基于數據驅動和神經網絡的船舶機械軸承故障預測
2023-11-24 09:27:44姚遠
艦船科學技術 2023年18期
姚 遠
(武昌工學院,湖北 武漢 430000)
0 引 言
軸承是安裝在船舶上的承受載荷和轉動力的機械裝置。軸承具有承載能力強、摩擦系數低、耐磨性好等特點,能夠保證船舶在航行過程中的穩定性和安全性。軸承的選用要考慮到船舶的使用環境和工作條件,如船舶的航行速度、載荷大小、工作溫度等因素。此外,軸承的維護保養也非常重要,定期檢查和更換軸承,保證其正常運轉,延長其使用壽命。
船舶機械軸承的故障監測技術是近年來的研究熱點,目前常用的船舶軸承故障監測手段包括振動監測、溫度監測、聲音監測和油液監測。
振動監測:通過安裝振動傳感器在軸承上監測振動信號,通過分析振動頻譜和振動特征參數,可以判斷軸承的工作狀態和故障類型。
溫度監測:通過安裝溫度傳感器在軸承上監測軸承溫度變化,當溫度異常時可以判斷軸承是否存在故障。
聲音監測:通過安裝聲音傳感器在軸承上監測軸承工作時的聲音信號,通過分析聲音頻譜和聲音特征參數,可以判斷軸承的工作狀態和故障類型。
油液監測:通過監測軸承潤滑油的溫度、壓力、粘度等參數,可以判斷軸承的潤滑狀態和故障情況。
本文針對船舶機械軸承故障監測技術,提出基于小波變換和變分模態分解(VMD)的信號處理方法,結合小波神經網絡實現了船舶機械軸承故障的信號處理和預測。
1 船舶機械軸承特性及故障分析
為了對船舶軸承故障信號進行數學建模,針對船舶機械設備最常用的滾動軸承進行建模分析。
滾動軸承是固定轉軸和其他零部件相對位置的部件,通常由內圈、外圈、滾珠和保持架組成,如圖1所示。

圖1 滾動軸承的結構示意圖Fig.1 Structure diagram of rolling bearing
船舶滾動軸承常見的失效形式包括[1]:
1)疲勞失效
長期受到往復載荷作用,導致滾道和滾珠或滾子表面出現疲勞裂紋,最終導致斷裂。
2)磨損失效
由于滾道和滾珠或滾子之間的摩擦和磨損,導致滾道表面磨損、凹坑和滾珠或滾子表面磨損、變形。
3)過載失效
當滾動軸承承受超過其額定負荷的載荷時,會導致滾珠或滾子和滾道之間的接觸壓力過大,從而引起滾珠或滾子和滾道的塑性變形或斷裂。
4)溫度過高失效
由于滾動軸承在工作過程中摩擦產生熱量,如果無法及時散熱,會導致溫度升高,從而引起潤滑劑失效、材料膨脹、變形等問題。
軸承發生故障的位置以內圈、外圈和滾動體為主。
1)滾動軸承的內圈故障
當軸承內圈發生故障時,不正常的轉動會導致振動沖擊,產生徑向載荷,內圈故障的特征頻率計算式為:
式中:Z為滾動體的個數,r為滾動軸承轉速,d為滾動體的直徑,D為滾動軸承的節圓直徑, α為滾動體接觸角。
軸承故障頻率往往為高頻,通過濾波器進行低頻濾波,可以得到軸承故障頻譜,如圖2 所示。

圖2 軸承故障高通濾波和故障頻譜Fig.2 Bearing faults, high-pass filtering and fault spectrum
2)滾動體故障
滾動體故障是船舶軸承最為常見的一種故障,伴隨著軸承過溫、異響、振動沖擊等,滾動體故障的特征頻率計算式為:
3)外圈故障
由于滾動軸承外圈固定在軸承座上,因此,當外圈出現故障時,發生沖擊載荷的位置是固定的,信號特征頻率為:
2 基于數據驅動和神經網絡的機械軸承故障預測
2.1 變分模態分解算法VMD 的信號分析技術
變分模態分解(VMD) 是一種頻域的信號分析方法,與濾波算法和傅里葉變換等相結合,能夠實現信號的準確解析。VMD 是基于變分貝葉斯方法[2],它被用于將復雜的非平穩信號分解成一系列模態函數,通過最小化信號與模態函數之間的差異來實現信號分解。VMD 首先將信號分解成多個頻帶,每個頻帶包含一組頻率和幅度。然后,通過迭代優化的方式,確定每個頻帶的中心頻率和帶寬,以及每個頻帶中的模態函數。最后,將所有的模態函數求和,得到原始信號的近似重構。
VMD 的優點在于能夠處理非平穩信號,適用于各種信號分析和處理任務。它可以用于信號去噪、頻譜分析、模態分解等應用領域。VMD 還具有較好的自適應性,可以根據信號的特性自動選擇合適的參數。
對信號f(t)的變分模態分解過程如下:
1)假設信號有k個固有模態函數uk(t)的解。
2)建立固有模態函數uk(t)的希爾伯特變換,即
3)對信號進行頻譜調制,公式如下:
4)對調制的信號進行高斯變換:
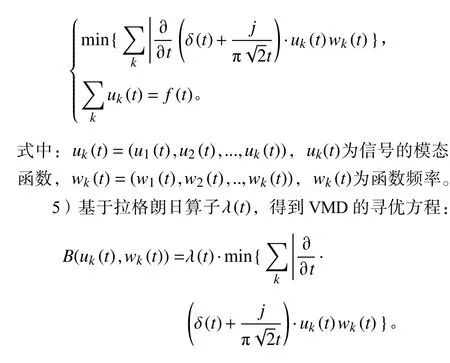
圖3 為基于VMD 算法的函數迭代示意圖。
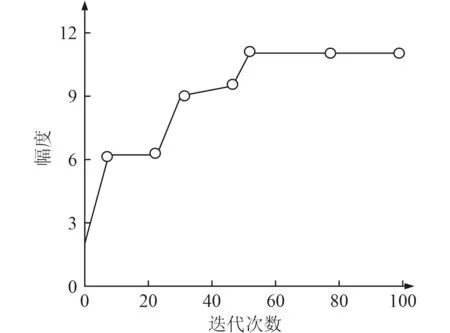
圖3 基于VMD 算法的函數迭代示意圖Fig.3 Function iteration diagram based on VMD algorithm
可知,基于VMD 模態分解在60 次的迭代次數附近,幅值不再發生變化,達到函數收斂,可見VMD模態分解算法的求解效率相對較高。
2.2 多分辨小波變換理論
多分辨小波變換分析基于小波函數的多尺度分析能力,可以將信號分解成不同尺度的頻帶[3],并在不同尺度上對信號進行分析。在信號分解步驟中,信號經過一系列低通和高通濾波器的處理,得到不同尺度的頻帶系數。低通濾波器用于提取低頻信息,高通濾波器用于提取高頻信息。在重構步驟中,通過逆濾波器和逆小波變換,將頻帶系數重構為原始信號。
對于某非線性信號x(t),定義其具有平方可積性,滿足:
式中:x(w)為小波函數,ω為頻率。
信號x(t)的平移與伸縮變換如下式:
式中:s為伸縮變換因子, α為平移變換因子。
信號的傅里葉變換為f(t),則小波變換為:

常見的小波函數有:
1)Harr 小波函數
Harr 小波函數的性質包括平移不變性、尺度不變性和正交性,這些性質使得Harr 小波函數在信號壓縮、圖像處理和數據壓縮等領域有著廣泛的應用。表達式如下:
2)Morlet 小波函數
Morlet 小波函數的形狀類似于一個復指數函數,同時具有高斯包絡。它的實部表示信號的振幅變化,虛部表示信號的相位變化。通過對信號進行Morlet 小波變換,可以得到信號在不同頻率上的振幅和相位信息,從而實現信號的時頻分析。模型如下:
2.3 基于神經網絡和VMD 的軸承故障預測技術
本文結合模糊神經網絡算法和VMD 算法,建立一種船舶軸承故障預測系統,該系統的原理如圖4 所示。
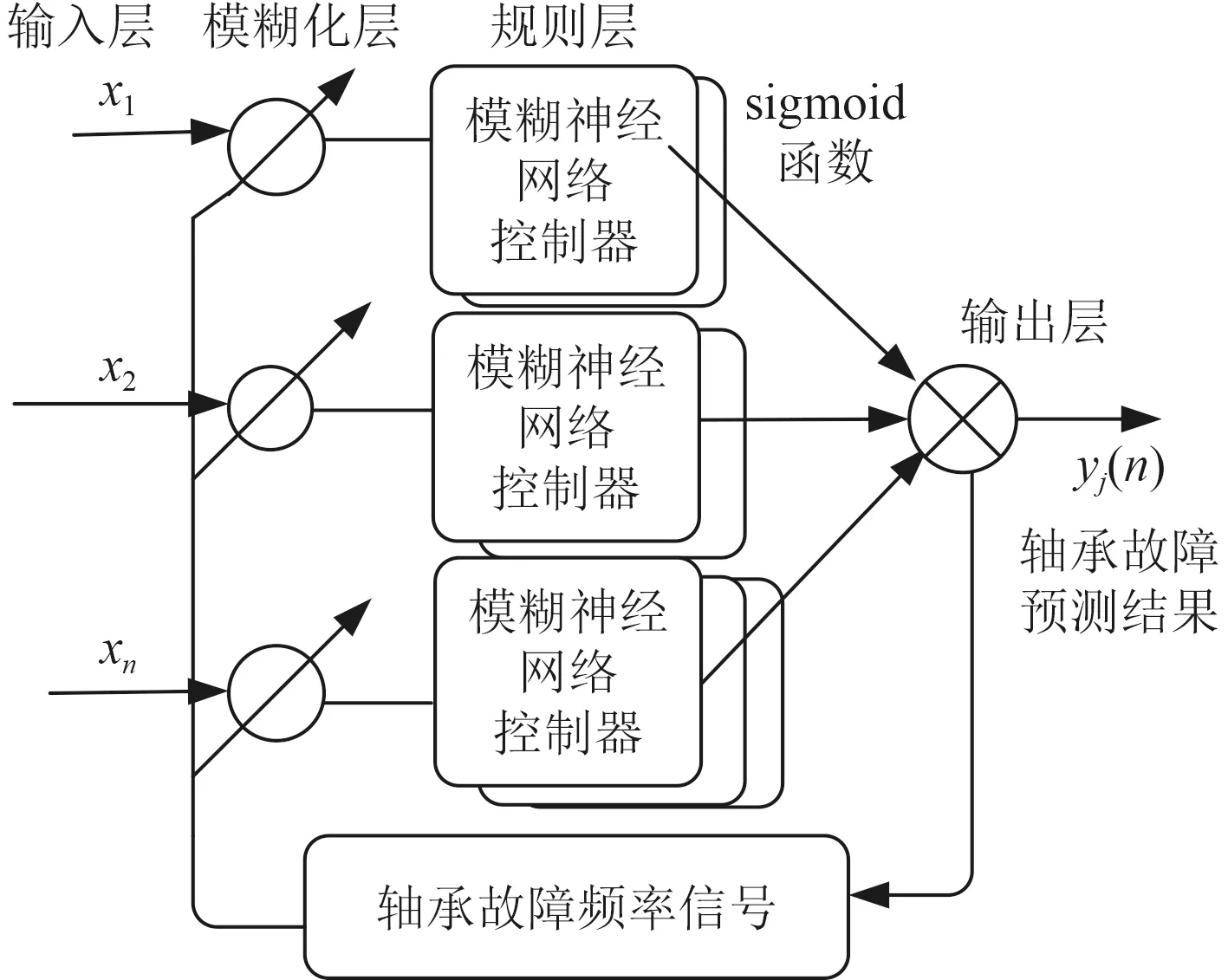
圖4 基于神經網絡和VMD 的軸承故障預測原理Fig.4 Bearing failure prediction principle based on neural network and VMD
基于模糊神經網絡和VMD 的軸承故障預測步驟如下:
步驟1 網絡的初始化。
步驟2 輸入信號的小波變換。
輸入信號為軸承振動信號x(t),信號的頻域函數x(ω)滿足前述條件:
步驟3 神經元的距離計算,如下式:
式中,wi(t)為神經網絡的函數權值。
步驟4 故障預測。
建立系統的故障預測模型為:
式中: ωj(n) 為節點權值,aj為模糊因子,bj為變換因子。
2.4 船舶軸承故障預測系統的測試
為了驗證本文提出的故障預測方法的有效性,搭建船舶軸承的故障預測測試平臺,如圖5 所示。
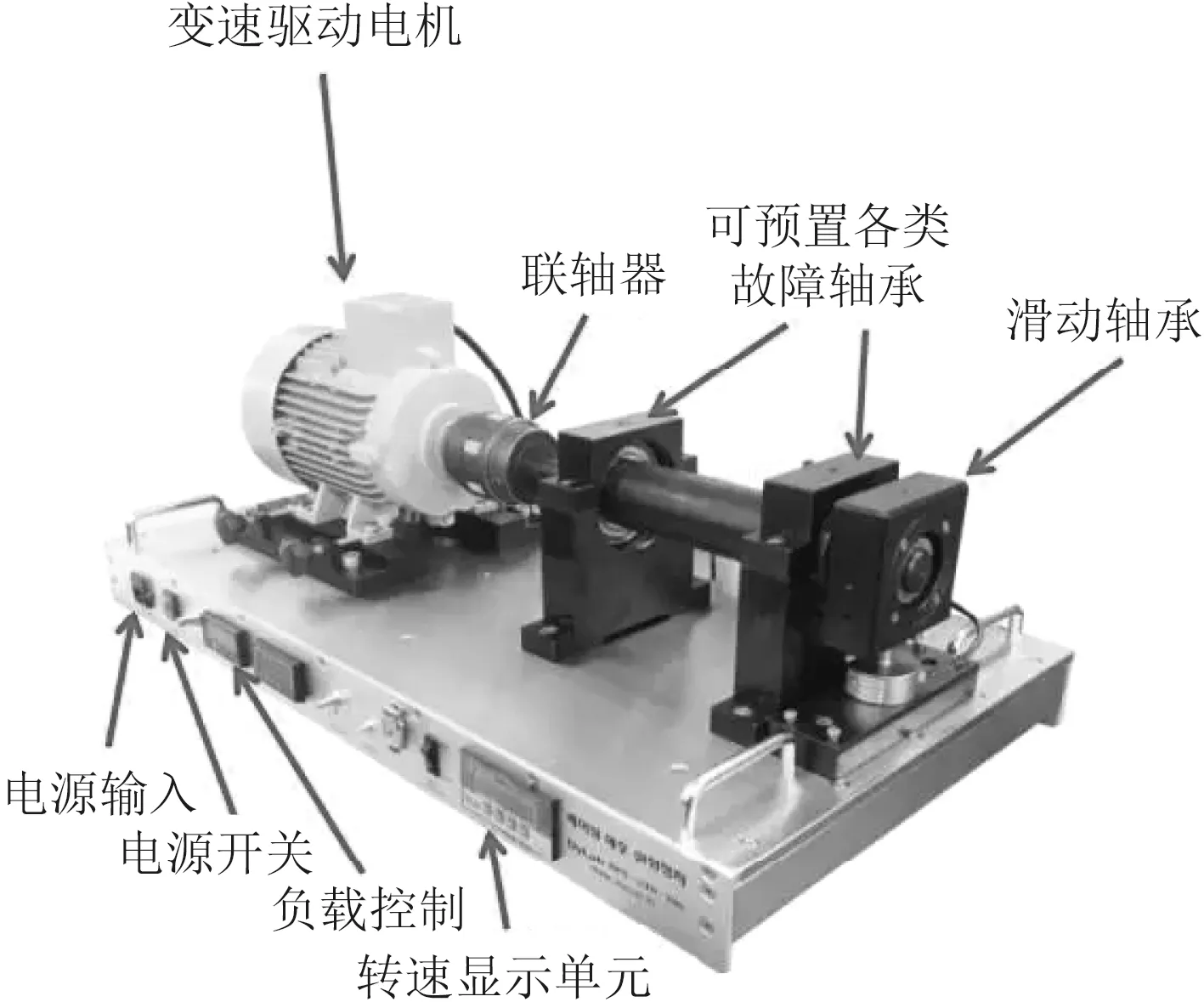
圖5 船舶軸承的故障預測測試平臺Fig.5 Failure prediction test platform for ship bearings
測試平臺包括電源輸入、聯軸器、滑動軸承、轉速顯示單元、負載控制、變速驅動電機[4]等。
設定電機轉速2 000 r/min,采樣頻率20 kHz,時間歷程1 200 s,得到軸承故障頻譜如圖6 所示。

圖6 軸承故障頻譜Fig.6 Spectrum of bearing failures
可知,在1 000 s 左右出現明顯的故障頻率,振動幅值明顯增加。
3 結 語
針對船舶軸承的運行可靠性,本文結合模糊神經網絡和VMD 模態分解算法,從軸承的故障頻率建模出發,建立了船舶軸承的故障預測和診斷系統,并通過試驗臺測試驗證了方法的有效性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39