戰場海流對管裝魚雷反潛作戰效能影響分析
2023-11-18 12:13:24黃華紅陳嘉杰
水下無人系統學報 2023年5期
關鍵詞:影響
程 帥,李 斌,黃華紅,陳嘉杰
(中國船舶集團有限公司 第705 研究所,陜西 西安,710077)
0 引言
現代海戰中,潛艇扮演著十分重要的角色,潛艇的隱蔽性很強,可能會對我方的重要平臺和設施造成威脅。如何進行反潛作戰,提高反潛作戰效能,對于現代海戰至關重要[1]。
海洋環境復雜多變,復雜的海況不僅會影響聲吶對潛艇的探測能力,還會影響反潛武器的作戰效能[2]。海流對聲吶底噪聲分布、拖曳聲陣狀態具有一定影響,進而影響目標探測結果。魚雷作為主要反潛作戰武器,會受到海流施加的側向力影響,從而導致預定彈道偏移,同時由于海流的出現,魚雷自導探測能力也有一定減弱,綜合因素下影響作戰效能[3]。海流對潛艇目標的運動特性和探測特性也有一定影響,主要表現在2 個方面: 一是海流產生的各種作用力作用在潛艇平臺系統上,影響潛艇的位置信息;二是海流作為信息傳輸的媒介,對潛艇自身特征信號的向外輻射產生影響,增大目標運動要素的估計誤差[4]。在進行作戰效能分析時,可將潛艇的海流影響折合到水面艦探測的誤差模型中。
聲吶和魚雷作戰效能是反潛作戰運用的基本依據。目前我國水面艦已具備海流測試手段,根據當前海流流向,結合管裝反潛效能預估,就可以料敵于前,準確評估[5]。由于海洋環境復雜且隨機性很強,當前對海流條件影響分析的文章較少,且大多只是采用理論計算的方法,很少有結合模型的數學仿真方法[6],因此,建立海流的數學模型通過仿真手段分析管裝反潛打擊效能就顯得極為重要。
文中通過建立魚雷模型、自導檢測模型、聲吶誤差模型和海流數學模型,結合仿真軟件研究海流對反潛效能的影響,選取魚雷的命中概率作為其作戰效能的指標,分析不同海況下的魚雷作戰效能。
1 管裝反潛效能仿真機理
1.1 仿真原理
管裝反潛仿真原理如圖1 所示。
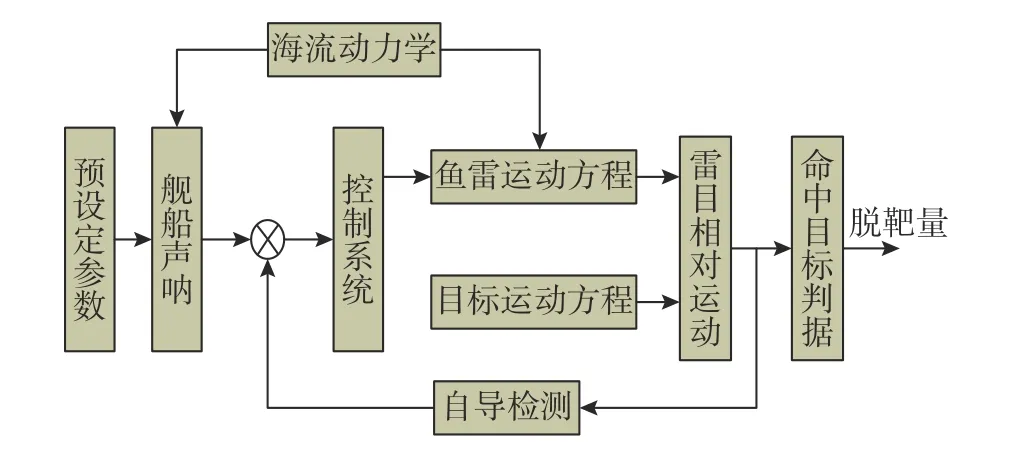
圖1 管裝魚雷反潛作戰仿真原理圖Fig.1 Simulation schematic of tube-launched anti-submarine operation
1.2 作戰流程想定
魚雷發射艦按照航向正北(0°方向),速度21 kn執行反潛作戰任務。目標潛艇位于魚雷發射艦北偏東30°/60°/90°/120°/150°,速度18 kn,航向0°。具體態勢想定示意圖如圖2 所示。
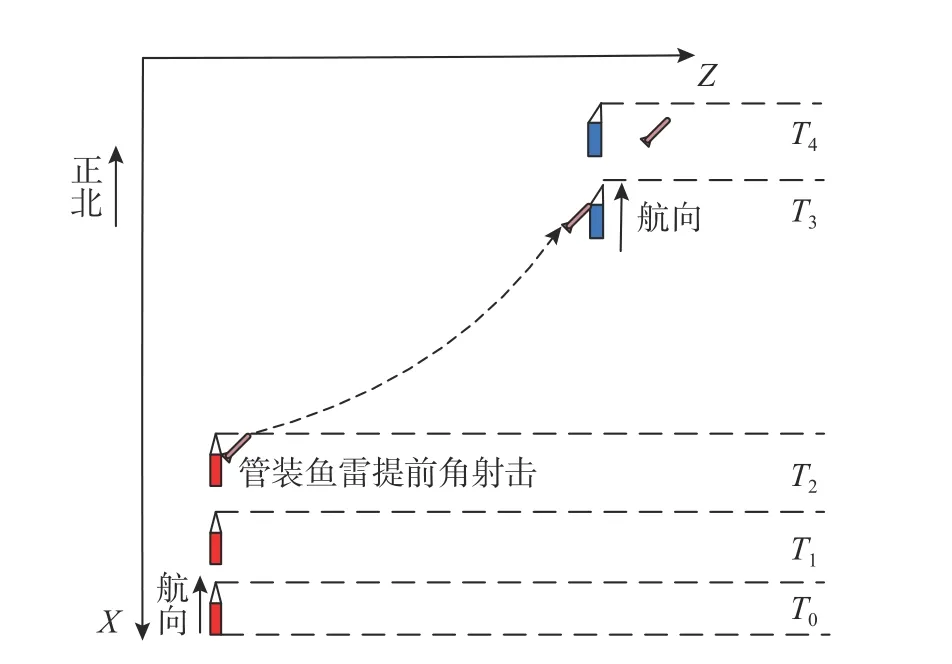
圖2 反潛作戰仿真態勢想定示意圖Fig.2 Simulation scenario of anti-submarine operation
圖中: 紅色為魚雷發射艦艇;藍色為目標潛艇;黃色為管裝反潛魚雷。
作戰流程為:
T0 時刻,魚雷發射艦聲吶探測到目標潛艇;
T1 時刻,指揮員下定作戰決心,命令魚雷發射;
T2 時刻,魚雷出管,在海流的作用下向目標潛艇航行;
T3 時刻,魚雷命中目標(結果一),仿真結束;
T4 時刻,魚雷航程耗盡,魚雷未命中目標(結果二),仿真結束。
2 魚雷運動模型
2.1 坐標系定義
建立魚雷運動涉及到地面坐標系o0x0y0z0、雷體坐標系oxyz以及速度 坐標系ox1y1z1等。雷體坐標系定義如下: 雷體坐標系原點位于雷體的浮心ox軸 沿雷體縱軸并指向雷體頭部,oy軸垂直于ox并指向上方(當雷體在地面上正常放置時),oz軸垂直于ox和oy軸,其方向使坐標系成為右手系(從雷體尾部向前看oz軸指向右側),如圖3 所示,地面坐標系、速度坐標系、速度、角速度和姿態角等物理量的定義及量綱參見文獻[7]。
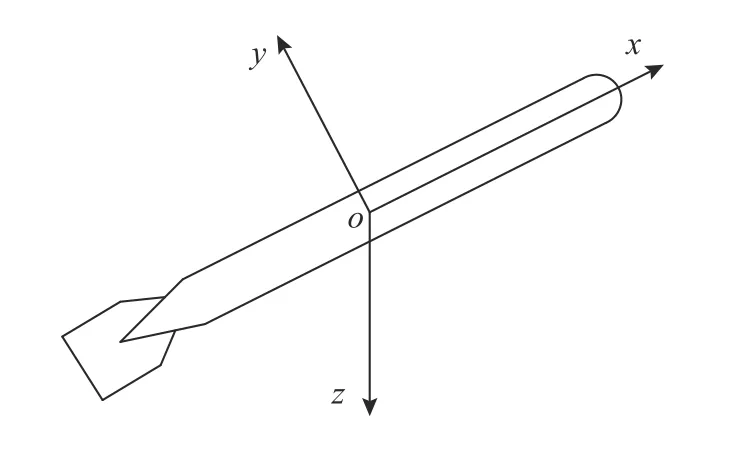
圖3 雷體坐標系Fig.3 Torpedo coordinate system
假設魚雷為六自由度剛體,通常用6 個坐標點來表示雷體坐標系在地面坐標系上的相對位置。6 個坐標點分別為雷體坐標系原點在地面坐標系中的坐標 (x0,y0,z0)和雷體坐標系與地面坐標系之間的3 個夾角 (ψ,θ,φ)。其中: ψ表示魚雷的偏航角;θ表示魚雷的俯仰角;φ表示魚雷的橫滾角。對于橫滾角,從尾部看向右為正;對于俯仰角,則是從尾部看向上為正;對于偏航角來講,從尾部看向左為正,如圖4 所示。
圖4 地面坐標系旋轉到雷體坐標系Fig.4 Ground coordinate system rotating to torpedo coordinate system
2.2 魚雷動力學方程
魚雷動力學方程建立在以浮心為原點的雷體系中,根據動量和動量矩定理建立魚雷的動力學模型,表達式為
其中,A為慣性矩陣,其表達式為
2.3 魚雷運動學方程
在地面坐標系中,魚雷浮心運動方程為
其中,雷體系到地面系的坐標轉換矩陣為
魚雷旋轉運動學方程表達式為
3 海流仿真模型
海流對作戰的影響主要在于海流對艦船聲吶、魚雷自導、魚雷運動和目標運動等方面的影響。海流對聲吶的影響主要體現在對目標運動要素解算上,對魚雷自導的影響體現在對自導作用距離上。在一定時空范圍內的海流可以看作是均勻定常海流,在作戰過程中,其對做定常運動的目標和魚雷的作用效果基本相同,但魚雷因為彈道的變換會進行機動,此時海流對魚雷運動的影響不可忽略。假設目標不進行對抗,目標運動基本可以看作是勻速定常運動,故海流對魚雷的運動影響較大。因此文中著重考慮海流對其他3 個因素的影響,忽略海流對目標運動的影響。
3.1 海流對艦船聲吶及魚雷自導的影響
在動態海洋環境中,海洋水文環境要素時空變化極其復雜。海洋水文環境主要是指海水物理、化學性質及海洋動力過程引起的海面和海水介質內部動態結構特征。其現象主要包括海浪、海流、潮汐和海冰等[8]。在實際應用中,海流對聲吶的影響比較大。具體表現為:
1) 海流會帶來運動平臺、魚雷、聲吶等姿態的不穩定,會導致聲吶基陣姿態、平臺各部位應力的變化,從而導致聲吶探測性能的不穩定[9];
2) 海流會產生額外的多普勒頻移效應,一定程度上改變聲場相干特性,影響聲吶的探測性能;
3) 海流作用于平臺表面所引起的水動力噪聲變化,影響聲吶的探測性能[10]。
假設海流對聲吶的方位影響角為?,其大小與船的速度和海流速度有關,即
式中:vt為艦船速度;vω0為海流速度;Ahl為海流流向角。?在反潛指揮控制中主要影響了聲吶的系統誤差和隨機誤差。
自導檢測模型可以歸結為對魚雷自導作用距離的研究,當目標落入自導接收波束的范圍和自導作用距離內且滿足自導捕獲目標判據時,認為發現目標。魚雷自導在海流的影響下,自導檢測模型也在靜水條件的基礎上降低了自導探測能力,增加了一定的系統誤差[11]。
考慮到海流對目標運動要素解算的影響,在仿真試驗中,按照當前海流的流向和流速對系統誤差進行修正,在原來誤差的基礎上增加海流引起的誤差,形成當前海流影響下的目標運動要素。
3.2 海流對雷體運動的影響
在魚雷運動模型的基礎上,結合海流數學模型,研究海流對魚雷彈道的影響。
海流對魚雷運動的影響主要取決于海流的速度。地面坐標系、地理坐標系以及海流矢量的相對關系見圖5。
圖5 地面坐標系、地理坐標系以及海流矢量的相對關系示意圖Fig.5 Relationship among ground coordinate system,geographic coordinate system and current vector
圖中:O0x0y0z0為地面坐標系;NUE為地理坐標系(北天東);vω0為海流流速;Ahl為海流流向角,方向定義如下: 0°代表正北,90°代表正東,180°代表正南,-90°代表正西;A0為目標方位角,即地面坐標系O0x0軸與正北的夾角,順時針為正。
海流的大小和方向與測試點的地理位置、距水面的深度以及距海底的高度有關,還與測試的時間有關,是空間與時間的隨機函數。假設海流速度為常量,計算公式為
式中,vωx0、vωy0和vωz0為海流在地面坐標系的3 個分量。當魚雷受海流運動影響時,相當于在原流場基礎上疊加海流流場,即
式中:vT0為魚雷在地面坐標系中的速度;vTω0為魚雷相對于海流的速度。
魚雷動力學模型中各運動學參數都是相對流體的,只有在無海流時,獲得的運動學參數才是相對于地面坐標系的,即
考慮海流影響,按式(9)對魚雷動力學模型初始條件進行修正,并從雷體坐標系轉換到地面坐標系,表達式為
式中: 上標“0”表示時間零點時的參數值,即初值;下標“0”表示地面坐標系中的參數值;、和表示無海流時魚雷的速度在地面坐標系中的初值。
同理考慮海流作用時的攻角、側滑角和彈道角等初值可以表示為
結合魚雷的運動學和動力學模型,推導出魚雷在海流中相對于地面坐標系的參數為
式中:t的時間起點為零點;x0(t)、y0(t)和z0(t)為t時刻雷體在地面坐標系中的位移;xω0(t)、yω0(t)和zω0(t)為海流坐標系中雷體3 個方向的位移;vTx0、vTy0和vTz0為t時刻魚雷速度在地面坐標中的3 個分量;vTωx0(t)、vTωy0(t)和vTωz0(t)為t時刻魚雷速度在海流坐標系下的3 個分量;Θ(t) 和 ψω(t)為地面坐標系中魚雷在t時刻的彈道傾角和彈道偏角[12]。
4 仿真結果與分析
假設海流為均勻定常流場,海流速度4 kn,流向角分別為0°,90°,-90°和180°。目標潛艇作勻速直線運動,不采取對抗手段。魚雷采用有利提前角發射方式,如圖6 所示,分別進行海流對管裝魚雷反潛仿真影響的研究。

圖6 海流方向示意圖Fig.6 Ocean current direction
發現目標潛艇時,發射艦距離潛艇5 km,潛艇真實速度為18 kn,航向0°,方位為北偏東30°、60°、90°、120°、150°;魚雷速度為42 kn。
仿真開始時刻為反潛打擊魚雷發射時刻。以仿真開始時刻發射艦位置為坐標原點,主動自導檢測: 目標12 dB,魚雷發射聲源級為220 dB,魚雷具有90%以上的發現概率。
魚雷與海流的夾角 δ為-180°~180°,分為以下6 種情況:
1) δ=0°時,魚雷的方向與海流方向相同,魚雷速度增加幅值最大,魚雷提前角無變化;
2) δ=-180°時,魚雷的方向與海流方向相反,魚雷速度減小幅值最大,魚雷提前角無變化;
3) -90°<δ <0°時,魚雷速度增加,魚雷提前角提前量減小;
4) -180°<δ<-90°時,魚雷速度減小,魚雷提前角提前量減小;
5) 0°<δ <90°時,魚雷速度增加,魚雷提前角提前量增加;
6) -90°<δ <180°時,魚雷速度減小,魚雷提前角提前量增加。
每種想定態勢下仿真1 000 次,得到魚雷的命中概率同魚雷與海流夾角的關系如圖7 所示。
圖7 魚雷命中概率與海流夾角關系Fig.7 Relationship between hit probability of torpedo and current angle
由圖7 可以看出,當海流與魚雷設定主航向夾角在0°~180°之間時,魚雷的命中概率相較于無海流時有著不同程度的提升;此時的魚雷由于海流的影響,提前角提前量變大。其中在0°~90°范圍內,雷速提升使魚雷可以更快地接近目標,其命中概率也有一定的提高;在90°~180°范圍內,盡管提前角提前量增加,但雷速降低,命中效果變化不明顯;當海流與魚雷航向的夾角在-180°~0°之間時,由于魚雷提前角提前量受海流影響變小,魚雷命中概率較無海流的情況下有所降低。
綜上所述,可以得出以下結論:
1) 在進行反潛作戰任務時,應考慮實際戰場環境中海流的影響,盡量選擇海流流向同魚雷航向成0°~90°時發射,有助于提高反潛魚雷的作戰效能。
2) 若海流與諸元解算的主航向夾角為負,應增加諸元海流修正模型,增大提前角提前量、調整搜索主航向等方式對魚雷航行過程中損失的提前量進行補償。
5 結束語
文中分析了海流對艦船聲吶和魚雷的影響,建立了魚雷模型、聲吶誤差模型和海流動力學模型,設定多種想定態勢,結合仿真軟件研究了不同海流影響下管裝反潛魚雷的作戰效能,得出了執行反潛作戰任務時不能忽略海流的影響因素,并根據當前態勢選擇合適的補償方法,從而達到更高的作戰效能,這樣才能料敵于前,準確評估。文中模型和結論為水面艦管裝魚雷射擊方案設計提供了借鑒,為精細化預估管裝反潛魚雷作戰能力、優化管裝反潛射擊參數提供支撐。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
知識經濟·中國直銷(2016年3期)2016-02-27 16:15:49
現代檢驗醫學雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學低年級版)(2011年3期)2011-01-01 00:00:00