基于Cosserat理論的仿生魚骨連續(xù)型機(jī)器人靜力學(xué)分析
2023-11-23 05:00:02姚建濤朱坤明張軒浩
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2023年10期
關(guān)鍵詞:模型
周 盼 姚建濤,2 朱坤明 張軒浩
(1.燕山大學(xué)河北省并聯(lián)機(jī)器人與機(jī)電系統(tǒng)實(shí)驗(yàn)室, 秦皇島 066004;2.燕山大學(xué)先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室, 秦皇島 066004)
0 引言
農(nóng)業(yè)生產(chǎn)的特點(diǎn)要求農(nóng)業(yè)機(jī)器人具有適應(yīng)非工作環(huán)境和抓取非合作目標(biāo)能力。與傳統(tǒng)剛性連桿機(jī)器人相比,連續(xù)型機(jī)器人具有更好的靈活性、柔順性和人機(jī)安全性,在非結(jié)構(gòu)化環(huán)境作業(yè)和非合作目標(biāo)操作方面具有顯著的性能優(yōu)勢(shì),可應(yīng)用于農(nóng)業(yè)生產(chǎn)[1-2]、微創(chuàng)手術(shù)[3-11]、核反應(yīng)裝置維修[12]、搜索與救援[13-14]和空間探測(cè)[15-17]等領(lǐng)域。目前,其結(jié)構(gòu)主要包括單骨干[1,2,6,8-10,18-22]、同心管[7,23]和多骨干形式[5,24-29]。驅(qū)動(dòng)方式主要為氣動(dòng)人工肌肉[14,24,30-33]、繩索驅(qū)動(dòng)[1,2,6,8-10,12,19,20]、桿驅(qū)動(dòng)[3,5,26-28]、電活性聚合物[4,17,34-39]、形狀記憶合金[1,21,40-47]和磁驅(qū)動(dòng)[11,48-51]。其中,繩索驅(qū)動(dòng)的單骨干連續(xù)型機(jī)器人具有結(jié)構(gòu)緊湊、驅(qū)動(dòng)精度高以及負(fù)載能力較大等優(yōu)點(diǎn),可應(yīng)用于農(nóng)業(yè)采摘、醫(yī)療檢查、微創(chuàng)手術(shù)以及復(fù)雜腔體設(shè)備的檢測(cè)[1,2,8-10]。
單骨干連續(xù)型機(jī)器人的骨干結(jié)構(gòu)與其建模難度、運(yùn)動(dòng)靈巧度、輕量性以及負(fù)載能力緊密相關(guān)。從中間骨干的結(jié)構(gòu)形式出發(fā),與經(jīng)典的周向分布一系列圓盤的圓形彈性體的結(jié)構(gòu)形式不同,提出了由多個(gè)剛?cè)彳涶詈辖Y(jié)構(gòu)的仿生魚骨單元垂直交叉串聯(lián)而成的中間骨架構(gòu)成的連續(xù)型機(jī)器人[52]。該機(jī)器人結(jié)構(gòu)緊湊、質(zhì)量輕、靈活性高,具有更精確的理論模型以及規(guī)則和可控的變形。前期進(jìn)行了結(jié)構(gòu)設(shè)計(jì)、樣機(jī)制作、運(yùn)動(dòng)學(xué)分析以及應(yīng)用演示。
基于常曲率假設(shè)的建模方法常用于分析連續(xù)型機(jī)器人沒有外部載荷時(shí)的變形情況。對(duì)于連續(xù)型機(jī)器人被繩索驅(qū)動(dòng)并且受到外部負(fù)載時(shí),應(yīng)探索可變曲率連續(xù)型機(jī)器人模型來提高建模精度。目前,基于近似的方法包括分段恒定曲率模型[19,53-55]、Bézier曲線擬合[6]和偽剛體模型[56]等。這些模型使用有限數(shù)量的變量近似模擬連續(xù)型機(jī)器人的形狀,以降低形狀的維數(shù)。另外,GRAVAGNE等[57-59]為受平面內(nèi)載荷的平面連續(xù)機(jī)器人的靜力學(xué)和動(dòng)力學(xué)提供了一個(gè)基于能量的綜合模型。Cosserat桿理論顯示出具有作為描述連續(xù)體機(jī)器人變形的通用工具的潛力,已用于預(yù)測(cè)肌腱驅(qū)動(dòng)的連續(xù)機(jī)器人[60]和預(yù)彎曲的同心管[61]中心骨干的形狀。本文不僅考慮連續(xù)型機(jī)器人與繩索連接點(diǎn)處力矩,還考慮連接點(diǎn)力和繩索沿骨干長(zhǎng)度對(duì)其施加的分布力和分布力矩,以及外部負(fù)載和外部力矩,對(duì)仿生魚骨連續(xù)型機(jī)器人進(jìn)行靜力學(xué)分析。建立仿生魚骨連續(xù)型機(jī)器人運(yùn)動(dòng)模塊的Cosserat-rod模型與驅(qū)動(dòng)繩索的Cosserat-string模型,將兩種模型進(jìn)行耦合,考慮剛性魚骨片、柔性彈性片以及軟繩索之間的耦合作用,得到運(yùn)動(dòng)模塊受到不同繩索驅(qū)動(dòng)力和不同外部載荷時(shí)的變形。
1 仿生魚骨單元的Cosserat-rod模型
為了描述仿生魚骨連續(xù)型機(jī)器人在三維空間的變形,首先基于Cosserat理論建立仿生魚骨單元的運(yùn)動(dòng)學(xué)以及靜力學(xué)模型,然后用本構(gòu)方程將運(yùn)動(dòng)學(xué)變量與力學(xué)參數(shù)相關(guān)聯(lián),進(jìn)而可得到仿生魚骨單元在不同驅(qū)動(dòng)力和不同尖端載荷下的彎曲變形。
1.1 仿生魚骨單元運(yùn)動(dòng)學(xué)模型
仿生魚骨單元由外側(cè)布置有十字形薄板的純軟套內(nèi)嵌彈性片組成[52]。為了描述仿生魚骨單元的的Cosserat-rod模型,把仿生魚骨單元看作是均勻的片狀結(jié)構(gòu),如圖1所示,其上任意一點(diǎn)的位置可表示為
p(s)=x(s)e1+y(s)e2+z(s)e3
(1)
定位的材料點(diǎn)s其方向由系在其上的正交單位向量d2和d3共同給出。d1=d2d3垂直于橫截面,但由于剪切變形的影響d1不一定平行于中心曲線的切線。
引入旋轉(zhuǎn)矩陣R(s)∈SO(3),則仿生魚骨單元的位姿可以描述為
(2)
以仿生魚骨單元無限小的微元部段為研究對(duì)象,本地坐標(biāo)平移變化和方位變化描述為
(3)
(4)

全局坐標(biāo)下速度向量和角速度向量為
v(s)=R(s)v(l)(s)
(5)
u(s)=R(s)u(l)(s)
(6)
由速度和位移關(guān)系可得
(7)
(8)
由于角速度可引起方位的改變,可得
(9)
(10)
其中
且定義仿生魚骨單元變形前的位姿為g*(s),相關(guān)運(yùn)動(dòng)學(xué)參數(shù)為R*(s)、v*(s)、u*(s)、v(l)*(s)和u(l)*(s)。
1.2 仿生魚骨單元靜力學(xué)模型
選取仿生魚骨單元點(diǎn)c與點(diǎn)s之間的σ段進(jìn)行分析,受力示意圖如圖2所示。n(s)表示仿生魚骨單元的遠(yuǎn)端部段(從點(diǎn)s到其尾端)對(duì)σ段的力,n(c)表示仿生魚骨單元的近端部段對(duì)σ段的力(從初始端到點(diǎn)c)。同理,存在力矩m(s)和m(c)。f(σ)和l(σ)表示作用在點(diǎn)集σ上的分布力和分布力矩。則力/力矩平衡方程為
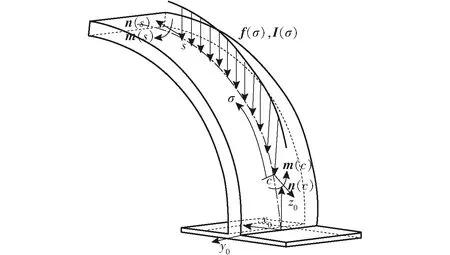
圖2 仿生魚骨單元的受力示意圖Fig.2 Force diagram of bioinspired fishbone unit

(11)
(12)
式(11)、(12)兩邊對(duì)s求導(dǎo)得
(13)
(14)
1.3 運(yùn)動(dòng)學(xué)變量與力學(xué)參數(shù)映射規(guī)律

n(s)=R(s)Kse(s)(v(l)(s)-v(l)(s))
(15)
m(s)=R(s)Kbt(s)(u(l)(s)-u(l)*(s))
(16)
其中
Kse(s)=diag(ke1,ks1,ks2)
Kbt=diag(kt1kb1kb2)ke1=EAT
ks1=ks2=GATkt1=GJ
kb1=EI1kb2=EI2
式中Kse——剪切和拉伸剛度矩陣
Kbt——彎曲和扭轉(zhuǎn)剛度矩陣
1.4 等式構(gòu)建與變換
將式(15)代入式(13)得
?s(R(s)Kse(s)(v(l)(s)-v(l)(s)))+f(s)=0
(17)
通過求解得
(18)
將式(8)、(15)、(16)代入式(14)得
?s(RKbt(u(l)-u(l)*))+
Rv(l)×RKse(v(l)-v(l)*)+I=0
(19)
通過求解得

(20)
2 驅(qū)動(dòng)繩索Cosserat-string模型
驅(qū)動(dòng)繩索Cosserat-string模型的建立基于以下兩個(gè)假設(shè):假設(shè)繩索與機(jī)器人上的繩索導(dǎo)向孔之間為無摩擦接觸。假設(shè)繩索位于繩索導(dǎo)向孔中間位置并保持不變。
作用在仿生魚骨單元上的分布力f和分布力矩l可分為由真正的外部載荷引起的分布力fa和分布力矩la以及由繩索約束所引起的分布力fb和分布力矩lb,則
f=fa+fb
(21)
l=la+lb
(22)
為了推導(dǎo)fb和lb,首先建立驅(qū)動(dòng)繩索的運(yùn)動(dòng)學(xué)模型。
2.1 驅(qū)動(dòng)繩索運(yùn)動(dòng)學(xué)模型
如圖3所示,繩索穿過仿生魚骨單元的十字形薄板上的導(dǎo)線孔,沿著機(jī)器人長(zhǎng)度方向布置。通過描述導(dǎo)線孔的位置即可定義繩索的路徑。可知第i個(gè)驅(qū)動(dòng)繩的導(dǎo)向孔在局部坐標(biāo)系下位置可表示為
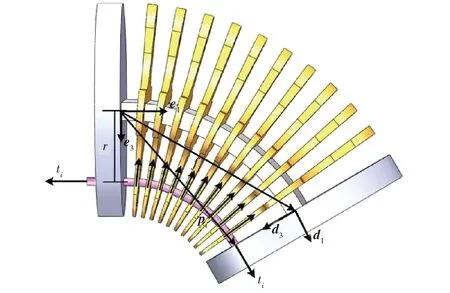
圖3 仿生魚骨單元驅(qū)動(dòng)繩的受力示意圖Fig.3 Force diagram of driving cable of bioinspired fishbone unit
(23)
進(jìn)一步,可得到仿生魚骨單元未變形時(shí),第i個(gè)驅(qū)動(dòng)繩的導(dǎo)向孔在全局坐標(biāo)系下的位置為
(24)
則仿生魚骨單元在驅(qū)動(dòng)繩索的作用下產(chǎn)生變形時(shí),第i個(gè)驅(qū)動(dòng)繩的導(dǎo)向孔在全局坐標(biāo)系下的位置為
pi=Rri+p
(25)
2.2 驅(qū)動(dòng)繩索靜力學(xué)模型
參考式(13),可得驅(qū)動(dòng)繩索的內(nèi)力導(dǎo)數(shù)公式為
(26)
式中fi(s)——魚骨單元在第i個(gè)繩索上的分布力
ni(s)——驅(qū)動(dòng)繩索內(nèi)力
O——零矩陣
繩索只能承受張力,用ti(s)來表示,其內(nèi)力方向始終平行于繩子曲線pi(s)處的切線,則得
(27)
其中由于模型建立基于無摩擦接觸假設(shè),ti(s)在沿繩方向上大小不變。
將式(27)代入式(26),整理可得作用在繩索上的分布力為
(28)
3 仿生魚骨單元與驅(qū)動(dòng)繩索耦合模型
3.1 耦合模型隱式表達(dá)
根據(jù)推導(dǎo)的繩索上的分布力,可得驅(qū)動(dòng)繩索作用在仿生魚骨單元上的分布力fb和分布力矩Ib。首先根據(jù)式(28),可得
(29)
驅(qū)動(dòng)繩索作用在仿生魚骨單元主干形心處的分布力矩是每個(gè)力臂與每個(gè)分布力的交叉乘積之和。因此
(30)
如圖3所示,在本樣機(jī)中,仿生魚骨單元的主干與繩索同步彎曲,pi-p與fi的方向平行,所以Ib=0。
將式(28)代入式(29)可得
(31)
為了用運(yùn)動(dòng)單元的運(yùn)動(dòng)學(xué)變量v(l)、u(l)、R和p來表示分布力fb和分布力矩Ib,將式(28)兩邊對(duì)s進(jìn)行求導(dǎo)得到
(32)
(33)
將式(32)、(33)代入式(31),然后將結(jié)果經(jīng)過式(21)代入式(18),并將Ib=0經(jīng)式(22)代入式(20),即可得一組隱式微分方程來表示仿生魚骨單元與驅(qū)動(dòng)繩索的耦合模型。
3.2 耦合模型顯式表達(dá)
為了得到仿生魚骨單元與驅(qū)動(dòng)繩索的耦合模型的顯式表達(dá),將式(32)、(33)寫成局部坐標(biāo)下的形式,則得到
(34)
(35)
根據(jù)式(31)fb可以表示為
(36)
其中
將式(36)和Ib=0代入式(18)、(20),并對(duì)其進(jìn)行整理得到
(37)
(38)

(39)

(40)
進(jìn)而仿生魚骨單元與驅(qū)動(dòng)繩索的耦合模型的顯式表達(dá)為
(41)
4 運(yùn)動(dòng)模塊靜力學(xué)分析
運(yùn)動(dòng)模塊由兩級(jí)仿生魚骨單元垂直交叉串聯(lián)而成,在布置時(shí)第一級(jí)仿生魚骨單元執(zhí)行左右彎曲以減少由其重量引起的自身結(jié)構(gòu)的變形,對(duì)兩級(jí)仿生魚骨單元進(jìn)行分步分析。
4.1 第1級(jí)仿生魚骨單元靜力學(xué)分析
首先對(duì)第1級(jí)仿生魚骨單元進(jìn)行分析。全局坐標(biāo)系和局部坐標(biāo)系的建立如圖4所示。基于以上對(duì)仿生魚骨單元的分析,很容易得到

圖4 運(yùn)動(dòng)模塊的空間位姿描述Fig.4 Spatial position and posture of motion module
p1(s)=x1(s)e1+y1(s)e2+z1(s)e3
(42)
(43)
(44)
(45)

第1級(jí)彎曲單元尖端的位置O2為
O2=T1(S1)D1
(46)
其中
式中d1——第1級(jí)彎曲單元尖端連接件厚度
如圖4所示,第1級(jí)仿生魚骨單元靜力學(xué)分析的邊界條件為
(47)
(48)
n1(S1)=N1(S1)
(49)
m1(S1)=M1(S1)
(50)
N1(S1)為第1級(jí)仿生魚骨單元尖端所受的力,包括兩項(xiàng):一項(xiàng)是其末端所受的繩索的拉力,記為F1;另1項(xiàng)為其尖端連接件與第2級(jí)仿生魚骨單元以及其尖端負(fù)載的重力和,記為G1。M1(S1)為第1級(jí)仿生魚骨單元的末端所受力矩。
4.2 第2級(jí)仿生魚骨單元靜力學(xué)分析
對(duì)運(yùn)動(dòng)模塊的第2級(jí)仿生魚骨單元進(jìn)行分析,可得
p2(s)=x3(s)e1+y3(s)e2+z3(s)e3
(51)
(52)
(53)
(54)
其中

式中t2i——第2級(jí)魚骨單元尖端所受繩子拉力
S2——第2級(jí)魚骨單元彎曲部分的長(zhǎng)度
運(yùn)動(dòng)模塊尖端位置為
O4=T2(S2)D2
(55)
其中
式中d2——第2級(jí)彎曲單元尖端連接件厚度
如圖4所示,第2級(jí)仿生魚骨單元靜力學(xué)分析的邊界條件為
(56)
R2(0)=R1(S1)
(57)
n2(S2)=N2(S2)
(58)
m2(S2)=M2(S2)
(59)
式中N2(S2)——第2級(jí)仿生魚骨單元尖端所受的力,包括兩項(xiàng),一項(xiàng)是其末端所受的繩索拉力,記為F2;另一項(xiàng)為其尖端連接件與第2級(jí)仿生魚骨單元重力和,記為G2
M2(S2)——第2級(jí)魚骨單元末端所受力矩
5 連續(xù)體機(jī)器人靜力學(xué)模型實(shí)驗(yàn)驗(yàn)證
如圖5a所示,仿生魚骨單元外側(cè)為布置有十字形薄板的純軟套,內(nèi)側(cè)嵌有柔性彈性片。內(nèi)嵌彈性片的材料為65Mn,彈性模量E=210 GPa,泊松比ν=0.3,剪切模量G=E/(1+ν),魚骨單元彎曲部分的長(zhǎng)度S1=S2=50 mm,寬b和厚度h分別為 23 mm 和0.3 mm。橫截面AT=bh=6.9 mm2,截面二次軸矩I11=304.175 mm4,I12=0.051 75 mm4,極慣性矩J1=304.226 75 mm4,截面二次軸矩I21=0.051 75 mm4,I22=304.175 mm4,極慣性矩J2=304.226 75 mm4。
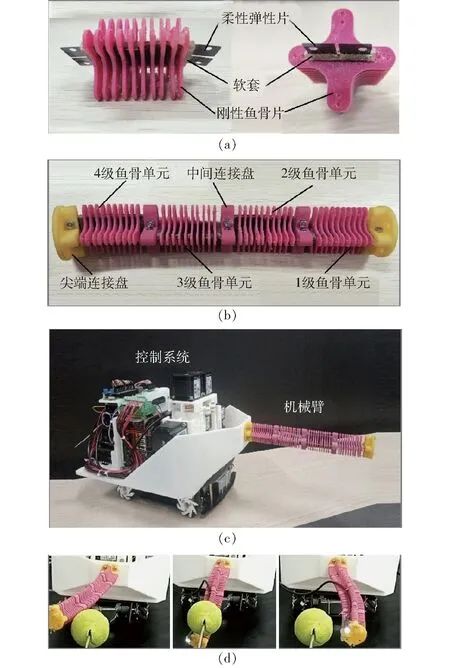
圖5 仿生魚骨連續(xù)型機(jī)器人樣機(jī)以及操作實(shí)驗(yàn)Fig.5 Prototype and operation experiment of bioinspired fishbone continuum robot
實(shí)驗(yàn)過程中,將仿生魚骨單元水平放置,依次在其尖端掛50、150、250、350、450、550 g砝碼,其尖端連接件質(zhì)量為15.46 g,通過兩組裝有激光定位器的可移動(dòng)電子尺模塊來記錄其彎曲形狀,如圖6所示。與理論模型所得到的彎曲形狀進(jìn)行比較,如圖7所示。實(shí)驗(yàn)數(shù)據(jù)沿著整個(gè)機(jī)器人長(zhǎng)度接近模型預(yù)測(cè),并且誤差沿著機(jī)器人長(zhǎng)度逐漸增加,因此機(jī)器人尖端誤差可以用來衡量模型精確度。計(jì)算式為
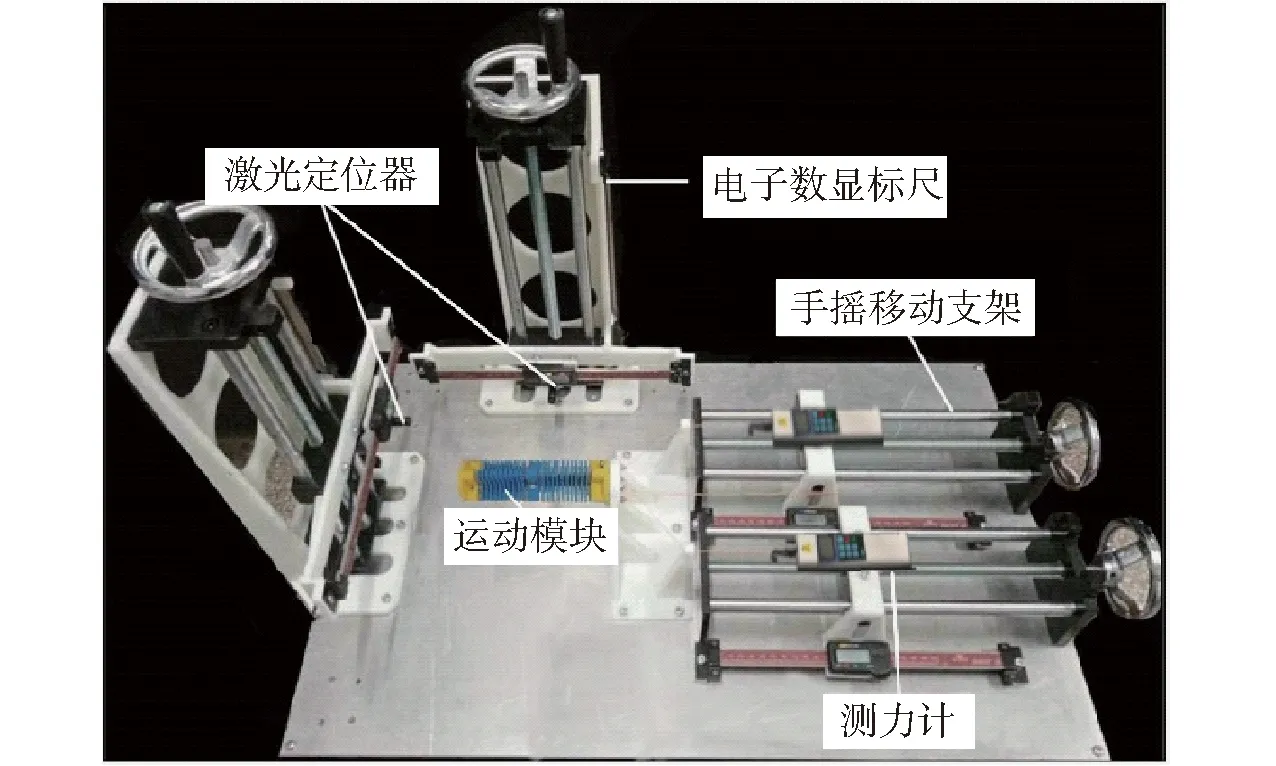
圖6 運(yùn)動(dòng)模塊的測(cè)量裝置Fig.6 Measuring device of motion module
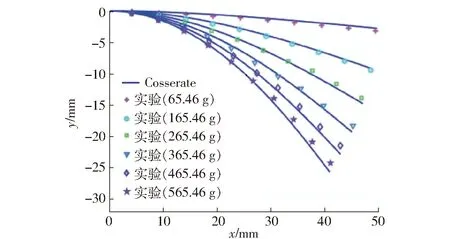
圖7 一節(jié)仿生魚骨單元彎曲曲線實(shí)驗(yàn)值與理論值對(duì)比Fig.7 Experimental and theoretical comparison of bending curves of bioinspired fishbone unit
(60)
式中pt1(s)——第1節(jié)仿生魚骨單元彎曲曲線s處的理論位置坐標(biāo)
pe1(s)——第1節(jié)仿生魚骨單元彎曲曲線s處的實(shí)驗(yàn)位置坐標(biāo)
通過長(zhǎng)度方向的誤差對(duì)比可得,隨著仿生魚骨單元尖端的負(fù)載增加,理論模型結(jié)果的誤差也隨之增加,最大誤差為1.07 mm。可得單節(jié)仿生魚骨單元的形狀模型精度較高,在尖端負(fù)載為565.46 g時(shí),誤差為仿生魚骨單元總長(zhǎng)度的2.13%。
在實(shí)驗(yàn)過程中,在對(duì)第1級(jí)仿生魚骨單元一側(cè)驅(qū)動(dòng)繩索依次施加5、10 N的拉力情況下,對(duì)第2級(jí)仿生魚骨單元的一側(cè)驅(qū)動(dòng)繩索依次施加3、6、9 N 的拉力,其尖端連接盤的質(zhì)量為15.46 g,然后用如圖6所示的裝置來記錄運(yùn)動(dòng)模塊的彎曲曲線,并與理論模型結(jié)果進(jìn)行對(duì)比,如圖8所示。可以看出,運(yùn)動(dòng)模塊的變形曲線理論與實(shí)驗(yàn)結(jié)果一致性也很高。隨著驅(qū)動(dòng)繩索的驅(qū)動(dòng)力的增加,理論值誤差也隨之增加。第2級(jí)仿生魚骨單元的預(yù)測(cè)變形誤差需大于第1級(jí)仿生魚骨單元的預(yù)測(cè)變形誤差。原因是由于在第2級(jí)仿生魚骨單元的變形分析中,起始坐標(biāo)為第1級(jí)仿生魚骨單元的尖端預(yù)測(cè)坐標(biāo),與實(shí)際位置坐標(biāo)存在著誤差,故導(dǎo)致第2級(jí)仿生魚骨單元的預(yù)測(cè)變形誤差增加。最大誤差為1.5 mm,為運(yùn)動(dòng)模塊總長(zhǎng)度的1.2%。
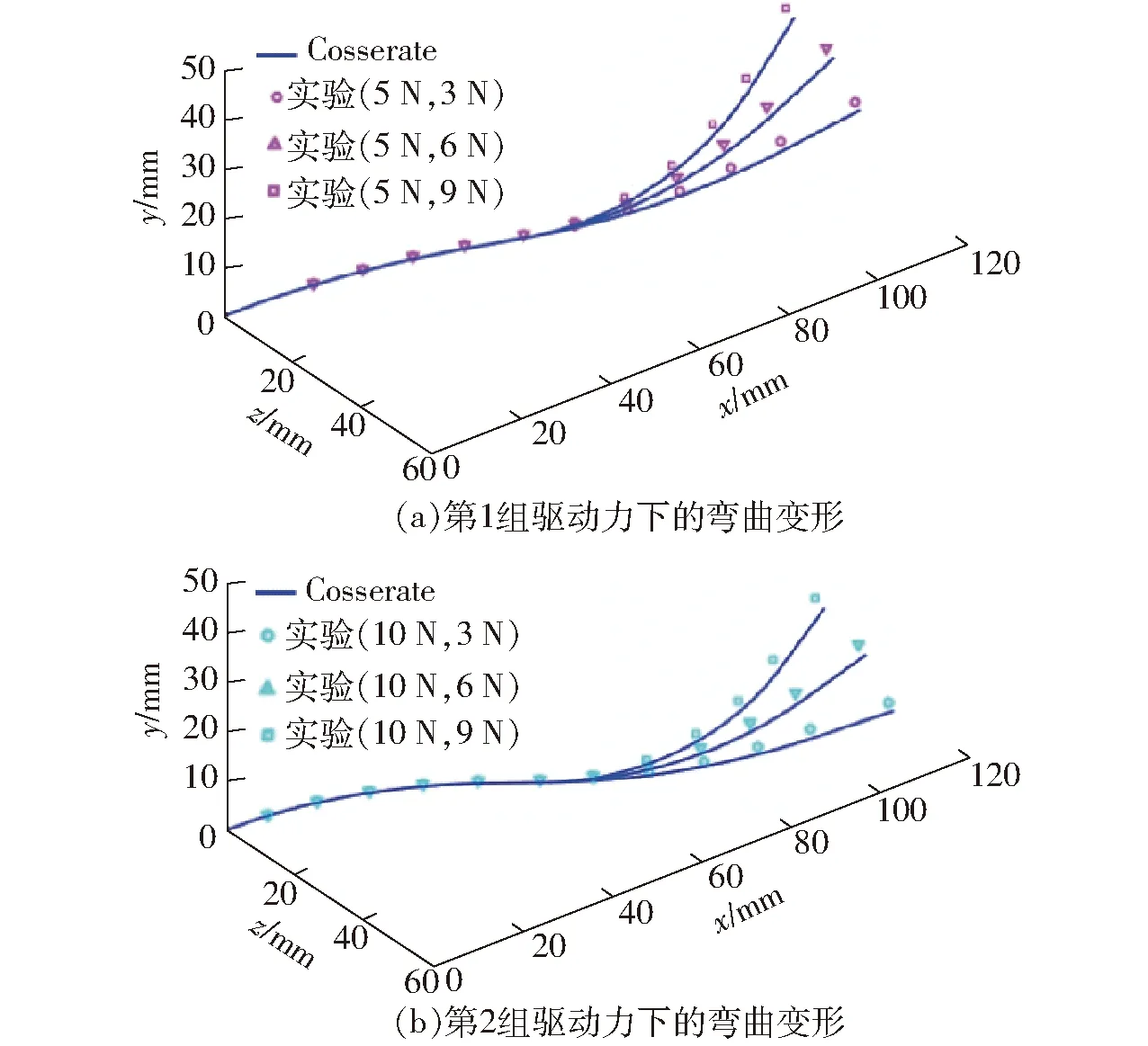
圖8 運(yùn)動(dòng)模塊的彎曲曲線實(shí)驗(yàn)值與理論值對(duì)比Fig.8 Experimental and theoretical comparison of bending curves of motion module
如圖5b、5c所示,仿生魚骨連續(xù)型機(jī)器人由控制系統(tǒng)與機(jī)械臂組成,而機(jī)械臂由2個(gè)運(yùn)動(dòng)模塊垂直交叉串聯(lián)而成。將機(jī)器人安裝于移動(dòng)小車上可擴(kuò)大其運(yùn)動(dòng)空間。該機(jī)器人具有良好的靈活性,如 圖5d 所示,其可以靈活地完成繞球運(yùn)動(dòng)。
6 結(jié)束語
基于Cosserat理論對(duì)剛?cè)彳涶詈辖Y(jié)構(gòu)的仿生魚骨連續(xù)型機(jī)器人進(jìn)行了靜力學(xué)建模。所建立的理論模型考慮了連續(xù)型機(jī)器人的剛性魚骨片、柔性彈性片、與軟繩索之間的耦合作用和自身重力,得到了機(jī)器人在繩索的拉力,繩索對(duì)仿生魚骨單元骨干作用的分布力和分布力矩,以及外部負(fù)載和力矩作用下的變形。并且實(shí)驗(yàn)驗(yàn)證了所建立模型的準(zhǔn)確性。模型誤差隨著魚骨單元變形變大而增加,隨著仿生魚骨單元的節(jié)數(shù)的增加,模型的預(yù)測(cè)誤差也隨之增加。兩節(jié)垂直交叉布置的魚骨單元串聯(lián)而成的運(yùn)動(dòng)模塊的尖端坐標(biāo)的預(yù)測(cè)誤差,最大為1.5 mm,為運(yùn)動(dòng)模塊總長(zhǎng)度的1.2%。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
 農(nóng)業(yè)機(jī)械學(xué)報(bào)2023年10期
農(nóng)業(yè)機(jī)械學(xué)報(bào)2023年10期
- 農(nóng)業(yè)機(jī)械學(xué)報(bào)的其它文章
- 高壓靜電場(chǎng)下發(fā)酵牛肉風(fēng)味品質(zhì)及微生物群落特性研究
- 氮肥減施對(duì)節(jié)水灌溉稻田NH3與N2O排放及氮肥利用的影響
- 基于BOA-SVM模型的區(qū)域洪水災(zāi)害風(fēng)險(xiǎn)評(píng)估與驅(qū)動(dòng)機(jī)制
- 基于SNSS-YOLO v7的肉牛行為識(shí)別方法
- 基于改進(jìn)YOLO v7的農(nóng)田復(fù)雜環(huán)境下害蟲識(shí)別算法研究
- 基于改進(jìn)YOLO v7的輕量化櫻桃番茄成熟度檢測(cè)方法