(2-RPU+UPU)+(RR)混聯機構末端約束和運動耦合分析
2023-11-23 04:38:32曾達幸盧文娟王國永
農業(yè)機械學報 2023年10期
胡 波 高 添 曾達幸 盧文娟 王 帥 王國永
(1.燕山大學機械工程學院, 秦皇島 066000; 2.東莞理工學院機械工程學院, 東莞 523808;3.河北石油職業(yè)技術大學機械工程系, 承德 067000)
0 引言
混聯機構是機器人機構的重要分支,其中以兩轉動一移動(2R1T)并聯機構為重要組成部分的五自由度混聯構型[1-6]備受工業(yè)界青睞,以其為本體的混聯機器人得到了廣泛的應用,典型成功案例包括Exechon[1-2]、 Tricept[3-4]、 Sprint Z3[5-6]混聯機構等。這類機構中,Exechon機構由2-UPR+SPR型并聯模塊和RR型串聯機構組成。該機構運動副數目少且機構中存在過約束,這些特點帶來了整體機構精度和剛度等性能的提升。受Exechon機構啟發(fā),諸多學者提出了新的構型方案。李秦川等[7]提出了具有此類特點的含垂直交錯轉軸的2R1T機構,并綜合出了大量新型RPR類并聯機構構型[8],其中包括多種具有此類特點的并聯機構。JIN等[9]提了以2-RPU+SPR機構為并聯模塊的可用于飛機機翼裝配的五自由度混聯機構。路曼等[10]研究了類Exechon機構構型綜合、運動學和樣機研制問題。胡波等[11]提出了2-RPU+UPU機構,并證明了包括2-RPU+UPU、2-RPU+UPR、2-RPU+SPR等在內的23種機構實際上為運動學完全等效的并聯機構[12]。此類機構的研究也引起了其他學者的關注[13-14]。由于運動等效性質的存在,這23種并聯機構和RR模塊組成混聯機構時,其末端約束和運動特性具有共性,只需以其中一種(2-RPU+UPU)+(RR)機構研究為例即可。實際上,由2-RPU+UPU機構和RR模塊組成的混聯機構的研究還并不完善。
在少自由度混聯機構的機構分析方面,以往研究通常將混聯機構分成獨立并聯機構和串聯機構分別研究,認為整體混聯機構的理論模型是獨立機構的簡單疊加,忽視了對整體混聯機構理論建模的研究和分析。末端約束分析是少自由度混聯機構分析的重要內容[15-18],是開展機構分析和綜合的基礎,針對串聯機構和并聯機構的約束分析一直是機構學的研究熱點,并且其研究已經相當成熟。然而,針對混聯機構的整機末端約束分析實際非常少見,僅見文獻[17]分析了5自由度Exechon混聯機構的整機末端約束。針對(2-RPU+UPU)+(RR)混聯機構的末端約束分析尚未見報道。
末端運動耦合是少自由度機構的重要特性,與末端具有六自由度運動的機構不同,少自由度機構末端六維移動和轉動參數之間存在著相互耦合關系,在計算反解過程中不能任意給定,必須首先通過體現末端位姿耦合關系的方程求解末端可行六維位姿參數。在這一問題的處理上,目前多結合伴隨運動[19-20]的求解方式得到機構運動耦合關系。然而由于(2-RPU+UPU)+(RR)混聯機構具有不同于傳統并聯機構的末端運動耦合形式,其末端運動耦合并未能妥善解決。
為解決(2-RPU+UPU)+(RR)混聯機構中存在的末端約束和運動耦合問題,本文采用Grassmann-Cayley代數求解該機構的末端約束,并結合整體機構的約束方程,通過消元得到只含末端6維位姿參數的末端運動耦合模型,以期為(2-RPU+UPU)+(RR)機構提供解析化的末端約束和運動耦合模型。
1 (2-RPU+UPU)+(RR)機構末端約束分析
1.1 混聯機構描述
如圖1所示,混聯機構由2-RPU+UPU型并聯模塊和RR型串聯模塊組成。2-RPU+UPU型并聯模塊由動平臺n1、定平臺n0、2條結構相同的RPU分支ri(i=1,3)和1條UPU分支r2組成。定平臺n0和動平臺n1均為三角形結構,其中心分別為p0和p1,端點分別記為ai和bi(i=1,2,3)。3條分支呈對稱分布,并均將P副作為驅動副,RPU分支ri(i=1,3)通過R副與定平臺n0上的ai(i=1,3)連接,并通過U副與動平臺n1上的bi(i=1,3)連接,UPU分支r2通過U副與定平臺n0上的a2連接,并通過U副與動平臺n1上的b2連接。并聯模塊中的每個U副均由轉軸相互垂直且相交的R副組成,設R1ij表示第i條分支上的第j個R副。
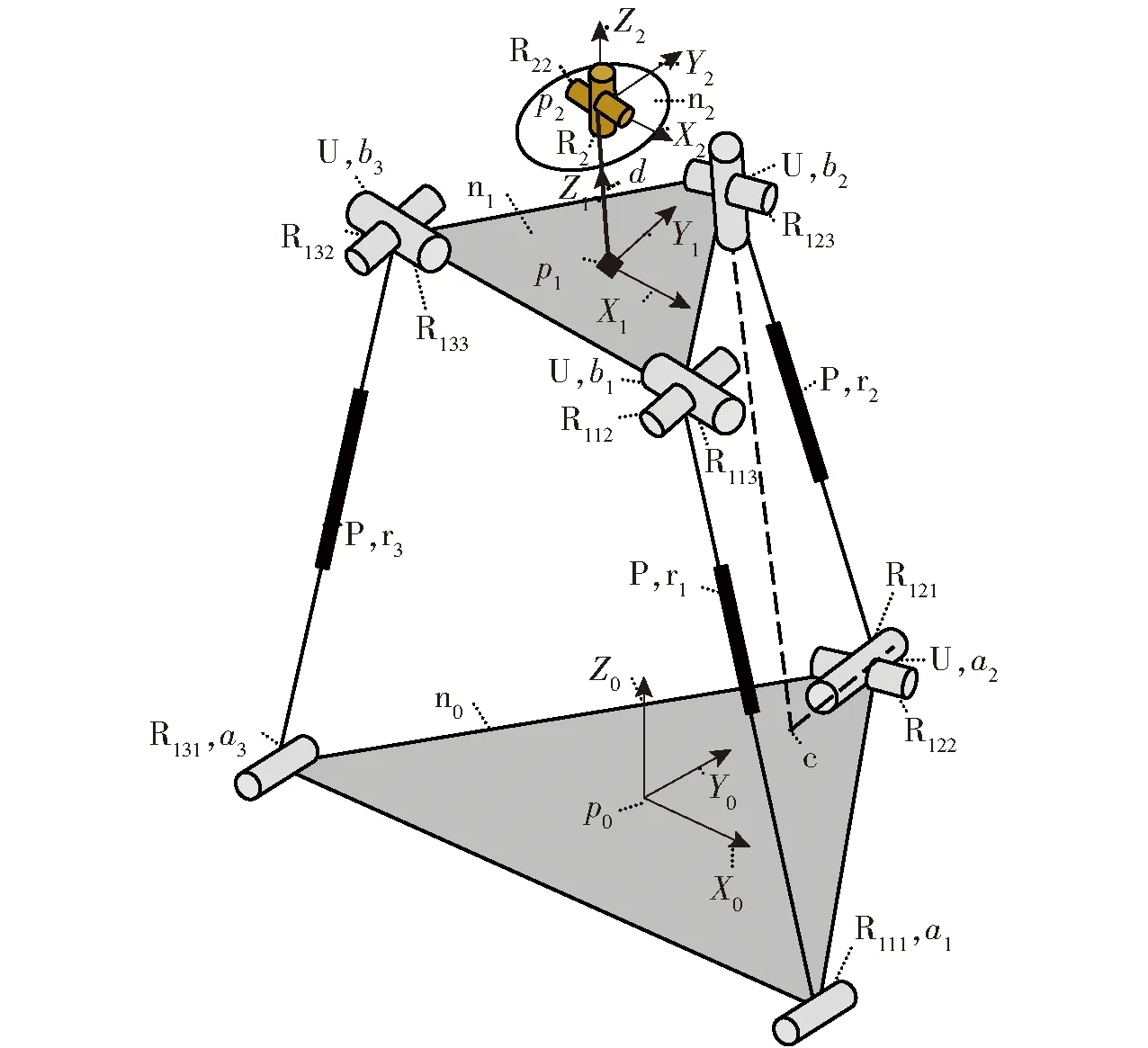
圖1 (2-RPU+UPU)+(RR)型混聯機構示意圖Fig.1 Sketch of (2-RPU+UPU)+(RR) type hybrid mechanism
定義:并聯模塊中的各個運動副滿足如下關系R1i1⊥a1a3,R1i1⊥ri,R1i1‖R1i2,R1i2⊥R1i3(i=1,2,3),R1i3|b1b3(i=1,3),R121|p0a2,R121⊥R122,R122‖R123,R123⊥ri,R123⊥R124,R124⊥n1。
RR型串聯模塊由剛性連桿d、R21和R22組成,連桿d始端與p1固連,末端點為p2,R21和R22相交于p2。串聯模塊中的兩個運動副和連桿、平臺滿足幾何關系d|R21,R21⊥n1, R21⊥R22。
1.2 混聯機構末端耦合約束求解方法

(1)
為解決式(1)的螺旋系求交問題,在此引入Grassmann-Cayley代數。Grassmann-Cayley代數是一個功能強大的數學工具,在并聯機構/混聯機構運動學和奇異性分析領域已有多個成功案例[21-22]。其交運算可應用于求解不同線性空間的交空間,可將其應用于兩個螺旋系的求交運算。

C=w1∨w2∨…∨wk
(2)
在Grassmann-Cayley代數中,將C稱為k階extentor。
設M和N分別是兩個l維空間內的i階和j階梯extensor,M=m1∨m2∨…∨mi(M=m1m2…mi),N=n1∨n2∨…∨nj(N=n1n2…nj)。M和N的求并運算可由其exterior product表示為
M∨N=m1m2…min1n2…nj
(3)
若i+j≥d,M和N的求交運算結果是一個i+j-d階的extensor
M∧N=∑sgn(σ)[mσ(1)mσ(2)…mσ(d-j)n1n2…nj]·
mσ(d-j+1)mσ(d-j+2)…mσ(i)
(4)
式(4)為Grassmann-Cayley代數的混續(xù)積公式,其中[·]為行列式的簡寫,和運算是σ的所有排列組合,滿足:σ(1)<σ(2)<…<σ(d-j),σ(d-j+1)<σ(d-j+2) <…<σ(i)。
1.3 (2-RPU+UPU)+(RR)機構末端約束及自由度
在點p0、p1、p2處分別建立坐標系{ni}(i=0, 1, 2),則{n0}和{n2}分別對應基坐標系和末端坐標系,各坐標軸滿足的幾何關系為:X0‖a1a3,Y0⊥a1a3,Z0⊥n0,X1‖b1b3,Y1⊥b1b3,Z1⊥n1,X2|R22。設pxi、pyi、pzi為點pi在基坐標系{n0}下的坐標。
由文獻[12]知,該機構的第1、3分支中,存在一過U副中心平行于分支中R副的約束力FAi(i=1, 3)和垂直于U副平面的約束矩TAi,第2分支中存在過R121和R124交點c且平行于R122的約束力FA2。這5個約束螺旋線性相關,可取3個獨立的約束力構成其約束螺旋系,3個約束力螺旋可表示為
(5)
其中
fAi=R1j1dAi=bi-p2(i=1,3)
fA2=R122dA2=c-p2
式中Rijk——轉動副Rijk的方向矢量
bi、c、pi——點bi、c、pi的位置矢量
fAi——約束力FAi的方向矢量
dAi——參考點p2到FAi的矢徑
同樣,在RR分支中,由約束螺旋的觀察法[15]知分支中存在過R副交點的3個約束力FBi(i=1,2,3)和一垂直于R21和R22的約束矩TB1,對應的力螺旋可表示為
(6)
由獨立螺旋組成的螺旋系可通過各獨立螺旋的外積運算表示[22],則2-RPU+UPU機構約束螺旋系可表示為
(7)
RR機構約束螺旋系可表示為
(8)
將式(7)、(8)代入式(4),則整體混聯機構末端約束可表示為
(9)
式(9)為通過2個約束螺旋系求并運算得到的混聯機構末端約束的解析表達式。

(10)
式中λAi、λBi——常數
2 (2-RPU+UPU)+(RR)機構末端運動耦合解析

(11)
末端坐標系{n2}相對于基坐標系{n0}的旋轉變化可表示為
(12)
其中
(13)

點ai、bi在{n0}中可表示為
(14)
(15)

θ=π/6+(2π/3)(i-1)
式中E——點p0到點ai的長度
e——點p1到點bi的長度
2-RPU+UPU并聯機構的桿長計算式為
ri=|bi-ai|
(16)
令pxi、pyi、pzi分別表示點pi在坐標系{n0}的3個坐標值。在基坐標系{n0}中p2可表示為
p2=p1+dZ1
(17)

2-RPU+UPU機構的末端位姿耦合關系可表示為[11]
px1=pz1zl1/zn1
(18)
py1=(eym1-E)/2
(19)
xm1=0
(20)

(21)
(22)
由式(17)可知(2-RPU+UPU)+(RR)混聯機構的末端位置可表示為
px2=px1+dzl1
(23)
py2=py1+dzm1
(24)
pz2=pz1+dzn1
(25)
由該機構結構條件可知
zl1xl2+zm1xm2+zn1xn2=0
(26)
結合式(19)、(24),可得
py2=eym1/2+dzm1-E/2
(27)
結合式(20)、(21),可得
(28)
結合式(18)、(23)、(25),可得
(29)
由式(27)、(28)可得
(30)
由式(26)、 (29)可得
(31)
將式(29)、(31)代入式(22),化簡可得
(32)
由式(31)、(32)可得
(33)
由式(30)可得
(34)
將式(33)代入式(34),兩邊平方,消去zm1,可得

(35)
式(35)描述了5自由度(2-RPU+UPU)+(RR)混聯機構的末端位姿耦合關系,當給定5個獨立位姿參數時,剩余的1個位姿參數可由式(35)求出。
3 數值算例
設定(2RPU+UPU)+(RR)機構中,各平臺及連桿的尺寸為E=1.20 m,e=0.60 m,d=0.75 m。給定末端執(zhí)行器X和Z方向的位置坐標為:px2=-0.32 m,pz2=1.80 m,機構末端姿態(tài)按照XYX型歐拉角給定,對應歐拉角分別給定為:α=56°,β=-40°,λ=-80°,在給定以上5個位姿參數的基礎上求解未知位置參數py2。
將上述參數代入式(35),可得到關于py2的高次方程為

(36)
式(36)求解可得py2為-0.792 5、0.099 7、-0.220 5、-0.472 3 m。
結果可在軟件環(huán)境下構建機構的運動模擬機構得到驗證[24]。結果表明仿真結果與式(36)計算結果的第2組結果吻合。
以上述得到的末端6維位姿參數為基礎,(2-RPU+UPU)+(RR)機構的反解計算可得:r1=1.337 9 m,r2=1.148 0 m,r3=1.133 8 m,θ1=-35.201 2°,θ2=-4.579 9°。
在該位姿下,根據式(5)、(6)計算可得各子機構中的約束螺旋為

由式(9)計算可得該混聯機構的末端約束為
Sr=[-0.403 8 0.912 0 -0.071 8 0.617 4 0.749 7 -0.204 4]T
結果表明,此位姿下(2-RPU+UPU)+(RR)機構的末端約束為以0.449 2 m為節(jié)距的約束螺旋。
4 結論
(1)得到了(2-RPU+UPU)+(RR)混聯機構的末端約束和位姿耦合模型,為少自由度混聯機構的整機末端約束和運動耦合分析提供了有效的思路和方法。
(2)基于約束求交原理,結合Grassmann-Cayley代數建立了(2-RPU+UPU)+(RR)混聯機構的末端約束求解模型。在一般位形下,該機構的末端約束為一帶有節(jié)距的約束螺旋,其末端自由度形式為2R2T1H型運動。
(3)結合(2-RPU+UPU)+(RR)混聯機構的約束方程,通過消元建立了(2-RPU+UPU)+(RR)機構的末端運動耦合模型,從而獲得了該機構的末端6維可行位姿,并以此得到了該機構修正的反向運動學模型。