基于TypeB 卡閱讀器的數(shù)字解調(diào)算法
2023-11-05 06:38:24陳俊凝
科技創(chuàng)新與應(yīng)用 2023年30期
關(guān)鍵詞:信號(hào)
陳俊凝
(西北大學(xué) 信息科學(xué)與技術(shù)學(xué)院,西安 710127)
非接觸式IC 卡系統(tǒng)由鄰近卡(PICC)和近耦合設(shè)備(PCD)組成[1],兩者通過無線通信來完成信息傳輸。然而,PCD 解調(diào)誤差大、速度慢,將出現(xiàn)系統(tǒng)無法正確通信的問題。解調(diào)能力提升,不僅可以發(fā)揮PICC 芯片性能優(yōu)勢(shì),還能夠提升自身的可靠性和安全性,這對(duì)系統(tǒng)的運(yùn)行起到關(guān)鍵性作用[2]。
對(duì)于符合ISO/IEC 14443[3]TypeB 標(biāo)準(zhǔn)的PICC,其發(fā)送給PCD 的數(shù)字信息也是被附加在847 kHz 的副載波上的,再利用負(fù)載調(diào)制將雙重載波發(fā)送給PCD,波特率為106 kbps。簡而言之,就是通過106 kbps 的數(shù)字信號(hào)對(duì)847 kHz 的副載波信號(hào)進(jìn)行二進(jìn)制相移鍵控(BPSK)調(diào)制,根據(jù)協(xié)議規(guī)定,采用連續(xù)8 個(gè)周期初始相位固定的副載波信號(hào)來表示“0”,“1”則用與初始相位相差為連續(xù)8 個(gè)周期的副載波信號(hào)表示[4]。
1 BPSK 相干解調(diào)關(guān)鍵技術(shù)
BPSK 調(diào)制利用載波信號(hào)的相位信息調(diào)制,包絡(luò)檢波無法檢測(cè)到相位變化,因此采用相干解調(diào)方式更為理想[5]。特別是在PICC 和PCD 進(jìn)行信息交互時(shí),由于信號(hào)較弱,再加上外界干擾,信號(hào)在傳送過程中很容易產(chǎn)生偏差,導(dǎo)致本地振蕩產(chǎn)生的相干載波不能嚴(yán)格實(shí)現(xiàn)同頻同相,并且大大影響了解調(diào)性能,因此在接收端實(shí)現(xiàn)載波同步非常重要[6]。
本文對(duì)傳統(tǒng)解調(diào)算法進(jìn)行了深入研究,結(jié)合實(shí)際工程的需要,針對(duì)BPSK 相干解調(diào)過程中的載波同步、碼元同步等關(guān)鍵技術(shù)進(jìn)行研究與實(shí)現(xiàn),并且提出了優(yōu)化方案加以對(duì)比分析。
2 載波同步
2.1 傳統(tǒng)Costas 環(huán)路原理
鎖相環(huán)在調(diào)制解調(diào)中發(fā)揮著重要作用[7],其是一種典型的反饋控制電路,能夠鎖定相位[8]。
然而傳統(tǒng)鎖相環(huán)技術(shù)對(duì)本地時(shí)鐘頻率要求較高,在跟蹤載波時(shí)無法有效糾正較大頻偏,也不適合寬率范圍內(nèi)的基帶碼元同步。
Costas 環(huán)[9]基于鎖相環(huán)原理,其原理框圖如圖1所示。
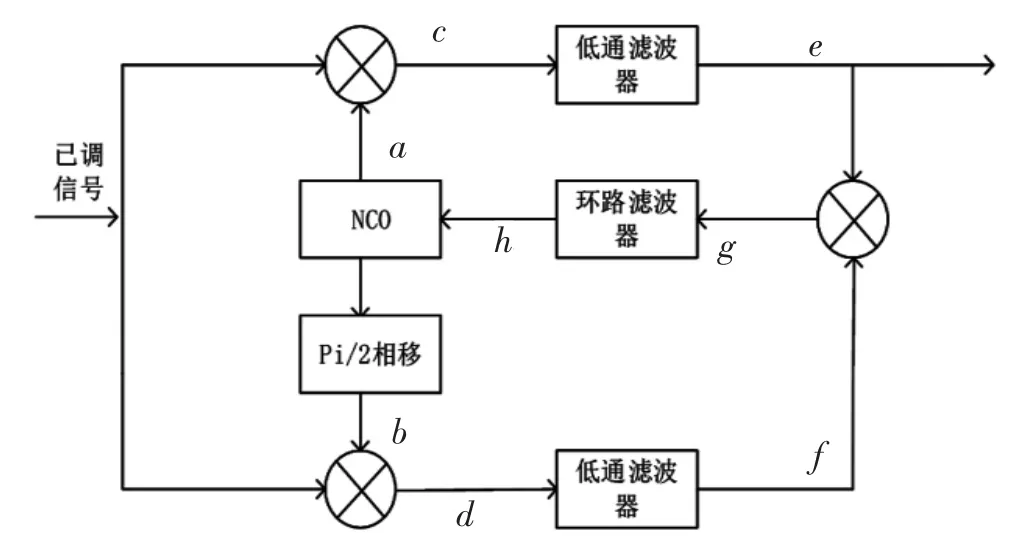
圖1 Costas 同步環(huán)路原理框圖
BPSK 信號(hào)被送入兩路相乘器,與壓控振蕩器產(chǎn)生的a、b 兩點(diǎn)電壓相乘,得到c、d 兩點(diǎn)電壓,分別經(jīng)過低通濾波器后相乘得到環(huán)路濾波器的輸入電壓vg為
式中:m(t)為調(diào)制信號(hào),φ-θ 為本地信號(hào)與載波信號(hào)的相位差。對(duì)于BPSK 信號(hào)而言,m(t)=±1,并且在φ-θ 很小時(shí),sin(φ-θ)=φ-θ,那么式(1)便可改寫為
這時(shí)vg通過環(huán)路濾波器間接控制數(shù)控振蕩器的頻率,環(huán)路濾波器的作用就是低通,僅允許vg中的直流分量通過,數(shù)控振蕩器(NCO)受到電壓控制后調(diào)整頻率不斷使φ-θ 盡可能變小,直到它減小為0 時(shí),就可以得到vg=1/2m(t)。
此時(shí)的電壓和需要解調(diào)出的信號(hào)m(t)只是幅值不同,直接輸出這個(gè)電壓就可以得到近似的解調(diào)結(jié)果。
2.2 基于希爾伯特鑒相的解調(diào)算法原理
傳統(tǒng)的Costas[10]環(huán)解調(diào)效果較為理想,不過其仍然存在某些缺點(diǎn),載波頻率高的時(shí)候,對(duì)濾波器特性要求也就變高,因此在實(shí)際應(yīng)用中,常搭配叉積鑒頻算法[11]來提高效率,實(shí)現(xiàn)起來會(huì)有些繁瑣。本文在Costas 環(huán)法上做了部分改進(jìn),改進(jìn)的結(jié)構(gòu)如圖2 所示。
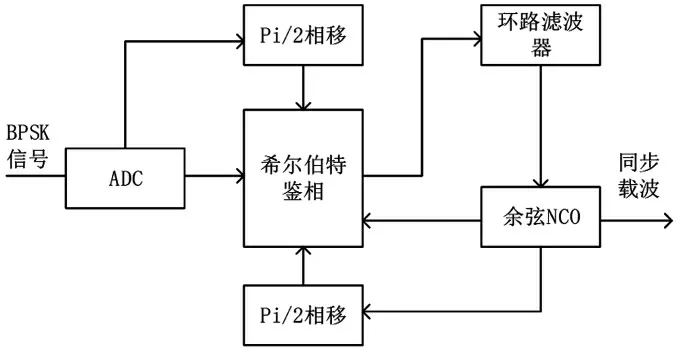
圖2 基于希爾伯特鑒相的解調(diào)原理框圖
希爾伯特鑒相模塊總共有四路輸入信號(hào),與模數(shù)轉(zhuǎn)換器(ADC)采樣后的已調(diào)波和控制余弦NCO 產(chǎn)生的的信號(hào)有關(guān),其中已調(diào)信號(hào)與其90°相移的信號(hào)固定不變,NCO 經(jīng)過環(huán)路不斷調(diào)整生成的余弦波和90°相移后的正弦波持續(xù)進(jìn)入鑒相模塊,這些信號(hào)在模塊內(nèi)部按照算法進(jìn)行數(shù)學(xué)運(yùn)算,得到相位差。計(jì)算過程如下。
設(shè)m為接收端收到的BPSK 調(diào)制信號(hào),mh是調(diào)制信號(hào)移相90°后的信號(hào),α 是余弦NCO 信號(hào),β 是α 經(jīng)過90°相移的信號(hào),ωc是載波中心頻率,△ω 為頻偏,θ是載波的相位差,即
因此可以得到
運(yùn)算結(jié)果便是本地載波與調(diào)制信號(hào)的相位差。
3 位同步
Gardner 算法[12]利用反饋環(huán)路,使得這種算法收斂速率高,運(yùn)算量更小,所以本文選用了Gardner 定時(shí)同步環(huán)路實(shí)現(xiàn)碼元同步,其原理框圖如圖3 所示。

圖3 Gardner 算法原理框圖
傳統(tǒng)Gardner 定時(shí)環(huán)路通常在每個(gè)碼元內(nèi)的采樣點(diǎn)數(shù)較少,不能根據(jù)初始賦值來直接鎖定最佳抽樣時(shí)刻,必須通過內(nèi)插濾波器和NCO 模塊不斷地反饋計(jì)算出最佳采樣點(diǎn)。對(duì)于本文所設(shè)置的參數(shù),采樣頻率明顯超過了碼元速率,可以在每個(gè)碼元內(nèi)取得31 個(gè)采樣點(diǎn),在這些采樣點(diǎn)中,有位于最佳采樣時(shí)刻附近的值。
4 硬件實(shí)現(xiàn)
4.1 載波同步的硬件實(shí)現(xiàn)
載波同步模塊采用Costas 同步環(huán)路由環(huán)路濾波器、NCO 以及希爾伯特鑒相器等構(gòu)成。
對(duì)于環(huán)路濾波器,為了節(jié)省系統(tǒng)的硬件邏輯資源,簡化計(jì)算,在不影響系統(tǒng)正常運(yùn)行、確保誤差在允許范圍內(nèi),對(duì)環(huán)路系數(shù)的小數(shù)部分進(jìn)行數(shù)據(jù)處理,將其轉(zhuǎn)換為近似相等與2 的負(fù)整數(shù)次冪的值,這樣就可以直接采用右移法對(duì)環(huán)路進(jìn)行運(yùn)算。
NCO 模塊主要功能是產(chǎn)生同相的相干載波,然后通過低通濾波器得到數(shù)字基帶信號(hào),可以利用直接數(shù)字式頻率合成器(DDS)原理實(shí)現(xiàn)NCO 功能。在設(shè)計(jì)時(shí),為了減少ROM 占用的硬件資源,只在ROM 中存儲(chǔ)1/4 周期的余弦波對(duì)應(yīng)的值,其他周期的的值通過算法來計(jì)算。
希爾伯特鑒相器由4 個(gè)乘法器、2 個(gè)加法器以及1個(gè)實(shí)現(xiàn)反三角函數(shù)運(yùn)算的CORDIC 算法模塊[13]組成,其結(jié)構(gòu)如圖4 所示。乘法器和加法器采用QuartusⅡ中的IP 核即可生成,CORDIC 算法模塊采用16 級(jí)流水線設(shè)計(jì),將x0、y0和θ=0 導(dǎo)入到寄存器中,利用流水線對(duì)n 個(gè)固定的右移結(jié)構(gòu)實(shí)現(xiàn)n 次迭代,這種結(jié)構(gòu)盡管沒有將邏輯資源的利用率降低,但是采用了較為簡單的右移結(jié)構(gòu),簡化了邏輯結(jié)構(gòu),有效提升了系統(tǒng)的時(shí)鐘性能。此外,采用流水線結(jié)構(gòu)也可以提高算法的運(yùn)行速率,相比直接循環(huán)式結(jié)構(gòu)的實(shí)現(xiàn)方法,速率提高了n倍,是高速系統(tǒng)中的關(guān)鍵點(diǎn)。反三角函數(shù)對(duì)應(yīng)的值存放在ROM 中,可以減少資源占用空間。
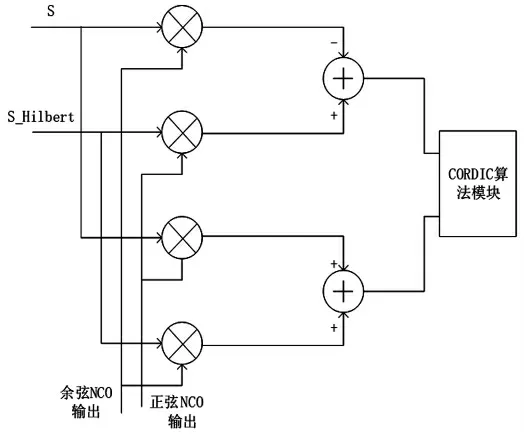
圖4 希爾伯特鑒相算法模塊
4.2 位同步的硬件實(shí)現(xiàn)
本文采用Gardner 定時(shí)同步環(huán)路實(shí)現(xiàn)位同步,由內(nèi)插濾波器、定時(shí)誤差檢測(cè)、環(huán)路濾波器以及NCO 模塊構(gòu)成。其中環(huán)路濾波器與NCO 模塊與內(nèi)插濾波器模塊使用Farrow 結(jié)構(gòu),實(shí)現(xiàn)了基于拉格朗日多項(xiàng)式的立方插值濾波器功能[14],該結(jié)構(gòu)的濾波器由FIR 濾波器實(shí)現(xiàn),濾波器參數(shù)由仿真工具FDATOOL 得到。
4.3 硬件測(cè)試結(jié)果
硬件實(shí)現(xiàn)和模擬BPSK 通信搭建的現(xiàn)場(chǎng)可編程門陣列(FPGA)硬件仿真環(huán)境如圖5 所示。

圖5 BPSK 通信實(shí)物圖
為了得到與測(cè)試結(jié)果相比較的絕對(duì)基準(zhǔn)來評(píng)估解調(diào)效果,需要得到協(xié)議的誤碼率或丟包率的理論極限,推導(dǎo)出理論極限為
式(8)分別描述了1 bit 信號(hào)能量值Eb與有效電壓值VSrms和比特持續(xù)時(shí)間Tb、功率譜密度N0與噪聲有效電壓VNrms和噪聲帶寬BW 之間的關(guān)系;式(9)為BPSK 解調(diào)誤碼率計(jì)算公式;式(10)描述了數(shù)據(jù)丟包率和誤碼率的轉(zhuǎn)換關(guān)系。
將解調(diào)得到的數(shù)據(jù)導(dǎo)入Matlab 中進(jìn)行處理,得到數(shù)據(jù)在傳輸過程中的丟包率,將理論、實(shí)際以及原解調(diào)算法所得數(shù)據(jù)整合,得到丟包率(PER)對(duì)比結(jié)果,如圖6 所示。
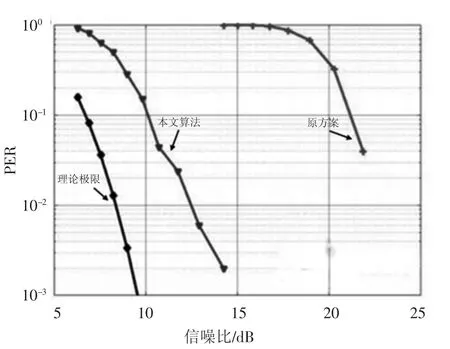
圖6 理論、實(shí)際及原算法丟包率對(duì)比
圖6 中由左至右曲線分別為理論極限、本文算法、原芯片解調(diào)方案在不同信噪比情況下的丟包率,每一個(gè)數(shù)據(jù)點(diǎn)發(fā)送500 個(gè)數(shù)據(jù)包。可以看到,在0.1 PER 值處,TypeB 的理論極限與實(shí)際測(cè)量結(jié)果存在3.1 dB 的差異,這是因?yàn)槔碚摌O限不包括數(shù)據(jù)包在開始或結(jié)束檢測(cè)時(shí)的錯(cuò)誤概率,只包含了誤碼率。可以看到在PER值為0.1 的情況下,相比原解調(diào)算法,本文設(shè)計(jì)算法所需信噪比環(huán)境降低了11 dB 左右,這說明本文設(shè)計(jì)算法可行,并且性能優(yōu)于原解調(diào)算法。
5 結(jié)論
本文提出基于希爾伯特變換的BPSK 解調(diào)算法并完成了算法的硬件實(shí)現(xiàn),通過對(duì)該算法、某款PCD 芯片解調(diào)算法的仿真,比較其在不同噪聲環(huán)境下的丟包率得到該算法的解調(diào)優(yōu)勢(shì):相比原算法,信噪比環(huán)境均降低了11 dB 左右,在低信噪比環(huán)境下,也能正確獲取數(shù)據(jù),解調(diào)效果顯著提升。
因此,基于希爾伯特變換的BPSK 解調(diào)方案,合理可行且容易實(shí)現(xiàn)。有望在RFID 技術(shù)中得到廣泛應(yīng)用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06