結合GPS 的船舶試航系統數據通信技術
2023-11-24 09:27:44趙玉紅
艦船科學技術 2023年18期
趙玉紅
(1.河南科技大學,河南 洛陽 471000;2.河南科技職業大學,河南 周口 466000)
0 引 言
船舶在正式交付前都需要進行試航,在試航過程中可以獲取船舶航行的關鍵信息,包括船舶通信系統、電力系統、定位系統等,這些試航信息需要在收集之后和船舶的建造和操作要求進行對比,以確定船舶是否滿足航行要求。傳統的船舶試航信息記錄都是通過記錄儀來將船舶試航信息進行記錄和存儲,最后在船舶完成試航后再對數據進行對比,而在信息化發展的今天,通信技術和數據處理技術的不斷發展為船舶試航提供了新的助力。除了船舶的基本操作信息外,船舶試航還需要對船舶航行中的位置信息進行記錄和分析,GPS 技術是目前使用較為廣泛的衛星導航技術,在民用領域其定位精度可以達到3 m。
國內目前對船舶試航的主要研究方向集中在試航流程、試航數據的采集以及試航模型等方面,李珍璜等[1]針對當前試航流程中存在的問題提出優化措施,能夠有效縮短試航時間。吉永軍等[2]針對船舶試航過程中出現依賴人工專家的問題提出了一種技術知識網絡專家方案,通過貝葉斯網絡推理來解決試航中出現的問題,從而提升解決試航問題的效率。張海華等[3]以集裝箱船為例,對比建立的模型和船舶試航時的航行數據,發現模型數據對船舶試航具有一定參考性。
目前對船舶試航數據的實時性傳輸和存儲等研究較少,因而本文在對數據通信技術、GPS 衛星導航技術等進行充分研究的基礎上,提出一種能夠對船舶試航數據實現快速通信傳輸的方法,在系統中保留北斗導航數據接口,為后續試航系統的完善提供足夠的提升空間。
1 數據通信技術
1.1 船舶試航數據特點
為了測試建造的船舶是否達到出廠要求,需要對船舶航速以及航向操作進行測試,這些測試包括船舶回轉試驗、緊急剎車試驗、直線航行試驗以及錨泊試驗等,所有這些測試可以對船舶的方向舵操作、電氣設備的操作等基本功能進行確認。在船舶上設置有傳感器節點,通過對這些傳感器節點的基本數據進行收集和匯總,最后獲取所有船舶的試航數據。
船舶試航數據由于涉及到GPS 位置信息、船舶發動機、雷達數據、AIS 數據、各類電氣設備的狀態信息等,在整個試航過程中需要對這些數據進行全程監控,以確保船舶按照既定航向運動,同時確保船舶在既定試航過程中,所有設備的工作狀態正常[4]。綜合來看,船舶試航數據有如下特征:
1)數據種類多
船舶試航是對一艘全新的船舶進行測試,因而在試航過程中需要收集的數據種類非常多,而且不同種類數據的格式和大小有很大不同,因而針對不同數據的處理方法也不盡相同。
2)單次數據傳輸量小,但總量大
船舶試航數據的單次數據傳輸量比較小,這是由于很多數據都是屬于開關量數據和模擬量,這些數據量都小于1 kb,但是由于需要采集的數量比較多,因而船舶的試航數據量比較大。如果采用實時存儲,需要在試航的船舶上配置有一個容量較大的存儲器。本文提出的試航系統數據通信,通過4G 通信將船舶試航數據實時傳輸到控制中心,因而在船舶上只需要設置一個容量較小的存儲器作為數據中轉[5-6]。
3)數據異常處理要求高
船舶試航過程中容易受到環境干擾,同時也可能會產生一些異常數據,對這些異常數據需要及時進行判斷,通常在采集系統中在異常數據產生時,可以在短時間內再次對該數據進行采集,如果再次采集的數據正常,會使用新數據來代替異常數據,或者是短時間內連續采集幾次,使用多次采集的數據平均值來判斷是否存在異常[7]。
船舶試航數據除以上特點外,隨著船舶智能化、大型化的發展,船舶試航數據量會進一步加大,同時除了傳統的開關量、模擬量、GPS 位置信息等,在未來還有視頻數據、聲音數據等都需要進行采集,因而數據的傳輸量會越來越大。
1.2 GPS 技術
GPS 技術是目前使用最廣泛的船舶導航定位技術,GPS 偽隨機碼測距原理如圖1 所示。

圖1 GPS 偽隨機碼測距原理Fig.1 GPS pseudo-random code ranging principle
GPS 衛星信號中包含了測距碼、數據碼以及載波,在船舶試航中關注的是測距碼,測距碼又可以分為C/A 碼和P 碼,P 碼是一種偽測距碼,相較于C/A 碼而言,P 碼不容易被捕獲,但是精度高。在實際應用中一般使用偽隨機碼來獲取船舶位置。船舶上的接收機通過分析信號傳播的時間△t,然后再乘以光速c,即可得到船舶和衛星之間的距離,如果能夠同時接收到3 個衛星的信號并加以分析,就可以獲取船舶的三維坐標。
但是在實際測算過程中由于受到電離層的誤差、數據傳輸誤差等,建立的GPS 船舶位置測算模型需要綜合考慮這些誤差因素,定義P為船舶和某一顆GPS衛星之間的偽距,則建立的船舶位置測算模型為:
式中:(X,Y,Z)為船舶的三維坐標,(X1,Y1,Z1)為GPS 的三維坐標,c為光速,△ts為衛星的鐘差,△tr為接收機的鐘差,Vtrop為對流層修正參數,Vion為電離層修正參數。同理可以獲取其他2 個衛星和船舶之間的偽距測算模型,最終即可算出接收機的鐘差和船舶坐標。
1.3 4G 通信技術
船舶試航數據需要依托4G 通信技術傳輸到岸基控制中心。4G 通信技術能夠實現20 Mbps 的上傳速度以及100 Mbps 的下載速度。4G 通信技術中采用了正交頻復用OFDM 技術和多入多出天線MIMO 技術,有效提升了數據傳輸效率和抗干擾性能。
1)OFDM 技術
采用正交子信道,同時在不同的正交子信道上分配傳輸的數據,不同正交子信道頻譜有重復部分,提升了頻段的利用效率,也減少了不同子信道之間的干擾,節約了帶寬。OFDM 技術和FDM 技術的對比效果如圖2 所示,可以發現,FDM 技術主要是采用獨立的頻段傳輸,相比較而言,4G 技術采用的OFDM 技術在數據傳輸速率上具有較大優勢,適用于當前船舶試航時需要傳輸大量數據的基本要求。
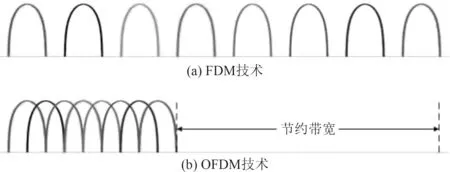
圖2 OFDM 技術和FDM 技術對比Fig.2 Comparison of OFDM technology and FDM technology
2)MIMO 技術
船舶試航數據傳輸需要極高的可靠性,否則就無法保證船舶試航的順利完成。MIMO 技術是4G 技術的關鍵技術之一,其基本原理如圖3 所示。從發送端到接收端有多個天線,改變了原來的單一天線發送和接收數據由于存在干擾而導致傳輸失敗的情況,提升了數據提升的可靠性。
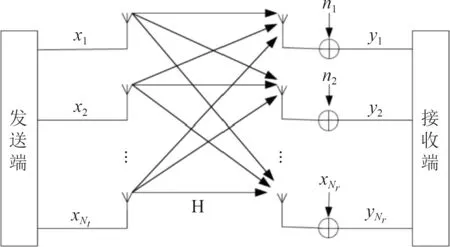
圖3 MIMO 技術Fig.3 MIMO technology
2 船舶試航數據通信系統的實現
2.1 系統基本架構
船舶試航數據通信系統的設計目標是為了將試航數據通過4G 無線通信技術傳輸到岸基控制中心,系統包括試航數據采集模塊、GPS 信息處理模塊、4G 數據傳輸、數據接收模塊、數據存儲模塊、數據分析和數據顯示模塊等,其架構如圖4 所示。

圖4 船舶試航數據通信系統架構Fig.4 Architecture of ship trial data communication system
1)試航數據采集模塊:試航數據采集包括各類傳感器、開關量采集的試航數據;
2)GPS 信息處理模塊:將獲取的GPS 衛星導航信息進行解碼和計算,使用偽碼測距技術獲取當前船舶的位置和對應的時間;
3)嵌入式處理器:采用ARM 嵌入式處理器,將試航數據采集模塊和GPS 信息處理模塊獲取的試航數據基本信息進行存儲,并按照規定好的協議通過4G 無線網絡發送出去;
4)數據接收模塊:岸基試航控制中心使用4G 網絡接收試航的所有數據;
5)數據存儲:將接收到的數據存儲到數據庫中;
6)數據分析:將接收的試航數據信息進行分類,并建立試航分類比對測試,對所有開展的試航項目時段內的數據進行比對,將獲取的數據值和標準值進行比對,對不符合要求的項目列表并輸出到文件;
7)數據顯示:對船舶試航過程中的基礎數據通過圖、表的形式顯示,實現船舶試航過程的快速交互。
2.2 系統實現
岸基試航控制中心通過無線4G 網絡獲取試航數據信息,并將其存儲、分析并顯示。圖5 為船舶試航數據通信系統的軟件界面,在主頁面上顯示當前4G 通信的狀態,以確保能夠正常和船舶進行數據通信。
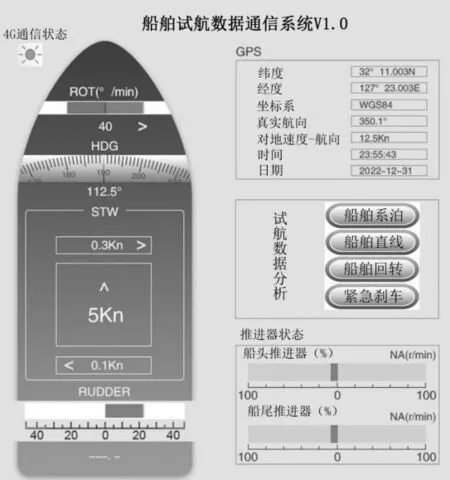
圖5 軟件界面Fig.5 Software interface
主頁面主要包括GPS 模塊、試航數據分析模塊以及推進器狀態模塊。GPS 模塊是對GPS 獲取的船舶坐標進行顯示,并標明當前使用的坐標系為WGS84 坐標系,顯示當前的船舶航向。試航數據分析可以通過點擊按鈕獲取不同船舶試航實驗的基本數據,推進器狀態是對船頭和船尾的推進器狀態進行推測,保證試航過程的安全。
2.3 系統測試
在完成系統既定功能之后,對船舶試航數據通信系統進行數據傳輸測試。使用單點對單點的測試方案,在實驗中選取距離1 km 的2 棟大樓,其中在一棟大樓中放置一塊ARM 嵌入式開發板,開發板連接路由器,另外一棟大樓中布置有一臺電腦,電腦上裝有船舶試航系統軟件。測試指標包括系統通信時延、4G 連接成功率、掉線率以及最大傳輸速率等。具體測試流程如下:
1)編寫測試程序,在按下測試按鈕后嵌入式開發板會通過4G 網絡向外發送數據;
2)在電腦軟件端接收數據,并使用相關的工具對相關的通信指標進行測試,收集測試結果。
測試結果如表1 所示。其中,4G 連接成功率是指系統軟件端每次發起4G 連接的成功率,掉線率為系統軟件無法保持4G 連接狀態的概率,最大傳輸速率是指從嵌入式開發板到系統軟件的最大傳輸速度。可以發現系統的時延在可接受范圍內,同時4G 網絡的連接成功率也非常高,掉線率低,最大傳輸速率可以達到10.0 Mbps,在軟件中可以通過設置網絡自動重連來保證系統的穩定工作。

表1 系統通信測試結果Tab.1 test results of system communication
3 結 語
船舶試航是船舶制造過程中的重要步驟之一,為了保證船舶試航數據的穩定和可靠,并提升船舶試航測試的效率,本文結合GPS 技術和4G 網絡技術,提出一種船舶試航數據通信系統,得出的結論如下:
1)使用4G 無線網絡實現船舶試航數據的收集、傳輸、存儲以及分析,可以有效提升船舶試航效率;
2)GPS 技術中通過偽隨機碼的位置測算模型可以有效獲取船舶的位置信息,船舶位置信息和其他試航數據有效結合,就可以完成船舶試航的多種實驗項目;
3)4G 無線通信技術具有較高的通信速率,系統時延低,因而可以滿足船舶試航數據通信系統對于數據傳輸的基本要求。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00