基于物聯(lián)網(wǎng)技術的銹斑蟳人工養(yǎng)殖環(huán)境監(jiān)測
2023-11-07 06:26:52楊明秋蒲利云陸建學夏連軍
湖北農業(yè)科學 2023年10期
鄒 雄,楊明秋,蒲利云,陸建學,夏連軍,劉 鑫
(1.中國水產(chǎn)科學研究院東海水產(chǎn)研究所/農業(yè)農村部東海與遠洋漁業(yè)資源開發(fā)利用重點實驗室,上海 200090;2.海南省海洋與漁業(yè)科學院,海口 571126)
水產(chǎn)質量對水產(chǎn)養(yǎng)殖的經(jīng)濟效益直接產(chǎn)生影響,而水質也決定了水產(chǎn)質量。因此,水產(chǎn)養(yǎng)殖過程中需要對水質進行監(jiān)測和控制[1]。在養(yǎng)殖過程中,溫度、溶氧量、pH 等因素都能夠對水產(chǎn)質量產(chǎn)生一定的影響。因此,如果對水質參數(shù)采取有效的獲取和研究,可以提高水產(chǎn)的質量和經(jīng)濟收益[2]。在國外,澳大利亞、日本及美國等國家水質監(jiān)測的相關系統(tǒng)設備均已經(jīng)較大規(guī)模使用[3]。此外,德國和丹麥不僅在水產(chǎn)養(yǎng)殖方面取得較好的成果,而且水質監(jiān)測方面的技術也有著不斷突破[4]。在國內,水產(chǎn)養(yǎng)殖技術及水質監(jiān)測手段研究有一定的發(fā)展,學者也在不斷進行探索,遲守峰等[5]提出適宜中國水質環(huán)境的水質監(jiān)測設備,可以完成最多6 種參數(shù)的共同監(jiān)測。Zhang 等[6]研發(fā)一種新的水質監(jiān)測手段,完成序列式多點監(jiān)測。
針對水質預測,學者利用計算機程序來完成水質參數(shù)預測。但是在水質預測中,計算機程序設計過程中涉及大規(guī)模的矩陣計算,程序的實際效果會受到算法較大影響。而LMBP(Levenberg-Marquardt Back Propagation)算法作為一種可操作性很強的神經(jīng)網(wǎng)絡算法,具有較多優(yōu)點。本研究對LMBP 算法優(yōu)化,并應用至水質監(jiān)測中,實現(xiàn)水產(chǎn)人工養(yǎng)殖的智能化控制,提高水產(chǎn)質量。
1 材料與方法
1.1 銹斑蟳人工養(yǎng)殖環(huán)境物聯(lián)網(wǎng)遠程監(jiān)測系統(tǒng)
1.1.1 系統(tǒng)總體結構 針對銹斑蟳(Charybdis feriatus)的養(yǎng)殖特征,根據(jù)銹斑蟳生長特性以及日常養(yǎng)殖習慣進行設計。該系統(tǒng)包括本地監(jiān)控子系統(tǒng)和網(wǎng)絡監(jiān)控子系統(tǒng)。其中,本地監(jiān)控子系統(tǒng)中包含水質監(jiān)測模塊、視頻監(jiān)控模塊、環(huán)境參數(shù)監(jiān)測模塊以及中央控制計算機。銹斑蟳人工養(yǎng)殖物聯(lián)網(wǎng)遠程監(jiān)控系統(tǒng)結構如圖1 所示。
銹斑蟳人工養(yǎng)殖物聯(lián)網(wǎng)遠程監(jiān)控系統(tǒng)主要包括水質監(jiān)測系統(tǒng)、環(huán)境參數(shù)監(jiān)測系統(tǒng)以及視頻監(jiān)控系統(tǒng)。其中,水質監(jiān)測系統(tǒng)中設置了溫度傳感器、溶解氧傳感器、pH 傳感器、液位傳感器以及水循環(huán)量傳感器,以此完成各參數(shù)的實時監(jiān)測。環(huán)境參數(shù)監(jiān)測系統(tǒng)的目的主要是對養(yǎng)殖場內濕度和溫度進行控制;視頻監(jiān)控系統(tǒng)則是由水上監(jiān)控系統(tǒng)和水下監(jiān)控系統(tǒng)兩個部分組成。
1.1.2 本地監(jiān)控子系統(tǒng) 從本地監(jiān)控系統(tǒng)模塊獲取到整個系統(tǒng)的數(shù)據(jù)信息,本地監(jiān)控子系統(tǒng)結構如圖2 所示。
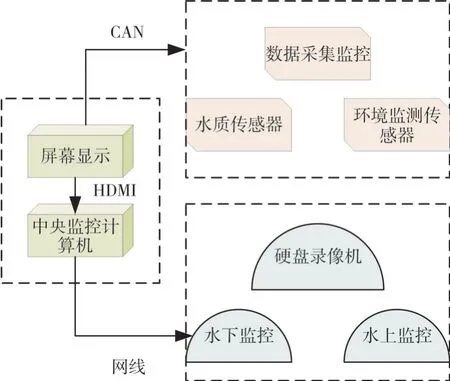
圖2 本地監(jiān)控子系統(tǒng)結構
1)水質監(jiān)測系統(tǒng)。水質監(jiān)測系統(tǒng)中最重要的是下位單片機多參數(shù)的智能監(jiān)測和處理,因此需要現(xiàn)場上位監(jiān)控機、無線傳感器網(wǎng)絡設備和遠程PC(Personal Computer)機監(jiān)控與其協(xié)同合作完成水質監(jiān)測系統(tǒng)的運作。水質監(jiān)測系統(tǒng)如圖3 所示。
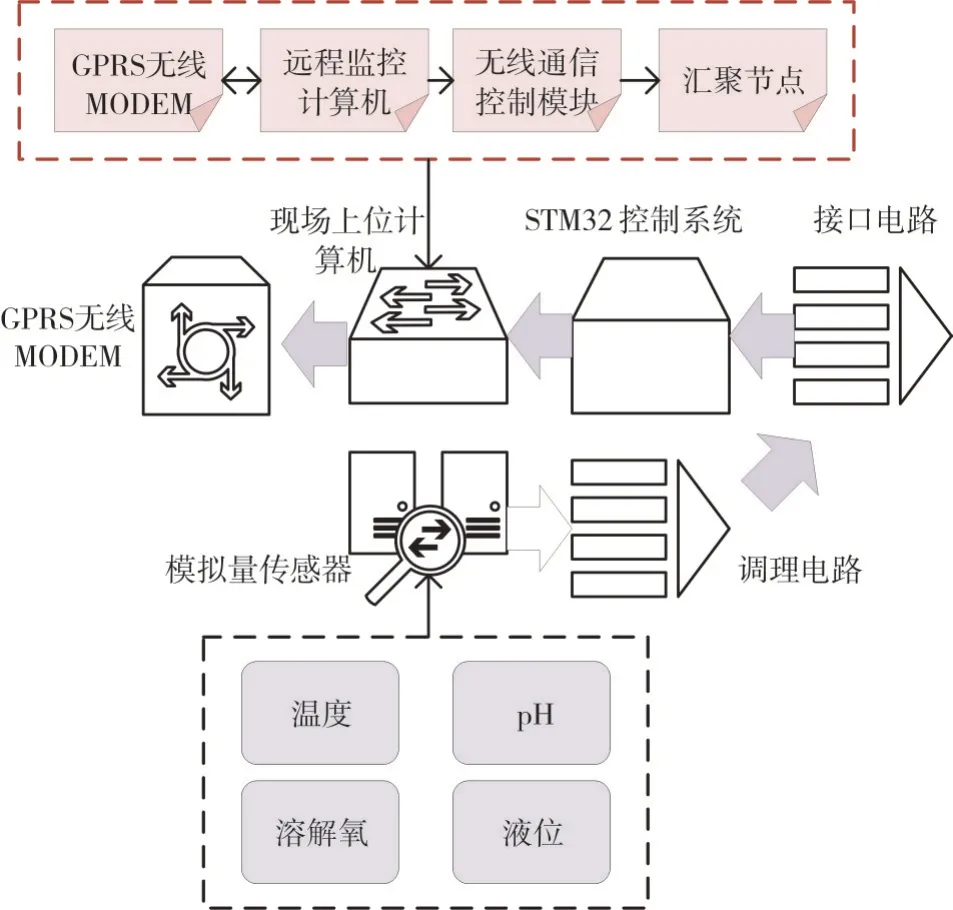
圖3 水質監(jiān)測系統(tǒng)
在水質監(jiān)測系統(tǒng)中,下位單片機檢測可以完成多個參數(shù)的共同監(jiān)測,并且可以使得參數(shù)信息數(shù)據(jù)實時上傳。同時,如果水質參數(shù)信息出現(xiàn)嚴重問題,該系統(tǒng)還能第一時間拉響警報。此外,對于系統(tǒng)越限問題,該系統(tǒng)也可以完成自動報警。
2)視頻監(jiān)控系統(tǒng)。水下攝像頭的選取也需要滿足一定的要求,如分辨率和清晰度盡量要高,以便觀察銹斑蟳的活動情況。此外,由于水下情況復雜,攝像頭上還需要內置燈源,且燈源應該有較高的耐腐蝕性和質量。另外,室內攝像頭的選取僅需要具有一般清晰度。室內攝像頭應該配備硬盤錄像機,以方便存儲監(jiān)控視頻,后續(xù)可以實時查看。視頻監(jiān)控結構如圖4 所示。
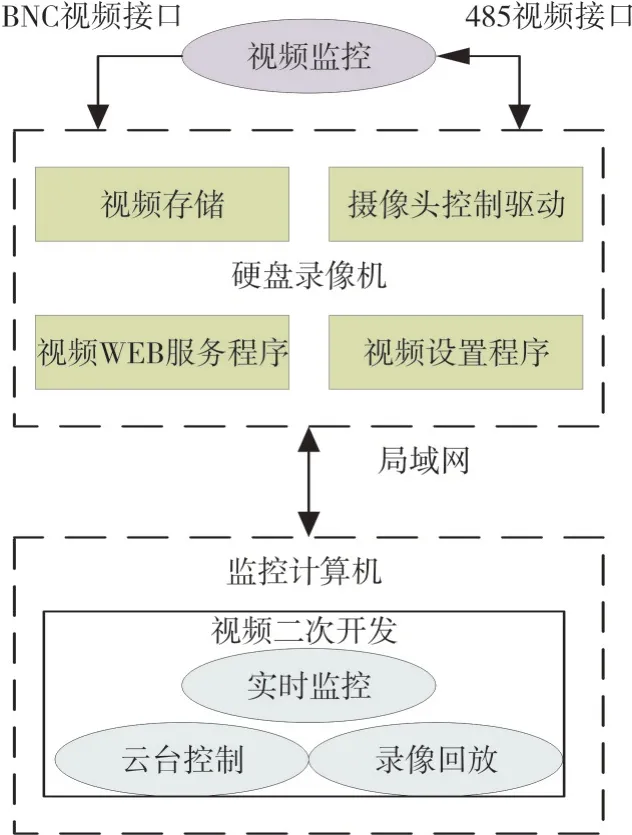
圖4 視頻監(jiān)控結構
3)環(huán)境參數(shù)監(jiān)測系統(tǒng)。環(huán)境參數(shù)子系統(tǒng)的作用是對養(yǎng)殖場中的溫度和濕度進行監(jiān)測。為實現(xiàn)環(huán)境參數(shù)的智能采集,選取模擬量智能采集裝置,該裝置能夠對4~20 mA 電流信號或者1~5 V 電壓信號以及電阻型傳感器阻值進行精準檢測。此外,該裝置內置8 路人工智能接口,并且能夠與8 個傳感器進行連接。輸入信號經(jīng)過有源濾波后,再傳輸?shù)紸DC(Analog-to-Digital Converter)轉換芯片中。
4)中央控制計算機。中央監(jiān)控計算機也被稱為遠程服務器,是整個系統(tǒng)最重要的部分。其功能是承載本地監(jiān)控程序和遠程服務程序并運行。銹斑蟳養(yǎng)殖本地監(jiān)控系統(tǒng)主要由數(shù)據(jù)顯示模塊、數(shù)據(jù)存儲與查詢模塊、實時曲線顯示模塊等組成,以此完成養(yǎng)殖場的水質、環(huán)境監(jiān)測和數(shù)據(jù)記錄查詢。本地監(jiān)控軟件總體架構如圖5 所示。
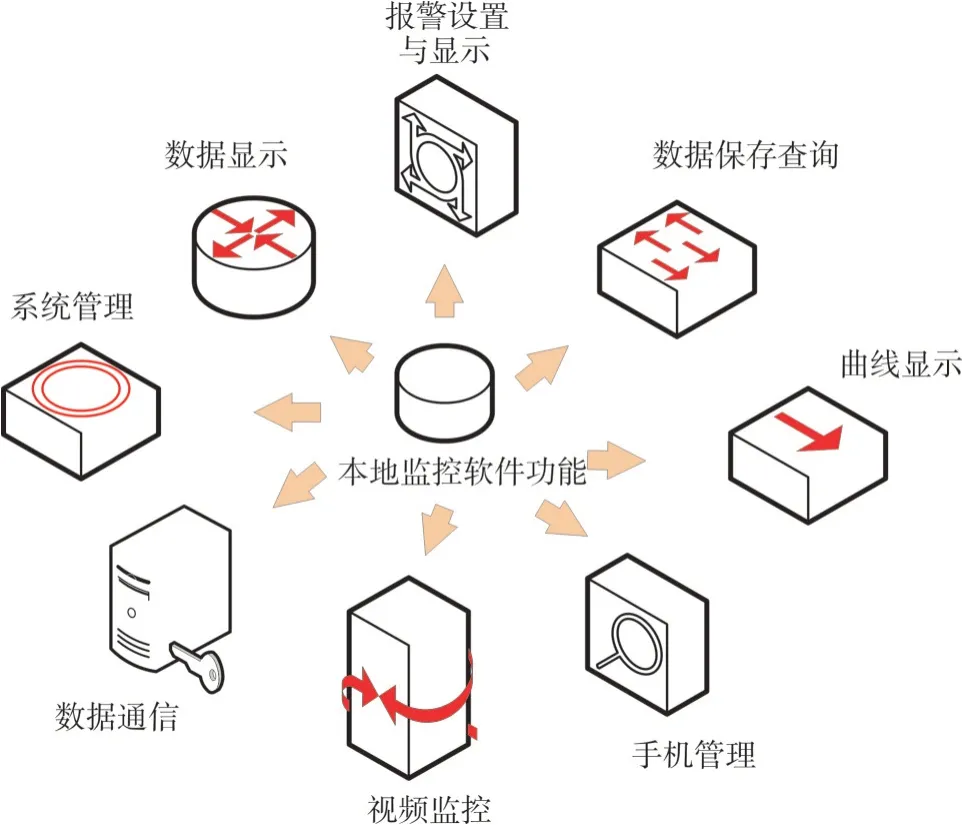
圖5 本地監(jiān)控軟件總體架構
1.1.3 網(wǎng)絡監(jiān)控子系統(tǒng) 網(wǎng)絡監(jiān)控子系統(tǒng)是以B/S(Broswer-Server)架構為基礎架構,并且利用模塊化的功能設計理念構造。該系統(tǒng)具有5 個功能模塊,遠程監(jiān)控系統(tǒng)結構如圖6 所示。
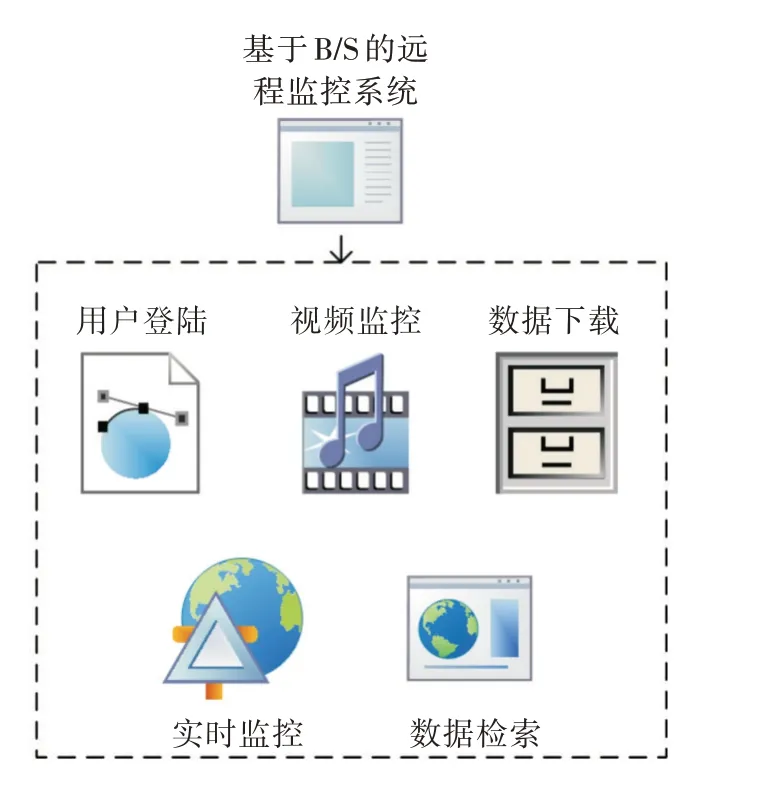
圖6 遠程監(jiān)控系統(tǒng)結構
在網(wǎng)絡監(jiān)控子系統(tǒng)中,當用戶授權時,才能夠接觸到系統(tǒng)的內部數(shù)據(jù);數(shù)據(jù)下載模塊可以實現(xiàn)歷史數(shù)據(jù)的緩存,以便于用戶實時查看并分析;實時監(jiān)控模塊則選取Ajax 技術,頁面不用刷新就能夠更新數(shù)據(jù);數(shù)據(jù)查詢模塊則可以讓用戶查詢到以往數(shù)據(jù)[7-9]。
1.1.4 系統(tǒng)軟件的設計 結合系統(tǒng)的結構和水質的實際監(jiān)測要求,選取STM32 的固件函數(shù)庫語言來編寫代碼實現(xiàn)系統(tǒng)。該固件函數(shù)庫具有較為全面的功能,使程序開發(fā)過程縮短[10]。其中,傳感器數(shù)據(jù)采集程序是對溫度和濕度傳感器等收集的數(shù)據(jù)進行A/D 轉換控制,而且可以將數(shù)據(jù)傳輸?shù)竭吘壘W(wǎng)關。
1.2 人工養(yǎng)殖水質的溶解氧預測與控制
對水質各參數(shù)進行非線性研究不但能夠實現(xiàn)水質各參數(shù)監(jiān)測的準確性,而且能夠對水質參數(shù)做出預測和預警。應用信息融合技術,構造兩級信息融合的研究模型是一種可行的方法。
1.2.1 信息融合結構 由于位置和高度的差異,水質中各參數(shù)也會存在差異性。因此,需要在待測區(qū)域均勻分布監(jiān)測點,將各個監(jiān)測點的數(shù)據(jù)進行綜合分析和處理。針對水質參數(shù)中的溫度、pH 以及溶解氧3 種參數(shù),信息融合結構如圖7 所示。
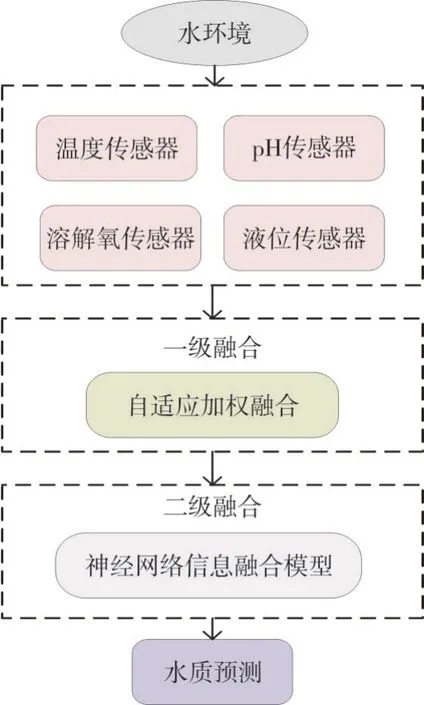
圖7 信息融合結構
1.2.2 第一級融合模型 第一級融合的目的在于對類型相似傳感器的權重大小進行衡量,以此提高傳感器對各個參數(shù)檢測的精確度。此外,還可以大幅度減小二級融合的數(shù)據(jù)規(guī)模,提升處理效率[11]。
1.2.3 第二級融合模型 在水質監(jiān)測研究中,選取溫度、pH 和溶解氧3 種傳感器,并分別將各參數(shù)傳感器分布在水下區(qū)域并保持一定距離的方位,然后利用A、B、C 對節(jié)點進行編號[12]。
1.2.4 基于人工神經(jīng)網(wǎng)絡的信息融合算法設計 人工神經(jīng)網(wǎng)絡的權值和閾值是利用所構造的學習規(guī)則來對樣本持續(xù)進行訓練得到的。因此,采選取人工神經(jīng)網(wǎng)絡,也就是LMBP 神經(jīng)網(wǎng)絡來實現(xiàn)多傳感器信息的高效融合,并且對水質做出預測和預警。
1)標準LMBP 算法。LMBP 是加速收斂BP(Back propogation)算法中的一種標準數(shù)值優(yōu)化方法。在網(wǎng)絡參數(shù)個數(shù)適中的情況下,LMBP 算法是最快的神經(jīng)網(wǎng)絡訓練算法。其公式為:
式中,v(wk)代表誤差向量;Δw是權值調整誤差;J(wk)是v(wk)的雅克比矩陣;μ為比例常數(shù);I是神經(jīng)元個數(shù)[13]。
2)改進LMBP 算法。雖然傳統(tǒng)LMBP 算法存在一定的優(yōu)越性,但是仍然存在如下問題:①初始步長和變化值不易選取;②存在“小步長”問題,收斂速度易受影響;③計算過程中需要求矩陣的逆,過程繁瑣。因此,需對LMBP 算法進行改進,首先利用以往經(jīng)驗確定步長和變化值為0.01 和5,其次針對“小步長”問題,將選取一個可以衡量收斂速度變化大小的函數(shù)插入算法中,即:
式中,ΔEk(w)為此次誤差變化,ΔEk-1(w)為上一次的誤差變化。
最后,針對計算繁瑣問題,通過矩陣變換,將矩陣處理成方程組來完成求解,大幅度提高效率。
3)試驗設計。為驗證基于改進LBMP 算法的溶解氧傳感器效果,將第一級融合處理后的40 個樣本數(shù)據(jù)作為水質預測的試驗數(shù)據(jù)。連續(xù)10 d 對數(shù)據(jù)進行采樣,并且每天設置固定的采樣時間和間隔,獲得樣本數(shù)量。最后,將前9 d 的數(shù)據(jù)作為輸入樣本,第10 天的數(shù)據(jù)作為測試樣本。
2 結果與分析
2.1 基于標準LMBP 算法的溶解氧結果
在基于未改進LMBP 算法下,不改變網(wǎng)絡模型中其他參數(shù),并在相同試驗條件下完成溶解氧數(shù)據(jù)的預測結果如圖8 所示。基于標準LMBP 算法的溶解氧預測具有一定的效果,但整體上將近一半的數(shù)據(jù)具有較大的預測誤差,說明標準LMBP 算法在溶解氧數(shù)據(jù)的預測上還存在一定問題。
2.2 基于改進LMBP 算法的溶解氧結果
在基于改進LMBP 算法下,不改變網(wǎng)絡模型中其他參數(shù),并在相同試驗條件下完成溶解氧數(shù)據(jù)的預測結果如圖9 所示。基于改進LMBP 算法的溶解氧預測具有不錯的效果,與標準LMBP 算法的溶解氧預測結果相比,改進后LMBP 算法預測溶解氧的絕對誤差和相對誤差明顯比標準LMBP 算法預測溶解氧的絕對誤差與相對誤差更準確,能夠滿足預期的要求。
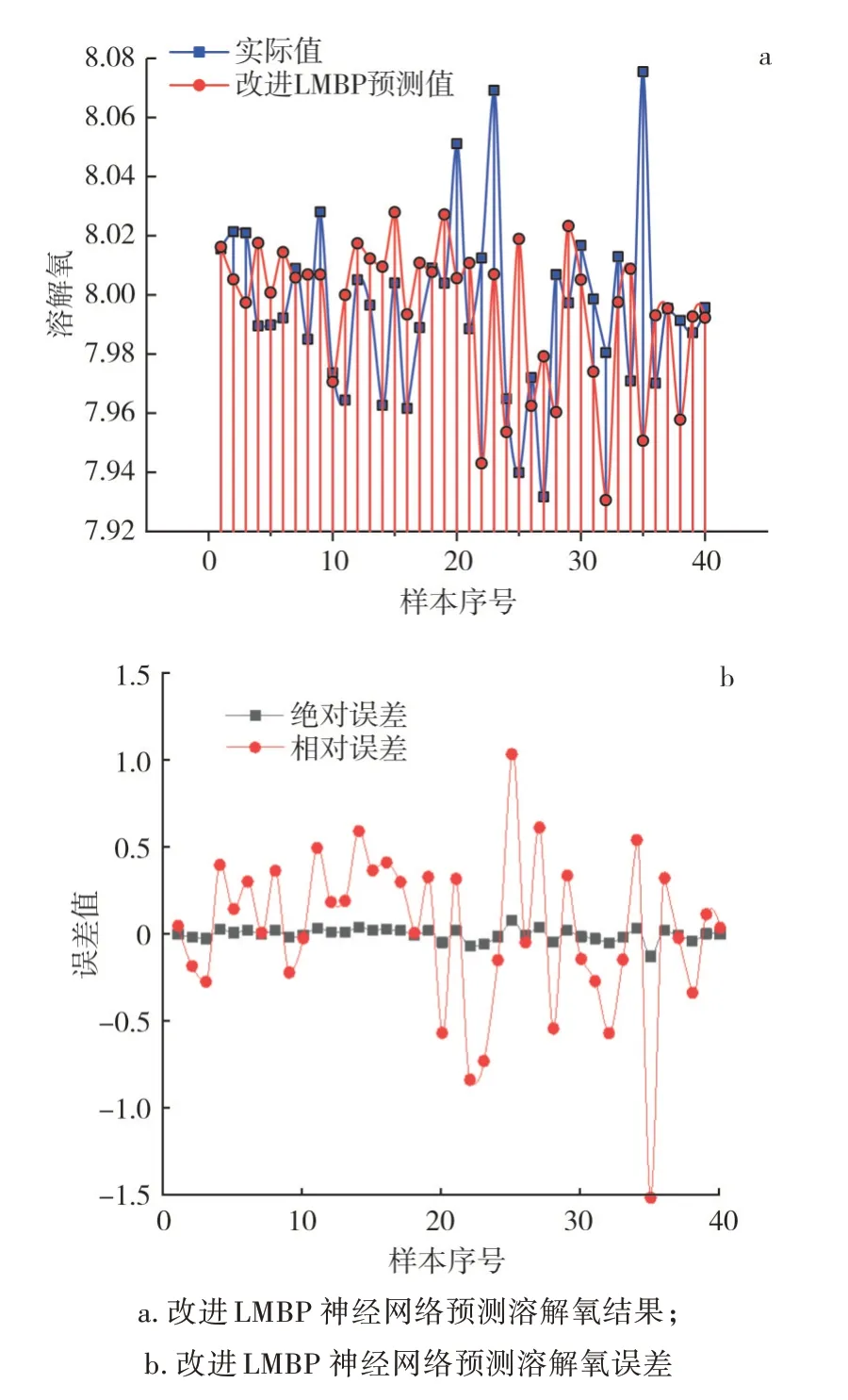
圖9 基于改進LMBP 神經(jīng)網(wǎng)絡的溶解氧預測結果及誤差
3 小結與討論
在水產(chǎn)人工養(yǎng)殖環(huán)境監(jiān)測的基礎上,對銹斑蟳人工養(yǎng)殖環(huán)境監(jiān)測進行了研究,其中包括遠程監(jiān)控系統(tǒng)和水質監(jiān)測系統(tǒng)的設計和各類傳感器的選擇。此外,還利用改進LMBP 算法對水質檢測系統(tǒng)中的溶解氧傳感器數(shù)據(jù)間的信息融合進行研究。結果表明,一方面,銹斑蟳環(huán)境監(jiān)測系統(tǒng)可以根據(jù)采集的數(shù)據(jù)進行智能判斷,完成溫室設施參數(shù)的穩(wěn)定智能化控制,提升了銹斑蟳養(yǎng)殖環(huán)境的智能化,也能夠減少一定的工作量。另一方面,改進后LMBP 算法預測溶解氧的絕對誤差與相對誤差顯然比傳統(tǒng)LMBP 算法要好,可以實現(xiàn)較準確的溶解氧預測。在利用人工神經(jīng)網(wǎng)絡對水質進行預測時,樣本容量不夠多,可能會對預測的準確性產(chǎn)生干擾,后續(xù)研究將擴大樣本數(shù)據(jù),進一步加強信息融合模型的預測水平。
猜你喜歡
環(huán)境(2023年5期)2023-06-30 01:20:01
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代水產(chǎn)(2019年1期)2019-05-16 02:42:04
當代水產(chǎn)(2019年3期)2019-05-14 05:42:48
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年14期)2018-08-21 01:38:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
