蛇形機器人的研究進展
2023-11-13 11:47:40商錦萍
機械制造 2023年10期
關(guān)鍵詞:環(huán)境
□ 商錦萍 □ 易 飛
1.武漢生物工程學(xué)院 武漢 430415 2.湖北億緯動力有限公司 湖北荊門 448124
1 蛇形機器人概述
隨著時間的推移,現(xiàn)代生物擁有出色的行走、自我調(diào)節(jié)及環(huán)境適應(yīng)的能力,令許多研究者驚嘆。仿生技術(shù)的飛速發(fā)展,則使許多新型仿真機器人問世。其中,蛇類具有靈巧身形、靈敏的反應(yīng)速度,成為機械設(shè)備制造業(yè)仿生的一個新寵。蛇形機器人擁有巨大潛力,有望成為未來的重要發(fā)展方向。
科學(xué)家們發(fā)現(xiàn),蛇是一種非常活躍的動物,能夠在各種復(fù)雜的環(huán)境中移動。蛇的骨骼結(jié)構(gòu)能夠輕松地進行彎曲、搖擺、直線和側(cè)向移動,無論是對于障礙物、泥沙、沙土、墻壁,還是在深水中。蛇形機器人具有出色的多功能性,擁有多種靈活的結(jié)構(gòu),因此被廣泛應(yīng)用于各個領(lǐng)域,如海洋、陸地、礦山、農(nóng)林、水產(chǎn)、建筑、交叉作業(yè)、消防、救援、搶險救災(zāi)等[1]。蛇形機器人的靈活度高,操控范圍廣,可以穿梭于各種管線之間,完成各種搜索任務(wù),甚至可以幫助人類從災(zāi)難現(xiàn)場拯救出幸存者。
隨著科學(xué)的不斷進步,蛇形機器人已經(jīng)變得越來越先進。筆者介紹蛇形機器人的最新發(fā)展,揭示其核心技術(shù)。
2 蛇形機器人研究現(xiàn)狀
2.1 功能特性
當(dāng)前新研發(fā)的蛇形機器人擁有出色的環(huán)境感知能力。采用多種傳感器,如壓力、視覺、距離、角度、速度,可以實時監(jiān)測周圍環(huán)境,并且利用數(shù)據(jù)融合技術(shù),調(diào)節(jié)蛇形機器人的運動參數(shù),從而滿足不同環(huán)境下的需求。以上技術(shù)的出現(xiàn),使蛇形機器人可以更加靈活地應(yīng)對外部環(huán)境,并且可以實現(xiàn)協(xié)同運動,甚至滿足自主運動的需求[2]。
盡管蛇形機器人可以完美地完成各種任務(wù),但是仍面臨著一些棘手的技術(shù)難題。第一,因為密封部分經(jīng)歷頻繁的拉伸、收縮,以及長時間操作,可能會導(dǎo)致表面的粘合劑受損,從而導(dǎo)致在水中運動時發(fā)生內(nèi)部滲漏,進而影響到控制系統(tǒng)的正常運行。因此,針對容易遭遇外部沖擊的接觸部位,需要選取合適的結(jié)構(gòu),并使用高強度材料,同時設(shè)置專門針對這類部位的防護裝置。第二,在芯片設(shè)計過程中,除了將眾多傳感器納入其中,還必須采用高效的散熱技術(shù),以及配備更加緊湊、高容量的電池,來保證系統(tǒng)的可靠性。
2.2 運動環(huán)境
文獻[3]設(shè)計的蛇形機器人具有出色的模擬生物蛇的特征,但只可以在二維環(huán)境,即平坦的水平面中實現(xiàn)正常運動。文獻[4]設(shè)計的蛇形機器人可以實現(xiàn)準(zhǔn)三維環(huán)境,即若干規(guī)則平面相交組成的地面環(huán)境中的運動,但是在三維復(fù)雜環(huán)境,包括山地、丘陵等凹凸不平的地面環(huán)境中的運動能力顯得捉襟見肘。因此,需要開發(fā)出更加靈活的三維空間操控系統(tǒng)。
隨著技術(shù)的進步,蛇形機器人的運動環(huán)境也在不斷變化,從二維平面環(huán)境轉(zhuǎn)變?yōu)槿S復(fù)雜環(huán)境。在這一情況下,蛇形機器人的理論研究更多地集中在復(fù)雜的三維環(huán)境中,如山地、丘陵、叢林、草原、戈壁、地震廢墟等。因此,未來蛇形機器人的研究應(yīng)該將重點放在三維復(fù)雜環(huán)境上,以期獲得更好的效果。
3 蛇形機器人常用單元連接結(jié)構(gòu)
生物蛇的身體結(jié)構(gòu)是經(jīng)過多次競爭、選擇及演變而形成的,具有一定的合理性。
文獻[4]經(jīng)過試驗研究總結(jié)出蜿蜒曲線后,產(chǎn)生了多種滿足該曲線的仿生蛇形機器人結(jié)構(gòu),常用單元連接結(jié)構(gòu)主要有三類[5-6]。
第一,關(guān)節(jié)間平行方式連接。蛇形機器人的兩個關(guān)節(jié)只能圍繞一個平行的軸旋轉(zhuǎn),關(guān)節(jié)間以平行方式連接,如圖1所示。優(yōu)點是結(jié)構(gòu)簡單,可靠性高,缺點是功能比較單一。
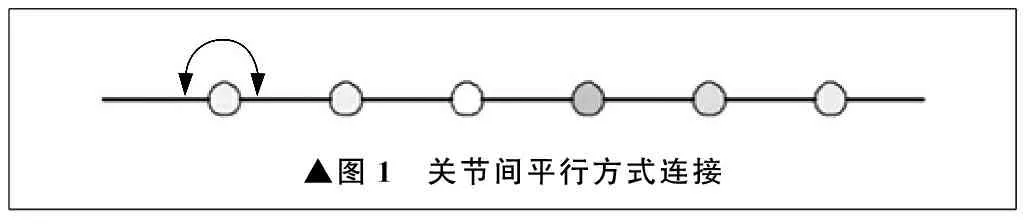
▲圖1 關(guān)節(jié)間平行方式連接
第二,相鄰關(guān)節(jié)間正交連接。蛇形機器人可以通過多個關(guān)節(jié)的組合實現(xiàn)復(fù)雜的三維運動,從而達到翻轉(zhuǎn)的效果,并且相鄰關(guān)節(jié)間的旋轉(zhuǎn)軸是正交的,如圖2所示。這一單元連接結(jié)構(gòu)使相鄰關(guān)節(jié)間不僅能夠繞著單軸旋轉(zhuǎn),而且能夠?qū)崿F(xiàn)復(fù)雜的生物蛇脊框架。
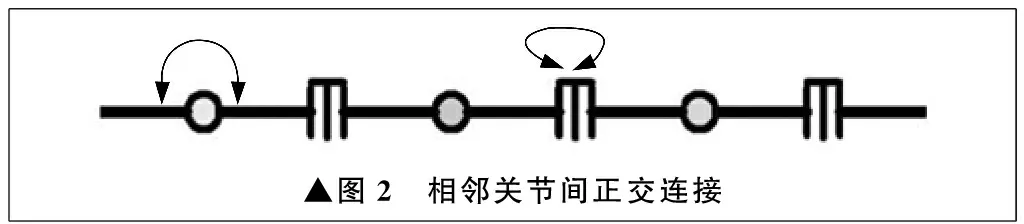
▲圖2 相鄰關(guān)節(jié)間正交連接
第三,單關(guān)節(jié)內(nèi)萬向節(jié)連接。萬向節(jié)結(jié)構(gòu)是目前廣泛應(yīng)用的蛇形機器人兩個單元之間的連接方式。單關(guān)節(jié)內(nèi)萬向節(jié)連接如圖3所示,與文獻[4]的設(shè)計類似,但更像生物蛇,因此更加復(fù)雜。
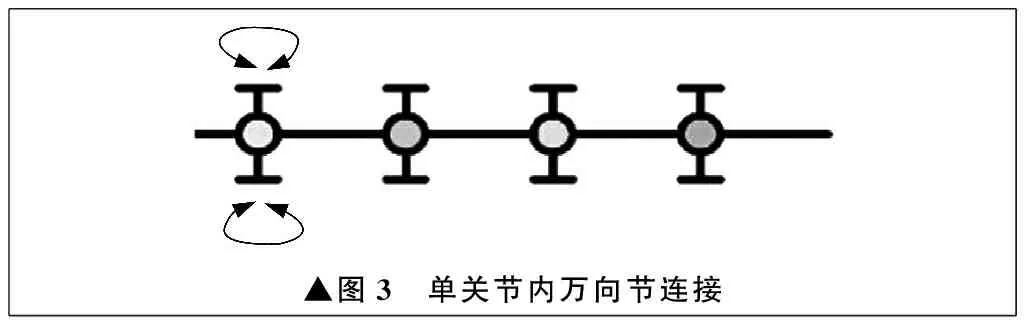
▲圖3 單關(guān)節(jié)內(nèi)萬向節(jié)連接
在蛇形機器人的結(jié)構(gòu)設(shè)計中,應(yīng)盡量保持高效性和簡潔性,同時也要考慮體積和質(zhì)量。為了達到上述目標(biāo),需合理選擇蛇形機器人的各項參數(shù)。
在蛇形機器人的結(jié)構(gòu)設(shè)計中,除了要求具備良好的剛度和耐腐蝕性外,還應(yīng)盡可能減小質(zhì)量,以減小蛇形機器人在運行過程中所需的動力。因此,選擇合適的材料顯得尤為重要,需要綜合考慮機械性能、物理性能、價格等因素。
此外,舵機的選擇至關(guān)重要,舵機尺寸、功率、扭矩、操縱速度都會直接影響蛇形機器人的性能。所以,為了達到最佳效果,蛇形機器人的舵機必須綜合考量質(zhì)量、速度、空間占比等因素[7-8]。
4 控制系統(tǒng)設(shè)計
蛇形機器人的動作較為復(fù)雜,因此精準(zhǔn)的控制至關(guān)重要。為了達到這一目標(biāo),需要對每個關(guān)節(jié)進行精準(zhǔn)調(diào)整,利用舵機的旋轉(zhuǎn),實現(xiàn)對各關(guān)節(jié)的精準(zhǔn)操作。蛇形機器人的控制系統(tǒng)由上位機、下位機及相關(guān)的調(diào)試軟件三方面構(gòu)成。
蛇形機器人的控制系統(tǒng)主要有集中控制和分布式控制兩種形式。集中控制簡單易行,易于實現(xiàn),但容易因控制系統(tǒng)局部故障而使整個蛇形機器人系統(tǒng)失去運動能力,可靠性不穩(wěn)定。分布式控制中,蛇形機器人的運動由多個控制器協(xié)同控制,且各為主從關(guān)系,所以在分布式控制下,各控制器的工作負荷小,具有較高的實時性和系統(tǒng)可靠性[9-10]。
某蛇形機器人控制系統(tǒng)結(jié)構(gòu)如圖4所示。蛇形機器人前端安裝的攝像頭實時捕獲圖像,然后通過圖像傳輸模塊將圖像傳輸至遙控器中的接收模塊,并在屏幕上實時顯示畫面。無線通信模塊接收到信號后,將控制信號傳送至主控制器。主控制器再通過串行外設(shè)接口總線將相應(yīng)的控制信號發(fā)送給從控制器,從控制器生成相應(yīng)的脈沖寬度調(diào)制信號,操控舵機運轉(zhuǎn),實現(xiàn)蛇形機器人的前進后退、左右轉(zhuǎn)彎等動作。
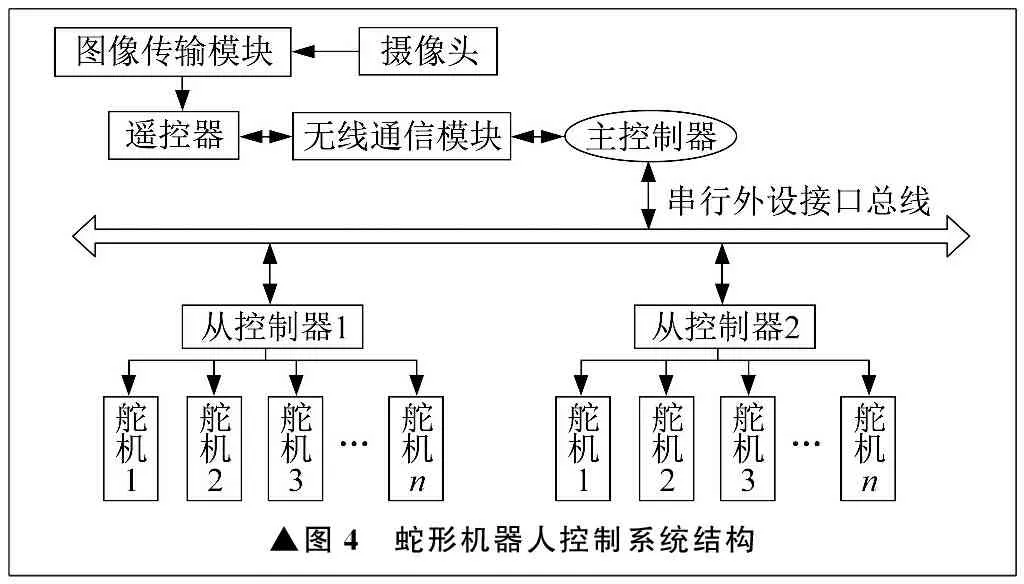
▲圖4 蛇形機器人控制系統(tǒng)結(jié)構(gòu)
5 結(jié)束語
隨著現(xiàn)代科技的飛躍發(fā)展,智能機器人已經(jīng)普遍存在,蛇形機器人因廣泛的應(yīng)用前景倍受關(guān)注。然而,目前研發(fā)的蛇形機器人仍然存在一些問題,如關(guān)節(jié)驅(qū)動方式過于復(fù)雜、爬行速度較慢、三維復(fù)雜環(huán)境運動能力不足,這些都會降低工作效率,并且控制效果也不盡如人意。隨著技術(shù)的進步、研究的不斷深入,如何提升蛇形機器人的靈活性、能源利用率、精確度,以及更好地適應(yīng)復(fù)雜環(huán)境,顯得尤為重要,這也是目前技術(shù)人員面臨的一大挑戰(zhàn)。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38