火星次表層探測雷達展開機構設計與試驗
2023-11-18 05:24:06黎彪張從發盛聰樊俊峰劉冬
中國空間科學技術 2023年5期
黎彪,張從發,盛聰,樊俊峰,劉冬
北京空間飛行器總體設計部,北京 100094
1 引言
次表層探測雷達能獲取火星土壤層、沉積層和冰層等地質結構的科學數據,對研究火星生命生存的條件和環境信息具有重要的意義[1-2]。中國“天問一號”次表層探測雷達由兩根5m和兩根4.5m天線組成[3-4],由于探測器上可布置雷達的空間有限,要求單套天線的收攏包絡不能超過0.4m×0.2m×0.2m,在軌的溫度環境惡劣,因此,次表層探測雷達的關鍵技術之一是天線展開機構的研制[5-6]。
國外典型的火星次表層探測任務包括2003年歐空局發射的火星快車(Mars Express)和2005年美國NASA發射的火星勘測軌道器(Mars Reconnaissance Orbiter,MRO)[7]。火星快車上次表層探測雷達MARSIS由兩根20m長和一根7m長的天線組成,其三根天線均采用“碳纖維管+大變形復合材料鉸鏈(foldable flattenable tubes,FFT)”連接而成,其中20m長天線通過12個大變形復合材料鉸鏈將13段碳纖維管連接而成[8-9]。MARSIS展開機構具有非常輕的質量,但運動自由度達到了13,展開時序不唯一。且展開鎖定的沖擊力矩導致復合材料鉸鏈存在到位后再次收攏的風險,以上問題導致了MARSIS在軌展開多次推遲[10-11]。火星勘測軌道器的淺表層探測雷達(SHAllow RADar PayLoad,SHARAD)由兩根5m長的天線組成[12],2根天線均由4根碳纖維管通過3組鉸鏈鉸接而成,其收攏體積為1.4m×0.2m×0.15m。SHARAD采用了渦卷簧驅動的金屬鉸鏈,并通過繩索聯動裝置實現了不同碳纖維管的運動聯動,其方案簡單可靠,但收攏體積大,無法實現“一星四套載荷”的布局。
本文針對“天問一號”次表層探測雷達展開機構的收攏包絡小的難題,提出一種具有大收納比的新型雷達展開機構,分析此機構方案的優缺點,對展開機構的性能進行分析和測試,以期促進此類天線展開機構在國內航天任務中的應用。
2 次表層探測雷達展開機構方案設計
卷筒式伸桿機構(spiral tube and actuator for controlled extension and retraction,STACER)是一種線性展開機構,其具有小收攏包絡、大展開長度等優點,因此被選定為次表層探測雷達的展開機構。
2.1 卷筒式伸桿機構的組成和工作原理
卷筒式伸桿機構的組成如圖1所示,主要由彈性卷筒、輔助展開組件、頂桿組件、儲藏罐和壓緊釋放裝置組成[13-14]。
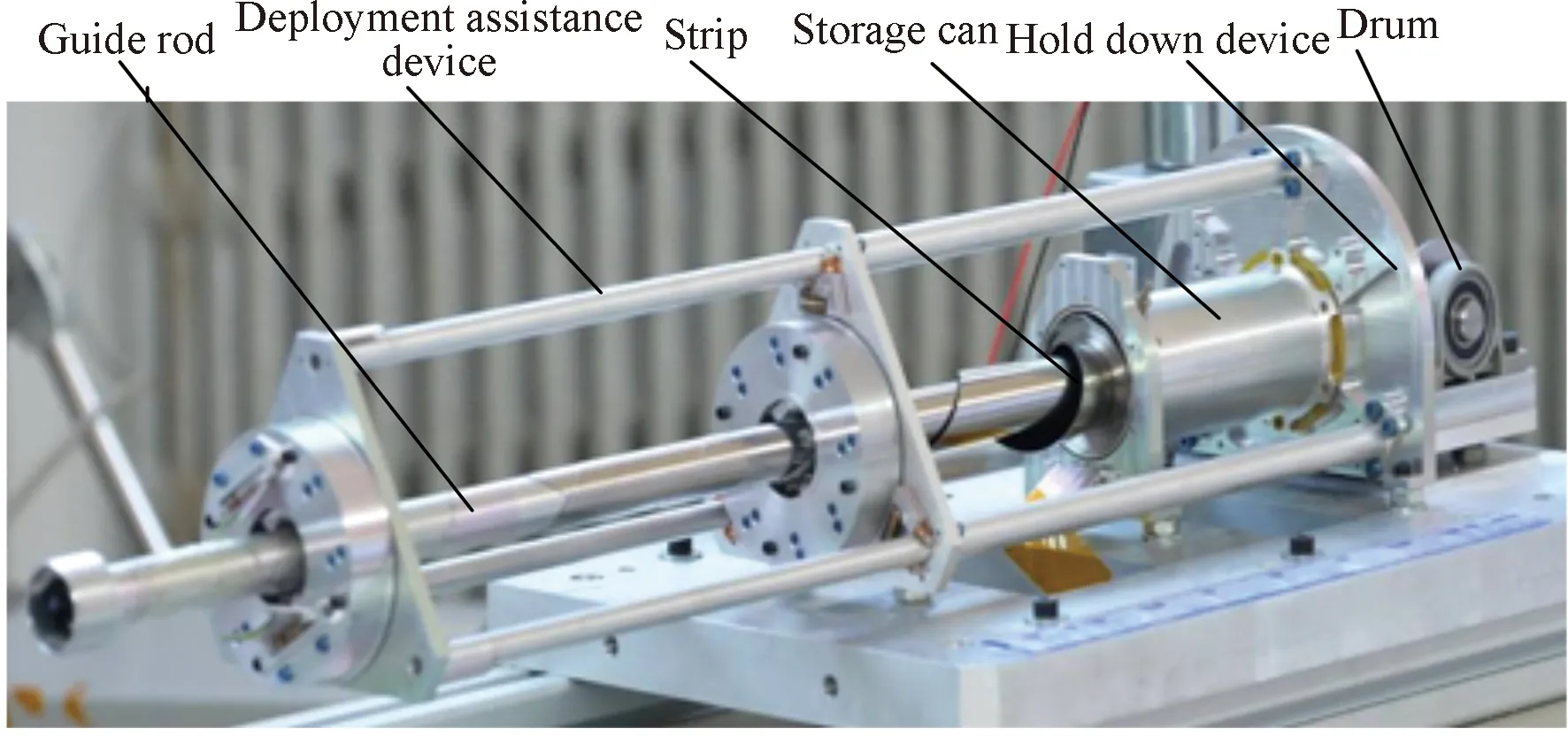
圖1 卷筒式伸桿機構組成Fig.1 Composition of the STACER
其中,彈性卷筒是由金屬薄帶纏繞加工而成,其具有等直徑、等螺旋角的加工特性,在外力的作用下,彈性卷筒能夠有序層疊,可收攏在機架的儲藏罐組件中。頂桿組件為中空的金屬管件,其與彈性卷筒通過鉚釘連接,在彈性卷筒初始展開時起導向作用。頂桿的末端固定有凱夫拉繩索,繩索穿過引金屬管件內腔后,繩索另一端固定在線纜繞筒中的繞線輪上,收攏狀態下,其余繩索整齊纏繞在繞線輪上。啟動展開組件由三組相同的套筒機構并列組成,每組套筒機構中安裝有圓柱彈簧,可以在彈性卷筒的展開初期提供額外的驅動力,以保證初始幾圈彈性帶材能夠順利從收攏狀態變化至展開狀態。
收攏狀態時,彈性卷筒被壓縮收攏在儲藏罐中,此時彈性卷筒具有較大的應變能,機構由壓緊釋放裝置提供壓緊的約束。根據指令解除約束后,啟動展開組件促進彈性卷筒展開,啟動展開組件展開到位后,彈性卷筒繼續驅動頂桿向前運動,直至彈性卷筒展開至設計長度。展開過程中,卷筒式伸桿機構的運動簡圖如圖2所示。
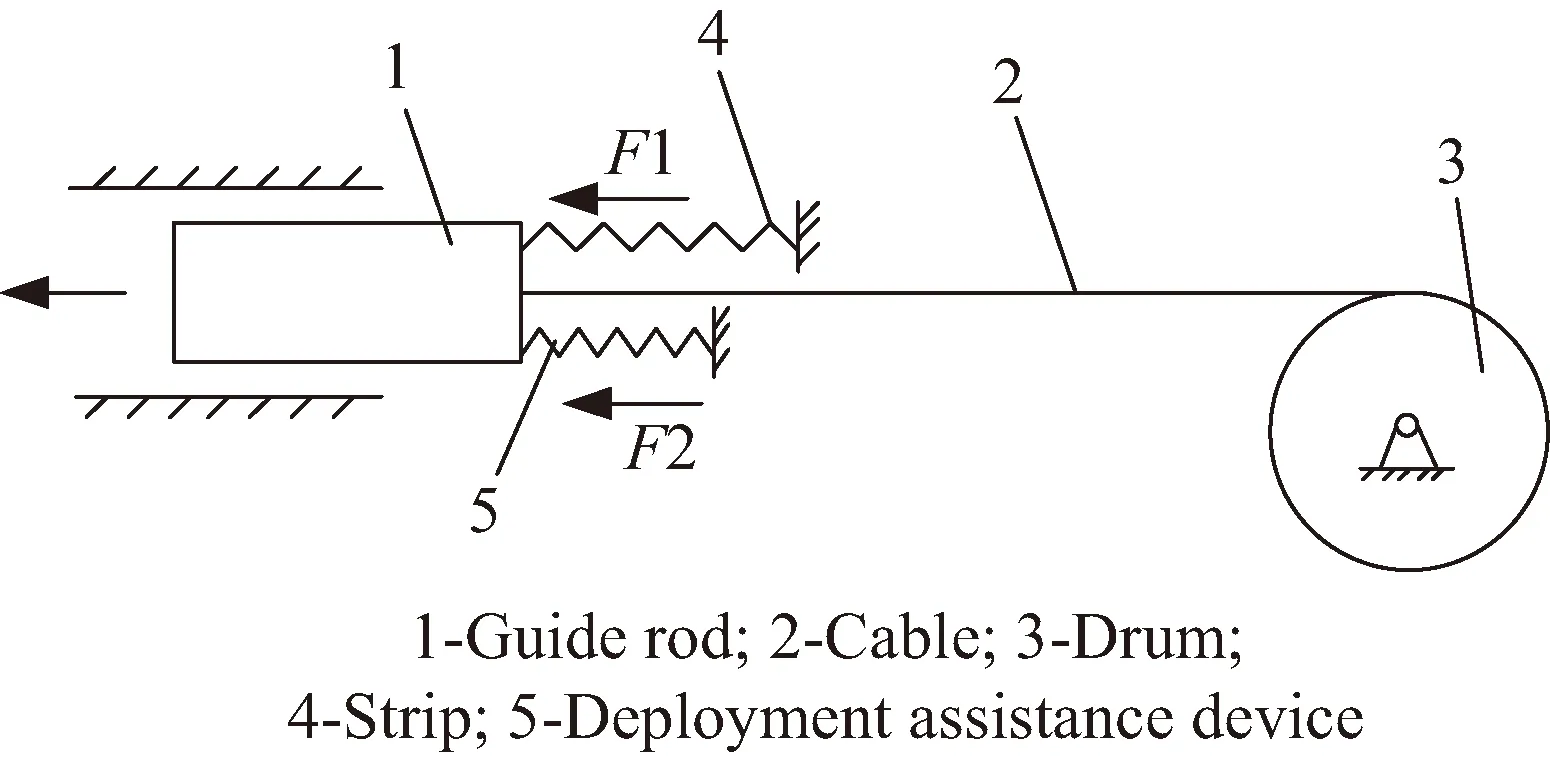
圖2 卷筒式伸桿機構運動簡圖Fig.2 Kinematic sketch of STACER
由圖2可知,壓緊釋放裝置起爆解除了頂桿的約束后,在彈性勢能作用下,彈性卷筒和啟動展開組件分別提供驅動力F1和F2;在驅動力F1和F2的作用下頂桿開始展開,帶動固定在頂桿上的繩索運動,繩索運動將帶動繞線輪旋轉,啟動展開組件展開到位后,頂桿僅在彈性卷筒的彈性勢能下展開,直至繞線輪上繩索完全釋放,卷筒式伸桿機構展開到位。
2.2 彈性卷筒的工作原理
卷筒式伸桿機構的核心部件為彈性卷筒。彈性卷筒展開過程的工作原理示意如圖3所示。
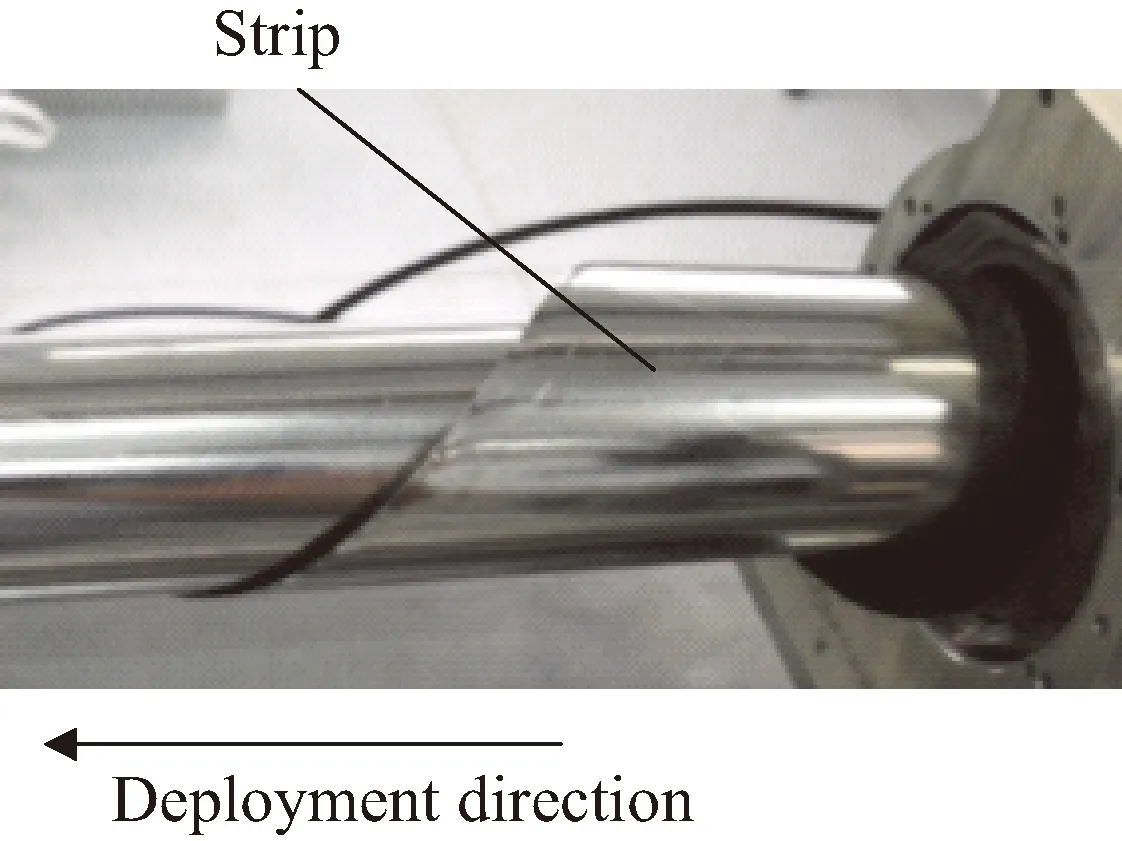
圖3 彈性卷筒展開工作原理Fig.3 Working principle for deployment of the STACER
彈性卷筒自然狀態為展開狀態,因此彈性卷筒需要在外力作用下克服其彈性能,從而收攏在儲藏內。收攏后通過壓緊釋放裝置進行約束,一旦解除約束,在彈性卷筒中的彈性能作用下,彈性卷筒將逐層伸展,釋放的首層包裹在頂桿上,釋放的后一層包裹在前一層上,通過頂桿直徑略大于彈性卷筒加工直徑的設計,保證彈性卷筒層間存在徑向作用力,從而在摩擦力和構型的雙重約束下保證彈性卷筒的整體剛度。
2.3 不同展開機構比對
不同次表層探測雷達用展開機構比對如表1所示。

表1 展開機構對比Table 1 Comparison among three deploy mechanisms
由表1可知:
1)為滿足次表層探測雷達天線的大尺寸要求,三個探測器上的天線均采用多段天線拼接的方案,減小了單根天線的展開長度,從而降低了展開機構的研制難度。
2)次表層探測雷達天線展開機構均采用彈性勢能釋放的無源驅動方式作為動力源,既可以減輕質量,又具有很高的溫度適應性,以應對深空超低溫環境。
3)MARSIS采用的大變形復合材料鉸鏈具有最小的線密度(總質量與長度的比值)。SHARAD采用渦卷簧鉸鏈,技術成熟、成本低廉、可靠性高。“天問一號”的卷筒式伸桿機構的展收比最大。
4)MARSIS的機構自由度為13,展開過程存在較大隨機性,而SHARAD和“天問一號”采用的機構均為單自由度,展開可控。
3 展開機構關鍵參數設計
次表層探測雷達展開機構的關鍵性能包括展開能力和展開后的穩定性能力,展開能力可通過驅動力表征,穩定性能力與展開后的剛度相關,可用展開后的基頻表示,這兩者均由彈性卷筒的構型參數決定。
3.1 彈性卷筒的構型參數
彈性卷筒展開狀態為含有一定螺旋角帶材組成的類金屬薄壁管,其構型參數見圖4。其中L為彈性卷筒的展開長度。

圖4 彈性卷筒的構型參數Fig.4 Mechanical parameters on stiffness of STACER
由圖4可知,構型參數包括:彈性卷筒半徑R、彈性卷筒加工螺旋角α,帶寬w和帶材厚度t。
3.2 卷筒式伸桿機構的基頻計算
根據彈性卷筒的試驗研究結果可知,彈性卷筒展開狀態為近似等螺距的螺旋管,p為任意圈螺旋線的螺距,見圖5。
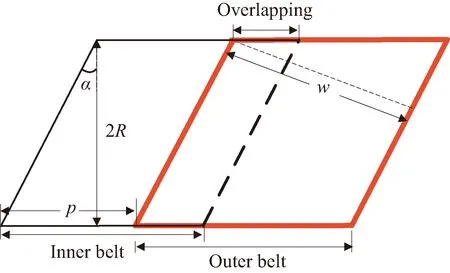
圖5 相鄰兩層彈性卷筒的重疊關系Fig.5 Overlap between adjacent belt
由圖5可知,螺距p與相關構型參數之間的關系為
p=2πR·tanα
(1)
根據等螺距的假設,可計算帶材的總長度及圓錐螺旋線的總長h為

(2)
式中:R0為根部半徑;Rt為末端半徑;α0為根部螺旋角;αt為末端螺旋角;δ為相鄰兩層圓錐薄帶平均半徑的差值。
則彈性卷筒加工使用的帶材質量m0為
m0=ρ·hwt
(3)
式中:ρ為彈性卷筒帶材的密度。
將彈性卷筒等效為連續體,根據瑞利商[15],可獲得彈性卷筒的圓頻率ω為
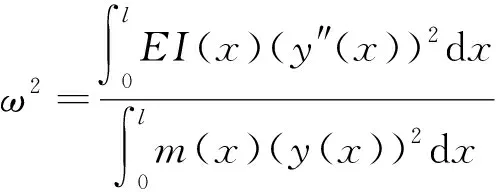
(4)
式中:E為帶材的彈性模量;m(x)為任意處微元的質量;I(x)為彈性卷筒任意處微元的慣性矩;y(x)為振型試函數,可采用慣性力作用下的變形形狀,表示為

(5)
聯合式(1)~(5),可采用數值分析的方法計算得到彈性卷筒的基頻。
3.3 卷筒式伸桿機構的驅動力計算
卷筒式伸桿機構經過過渡段后,由完全收攏狀態變化為完全展開狀態,因此,對彈性卷筒的驅動力研究需重點關注過渡段。
采用半物理仿真的方法,通過對彈性卷筒過渡段的形狀進行測量,可知彈性卷筒過渡段中,金屬薄帶形狀如圖6所示。

圖6 過渡段中帶材的形狀Fig.6 Strip shape in transition section
基于試驗研究和理論分析,構造出帶材的可能變形函數空間;隨后根據主應變給出帶材的變形能;最后,依據最小勢能原理以及變分方法,可獲取金屬薄帶的驅動力規律[16]。彈性卷筒在展開過程中的驅動力F與構型參數的關系為
[cos2(0.484β-0.688)-
cos2(1.484β-0.688)cosβ]2+
[sin2(0.484β-0.688)-
sin2(1.484β-0.688)cosβ]2}
(6)
式中:r為過渡段結束處對應的半徑,近似等于Rt;μ為泊松比;β為展開處的螺旋角。
由式(6)可知,驅動力與帶材的彈性模量、帶寬成正比,可根據式(6)對展開驅動力進行數值計算。
3.4 卷筒式伸桿機構性能預計
展開機構中彈性卷筒的構型參數如表2所示。
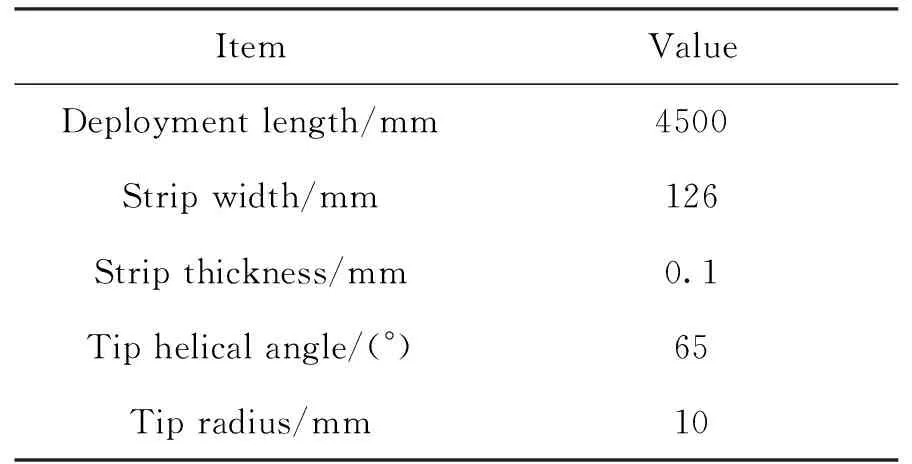
表2 彈性卷筒的構型參數Table 2 Configuration variables of STACER
根據式(1)~(6),采用數值分析可計算天線展開機構的性能參數如表3所示。

表3 卷筒式伸桿機構的性能Table 3 Performance of STACER
4 基頻和驅動力測試
4.1 基頻測試
采用位移激勵法進行了卷筒式伸桿機構展開狀態基頻的測試,測試原理見圖7。

圖7 展開狀態基頻測試Fig.7 Frequency test of deployed STACER
測試過程中,卷筒式伸桿機構處于豎直向上展開狀態,在頂桿組件頂端懸掛了氣球以抵消重力的影響,測試過程中,對頂桿組件頂端施加橫向的推力,使頂桿組件偏離平衡位置后釋放,隨后系統在彈性勢能作用下自由振動。在此過程中采用激光測振儀獲取系統的基頻。卷筒式伸桿機構基頻測試結果為0.885Hz,分析結果為0.83Hz,誤差為6.2%。
4.2 驅動力測試
設計了專用驅動力測試工裝,以獲取卷筒式伸桿機構展開過程的驅動力,測試過程如圖8所示。
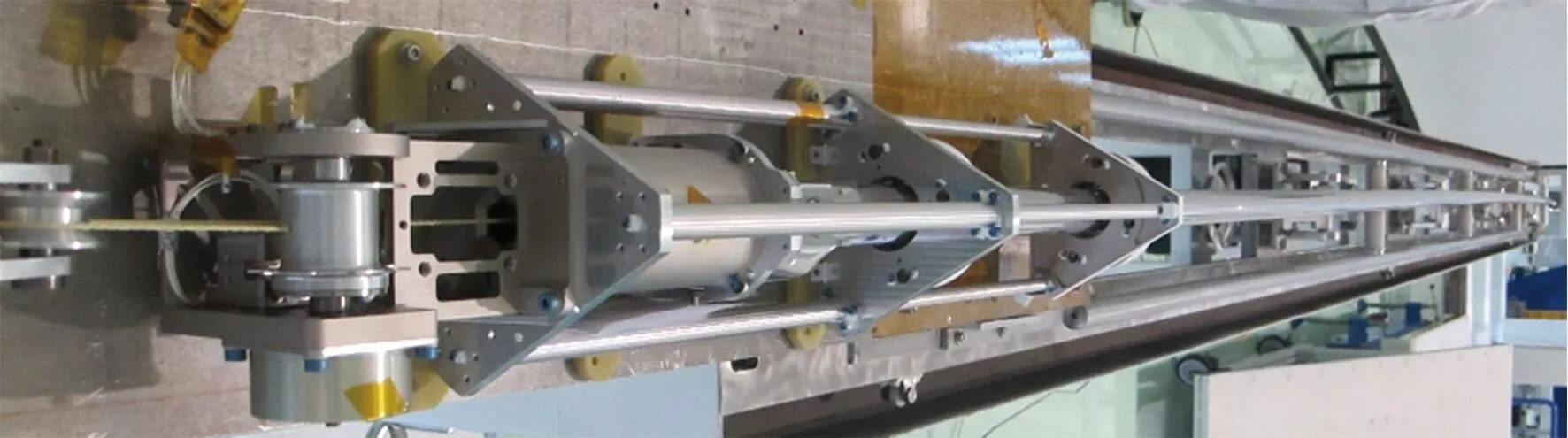
圖8 卷筒式伸桿機構驅動力測試Fig.8 Force test of STACER
將卷筒式伸桿機構放置在工裝上展開,展開過程中通過控制機構控制其展開速度,使其近似勻速展開,展開過程中通過拉力傳感器實時采集繩索上的拉力,即為卷筒式伸桿機構的驅動力。驅動力實測結果如圖9所示。

圖9 驅動力隨長度變化曲線Fig.9 Driving force of STACER
由圖9可知,在展開初始階段(0~0.25m),驅動力迅速由79.5N下降到23N左右,并且近似線性減小。其原因是初始階段驅動力由啟動展開組件和彈性卷筒一起提供,其中啟動展開裝置中的彈簧力最大值約為55N。
天線展開機構展開到0.25m后,啟動展開裝置已經展開到位,不再提供彈簧力對機構進行驅動。此后驅動力均由彈性卷筒提供,由圖9可知在此階段驅動力由23N下降到18N,可知驅動力預計值(表3)與測試結果基本一致。
5 結論
本文給出了火星次表層探測雷達展開機構的工作原理,對展開機構的基頻和驅動力開展了測試,將測試結果與分析結果進行比對,驗證了分析結果的正確性。可得到如下結論:
1)卷筒式伸桿機構是一種基于金屬變形的自驅動線性展開機構,具有輕質、大展收比、展開長度長、收攏體積小等優點,能解決天問一號中小收攏體積、大展開長度的難題,在需要多載荷的科學探測場合具有廣泛的應用前景。
2)天線展開機構的一階頻率和驅動力由彈性卷筒的帶寬、帶厚、末端半徑和螺旋角決定。卷筒式伸桿機構的一階頻率實測值為0.885Hz,分析值為0.83Hz,誤差為6.2%,驗證了基頻分析方法的正確性,該分析方法可應用于其他類似產品。
3)彈性卷筒的驅動力由金屬薄帶的彈性模量、帶厚、帶寬、過渡段結束處的半徑和螺旋角決定,實測卷筒式伸桿機構的驅動力在18N-23N之間,與分析值接近。