面,通過對探頭浮動裝置的精密加工與裝配,以及對掃查速度的精確穩定控制,確保了超聲信號的垂直入射。
3.3 系統便捷與輕量化的實現
智能機器人小車主體框架使用鋁型材組裝,大幅降低了系統整體重量;在2 個直線模組之間一端安裝一對輔助移動滾輪,另一端安裝搬運提手,使得智能機器人小車在板材上搬運放置時更加輕便;采用鋰離子電池供電系統,使智能機器人小車工作時無須提供外部連接電纜;還配有搬運液壓車,更加方便智能機器人小車的擺放與回收。
3.4 動態掃查過程中,檢測結果可靠性的保證
超聲儀器選用汕超系列探傷采集器。該系列儀器超聲數據采集、數模轉換、多通道控制卡均采用國際先進的集成電路技術,操作簡單,功能強大。智能機器人上安裝機器人人字帶,構成多驅履帶系統,并通過合理布局,提高智能機器人小車運動穩定性,綜合保障了檢測結果的可靠性。
3.5 運動軌跡算法及可視化顯示的研發
運動軌跡算法,核心包括自動尋邊算法與大步距掃查算法,前者保證了智能機器人小車運動過程中不跑偏,后者提高了檢測效率;可視化方面,設計了小車控制界面,以及A 掃、C 掃顯示界面,實現全圖形化操作。
4 超聲檢測效果測試
使用具有Φ1.2 mm 平底孔的試塊(平底孔直徑1.2 mm),進行檢測靈敏度測試,顯示結果清晰準確。采用5 MHz 頻率、晶片直徑0.5 英寸(1 英寸等于2.54 cm)的超聲波探頭,檢測板材試塊上埋深為3 mm 的平底孔,波形達標。在接近開關和掃查軸運動控制軟件配合下,進行板材盲區檢測測試,可檢測到板材邊部。
5 結束語
將智能機器人技術運用到超聲探傷領域,具體地說是鈦板材超聲探傷領域,通過網絡檢索尚未查找到有相關類似項目案例。本項目開創了先例,通過創新應用高新技術,為企業板材產品超聲檢測工作帶來了新的轉變與提升。
本項目研發的智能機器人超聲檢測系統,其各組成部分、主要零部件、軟件算法,也具有高度創新性。例如探頭浮動裝置,通過精心設計與精密裝配,保證了探頭超聲波的垂直入射;由邊緣檢測光電傳感器結合智能尋邊算法組成的自動尋邊系統,保證了智能機器人在運動過程中不會跑偏;雙直線模組雙探頭結構,結合大步距掃查算法,不僅成倍提升了檢測效率,還消除了邊緣檢測盲區;還有眾多細節方面的創新設計,如鋰離子電池供電系統,自動補水系統等。總的來說,智能機器人超聲檢測系統是一個由眾多創新性設計子系統組成的整體。
項目將智能機器人應用于超聲檢測領域開創了先例,現設計方案在檢測通道數量、掃查速度、掃查算法等方面仍具備提升優化潛力,未來可在此基礎上研發更多通道、更快速度、更高智能化程度的超聲檢測系統。
通過創新應用新一代信息技術,能切實解決當前實際問題,將工作方式從現有的手動檢測提升為自動化智能化檢測,給企業板材產品超聲檢測工作帶來了新的轉變與提升,同時為智能機器人等新一代信息技術在企業的應用起到良好的示范效應,也為未來其他智能機器人應用項目提供了更多的經驗與思路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32