某火控雷達天線座振動特性研究
2023-11-15 06:51:04陳超朋張雷亭周麗陽
艦船電子工程 2023年8期
陳超朋 張雷亭 周麗陽 喬 梁
(中國電子科技集團公司第二十研究所高端電子裝備工業中心 西安 710068)
1 引言
隨著無線電技術的發展,雷達設備廣泛應用于天文,航海,航天,航空等領域,艦載火控雷達能夠探測跟蹤海面或者空中目標,為武器控制系統提供打擊目標的實時準確的地理坐標[1]。火控雷達包含了雷達掃描系統和火力控制系統,其可靠性、快速性、機動性直接影響整個火控系統的正常工作。火控雷達天線座工作環境惡劣,需要具有較高的剛度來承受炮擊時產生的振動載荷;同時伺服控制系統精度的提高,對雷達天線座的固有頻率提出更高的要求,以免引起結構自振。
賀李平等[2]建立機載SAR 天線座有限元模型,進行模態與瞬態動力學分析,為機載SAR天線座輕量化設計提供了有限元快速建模和分析方法。段勇軍等[3]通過對某機載雷達天線座進行理論模態分析與試驗模態分析,預知天線座的動態性能并指導優化設計。弋輝[4]利用有限元分析軟件ANSYS Workbench 對某雷達天線陣面及天線座進行隨機振動分析,證明了天線陣面和天線座的結構設計合理,雷達在炮振條件下可以正常工作。
對復雜裝配體結構進行動力學仿真分析時,易局限于模型簡化的合理性,難以獲取準確的振動特性。本文結合仿真與試驗,探究雷達天線座的振動特性,指導雷達天線座結構的進一步設計。
2 雷達結構
雷達天線座是天線陣面的支撐和定向裝置,通過天線座控制系統的俯仰傳動裝置和方位傳動裝置使天線陣面能夠按照預定的規律搜索目標[5],雷達天線座結構如圖1 所示。方位傳動裝置具有更高的方位跟蹤角加速度和一定的搜索能力,以四點接觸球軸承為主要支撐形式,實現天線陣面繞方位軸0°~360°內循環工作轉動;俯仰傳動裝置是以俯仰殼體兩叉臂內的兩對角接觸球軸承為主要支撐形式,實現天線陣面繞俯仰軸在一定俯仰角范圍內進行轉動來跟蹤目標。
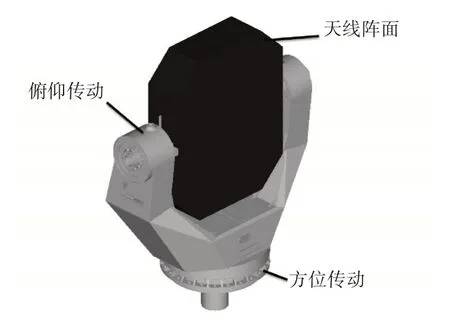
圖1 雷達天線座結構圖
雷達天線座工作時需要承受來自艦炮長時間高頻率的振動載荷,因此在設計振動工裝時,需要模擬天線座的力的傳遞路徑,即外載荷從與炮架螺栓連接位置傳遞到整個天線座。振動工裝作為連接雷達天線座與振動臺面的中間結構,設計的優劣與否直接影響振動試驗結果的準確度與可靠度[6]。
雷達天線座振動工裝設計為上下結構,整體采用槽鋼焊接而成,如圖2 所示。試驗時,振動工裝頂板與天線座螺栓安裝面連接,下框架采用壓板與試驗臺固連。
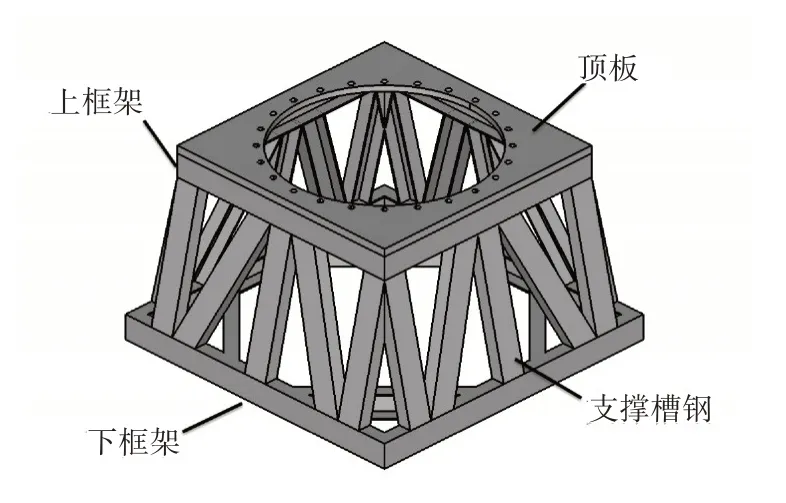
圖2 振動工裝結構圖
3 雷達天線模態分析
模態參數是結構的固有屬性,每一階模態都具有特定的頻率和振型。本文通過計算模態分析和試驗模態分析兩種方法獲取雷達天線座的模態參數。
3.1 模型離散
利用Hypermesh 有限元前處理軟件對天線座結構進行離散,基于模型準確性與建模經濟性的原則,對結構進行適當的簡化,得到其有限元模型[7]。天線座模型離散為四面體單元;并用梁單元模擬軸承連接;螺栓連接用剛性單元與梁單元結合的方式模擬;小質量設備采用質量點單元模擬,并通過柔性單元連接到對應安裝面上,雷達天線座有限元模型如圖3所示。

圖3 雷達天線座有限元模型
3.2 模態仿真
本文基于Lamczos 法對天線座模型進行模態計算,其是將跟蹤法和變換法組合起來的新的特征值解法,適用于求解大的稀疏矩陣的特征值。雷達天線座的前8 階模態參數如表1 所示,其前六階模態振型均為天線座及天線陣面的整體振動,后兩階模態振型為匯流環的局部振動。認為匯流環局部振動的原因為其質量較大,且匯流環安裝架作為圓型零件,固定位置距離中心較遠,軸向剛度弱。因此在后續設計中可適當增加匯流環安裝架的軸向剛度,減少匯流環的局部振動。

表1 雷達天線座模態計算結果
從圖4~圖6 可以發現雷達天線座在前幾階模態振型中,振動工裝幾乎沒有變形,說明其相對天線座結構剛度較大,對天線座模態響應的影響較小,設計合理。
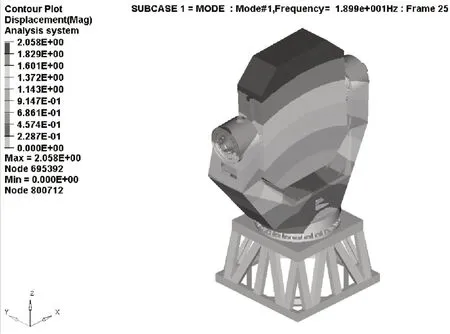
圖4 雷達天線座1階模態
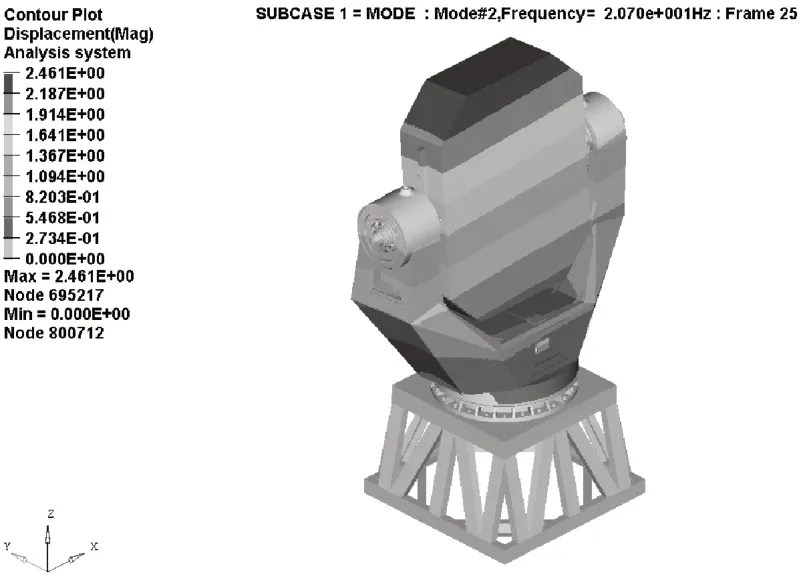
圖5 雷達天線座2階模態
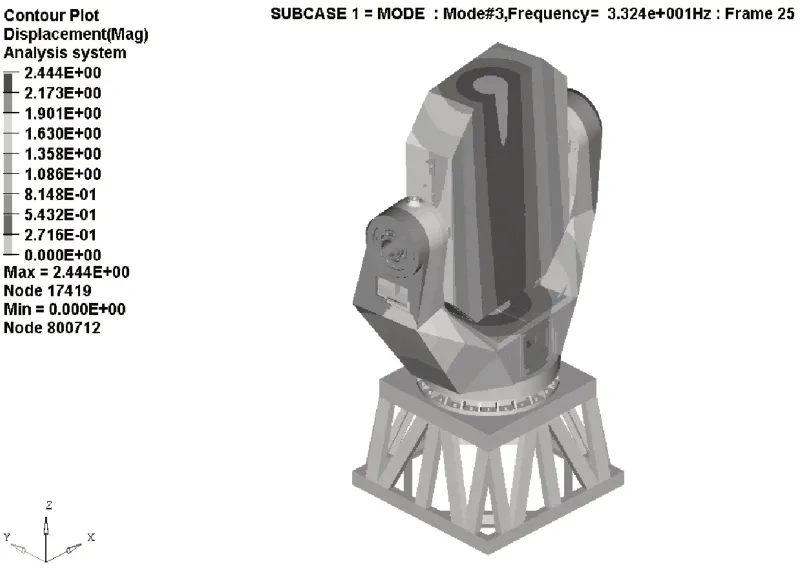
圖6 雷達天線座3階模態
3.3 掃頻試驗
為了進一步探究雷達天線座的模態性能,對其進行掃頻試驗。試驗采用單軸振動臺,對雷達天線座的射向,橫向與垂向分別掃頻,獲得各軸向的固有模態。由仿真分析可知其主要振型發生在叉臂位置,因此掃頻試驗測點布置在兩叉臂頂端。試驗采用對數掃頻方法,通過設置恒定加速度或恒定位移,頻率隨掃頻速率遞增(掃頻試驗參數見表2),進而獲得被測試件不同頻率下的響應,能夠在保證試驗精度的情況下快速完成試驗[8]。

表2 掃頻試驗參數
選取左叉臂加速度響應進行數據處理,去除電子線路干擾,去零漂、毛刺,得到雷達天線座各軸向加速度掃頻試驗數據如圖7~圖9 所示[9]。可以觀察到在天線座共振時,會產生較大的加速度響應峰值,符合振動規律。
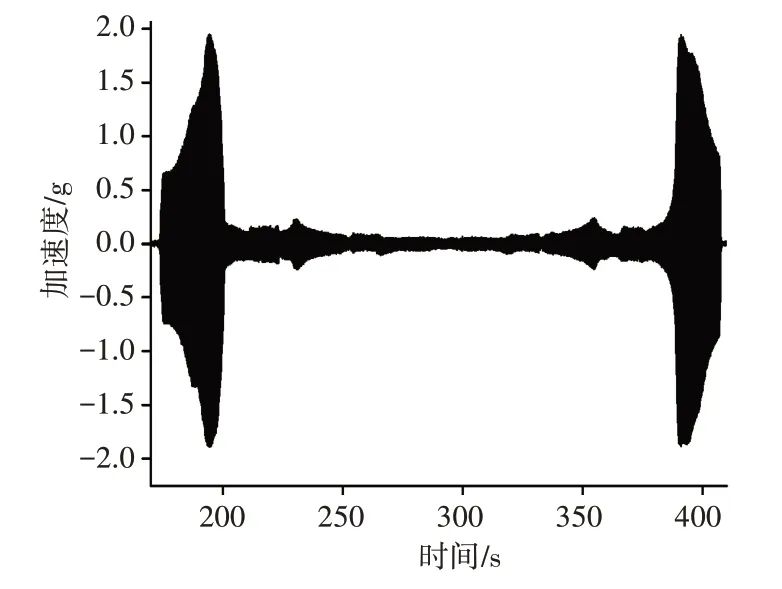
圖7 雷達天線座射向掃頻時域數據

圖8 雷達天線座橫向掃頻時域數據

圖9 雷達天線座垂向掃頻時域數據
掃頻試驗獲得的響應數據為隨時間變化的時域信息,且加速度數據樣本為離散形式。將這些時域信號通過傅里葉變換可以獲得對應的頻域信號,得到不同頻率下的功率譜。工程中常用快速傅里葉變換算法得到功率譜,快速傅里葉變換算法又稱周期圖法、直接法。它將平穩信號序列的N個觀察數據視為能量有限的信號,直接取數據序列的傅里葉變換,然后取其幅值的平方,進而得到信號的功率譜P(m),離散傅立葉變換如下:
N為累加采樣的點數[10~11]。對上述掃頻信號采用快速傅里葉變換算法進行頻譜分析,得到雷達天線座各軸向的加速度功率譜密度分布如圖10~圖12所示。
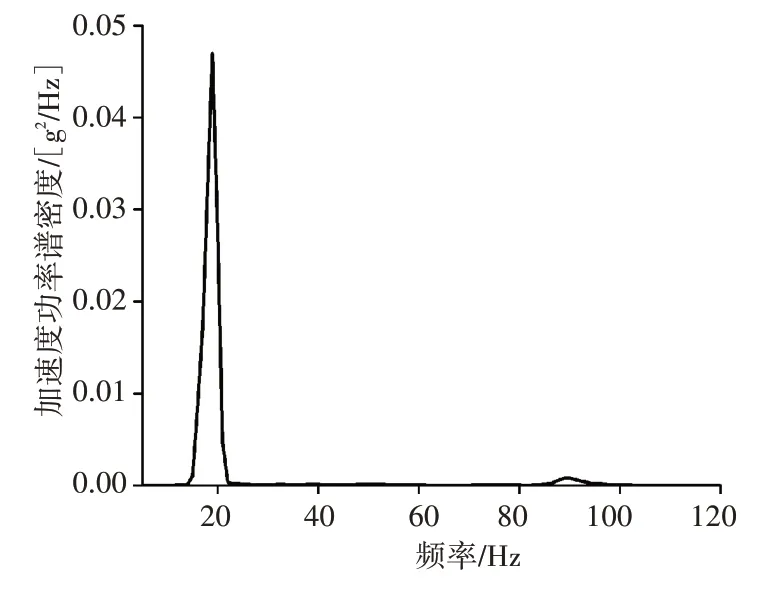
圖10 雷達天線座射向掃頻頻域數據

圖11 雷達天線座橫向掃頻頻域數據
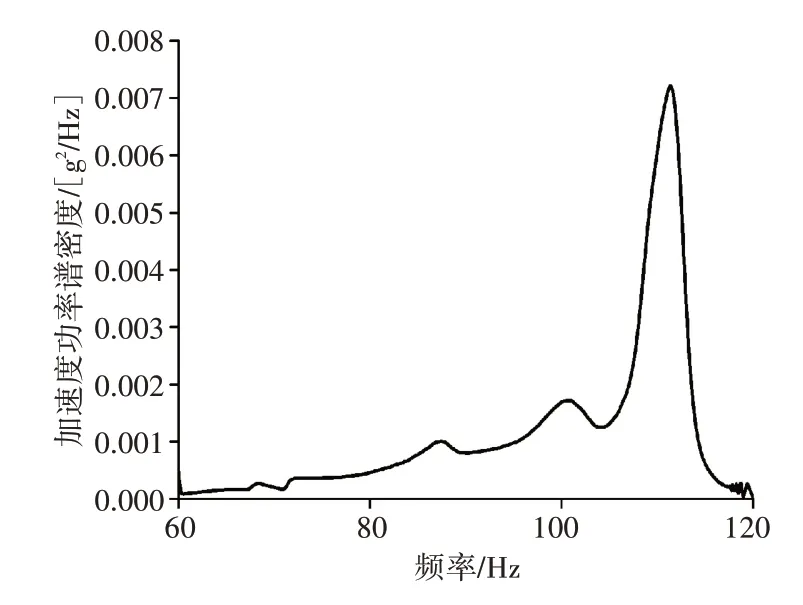
圖12 雷達天線座垂向掃頻頻域數據
從圖中可以看出天線座射向固有頻率為19.2Hz和88Hz;橫向固有頻率為16.4Hz和79Hz;垂向固有頻率為88Hz、102Hz 和112Hz。將各軸向固有頻率從低到大排列,并與仿真頻率與振型進行對比,如圖13 所示。發現試驗結果缺少第3 階和第4 階模態,主要考慮到試驗臺為單軸振動試驗臺,且施加激勵量級較小的原因,導致無法準確測量天線座全部模態。其余試驗結果與仿真中頻率及振型一一對應,最大誤差15.8%,滿足工程要求。同時仿真與試驗一階模態頻率均高于伺服控制系統帶寬(5Hz)的3倍,滿足設計要求。
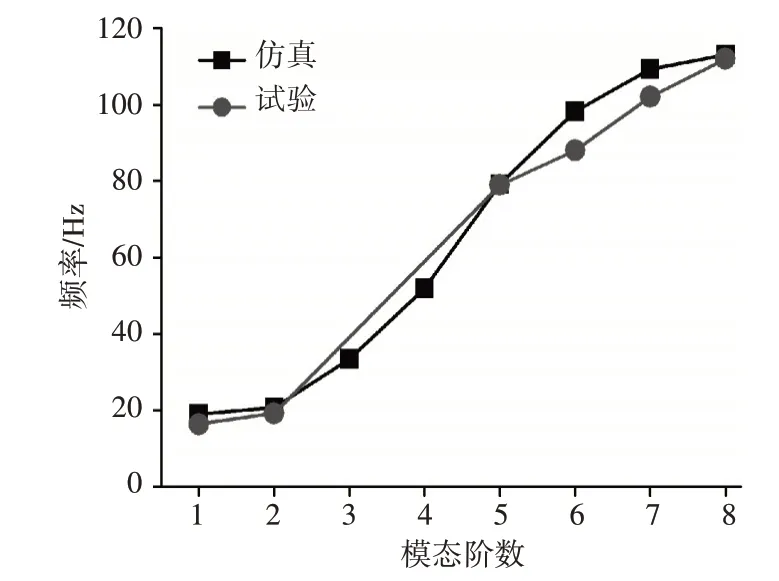
圖13 雷達天線座仿真與試驗對比
4 振動傳遞規律
火控雷達具有自動跟蹤能力,截獲目標后能不斷準確給出目標坐標數據,轉換成火炮的射擊諸元后,通過控制系統實現火炮的自動射擊。每一次射擊都會對雷達天線座造成一定程度的疲勞損傷。為了研究雷達天線座在炮擊振動載荷下的傳遞規律,將天線座與炮架連接位置加速度實測數據作為載荷激勵輸入到雷達天線座各軸向,分析對比各測點的加速度響應及振動傳遞率。
目前對振動傳遞性能的分析主要是建立在線性系統模型或掃頻試驗的基礎上[12],而雷達天線座的使用環境較為復雜,處于隨機振動環境中,本文通過文獻[11]中推導的隨機振動傳遞率計算公式分析雷達天線座的振動傳遞特性。經過公式推導得到振動傳遞率H(p):
式中:Ss(p)為響應功率譜密度,Sy(p)為激勵功率譜密度[13]。
4.1 垂向傳遞
為了探究雷達天線座的振動傳遞規律,在試驗臺進行各軸向的炮振試驗。炮振載荷譜的頻率為5Hz~2000Hz,試驗時控制輸入端位于振動臺與振動支架上表面,保證載荷輸入的一致性。試驗共布置七個加速度測點,見圖14,監測對應位置的加速度響應。其中測點1 位于雷達天線座與振動工裝的連接面;測點2 位于俯仰殼體的基準平面;測點3、4 分別位于俯仰殼體的右,左叉臂頂端(從后往前看);測點5、6 分別位于陣面與俯仰連接的右、左托架底部;測點7為陣面內部橫筋位置。
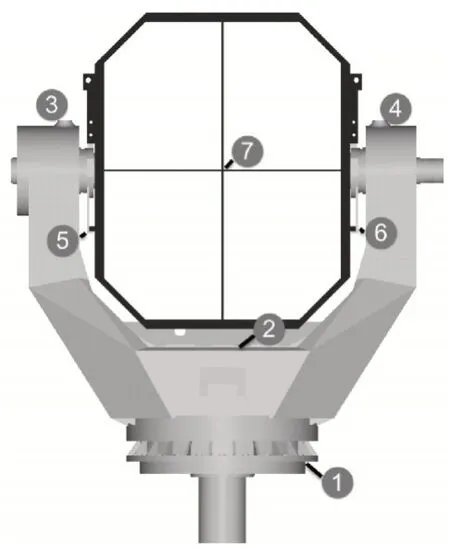
圖14 炮振測點布置
對試驗數據進行信號處理,且快速傅里葉變換后得到各測點的加速度功率譜密度,以測點1 為基礎,由式(2)計算得到其余各測點的振動傳遞率曲線,如圖15 所示(為區分各測點響應,將振動傳遞率數據放大10 倍)。可以看出,各測點振動傳遞率曲線的峰值均對應其共振頻率點,且振動傳遞率由天線座底部至頂部是衰減的,說明結構設計合理,自身阻尼大,能夠減弱振動載荷的傳遞;各測點振動傳遞率主要峰值在600Hz以內,說明高頻率振動載荷對天線座結構影響較小,可不重點考慮。
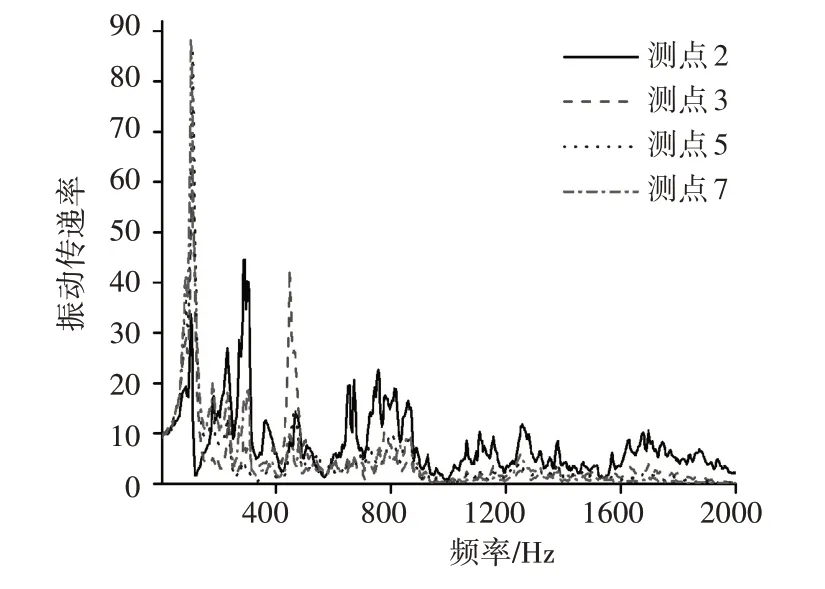
圖15 各測點垂向振動傳遞率(×10)
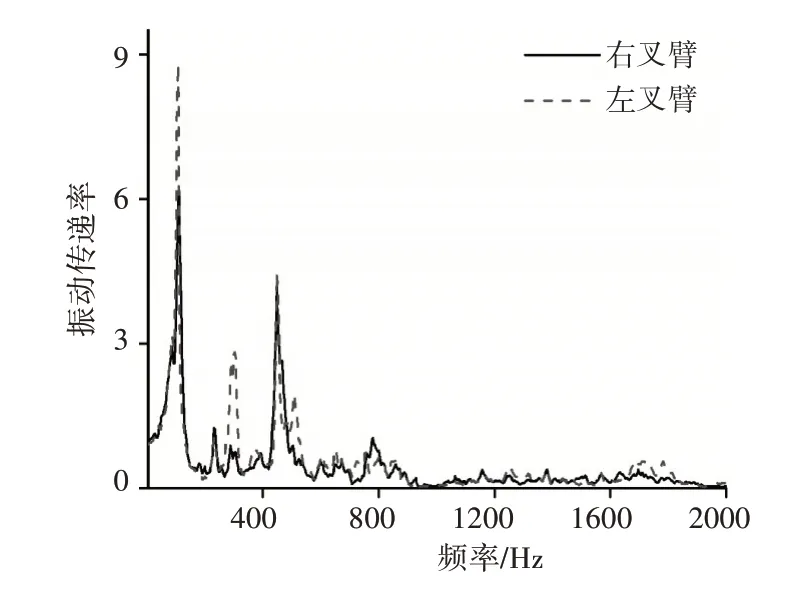
圖16 左右叉臂垂向振動傳遞率
圖17 叉臂、陣面射向振動傳遞率
圖18 叉臂、陣面橫向振動傳遞率
在同一激勵載荷作用下,雷達天線座左叉臂的加速度響應高于右叉臂,且左右撥桿具有相同的振動規律,主要認為是天線座右側裝有電機,質量高于左側,能量耗散能力強,加速度響應小。
4.2 射、橫向傳遞
為了更全面地了解雷達天線座的振動特性,對其射向和橫向施加對應炮振載荷,進行炮振試驗。通過分析發現,天線座射向與橫向振動傳遞規律與垂向一致:各測點加速度響應峰值均出現在軸向共振頻率點;同一激勵下,左叉臂的振動傳遞率高于右叉臂;俯仰殼體右叉臂的振動傳遞率高于陣面,且天線座橫向傳遞率低于射向,說明天線座抵抗橫向振動的能力更強。天線陣面作為雷達天線信號發射與接收的裝置,在整個雷達設備中具有絕對的重要作用。對雷達天線座的振動傳遞特性分析發現,天線陣面在整個結構中,承受最弱的振動載荷,說明天線座結構設計合理,天線陣面的振動環境得到優化,使得雷達整體壽命和可靠性得到提高。
5 結語
本文基于仿真與試驗探究了某火控雷達的振動特性,結果表明:
1)通過模態仿真與掃頻試驗結果對比,發現兩者前8 階模態頻率與振型基本一致,且雷達天線座一階模態頻率滿足伺服控制帶寬要求,結構不會產生自振。
2)雷達天線座前幾階振動模態發生在射向與橫向,說明射向與橫向抵抗低頻振動載荷的能力較弱。
3)在炮振載荷作用下,雷達天線座各軸向振動均從底部向頂部逐級遞減,天線陣面受到的振動載荷最弱。且天線座左側振動高于右側,主要認為是右側裝有電機,質量高于左側,能量耗散能力強的原因。
4)雷達天線座各軸向振動傳遞率峰值均出現在對應的共振頻率點位置,且主要在600Hz 以內,說明高頻載荷對于天線座的影響較小。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
