環月-地面激光通信鏈路運動特性分析與設計
2023-11-18 05:24:04李曉亮劉榮科劉向南周楊趙卓
中國空間科學技術 2023年5期
李曉亮,劉榮科,劉向南,周楊,趙卓
1.北京航空航天大學 電子信息工程學院,北京 100191 2.北京遙測技術研究所,北京 100094
1 引言
隨著航天技術與空間科學的飛速發展,深空探測已成為人類航天活動的重要方向[1]。深空探測任務多樣化發展的同時對深空航天器通信系統提出了高速化、輕量化和小型化的應用需求。激光通信具有通信速率高、方向性強以及終端體積小、重量輕、功耗低等特點,可滿足未來深空探測活動對高速率通信、超遠距離傳輸、星際互聯組網應用等需求,在未來的深空探測領域具有很好的應用前景[2-4]。
深空激光通信鏈路面臨信號空間衰減大、強背景光干擾、大氣影響嚴重等問題,使得其技術難度和經費投入均比近地衛星激光通信要大得多[2]。得益于良好的空間激光通信技術研究基礎,美國在2013年率先開展了月地激光通信在軌演示驗證(lunar laser communication demonstration,LLCD),采用測距通信一體化設計,實現了環月飛行終端與地面站相距40萬千米的激光通信,其下行通信速率達622Mbit/s,上行通信速率為20Mbit/s,測距精度優于1cm[5-6]。LLCD驗證了月地激光通信的可行性,充分展示了深空激光通信的優越性,為后續深空激光通信計劃的實施提供了寶貴經驗。LLCD在軌試驗的成功也表明月地激光通信是邁向深空應用的第一步,促使各航天大國或組織對月地激光通信的研究再次進入了活躍期。美國未來將重點開展用于深空探測和行星探測的激光通信計劃,歐空局也在計劃實施深空激光通信試驗項目。中國計劃將在探月工程四期開展地月激光通信技術驗證試驗[1]。結合月地鏈路空間傳輸信道的特點,在未來的應用中,月地激光通信鏈路可能存在“月地直接信息傳輸鏈路”和基于“月面或環月軌道衛星-地球中繼軌道衛星-地面站”的“月地中繼信息傳輸鏈路”兩種應用模式[2,4,7]。其中,環月飛行器-地面站激光通信鏈路是發展中國深空測控網激光通信系統可能的技術途徑之一,相比于構建基于星間鏈路的射頻/光學混合通信網絡,其代價較小[1]。因此,對這種月地激光鏈路的研究具有十分重要的實際意義。
隨著衛星激光通信技術的不斷發展,國內外學者在近地軌道衛星星間激光通信鏈路軌道特性仿真、雙向光束穩定跟蹤約束條件分析以及星間無信標光捕跟瞄等方面開展了相關研究[8-14],并報道了月面對地直接信息傳輸激光鏈路的相關研究成果[15]。目前文獻針對環月飛行終端-地面站激光通信鏈路運動特性的研究較少。本文針對環月飛行終端-地面站激光通信鏈路應用場景,仿真分析了環月飛行終端-地面站激光通信鏈路的主要運動特性及設計約束條件,并對月地直接信息傳輸下行鏈路進行了功率預算分析。
2 鏈路模型
環月飛行器-地面站激光通信鏈路主要由環月衛星激光終端和深空激光地面站組成,圖1為環月飛行器-地面站激光通信鏈路示意。
為了便于分析環月飛行終端-地面站激光通信鏈路運動特性,給出了環月飛行器、地面站和太陽的幾何關系,其中將地球地心記為O,環月飛行器記為P,激光地面站記為E,太陽記為S,月球月心記為M。
2.1 鏈路跟蹤角度
研究地面站與環月飛行終端的幾何關系,主要是求算地面站跟蹤環月飛行終端的俯仰角和方位角等參數,以此為月地激光通信鏈路設計提供依據。如圖2所示,可以算出激光地面站的俯仰角ε和方位角α。
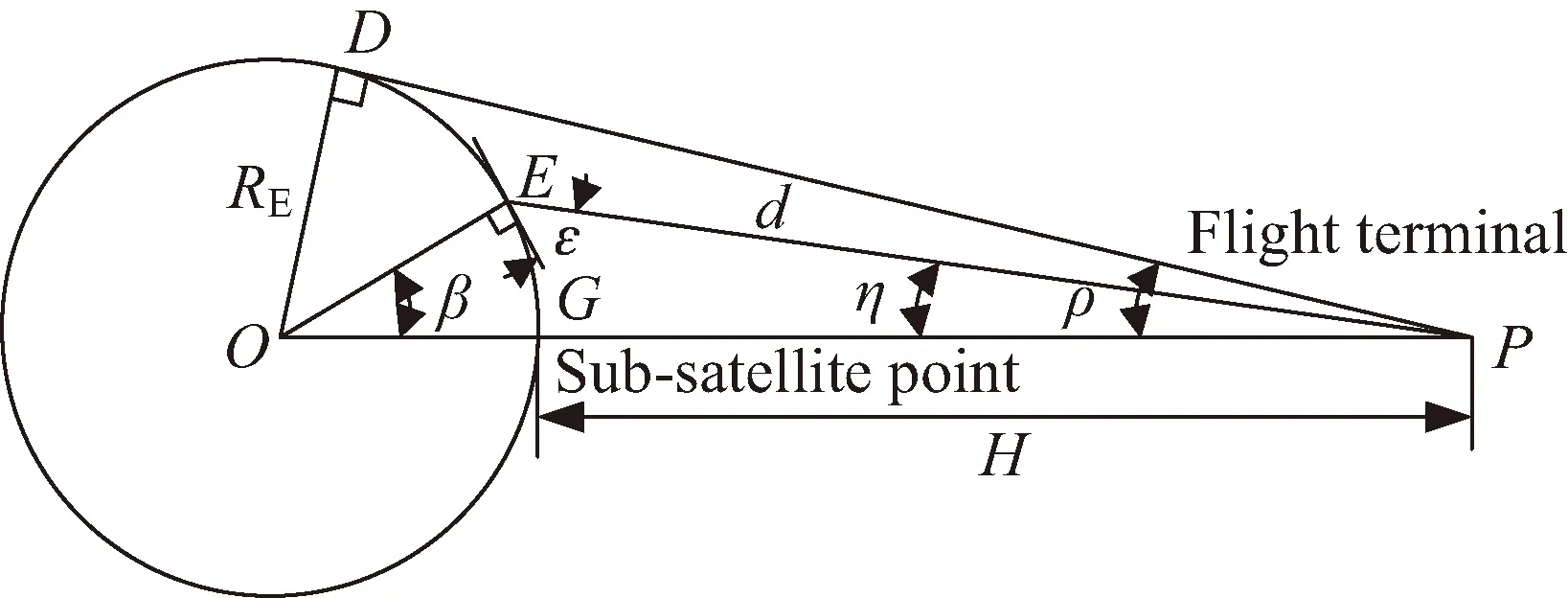
圖2 環月飛行器與地面站的幾何關系示意Fig.2 Schematic diagram of geometric relationship between circumlunar terminal and ground station
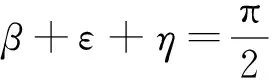
地面站到飛行終端之間的俯仰角ε和方位角α滿足如下公式:
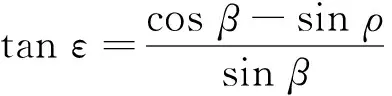
(1)
式中:β為飛行器星下覆蓋區對應地球的半中心角,滿足
cosβ=cos (λE-λP)cosφPcosφE+
sinφPsinφE
(2)
tanα=

(3)
(4)
(5)
式中:(λE,φE)為地面站經緯度;(λP,φP)為飛行器的星下點經緯度;RE為地球半徑;H為飛行器與地面的距離。
此外,由地面站與飛行終端之間帶來的時間延遲和相對運動,將引起一定的視軸指向誤差,因激光光束的束散角非常窄(幾十微弧度),需要對此視軸指向誤差進行補償和修正,以降低激光波束的能量損失。
由延遲時間引起的提前指向角φ表達式為:

(6)
式中:△v為環月飛行終端與地面站的相對運動線速率差;c為光速。
2.2 鏈路可見性
環月飛行器在繞月運動的過程中,其與激光地面站的通信視軸將會受到地球和月球的遮擋的影響,導致通信中斷。因此,在鏈路設計時需分析因視軸遮擋引起的通信中斷問題,評估通信鏈路的可見性。
如圖3所示,當在t1時刻,若飛行終端與地面站的通信視軸剛好進入月球遮擋區域,此時滿足如下邊界條件:
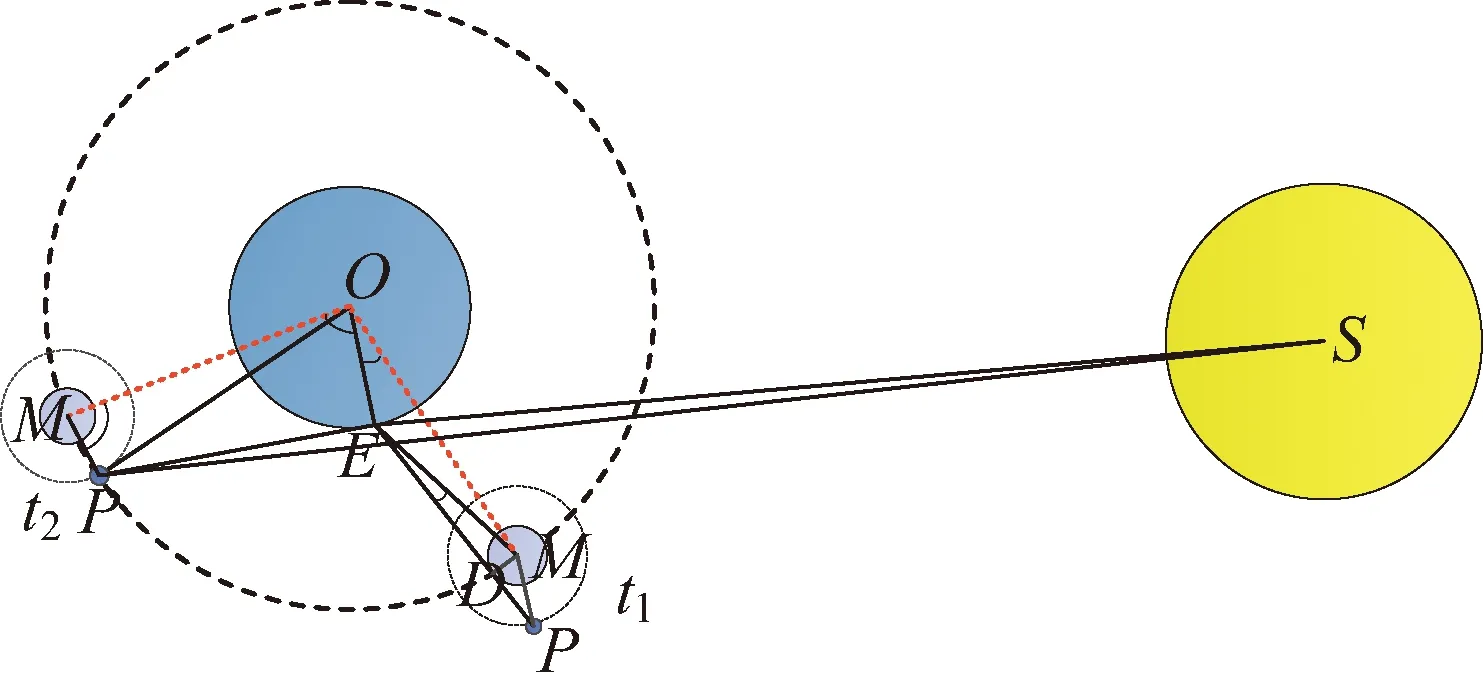
圖3 環月飛行器、地面站和太陽的幾何關系示意Fig.3 Schematic diagram of geometric relationship of circumlunar terminal,the ground station and the sun
(7)
MD·ED=0
(8)
當在t2時刻,若飛行終端與地面站的通信視軸剛好進入地球遮擋區域,此時滿足如下邊界條件:
(9)
2.3 太陽光干擾
對于月地激光通信鏈路,當遭遇日凌或通信兩端的視軸與太陽光的夾角過小時,太陽光將引起探測器飽和或者信噪比急劇下降,導致鏈路無法建鏈和通信。因此,必須考慮太陽對激光鏈路的干擾情況。
如圖3所示,當在t2時刻,若太陽-飛行終端-地面站三者的連線SPE(sun-probe-earth)角或SEP(sun-earth-probe)角小于激光終端半個接收視場,此時激光通信鏈路將出現日凌現象,無法進行激光通信。此時太陽對激光通信終端造成影響的充要條件為:

(10)
式中:FOVE和FOVP分別對應地面站和飛行終端的接收視場。
2.4 鏈路多普勒頻移
激光通信鏈路多普勒頻移的大小及變化特性是影響激光通信體制選取的關鍵因素之一。因此,對于環月飛行器相對于地面站的多普勒頻移fd滿足如下關系:
(11)
式中:v∥為沿環月飛行終端與地面站激光傳播方向上的相對運動速率(即徑向相對速率分量);λ為激光載波波長;θ為飛行終端與地面站相對速度與光束傳播方向的夾角。
3 軌道特性仿真分析
基于以上分析,結合中國深空探測發展特點,通過軟件仿真,討論了環月終端對地激光通信鏈路的運動特性。其中,環月飛行器的軌道參數參照嫦娥二號衛星軌道參數,環月衛星軌道為100km[16];深空激光地面站選取喀什、阿根廷站[1,17]。結合月球中繼衛星軌道設計,對采用環月衛星-月球中繼衛星-地面站的激光鏈路的運動特性也進行了仿真和對比分析。其中,月球中繼軌道選擇了雙星共面橢圓星座[18]。
3.1 鏈路可見性
鏈路可見性是評估鏈路應用效能的重要因素之一。在地球、月球遮擋期內,月地激光通信鏈路將無法工作。因此,在鏈路總體設計之初,需重點評估鏈路的可見性。為此,對月地直接信息傳輸鏈路和月地中繼信息傳輸鏈路兩種場景的可見時間進行了對比分析。
表1給出了一個月內兩種通信鏈路的可見性統計數據。由鏈路總可見時間可知,在一個月的時間內,相比于月地直接信息傳輸方案,采用雙星共面橢圓星座的中繼方案后,月地中繼鏈路的可見時間分別提升了16.1%(喀什站)和18.6%(阿根廷站)。因此,僅從地球、月球遮擋影響來說,采用雙星共面橢圓星座的月地中繼信息傳輸鏈路的可見時間更長。而對于地面站,在直傳和中繼兩種月地激光鏈路情況下,喀什站與環月飛行終端在月地直接信息傳輸鏈路和中繼鏈路兩種場景中的總可見時間與阿根廷站相比,分別延長了約4.5%和6.5%。
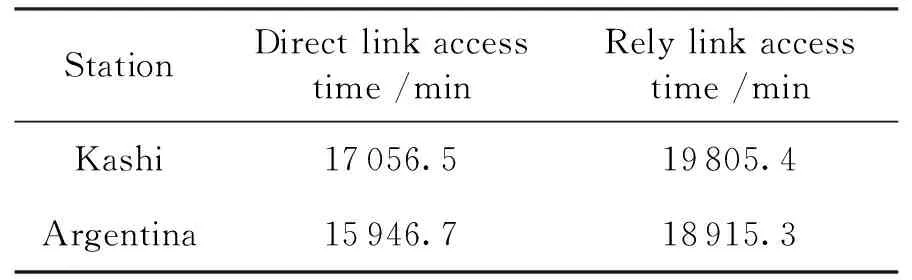
表1 一個月內環月-地面激光鏈路可通時間對比Table 1 Access time between the circumlunar terminal and the ground station in one month
圖4給出了一個月內喀什站、阿根廷站分別與環月終端建立直傳鏈路的可見時間弧段分布。因此,對于嫦娥二號飛行終端,選用喀什站更利于月地激光通信。
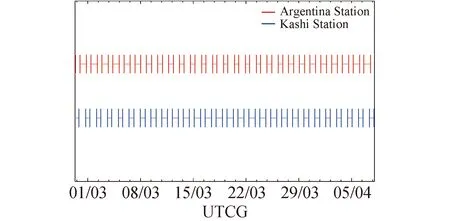
圖4 喀什站、阿根廷站與環月終端直傳鏈路可見時間Fig.4 Access time of laser terminal to Kashi and Argentina Stations
3.2 太陽光干擾
月地激光通信鏈路不僅會受到地球、月球遮擋中斷外,還會受到日凌的影響,即當太陽、地球和飛行終端三者之間的角度SEP或SPE很小時,通信鏈路也有會發生中斷。圖5給出了一年內SEP和SPE角的變化曲線,由該曲線可知在統計時間內SEP角有50%的時間小于90°,意味著飛行終端將會長期受到地球日間天空背景光的干擾。同時,該環月終端對地鏈路的SEP或SEP角近似呈周期性變化,每隔約15天出現一次極小值;全年SEP角最小值0.031°出現在夏至日和冬至日,此時入射至接收視場內的太陽光強度將遠高于激光信號強度,造成通信失效或者中斷。若選擇太陽規避角為3°,由仿真數據可知,一年內SEP角和SPE角均小于3°的時間占比為1%。太陽光的干擾將會減少月地鏈路的可用時間。因此,激光終端設計時需考慮日凌的規避措施以及抗日光干擾設計。
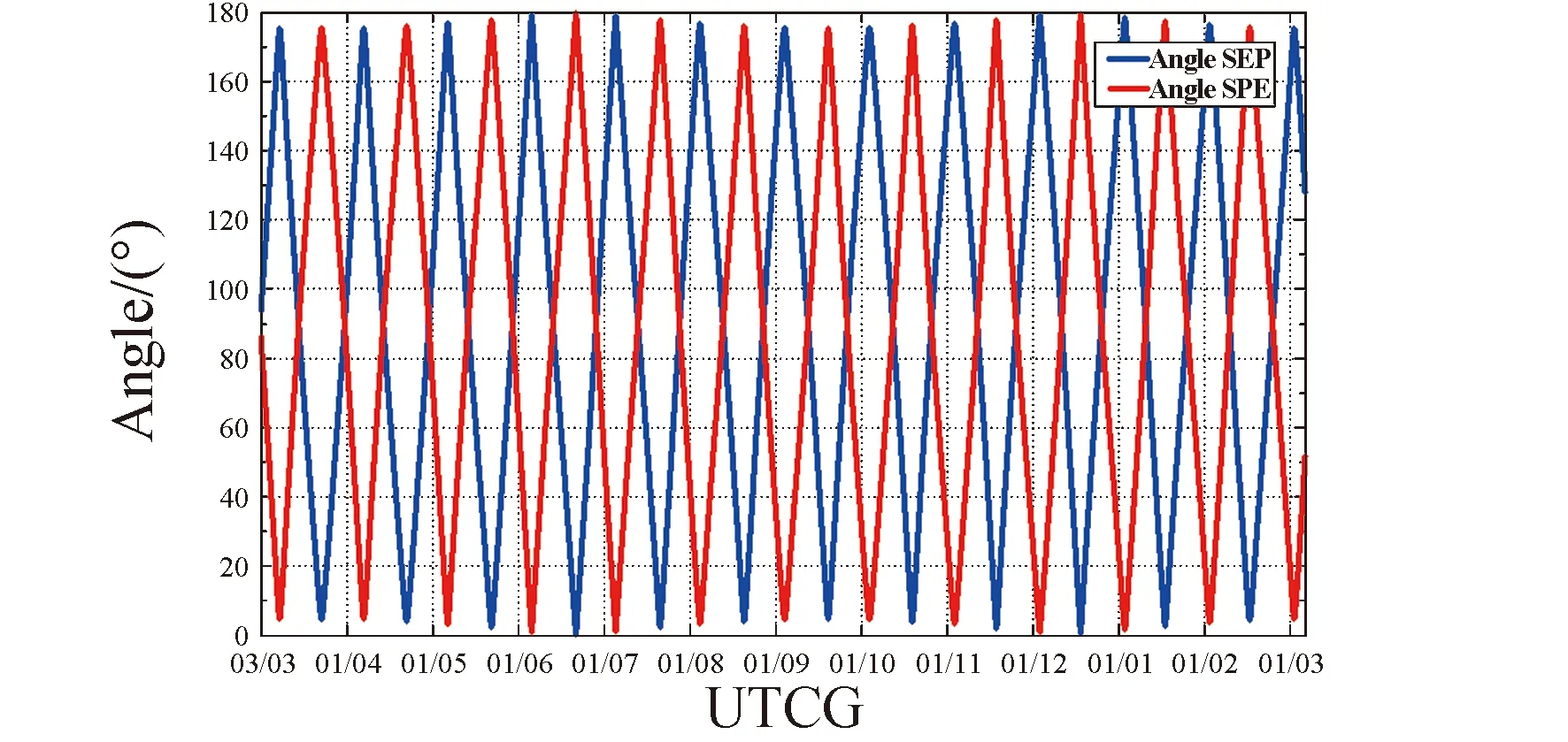
圖5 月地激光鏈路SEP和SPE夾角變化曲線Fig.5 SEP and SPE angle of lunar to ground laser link
3.3 鏈路跟蹤角度
月地激光鏈路在不同時刻所對應的跟蹤角度是動態變化的,跟蹤角度的大小將直接影響伺服轉臺的結構形式。因此,為了設計合理的伺服轉臺,在鏈路設計時需首先分析鏈路跟蹤角度范圍。通過對一個月內環月終端相對兩個地面站鏈路運動數據的分析可知,環月終端相對兩個深空站的跟蹤角度范圍相近。由表2的數據可知,環月終端視軸的方位角變化范圍約為-180°~+180°,方位角速率變化范圍約為-1~+1(°)/s,俯仰角變化范圍為-19°~+89.7°,俯仰角速率變化范圍為-0.05~+0.05(°)/s。圖6給出了環月終端相對阿根廷站的跟蹤角度變化曲線。
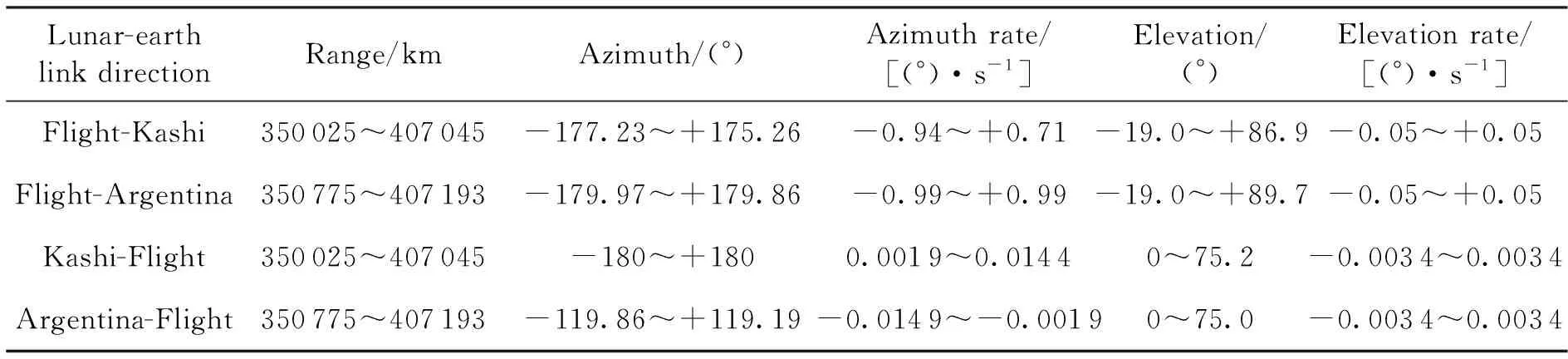
表2 鏈路距離及跟蹤角度仿真數據Table 2 Simulation of link distances and tracking angle
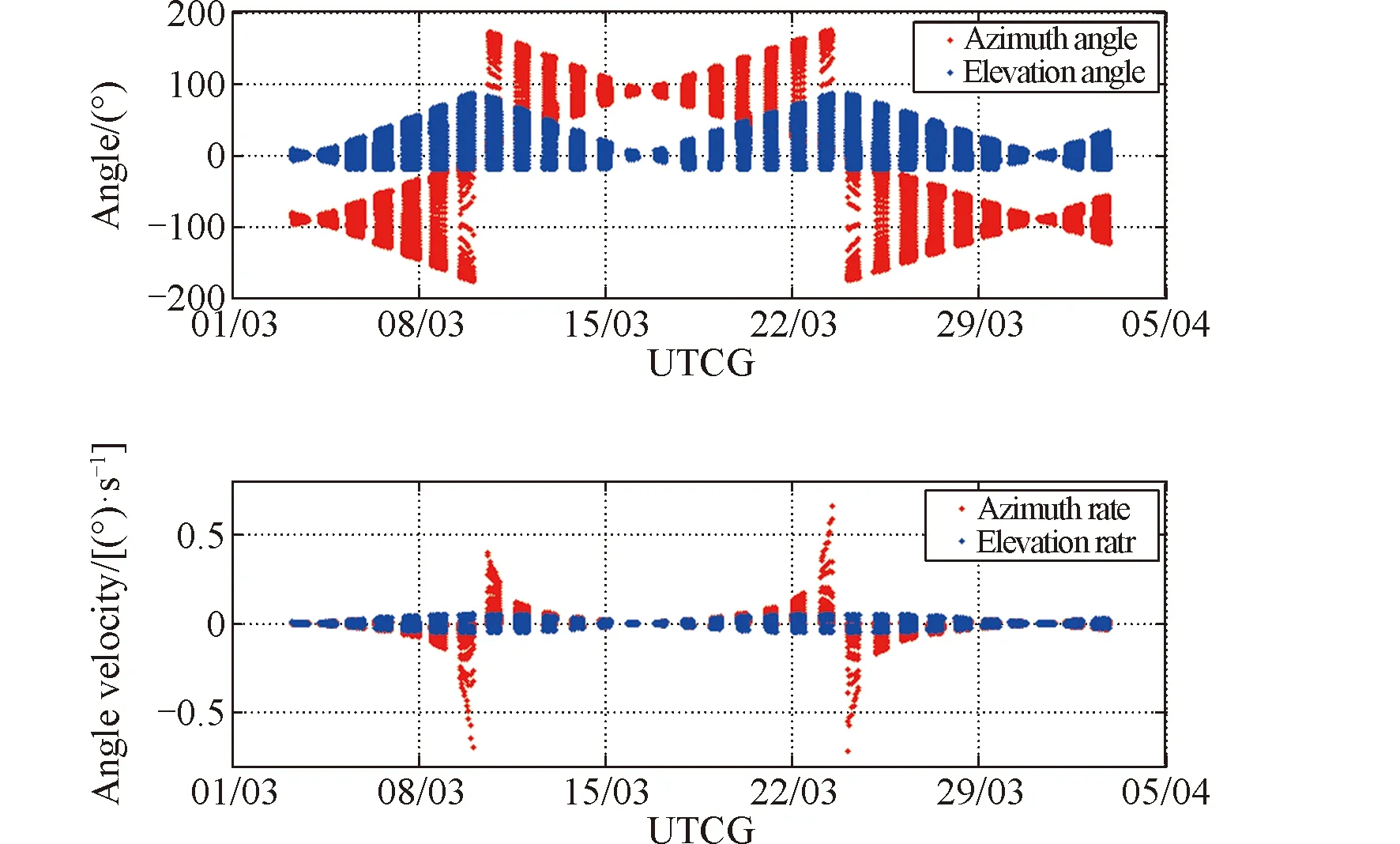
圖6 環月終端相對喀什站鏈路跟蹤角度變化曲線Fig.6 Tracking angle of link between circumlunar terminal and Kashi station
由表2可知,地面站視軸的方位角變化范圍為-180°~+180°,方位角速率變化范圍為-0.0149 ~+0.0019(°)/s,俯仰角變化范圍為0°~+75.2°,俯仰角速率變化范圍為-0.0034~ +0.0034(°)/s。圖7給出了喀什地面站相對環月終端的跟蹤角度變化曲線。

圖7 喀什站相對環月終端鏈路跟蹤角度變化曲線Fig.7 Tracking angle of link between Kashi station and circumlunar terminal
由前文分析可知,對于月地激光鏈路,還須考慮因相對運動和時間延遲引起的提前指向角,通過仿真及式(6)求解得到對月地直接信息傳輸鏈路和月地中繼信息傳輸鏈路兩種場景的提前指向角變化曲線。為統計提前指向角的周期變化,給出了環月衛星到喀什地面站鏈路一個半月內的提前指向角變化情況如圖8所示,此時提前指向角的變化范圍為0~18.2μrad。因此,須對月地激光鏈路進行指向角度的提前量補償。
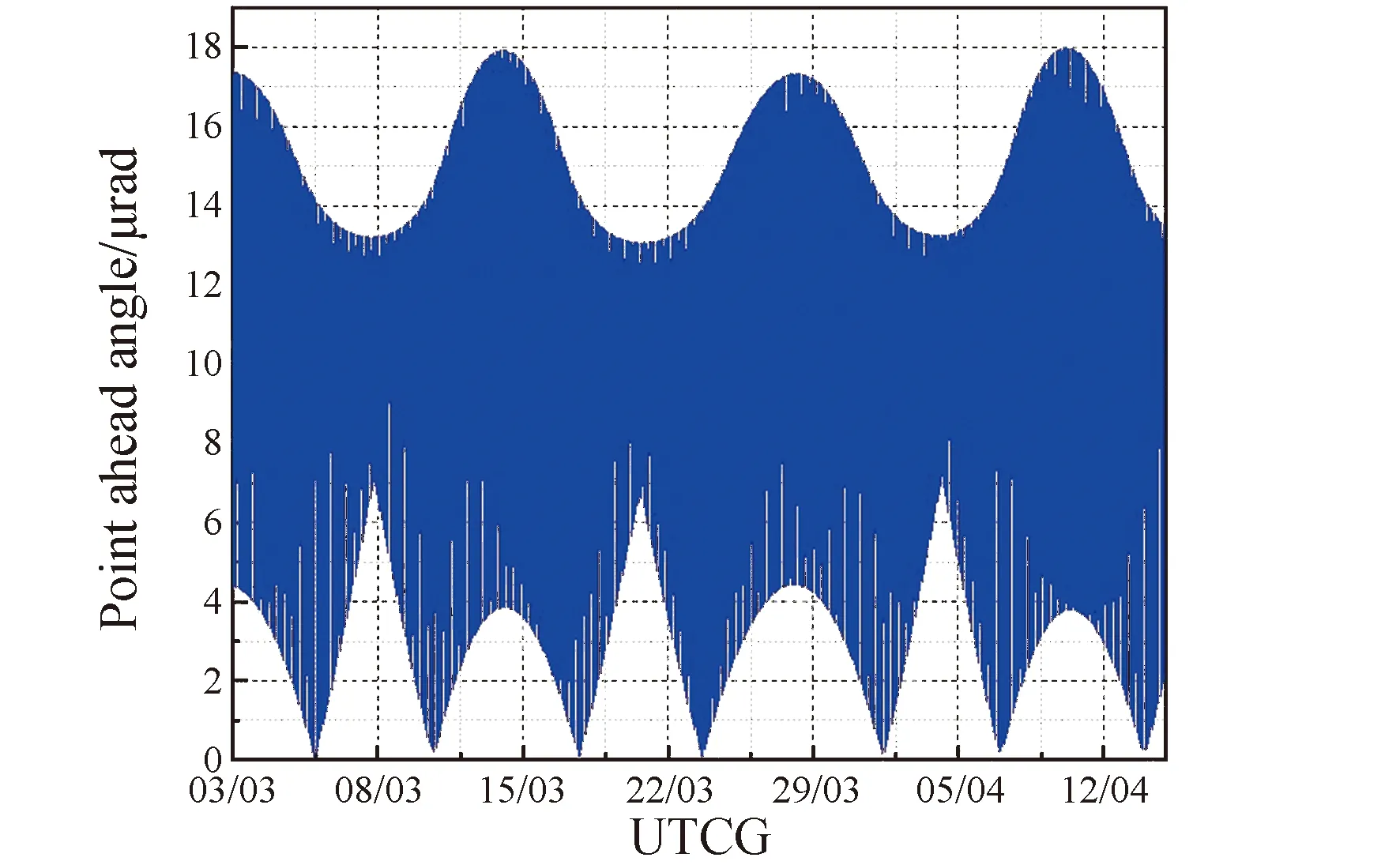
圖8 環月終端相對喀什站鏈路提前指向角度變化曲線Fig.8 Point ahead angle of link between Kashi station and circumlunar terminal
3.4 鏈路多普勒頻移
根據仿真結果可知,月地間的多普勒頻移呈現近似周期的變化。圖9給出了一個月內,環月飛行終端到地面站的激光多普勒頻移變化曲線。可知,當激光波長為1550nm時,對應的多普勒頻移量約為±1.28GHz,多普勒頻移變化速率達1MHz/s。通過上述分析,在通信體制選取時需考慮上述多普勒頻移的變化特性。

圖9 環月飛行終端-地面站激光多普勒頻移Fig.9 Doppler frequency shift between ground station and circumlunar terminal
4 月地激光通信鏈路設計建議
4.1 激光通信體制選取
通信體制的選取是開展月地激光通信鏈路設計的第一步。由國內外深空激光通信發展歷程可知,空間激光通信體制主要有OOK調制/直接探測、PPM調制/直接探測兩種非相干探測體制以及DPSK調制/自差接收、PSK調制/相干接收兩種相干探測體制。其中,PPM調制/直接探測體制帶寬利用率低,不利于高速率通信。但該體制信號光脈沖時隙占空比低,在平均激光功率受限的條件下,易于獲取更高的脈沖峰值功率;同時,由于該體制可采用超導納米線單光子探測器,因此可以實現單光子的接收靈敏度。上述兩種因素使得該體制更適用于碼速率要求不是太高,但鏈路距離遙遠的月地及深空激光鏈路[19]。此外,對于本文分析的環月飛行終端到地面站的激光多普勒頻移變化特性,采用PPM調制/直接探測體制可以適應±1.28GHz的多普勒頻移量和1MHz/s的多普勒頻移變化率。
綜上分析,對于體積、重量和功率嚴格受限的月地及深空激光鏈路,其對高效率發射和高靈敏度接收的需求遠高于其他因素。因此,綜合對比各通信體制的技術復雜度、接收靈敏度及適用場景,PPM調制/單光子探測體制是當前月地及深空激光通信的首選。
4.2 月地激光通信鏈路功率預算
月地激光通信下行鏈路為高速通信。結合前文鏈路運動特性分析,對月地直接信息傳輸下行鏈路開展功率預算分析,月地激光通信鏈路方程滿足如下關系:
式中:Pt為信號光發射功率;Pr為接收光功率;Gt為天線發射增益;Gr為天線接收增益;ηt為光學系統發射效率;ηr為光學系統接收效率;ηP為對準失配損耗;Lz為自由空間損耗;ηother為其他損耗,包括大氣損耗和單光子探測阻塞損耗等;Dt為發射天線直徑;Dr為接收天線直徑;θ為離軸角度;θdiv為激光發散角;Z為通信鏈路距離。
根據表3所示的鏈路功率預算分析可知,若環月飛行終端采用1.55μm波段激光載波,當發射功率為4W,通信體制為16PPM,發射束散角40μrad時,深空激光地面站采用1.8m口徑的接收天線和超導納米線單光子探測器陣列接收,可實現月地410000km下行的622Mbit/s通信速率,對應鏈路功率余量為3.4dB。后續對超導納米線單光子探測器的探測效率、解調損失等性能進行優化,可以進一步提升月地激光鏈路的通信速率,以滿足未來月地激光通信鏈路的應用需求。
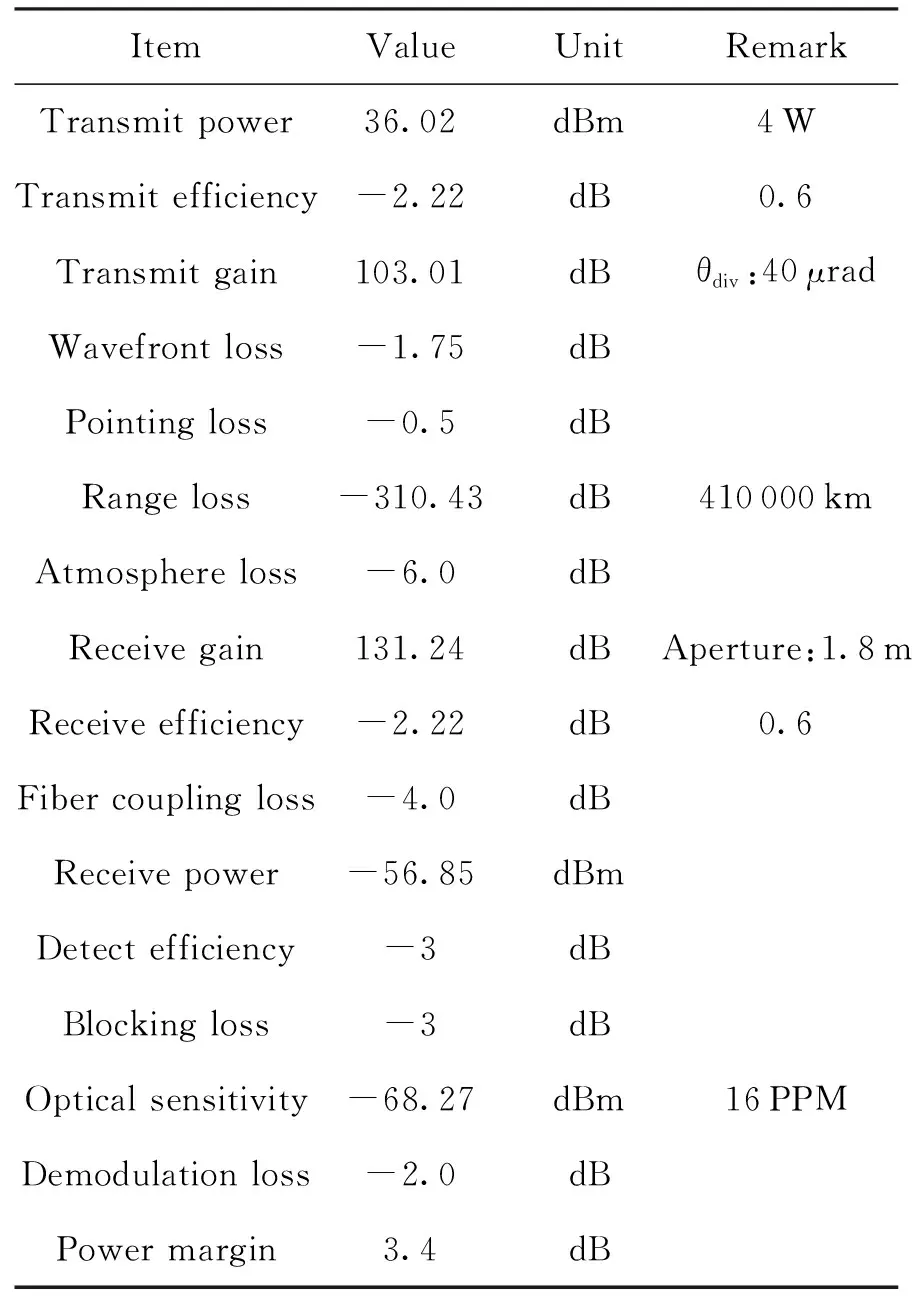
表3 月地直接信息傳輸下行鏈路功率預算Table 3 Power budget of lunar to ground laser link
5 結論
結合中國深空地面站的分布特點,依據月地激光通信鏈路的運動特性以及功率預算分析結果可知,若環月飛行終端采用1.55μm波段激光載波,當發射功率為4W,通信體制為16PPM,深空激光地面站采用1.8m的接收天線和超導納米線單光子探測接收時,可以實現月地下行622Mbit/s通信速率。以上分析和設計可為中國月地激光通信系統的設計提供一定參考。