基于PSO-RBF優(yōu)化的船舶六相推進(jìn)電機(jī)缺相故障新型自適應(yīng)滑模容錯(cuò)控制研究
2023-11-16 12:21:46施偉鋒朱倍志謝嘉令
重慶交通大學(xué)學(xué)報(bào)(自然科學(xué)版) 2023年11期
施偉鋒,朱倍志,謝嘉令
(上海海事大學(xué) 物流工程學(xué)院,上海 201306)
0 引 言
船舶電力推進(jìn)系統(tǒng)推進(jìn)用電和船舶負(fù)載用電合一,可減小推進(jìn)裝置空間占比、提高船舶電力系統(tǒng)供電穩(wěn)定性且降低船舶運(yùn)行時(shí)能源管理難度,是船舶控制系統(tǒng)智能化的主要發(fā)展方向[1]。六相永磁同步電動(dòng)機(jī)(six phase permanent magnet synchronous motor,SPPMSM)具有輸出功率高、諧波失真小、故障容錯(cuò)高、電機(jī)結(jié)構(gòu)緊湊、易于控制等特點(diǎn),是船舶電力推進(jìn)電機(jī)的理想選擇。
船舶電力推進(jìn)系統(tǒng)中設(shè)備繁多,工作環(huán)境復(fù)雜,如在風(fēng)浪較大的情況下船舶會(huì)發(fā)生劇烈搖擺,使推進(jìn)裝置工作環(huán)境惡化,使船舶電力發(fā)生故障,影響船舶運(yùn)行[2]。文獻(xiàn)[3]通過分析電機(jī)故障時(shí)自由度的損耗,提出了一種通用容錯(cuò)電流計(jì)算表達(dá)式,保證了電機(jī)故障后平穩(wěn)運(yùn)行,降低了容錯(cuò)控制復(fù)雜度;文獻(xiàn)[4]提出了一種使用模型預(yù)測電流的容錯(cuò)策略,通過重構(gòu)故障后解耦矩陣從而得到新的預(yù)測模型,提高了容錯(cuò)控制性;文獻(xiàn)[5]基于故障后電機(jī)的數(shù)學(xué)模型,對(duì)傳統(tǒng)的電流環(huán)結(jié)構(gòu)進(jìn)行改造,設(shè)計(jì)一種雙層電流環(huán)結(jié)構(gòu),使故障后電機(jī)系統(tǒng)可更加完全的解耦,提高了電機(jī)控制的穩(wěn)定性。綜上,針對(duì)永磁同步電機(jī)斷相后容錯(cuò)策略,大致可以分為2類:① 通過對(duì)故障后剩余健康相電流進(jìn)行補(bǔ)償,保證故障前后定子繞組生成的磁動(dòng)勢不變;② 采用新型旋轉(zhuǎn)坐標(biāo),建立新的電機(jī)數(shù)學(xué)模型,使故障后的電機(jī)模型在新坐標(biāo)系下解耦,實(shí)現(xiàn)電機(jī)容錯(cuò)控制。
目前永磁同步電機(jī)矢量控制系統(tǒng)中,普遍采用PI調(diào)節(jié)器作為速度控制器,但對(duì)非線性、強(qiáng)耦合的六相永磁同步電機(jī)來說,當(dāng)控制系統(tǒng)受到環(huán)境干擾或者電機(jī)內(nèi)部參數(shù)變動(dòng)影響時(shí),PI控制方法并不能滿足實(shí)際控制需求。響應(yīng)速度快、不易受到擾動(dòng)和參數(shù)影響的滑模控制(sliding mode control,SMC)容易滿足電機(jī)的控制需求[6]。文獻(xiàn)[7]提出了一種基于改進(jìn)變指冪次數(shù)趨近律的滑模控制器,通過新型趨近律提高了運(yùn)動(dòng)點(diǎn)的趨近速度,提高了系統(tǒng)控制性能;文獻(xiàn)[8]提出一種模糊規(guī)則與指數(shù)趨近律相結(jié)合的混合滑模控制策略,對(duì)滑模控制器的趨近律參數(shù)進(jìn)行實(shí)時(shí)調(diào)整,提高了控制性能;文獻(xiàn)[9]通過神經(jīng)網(wǎng)絡(luò)優(yōu)化滑模控制中的切換增益,實(shí)現(xiàn)了對(duì)負(fù)載變化以及外界擾動(dòng)影響的實(shí)時(shí)補(bǔ)償,提升了電機(jī)控制系統(tǒng)穩(wěn)定性。
相關(guān)研究在不同程度上提高了運(yùn)動(dòng)點(diǎn)趨近速度,抑制了滑模控制中的抖振現(xiàn)象,但未考慮永磁同步電機(jī)在斷相故障下的容錯(cuò)控制。因此,筆者在傳統(tǒng)的船舶推進(jìn)電機(jī)滑模控制基礎(chǔ)上,提出一種針對(duì)推進(jìn)電機(jī)缺相故障下RBF神經(jīng)網(wǎng)絡(luò)與滑模控制相結(jié)合的容錯(cuò)控制策略,利用神經(jīng)網(wǎng)絡(luò)對(duì)SMC中的切換增益進(jìn)行實(shí)時(shí)調(diào)整,并通過粒子群算法的全局尋優(yōu)能力對(duì)RBF神經(jīng)網(wǎng)絡(luò)的權(quán)值、中心向量及寬度進(jìn)行優(yōu)化,同時(shí)引入新型指數(shù)趨近律和自適應(yīng)律提升滑模控制性能,以保證船舶推進(jìn)電機(jī)在缺相故障狀態(tài)下的穩(wěn)定運(yùn)行。
1 六相推進(jìn)電機(jī)模型
船舶電力系統(tǒng)主要由發(fā)電單元、配電單元、電力推進(jìn)單元及其他負(fù)載單元組成,其中電力推進(jìn)單元容量約占船舶電網(wǎng)容量的3/5[10]。
船舶電力推進(jìn)系統(tǒng)通常由推進(jìn)電機(jī)、變頻器和螺旋槳等設(shè)備組成,螺旋槳是船舶航行的主要?jiǎng)恿υ碵11]。現(xiàn)代船舶典型電力系統(tǒng)結(jié)構(gòu)如圖 1 。
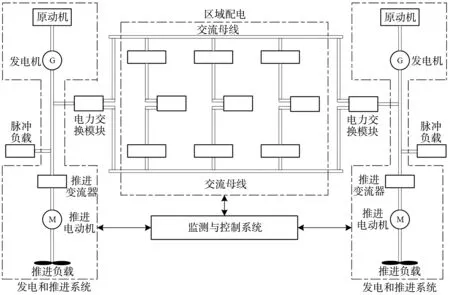
圖1 船舶電力系統(tǒng)結(jié)構(gòu)Fig. 1 Structure diagram of ship power system
相較老式船舶機(jī)械推進(jìn)單元,現(xiàn)代船舶電力系統(tǒng)結(jié)構(gòu)更為復(fù)雜,船舶設(shè)備都依靠電源,這使各種設(shè)備出現(xiàn)故障的概率增加。現(xiàn)代船舶電力推進(jìn)系統(tǒng)各用電負(fù)載間的聯(lián)系更為緊密,如發(fā)生故障,可能會(huì)導(dǎo)致其他健康設(shè)備也受影響[12]。
船舶SPPMSM在理想狀態(tài)下電壓方程如式(1):
(1)

λ6s=[sinθesin(θe-2π/3) sin(θe-4π/3) -sin(θe-π/6) sin(θe-5π/6) sin(θe-3π/2)]T;u6s=[uAuBuCuUuVuW]T;i6s=[iAiBiCiUiViW]T;ψ6s=[ψAψBψCψUψVψW]T;R6s=diag[RRRRRR]。
當(dāng)電機(jī)正常運(yùn)行時(shí),通過式(2)~式(4)坐標(biāo)變換(忽略零序分量的影響),得到基于雙d-q坐標(biāo)變換的同步電機(jī)電壓和磁鏈方程如式(5)、式(6):
(2)
P1=
(3)
P2=
(4)
(5)
(6)
式中:ud1、ud2、uq1、uq2、id1、id2、iq1、iq2為電機(jī)在d-q軸上的電壓與電流分量;ψd1、ψd2、ψq1、ψq2為電機(jī)的磁鏈;Ldd=1.5LAAd,Ld=Ldd+LAA1,Lqq=1.5LAAq,Lq=Lqq+LAA1;LAAd、LAAq為繞組d軸和q軸自感系數(shù);LAA1為漏自感系數(shù)。
此時(shí)電磁轉(zhuǎn)矩方程可寫為:
Te=1.5Pn(iq1ψd1-id1ψq1+iq2ψd2-id2ψq2)
(7)
式中:Pn為電機(jī)極對(duì)數(shù)。
2 優(yōu)化的自適應(yīng)滑模容錯(cuò)控制
2.1 船舶推進(jìn)電機(jī)新型自適應(yīng)滑模控制
SPPMSM的運(yùn)動(dòng)方程和經(jīng)簡化后的轉(zhuǎn)矩方程如式(8):
(8)
式中:TL為負(fù)載轉(zhuǎn)矩;B為阻尼系數(shù);ωm為機(jī)械角速度;J為轉(zhuǎn)動(dòng)慣量。
定義SPPMSM狀態(tài)變量如式(9):
(9)
式中:x1、x2為狀態(tài)變量;ω*為設(shè)定轉(zhuǎn)速。
將式(8)與式(9)聯(lián)立得:
(10)

(11)

筆者引入一種新型的指數(shù)趨近律如式(12):
(12)
式中:0<δ<1;a、b、q為大于0的常數(shù);σ>0。
由式(12)可知:當(dāng)|s|的值很大時(shí),f(s)近似為1/δ,g(s)近似為1,-εf(s)·g(s)為大于ε的數(shù),運(yùn)動(dòng)點(diǎn)趨近滑模面的速度較傳統(tǒng)指數(shù)趨近律快;當(dāng)|s|逐漸減小時(shí),f(s)逐漸趨向1,-εf(s)·g(s)逐漸趨近于0,使得滑模運(yùn)動(dòng)的運(yùn)動(dòng)軌跡由帶狀變?yōu)闈u進(jìn)收斂至0的形狀,優(yōu)化了與滑模面之間的趨近運(yùn)動(dòng),并使運(yùn)動(dòng)系統(tǒng)快速收斂,削減了系統(tǒng)抖振。
為減小故障對(duì)控制性能的影響,同時(shí)針對(duì)斷相故障導(dǎo)致的系統(tǒng)不穩(wěn)定,需設(shè)計(jì)一種自適應(yīng)律來抑制擾動(dòng)并優(yōu)化控制器在故障下的控制性能,設(shè)計(jì)自適應(yīng)律為:
(13)
式中:μ、γ為常數(shù)。
故由式(8)~式(13)得到控制器方程與q軸參考電流為:
(14)
2.2 基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模控制
2.2.1 RBF神經(jīng)網(wǎng)絡(luò)滑模控制器
為優(yōu)化滑模控制性能,削減系統(tǒng)抖振,利用RBF神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)與自適應(yīng)能力對(duì)SMC中的切換增益進(jìn)行實(shí)時(shí)調(diào)整,算法如式(15):
(15)
(16)
故神經(jīng)網(wǎng)絡(luò)權(quán)值最終學(xué)習(xí)算法如式(17):
w(t)=w(t-1)+Δw(t)+α[w(t)-w(t-1)]
(17)
式中:η為神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)速率;α∈(0,1)為慣量系數(shù)。筆者取η=0.1,α=0.05。
將式(15)的輸出結(jié)果帶入式(14)中,得到基于RBF神經(jīng)網(wǎng)絡(luò)的SMC方程與q軸參考電流:
(18)
2.2.2 PSO優(yōu)化原理
神經(jīng)網(wǎng)絡(luò)輸出結(jié)果主要受w、Cij和bi影響,故通過粒子群算法(particle swarm optimization,PSO)的尋優(yōu)能力來優(yōu)化神經(jīng)網(wǎng)絡(luò)參數(shù),進(jìn)一步提升控制系統(tǒng)性能。
設(shè)置第n個(gè)粒子位置pn和速度vn為:
pn=[b1b2b3C11C12…C23w1w2w3]
(19)
vn=[vn1vn2vn3…vn12]
(20)
粒子經(jīng)過t次迭代后的個(gè)體極值inbest(t)和全局極值gbest(t)為:
(21)
粒子位置及速度的更新公式為:
(22)
式中:W為慣性權(quán)重,且W=0.1;c1、c2為學(xué)習(xí)因子,且c1=c2=2;r1、r2均為服從均勻分布U(0,1)的隨機(jī)常數(shù)。
經(jīng)計(jì)算,粒子個(gè)體極值和全局極值更新為:
(23)
gbest(t+1)=min{y[inbest(t+1)]}
(24)
式中:y(x)為粒子適應(yīng)度函數(shù),且
(25)
式中:Nd(t)為期望輸出;N(t)為實(shí)際輸出。
綜上,基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模控制框圖如圖(2)。
2.3 船舶推進(jìn)電機(jī)缺相容錯(cuò)控制
在船舶運(yùn)行期間,推進(jìn)同步電機(jī)常見的逆變器與電機(jī)的開路、短路問題均可利用故障隔離技術(shù)轉(zhuǎn)為斷路運(yùn)行狀態(tài)。以SPPMSM為研究對(duì)象,根據(jù)故障前后定子磁勢不變?cè)瓌t,設(shè)計(jì)單相斷路故障容錯(cuò)策略。
SPPMSM正常運(yùn)行時(shí),其定子電流會(huì)在氣隙中生成一個(gè)可與轉(zhuǎn)子磁場相互作用的旋轉(zhuǎn)磁勢,進(jìn)而產(chǎn)生可驅(qū)動(dòng)電機(jī)正常運(yùn)行的穩(wěn)定電磁轉(zhuǎn)矩。電機(jī)出現(xiàn)缺相故障后,定子電流產(chǎn)生的旋轉(zhuǎn)磁勢會(huì)由穩(wěn)定的圓形磁勢分解為多個(gè)旋轉(zhuǎn)磁勢,這些磁勢都會(huì)與轉(zhuǎn)子磁場相互作用,產(chǎn)生導(dǎo)致合成轉(zhuǎn)矩發(fā)生劇烈波動(dòng)的額外不平穩(wěn)轉(zhuǎn)矩[13]。基于定子磁勢不變的容錯(cuò)控制策略,就是通過調(diào)節(jié)故障后剩余健康相的電流幅值與相位,補(bǔ)償缺相造成的磁勢變化,保證電機(jī)穩(wěn)定運(yùn)行[14]。
當(dāng)SPPMSM正常運(yùn)行時(shí),各繞組產(chǎn)生磁勢為:

圖2 基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模控制器Fig. 2 New adaptive sliding mode controller based on PSO-RBF optimization
(26)
式中:FA、FB、FC、FU、FV、FW分別為A、B、C、U、V、W六相瞬時(shí)磁動(dòng)勢;Fm為基波磁動(dòng)勢幅值;θ為電機(jī)電角度。
得到SPPMSM正常運(yùn)行時(shí)合成磁動(dòng)勢為:
∑F=iA+iBej120°+iCe-j120°+iUej30°+
iVej150°+iWe-j90°=3Fmejθ
(27)
當(dāng)SPPMSM正常運(yùn)行時(shí),注入定子繞組的為對(duì)稱正弦電流,各相生成的磁動(dòng)勢中負(fù)序分量會(huì)相互抵消,只留下正序分量,產(chǎn)生圓形合成磁動(dòng)勢軌跡。
SPPMSM的A相出現(xiàn)斷相故障時(shí),iA=0,六相電機(jī)變?yōu)槲逑嗖粚?duì)稱結(jié)構(gòu),繞組分布如圖3。此時(shí),剩余五相健康相合成磁動(dòng)勢可分解為兩個(gè)幅值有差別旋轉(zhuǎn)方向相反的磁動(dòng)勢,導(dǎo)致剩余健康相合成磁動(dòng)勢軌跡轉(zhuǎn)變?yōu)闄E圓形。
此時(shí)只要式(27)成立,就可以使得故障前后定子合成總磁勢不變。實(shí)際上,每相電流可由式(28)表示:
ir=arImcosθ+brImsinθ
(28)
式中:r=A,B,C,U,V,W。

圖3 A相斷相故障下船舶推進(jìn)電機(jī)繞組分布Fig. 3 Winding distribution diagram of marine propulsion motor under phase A phase failure
將ar和br作為待求量,根據(jù)式(27)與式(28)可得:
(29)
當(dāng)兩套繞組的中性點(diǎn)通過中線連接時(shí),各相電流之和恒為零,如式(30):
(30)
為了保證故障后剩余繞組之間的電流相互平衡,即缺相后剩余各相電流幅值相等,如式(31):
(31)
SPPMSM在缺相故障運(yùn)行時(shí),為保證輸出轉(zhuǎn)矩平穩(wěn),各相定子電流的幅值會(huì)隨之增大,這樣定子銅耗會(huì)隨著電流的增大而增大,這對(duì)于船舶十分不利。故筆者以定子銅耗最小為目標(biāo),其可以轉(zhuǎn)換為求取各健康相定子電流幅值的最小平方和f,有:
(32)
可得到缺相故障下基于定子磁勢補(bǔ)償?shù)氖S嘞嚯娏鳛?
3 新型自適應(yīng)滑模容錯(cuò)控制系統(tǒng)
SPPMSM容錯(cuò)控制框如圖4,其中包括一個(gè)轉(zhuǎn)速環(huán)SMC調(diào)節(jié)器和4個(gè)電流環(huán)PI調(diào)節(jié)器。
這種控制方法可以將對(duì)SPPMSM的控制等效為對(duì)兩臺(tái)三相PMSM的控制,且兩套系統(tǒng)均采用id=0的控制策略。當(dāng)iq1=iq2時(shí)可保證兩套繞組輸出電流幅值相等且均為正弦,從而保證輸出功率一致。
由PSO-RBF優(yōu)化的自適應(yīng)滑模控制器作為轉(zhuǎn)速環(huán)的控制器,由PI控制器作為電流環(huán)的控制器在斷路故障發(fā)生后通過對(duì)剩余健康相電流進(jìn)行補(bǔ)償,以此達(dá)到推進(jìn)電機(jī)容錯(cuò)控制的效果,從而實(shí)現(xiàn)推進(jìn)電機(jī)容錯(cuò)控制。

圖4 船舶六相推進(jìn)電機(jī)容錯(cuò)控制框Fig. 4 Fault-tolerant control block diagram of ship six phase propulsion motor
以某小型漁船電力推進(jìn)系統(tǒng)為研究對(duì)象,船舶六相推進(jìn)電機(jī)模型參數(shù)如表1,在MATLAB/Simulink仿真環(huán)境下,分析船舶在進(jìn)出港、海上全航速工況以及螺旋槳負(fù)載突加、減情況下的系統(tǒng)控制性能。
仿真試驗(yàn)中電機(jī)運(yùn)行時(shí)間小于實(shí)際電機(jī)運(yùn)行時(shí)間,但這對(duì)于船舶推進(jìn)電機(jī)控制算法的性能驗(yàn)證沒有影響。定義正常運(yùn)行時(shí)螺旋槳轉(zhuǎn)矩為400 N·m,將傳統(tǒng)SMC、新型SMC以及基于PSO-RBF優(yōu)化的新型SMC 3種控制策略下的結(jié)果進(jìn)行比對(duì)。
仿真中定義80 r/min為港內(nèi)全速,120 r/min為海上全速,滑模轉(zhuǎn)速控制器參數(shù)設(shè)置為c=3.5,q=1 500,μ=2,σ=0.05,電流環(huán)PI控制器參數(shù)KP=9.6,KI=1 680,采樣時(shí)間均為10-5s。

表1 船舶六相推進(jìn)電機(jī)仿真參數(shù)Table 1 Simulation parameters of ship six phase propulsion motor
3.1 推進(jìn)系統(tǒng)加減速及突加減負(fù)載仿真
為驗(yàn)證控制系統(tǒng)性能,進(jìn)行如下仿真:
初始階段船舶在港內(nèi)啟動(dòng)至全速,推進(jìn)電機(jī)轉(zhuǎn)速在1.3 s時(shí)穩(wěn)定至80 r/min,轉(zhuǎn)矩穩(wěn)定至400 N·m;3.5 s時(shí)船舶出港隨后加速到海上全速,推進(jìn)電機(jī)轉(zhuǎn)速在4.8 s時(shí)穩(wěn)定至120 r/min;7 s時(shí)在海上受到風(fēng)浪影響螺旋槳部分出水,導(dǎo)致轉(zhuǎn)矩驟降至200 N·m;9.0 s時(shí)恢復(fù)正常,推進(jìn)電機(jī)在10.1 s時(shí)恢復(fù)穩(wěn)定;12 s時(shí)準(zhǔn)備進(jìn)港,推進(jìn)電機(jī)在14 s時(shí)減速至80 r/min;15.0 s時(shí)螺旋槳被異物纏繞導(dǎo)致轉(zhuǎn)矩驟增至600 N·m,推進(jìn)電機(jī)在16.0 s時(shí)恢復(fù)穩(wěn)定;18.0 s時(shí)轉(zhuǎn)矩恢復(fù)至400 N·m,直至20.0 s仿真結(jié)束。仿真期間推進(jìn)電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩變化曲線如圖5。

圖5 三種控制策略下船舶推進(jìn)電機(jī)仿真結(jié)果Fig. 5 Simulation results of ship propulsion motor under three kinds of control strategies
由圖5可知:基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模控制器的控制效果,明顯優(yōu)于傳統(tǒng)滑模控制器和新型滑模控制器。在面對(duì)船舶加減速以及負(fù)載突變的情況下,筆者提出的新型控制策略調(diào)節(jié)速度快,轉(zhuǎn)速脈動(dòng)也明顯低于其余兩種控制策略,可以預(yù)想基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模控制下的船舶推進(jìn)電機(jī)在正常航行及面對(duì)突發(fā)情況時(shí)將有更好性能。
3.2 缺相故障容錯(cuò)仿真
仿真條件為:舶推進(jìn)電機(jī)帶螺旋槳負(fù)載啟動(dòng)且穩(wěn)定運(yùn)行,轉(zhuǎn)速穩(wěn)定至120 r/min,轉(zhuǎn)矩穩(wěn)定至400 N·m;3.0 s時(shí)推進(jìn)電機(jī)A相發(fā)生斷路故障,隨后容錯(cuò)控制開始。基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模容錯(cuò)控制策略下的船舶推進(jìn)電機(jī)電流如圖6。
由圖6可知:A相發(fā)生斷路故障時(shí),故障相電流ia降為0,B相和C相兩健康相電流相位互差180°。在容錯(cuò)控制策略的作用下,剩余五健康相電流從故障前的40 A增至55 A,約為原先電流幅值的1.3倍,與之前分析結(jié)果一致。
在3種控制策略下的船舶推進(jìn)電機(jī)控制性能對(duì)比如圖7。
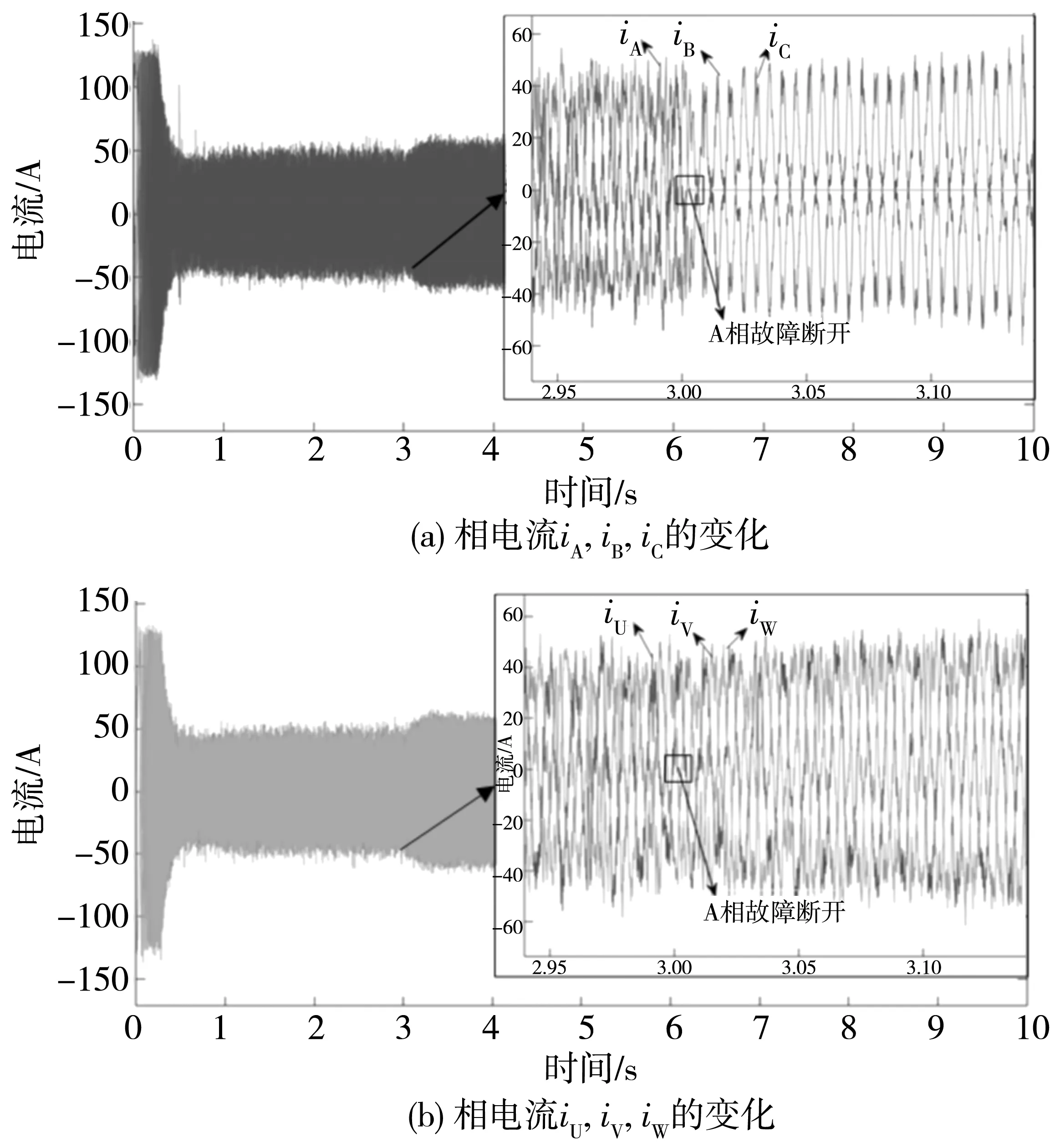
圖6 基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模容錯(cuò) 控制策略下的船舶推進(jìn)電機(jī)定子電流Fig. 6 Stator current diagram of marine propulsion motor under a new adaptive sliding mode fault-tolerant control strategy based on PSO-RBF optimization

圖7 3種控制策略下船舶推進(jìn)電機(jī)控制性能對(duì)比Fig. 7 Comparison of control performance of marine propulsion motor under three kinds of control strategies
由圖7可知:故障發(fā)生后,船舶推進(jìn)電機(jī)轉(zhuǎn)速及電磁轉(zhuǎn)矩出現(xiàn)較大波動(dòng),隨后立即進(jìn)行容錯(cuò)控制,基于PSO-RBF優(yōu)化的新型自適應(yīng)SMC使得調(diào)節(jié)時(shí)間相較于傳統(tǒng)的滑模控制縮短了1.7 s,且轉(zhuǎn)速脈動(dòng)更小,推進(jìn)電機(jī)能夠更加平穩(wěn)地運(yùn)行。但由于出現(xiàn)故障,導(dǎo)致系統(tǒng)控制性能下降,3種控制方法的轉(zhuǎn)矩脈動(dòng)會(huì)增大,3種控制策略性能比較如表2。

表2 3種控制策略性能對(duì)比表Table 2 Performance comparison of three kinds of control strategies
由表2可知:采用筆者提出的新型容錯(cuò)控制策略,船舶推進(jìn)電機(jī)的輸出轉(zhuǎn)矩更加穩(wěn)定,可獲得更加穩(wěn)定的轉(zhuǎn)速控制性能。
提出的基于PSO-RBF優(yōu)化的新型自適應(yīng)滑模控制器可以在船舶推進(jìn)電機(jī)出現(xiàn)單相缺相故障時(shí),使轉(zhuǎn)速更快恢復(fù)到額定轉(zhuǎn)速,并讓船舶推進(jìn)電機(jī)轉(zhuǎn)矩穩(wěn)態(tài)誤差更小,具有較強(qiáng)的容錯(cuò)性。
4 結(jié) 論
以船舶六相永磁同步推進(jìn)電機(jī)為研究對(duì)象,綜合分析了推進(jìn)電機(jī)故障前后的定子磁勢不變的控制策略,提出了一種基于PSO-RBF優(yōu)化的缺相故障新型自適應(yīng)滑模容錯(cuò)控制策略。實(shí)驗(yàn)結(jié)果表明:
1)提出的新型控制策略在船舶推進(jìn)電機(jī)正常運(yùn)行狀態(tài)下,面對(duì)船舶加減速以及突加突減負(fù)載等工況時(shí),在轉(zhuǎn)速穩(wěn)態(tài)精度和轉(zhuǎn)矩響應(yīng)速度上較傳統(tǒng)滑模控制有明顯改進(jìn)。
2)根據(jù)推進(jìn)電機(jī)斷相前后磁動(dòng)勢不變?cè)?通過對(duì)剩余健康相電流進(jìn)行補(bǔ)償,配合PSO-RBF自適應(yīng)滑模控制器,在推進(jìn)電機(jī)出現(xiàn)缺相故障后,相比傳統(tǒng)的滑模控制,轉(zhuǎn)速脈動(dòng)變小,轉(zhuǎn)速穩(wěn)態(tài)誤差和轉(zhuǎn)矩穩(wěn)態(tài)誤差均有所減小,推進(jìn)轉(zhuǎn)速恢復(fù)正常更快,具有較強(qiáng)的容錯(cuò)能力。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
船舶(2021年4期)2021-09-07 17:32:22
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
