遙感圖像在船舶檢測深層卷積神經(jīng)網(wǎng)絡的應用
2023-11-24 09:27:50李泳強石小平
艦船科學技術 2023年18期
李泳強,石小平
(新疆大學 數(shù)學與系統(tǒng)科學學院,新疆 烏魯木齊 830046)
0 引 言
海面環(huán)境多變且條件惡劣,給船舶目標檢測帶來極大難度[1-2]。利用合成孔徑雷達圖像實現(xiàn)船舶目標的識別是過去普遍采用的船舶檢測方式[3],與之相比,遙感圖像具有覆蓋區(qū)域廣、視覺信息豐富等優(yōu)勢,因此,基于遙感圖像的船舶目標檢測已成為當下研究熱點[4]。
李森森等[5]針對船舶遙感圖像采集質量差造成的船舶目標識別精度不高的問題,提出在船舶遙感圖像增強的基礎上,以船舶方向梯度直方圖作為判別依據(jù),實現(xiàn)候選區(qū)域船舶目標與其他干擾信息的區(qū)分。該方法因無法實現(xiàn)干擾因素的全部消除,導致船舶檢測效果大受影響。深度卷積神經(jīng)網(wǎng)絡能夠根據(jù)輸入的遙感圖像實現(xiàn)目標特征圖的獲取,從而完成目標檢測與識別。鑒于上述方法在船舶目標檢測存在的問題,本文研究深層卷積神經(jīng)網(wǎng)絡的船舶遙感圖像檢測方法,實現(xiàn)不同類型船舶目標的精準檢測。
1 船舶遙感圖像目標檢測
1.1 船舶遙感圖像增強與去噪
為使船舶目標檢測精度滿足要求,通過拉普拉斯算子對其進行增強,提高視覺效果。f(x,y,z)描述船舶遙感圖像,其中任意一個像素點表示為(x,y),其維度表示為z。拉普拉斯算子公式為:
拉普拉斯算子可通過線性方式對其進行描述,對x、y方向作差分轉換,根據(jù)轉換結果以及式(1)即可實現(xiàn)拉普拉斯算子的準確描述:
通過式(2)可完成濾波模板的確定,將其與拉普拉斯算子聯(lián)合使用,即可完成拉普拉斯濾波的確定。
對船舶遙感圖像作增強處理后,仍可能存在部分噪聲干擾,采用中值濾波對其作進一步處理,提高船舶遙感圖像質量。
1.2 船舶遙感圖像目標檢測模型
本文構建的船舶遙感圖像目標檢測模型由引入多層可變形卷積層D-FPN 網(wǎng)絡以及D-FCN 網(wǎng)絡級聯(lián)而成,將處理后船舶遙感圖像作為船舶檢測模型的輸入后,利用引入多層可變形卷積層D-FPN 網(wǎng)絡獲取疑似船舶候選區(qū)域圖像,通過多尺度錨點設計以滿足船舶目標檢測時的尺寸要求,將疑似船舶候選區(qū)域提取結果作為D-FCN 網(wǎng)絡的輸入,實現(xiàn)船舶目標的精準檢測。
1.2.1 可變形卷積層D-FPN 網(wǎng)絡
常規(guī)卷積方式以不變位置實現(xiàn)船舶遙感圖像輸入信息的采樣處理,在船舶目標外形以及尺寸存在差異時,難以依據(jù)其完成采樣位置的修正,這使得船舶目標檢測模型的特征刻畫能力大幅降低。可變形卷積方式利用采樣位置的偏移量使D-FPN 網(wǎng)絡具有突出的特征表達能力,可變形卷積計算公式描述為:
式中:S為采樣位置,p0為中心點;pi為任意一點采樣點,i=1,2,..,N,用于描述采樣位置編號;?p為采樣點的偏移量; ω為卷積核權重。
D-FPN 是以ResNet50 為基礎并引入3 個可變形卷積層的網(wǎng)絡,其基本結構如圖1 所示。為了充分捕捉船舶遙感圖像信息,提高船舶目標檢測效果,本文設計一個可涵蓋多尺度信息的特征金字塔,按照從上至下路徑以及水平連接形式實現(xiàn)各層特征的融合,其結構如圖2 所示。{C3、C4、C5}為輸入至RestNet50 的特征圖,C5 特征圖經(jīng)過兩次3×3 卷積處理后,可生成具有深層特征的步長為64 的P6 特征圖以及步長為126 的P7 特征圖,再對C5 做一次1×1 卷積并上采樣,可實現(xiàn)特征圖P5 與C4 分辨率的統(tǒng)一,將P5 與C4 作合并處理后,可確定新的特征圖P4,其步長為16,再次執(zhí)行上采樣與合并操作,即可完成P3 特征圖的確定。

圖1 D-FPN 網(wǎng)絡基本結構Fig.1 Basic structure of D-FPN network
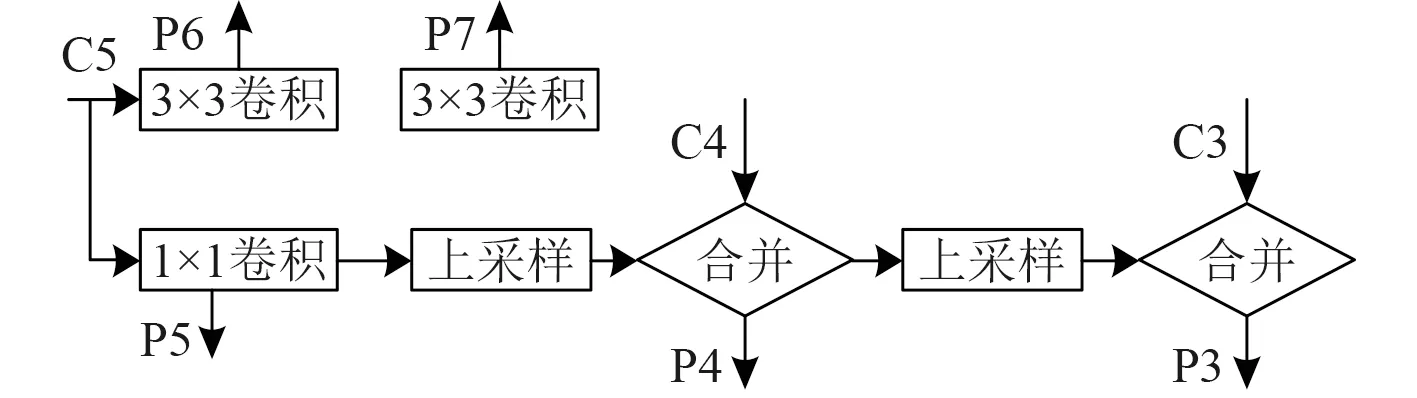
圖2 多尺度特征金字塔結構Fig.2 Multi scale feature pyramid structure
1.2.2 D-FCN 網(wǎng)絡設計
D-FCN 網(wǎng)絡結構如圖3 所示。該網(wǎng)絡由3 部分構成:1)特征提取階段參考ResNet50 網(wǎng)絡設計,目的是防止網(wǎng)絡訓練時梯度爆炸等現(xiàn)象的產生;2)特征融合階段是基于U-Net 網(wǎng)絡思想進行設計,以FCN 為前提,通過高低維特征的深層次融合,使船舶目標檢測效果獲得大幅提升;3)在船舶檢測結果輸出階段,采用3 個相同尺度卷積層對特征融合結果進行處理,獲取1 通道置信分數(shù)計算結果、船舶旋轉角度結果、4 通道矩形框邊界信息結果。

圖3 D-FCN 網(wǎng)絡結構Fig.3 D-FCN network junction
為實現(xiàn)船舶旋轉矩形框位置的確定,除了獲取船舶朝向角度參數(shù)之外,還要確定矩形框邊界信息。利用D-FCN 網(wǎng)絡對船舶目標進行檢測時,需采用旋轉矩形框以順時針方向對疑似船舶候選區(qū)域圖像中的船舶目標頂點位置作標記處理,確定船舶目標真實掩膜與預測值。對于目標掩膜,其內各像素點描述為:
式中:di為船舶像素點與旋轉矩形框各邊之間的距離,θ為矩形框旋轉角度,也稱為船舶朝向角度,是船頭、船尾所在直線與圖像所在橫軸所成角度。
U-Net 網(wǎng)絡訓練的損失函數(shù)通過比較原始輸入與底層特征差異進行設計,采用反向傳播算法實現(xiàn)網(wǎng)絡參數(shù)的不斷調整。在誤差反向傳播過程,只有與損失約束更貼近的參數(shù)才具有優(yōu)先調整權,而其余參數(shù)的調整幅度呈現(xiàn)不斷減小趨勢,對網(wǎng)絡頂層參數(shù)更新起到抑制作用。為提高船舶遙感圖像檢測精度,設計新的損失函數(shù)實現(xiàn)網(wǎng)絡頂層參數(shù)的優(yōu)化處理。D-FCN 網(wǎng)絡損失函數(shù)為:
式中:Lbottom為底層原始輸入與輸出之間的損失,Ltop為頂層原始輸入與輸出之間的損失。Lbottom的計算公式為:
式中:Lcls為船舶目標分類損失值,Lgeo為幾何損失值。計算公式分別為:
式中:Ycls實際掩膜; 為其估計值;Lbbax為矩形框定位產生的損失值;Lθ為由船舶旋轉角度造成的損失。
2 實驗結果與分析
以船舶遙感圖像為研究對象,構建包含4 000 張不同類型船舶的遙感圖像數(shù)據(jù)集,圖像尺寸為1 024×1 024,貨運船、郵輪、游艇遙感圖像數(shù)量分別為2 400、1 200、400,添加600 張非船舶遙感圖像作為負樣本。按4∶1 比例劃分訓練樣本與測試樣本,采用本文方法對船舶遙感圖像目標進行檢測,分析其檢測性能。
高質量遙感圖像是確保船舶目標檢測效果達到優(yōu)質水平的前提。以圖4 所示船舶遙感圖像為例,采用本文方法對其作圖像增強與去噪處理,處理前后船舶遙感圖像的視覺效果如圖5 所示。可知,原始船舶遙感圖像具有色彩飽和度低、圖像清晰度差的特點,圖像采集環(huán)境等因素對船舶遙感圖像質量影響較大,導致其視覺效果不理想。以原始遙感圖像進行船舶目標檢測,將對檢測結果產生不利影響。對原始遙感圖像作增強處理后,圖像色彩飽和度與對比度等均獲得有效提升,但因圖像中仍然含有大量噪聲,其視覺效果仍未達到要求。去噪后的船舶遙感圖像畫面清晰度高,圖像模糊等問題得以解決,船舶遙感圖像視覺效果獲得顯著提升。實驗結果表明,本文方法具有船舶遙感圖像處理能力,視覺效果突出。

圖4 船舶遙感圖像原圖Fig.4 Original ship remote sensing image
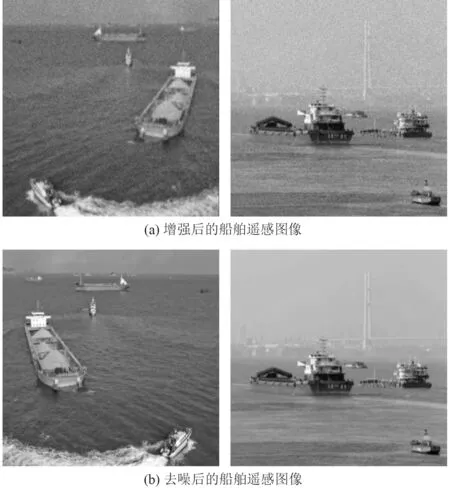
圖5 船舶遙感圖像處理結果Fig.5 Results of ship remote sensing image processing
不同數(shù)量、位置可變形卷積下船舶目標識別精確度(P)、召回度(R)以及F1 分值的差異分析結果如表1所示。分析可知,將相同數(shù)量可變形卷積層放置在基礎網(wǎng)絡ResNet 的Res2(3)、Res3(3)、Res4(3)、Res5(3)不同位置上,其嵌入位置于Res5(3)時的船舶目標識別P、R和F1分數(shù)指標值最高,說明將其放置在ResNet 基礎網(wǎng)絡后端對提升船舶目標檢測精度更有利。當將不同數(shù)量可變形卷積層均放置在相同位置處,當其使用數(shù)量為3 時,船舶目標檢測的P、R、F1分數(shù)指標值最大,說明其用量越高對船舶目標檢測精度的提升越有利。實驗結果表明:將3 個可變形卷積層嵌入到ResNet 基礎網(wǎng)絡后端,可有效提升船舶目標檢測效果。

表1 可變形卷積層數(shù)量與位置對船舶檢測結果影響Tab.1 The Influence of the number and position of deformable convolutional layers on ship detection results
本文方法的檢測損失曲線如圖6 所示。分析可知,船舶目標檢測模型訓練過程中,隨著訓練次數(shù)的不斷增長,模型訓練損失呈現(xiàn)出持續(xù)降低變化規(guī)律。結果表明,船舶遙感圖像訓練損失很小,模型訓練效果突出。

圖6 船舶目標檢測訓練損失曲線分析Fig.6 Analysis of ship target detection training loss curve
應用本文方法對測試樣本中的不同類型船舶目標進行檢測,通過對檢測結果進行分析,驗證本文方法的優(yōu)越性,實驗結果如圖7 所示。圖中矩形框對檢測到的船舶進行標記。結果表明,本文方法具有船舶遙感圖像目標檢測性能,檢測效果突出。

圖7 船舶目標檢測結果Fig.7 Ship target detection results
3 結 語
本文研究利用深度卷積神經(jīng)網(wǎng)絡對船舶遙感圖像目標檢測方法,通過對處理后的船舶遙感圖像視覺效果、可變形卷積在船舶檢測中的作用以及船舶目標檢測結果等進行分析,驗證本文方法的船舶檢測性能。實驗結果表明:處理后的船舶遙感圖像畫面清晰、色彩飽和度好;引入可變形卷積有利于提高船舶目標檢測效果。本文方法可實現(xiàn)不同類型船舶檢測,檢測效果突出。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36