一種家用助餐服務(wù)機(jī)器人結(jié)構(gòu)設(shè)計(jì)與有限元分析
2023-11-24 06:19:24張曉瑩李俊穎
裝備制造技術(shù) 2023年9期
關(guān)鍵詞:機(jī)械設(shè)計(jì)
張曉瑩,李俊穎
(1.鄭州科技學(xué)院機(jī)械工程學(xué)院,河南 鄭州 450064;2 河南水利與環(huán)境職業(yè)學(xué)院,河南 鄭州 450008)
0 引言
在科技快速進(jìn)步與創(chuàng)新的21 世紀(jì),越來越多的工業(yè)制造設(shè)備走向智能化、人性化、便捷化。在這個(gè)背景下,有諸多如:智能代步椅、殘疾人升降機(jī)、殘疾人洗漱設(shè)備等生活輔助設(shè)備被發(fā)明與設(shè)計(jì)出來,在衣食住行上給他們的生活創(chuàng)造了生活便捷條件。為幫助殘障人士和老年人解決用餐困難的問題,設(shè)計(jì)一種家用助餐服務(wù)機(jī)器人。
1 國內(nèi)外發(fā)展現(xiàn)狀
英國人Mike Topping 研制的Handyl 機(jī)器人,最主要的功能是為使用者喂食,采用5 自由度的機(jī)械臂和3 種可拆卸的托盤來滿足不同的使用需求。它是目前世界上最成功的一種低價(jià)的康復(fù)機(jī)器人,使一個(gè)11 歲患有腦癱的男孩能夠獨(dú)立就餐[1]。在東京舉行的第28 屆國際福利設(shè)備展H.C.R2001 上,日本SECOM公司展示了幫助手腳不方便者就餐的6 軸機(jī)器人“MY SPOON”。該機(jī)器人具備夾住飯菜并且送到殘障人士嘴邊的功能[2]。澳大利亞推出了一款喂飯服務(wù)機(jī)器人,人們將它系在腰上,機(jī)械手可以上下移動,用餐時(shí)人們稍微挪動頭部實(shí)現(xiàn)進(jìn)食[3]。
海軍工程大學(xué)研發(fā)的服務(wù)老年機(jī)器人,它的外觀比較小巧美觀,沒有大的的突起;采用一個(gè)驅(qū)動電機(jī),通過連桿機(jī)構(gòu)來驅(qū)動整個(gè)機(jī)械臂,結(jié)構(gòu)簡單、輕便。餐桌設(shè)計(jì)比較有新意,餐盤和圓桌可以同時(shí)旋轉(zhuǎn),從而彌補(bǔ)手臂結(jié)構(gòu)設(shè)計(jì)的缺陷。但是機(jī)械手的自由度不足,不能算作一個(gè)多關(guān)節(jié)的機(jī)械臂,活動空間受限[4]。哈爾濱工程大學(xué)研發(fā)的MY TABLE 系列助餐機(jī)器人通過腳踏實(shí)現(xiàn)對餐盤中的食物進(jìn)行選餐和進(jìn)食。
2 機(jī)器人總體方案設(shè)計(jì)
2.1 助餐機(jī)器人設(shè)計(jì)要求
助餐服務(wù)機(jī)器人設(shè)計(jì)的目的就是幫助殘障人士和老年人解決日常吃飯不便的困難。通過機(jī)械臂來部分完成或者全部的實(shí)現(xiàn)吃飯吃菜的動作功能。這種機(jī)器人需要輕便、可移動、體積小,并且由于與人類直接親密接觸,故需要安全性與控制性極高。
機(jī)械臂放在餐桌上,飯和菜以及湯盛在機(jī)械臂的底座儲物盤上,這個(gè)儲物盤可以進(jìn)行簡單移動,方便更快進(jìn)行喂飯。機(jī)械臂擁有足夠的自由度以及合適的臂長,能將飯盤上的物品盛起,并且順利將食物放置適當(dāng)?shù)奈恢茫却环?wù)人員食取。要求機(jī)械臂重量輕,體積小,安全性好,具備穩(wěn)定記憶功能,對機(jī)械臂提出如下機(jī)械設(shè)計(jì):
(1)作業(yè)臂最大重量不超過5 kg;
(2)能夠取食最大負(fù)載為600 g;
(3)臂長最大伸長45 cm。
2.2 自由度分配和結(jié)構(gòu)構(gòu)型
助餐機(jī)器人完成喂飯的動作,需要到達(dá)有效工作空間,這個(gè)范圍可以通過具有三個(gè)自由度的臂身來實(shí)現(xiàn),確定末端執(zhí)行器勺子在空間中所處的位置,實(shí)現(xiàn)水平、上下移動的要求。另外,通過三個(gè)自由度的腕部結(jié)構(gòu)來確定勺子在空間的姿態(tài),實(shí)現(xiàn)的姿態(tài)為水平還是豎直或傾斜具體角度。
總體機(jī)械傳動方式確定下來后,對機(jī)械臂的具體結(jié)構(gòu)進(jìn)行設(shè)計(jì),需要根據(jù)實(shí)際的機(jī)械臂應(yīng)用場合分析其基本的功率、受力、扭矩等性質(zhì),從而確定下來具體的機(jī)械結(jié)構(gòu)尺寸與材料選型以及最終的機(jī)械運(yùn)動及其控制方向,最終得出了如下的設(shè)計(jì)方案,如圖1 所示。
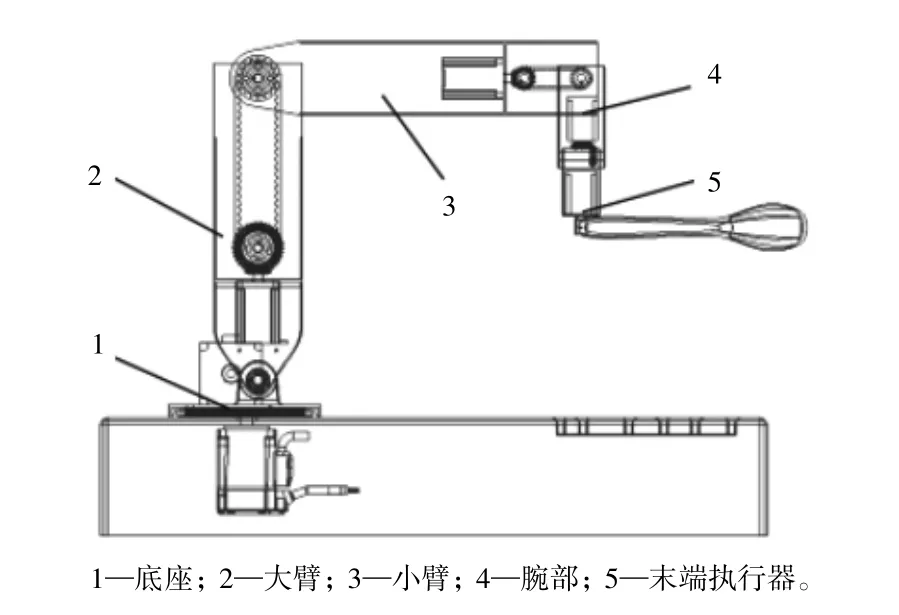
圖1 機(jī)器人總體方案
助餐機(jī)器人由底座、大臂、小臂、腕部、末端執(zhí)行器組成,通過底座回轉(zhuǎn)、大臂俯仰、小臂俯仰、小臂回轉(zhuǎn)、腕部俯仰及腕部回轉(zhuǎn)實(shí)現(xiàn)喂餐動作,共有6 個(gè)自由度,工作空間比較大。
3 機(jī)器人機(jī)械結(jié)構(gòu)設(shè)計(jì)
3.1 機(jī)械臂及底座結(jié)構(gòu)
3.1.1 餐盤底座設(shè)計(jì)
餐盤的尺寸為254 mm × 454 mm × 80 mm,采用內(nèi)部掏空的設(shè)計(jì),減輕重量。較大的面積可以很好的支撐上部的機(jī)械臂,承受機(jī)械臂旋轉(zhuǎn)帶來的扭矩,保證機(jī)械裝置的穩(wěn)定性;同時(shí)面積較大,可以裝下足夠的飯與菜。餐盤棱角采用圓角設(shè)計(jì),可以增加美感與觸感,不會割手。整個(gè)餐盤底座為不銹鋼材質(zhì),采用沖壓的工藝制作而成。整個(gè)沖壓的工藝為:設(shè)計(jì)樣式圖紙-不銹鋼下料-拋光-清洗-干燥-置于模具上-落模成型-脫包裝-入庫,由于本篇文章側(cè)重于機(jī)械臂結(jié)構(gòu)設(shè)計(jì),故對此處的沖壓工藝不再詳細(xì)分析。
3.1.2 機(jī)械臂旋轉(zhuǎn)底座設(shè)計(jì)——第一軸
機(jī)械臂旋轉(zhuǎn)底座采用的是內(nèi)嚙合直齒輪設(shè)計(jì),由于空間有限,以及機(jī)械大臂的尺寸大的機(jī)構(gòu)特征,為了充分利用空間,故選擇內(nèi)嚙合機(jī)械齒輪結(jié)構(gòu),此類結(jié)構(gòu)傳動穩(wěn)定,精度高,便于動力元件-伺服電機(jī)的控制。具體結(jié)構(gòu)如圖2 所示。
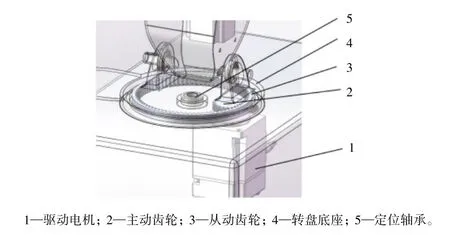
圖2 機(jī)械臂旋轉(zhuǎn)底座傳動設(shè)計(jì)圖
機(jī)械傳動結(jié)構(gòu):驅(qū)動電機(jī)轉(zhuǎn)動一定角度,由主動齒輪與從動齒輪內(nèi)嚙合,從動齒輪為一個(gè)內(nèi)齒圈,其余轉(zhuǎn)盤底座通過螺紋頂絲安裝固定,當(dāng)從動輪被帶動時(shí),轉(zhuǎn)盤底座同樣進(jìn)行轉(zhuǎn)動,進(jìn)而使得整個(gè)機(jī)械臂上部分和末端執(zhí)行部分都進(jìn)行轉(zhuǎn)動,從而可以控制末端執(zhí)行部位的停留位置。
3.1.3 機(jī)械臂大臂關(guān)節(jié)設(shè)計(jì)——第二軸
機(jī)械臂的大臂起到支撐整個(gè)機(jī)械臂的作用,對其臂身的剛度有著較為重要的要求,同時(shí)其關(guān)節(jié)處的受力情況又是整個(gè)機(jī)械臂受力最大處,故在設(shè)計(jì)的時(shí)候,對其參數(shù)性能要求很高。本設(shè)計(jì)方案采用的是利用外嚙合斜齒輪進(jìn)行傳動,具有一定的減速比。具體結(jié)構(gòu)如圖3 所示。
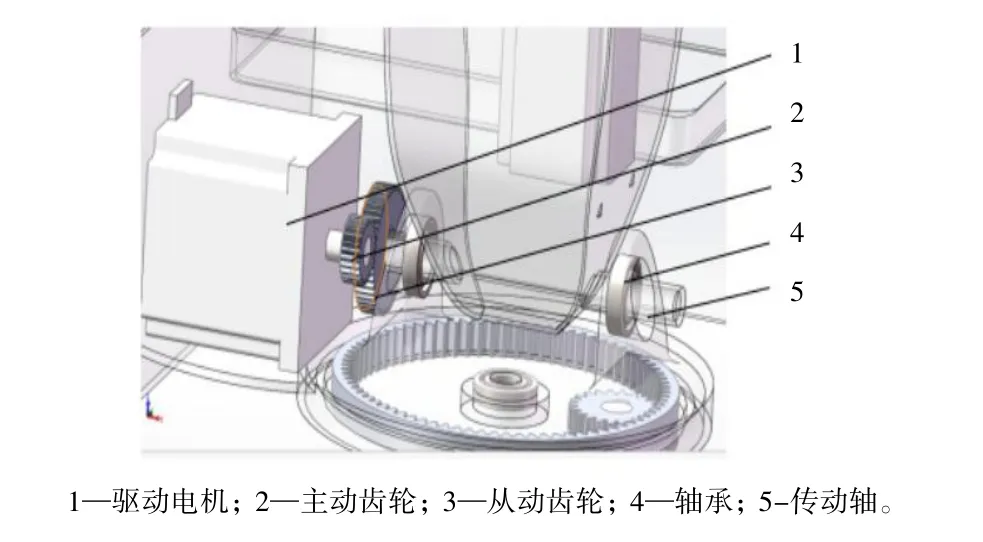
圖3 機(jī)械臂大臂關(guān)節(jié)傳動設(shè)計(jì)圖
3.1.4 機(jī)械臂小關(guān)節(jié)傳動設(shè)計(jì)——第三軸
機(jī)械臂的大臂與小臂的聯(lián)合運(yùn)動,基本上控制了整個(gè)機(jī)械手的工作范圍,由于空間的限制,機(jī)械臂小臂的傳動采用同步帶的控制方式進(jìn)行傳動。由于傳動的動力件電機(jī)軸與被輸出的7 軸在空間上承90°角,故采用錐齒輪進(jìn)行傳動來改變傳動方向,如圖4 所示。
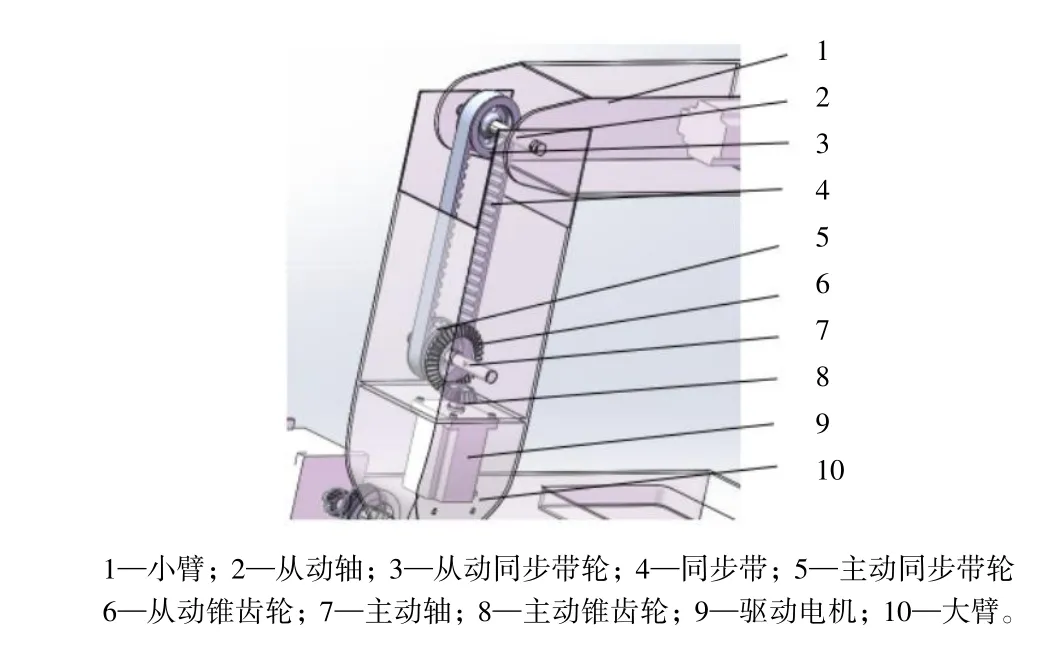
圖4 機(jī)械臂小臂關(guān)節(jié)傳動設(shè)計(jì)圖
3.2 手腕關(guān)節(jié)設(shè)計(jì)
3.2.1 大手腕關(guān)節(jié)設(shè)計(jì)——第四軸
第四軸是對第三軸在豎直方向上的方位補(bǔ)充修正,使其運(yùn)動的結(jié)構(gòu)更加靈活。第四軸與第三軸的結(jié)構(gòu)類似,如圖5 所示。都是先通過錐齒輪傳動,將電機(jī)的傳動方向轉(zhuǎn)成90°的方向,再通過同步帶傳動,使得驅(qū)動電機(jī)可以控制從動軸旋轉(zhuǎn)指定的角度,而從動軸又與手腕機(jī)架成鎖定狀態(tài),意味著手腕機(jī)架旋轉(zhuǎn)的角度跟從動軸的角度一樣,從而達(dá)到控制手腕旋轉(zhuǎn)的目的。

圖5 機(jī)械臂大手腕關(guān)節(jié)傳動設(shè)計(jì)圖
3.2.2 小手腕關(guān)節(jié)設(shè)計(jì)——第五軸
小手腕關(guān)節(jié)傳動主要就是采用錐齒輪進(jìn)行傳動控制,將驅(qū)動電機(jī)軸的方向更改90°,當(dāng)驅(qū)動電機(jī)轉(zhuǎn)動,通過錐齒輪傳動,使得小手腕部分進(jìn)行圍繞旋轉(zhuǎn)軸旋轉(zhuǎn),產(chǎn)生手腕平面上的轉(zhuǎn)動,調(diào)整位置,當(dāng)對人進(jìn)行喂飯的時(shí)候,可以方便的調(diào)整位置,如圖6 所示。

圖6 機(jī)械臂小手腕關(guān)節(jié)傳動設(shè)計(jì)圖
3.2.3 末端執(zhí)行機(jī)構(gòu)設(shè)計(jì)——第六軸
該軸位于整個(gè)機(jī)械臂的最末端,為最后的執(zhí)行機(jī)構(gòu),負(fù)責(zé)旋轉(zhuǎn)運(yùn)動,對湯勺進(jìn)行旋轉(zhuǎn),完成盛飯盛菜的功用。湯勺由驅(qū)動電機(jī)直接驅(qū)動,對其角度進(jìn)行控制,通過減速電機(jī)的直接驅(qū)動,控制更加便捷,如圖7 所示。
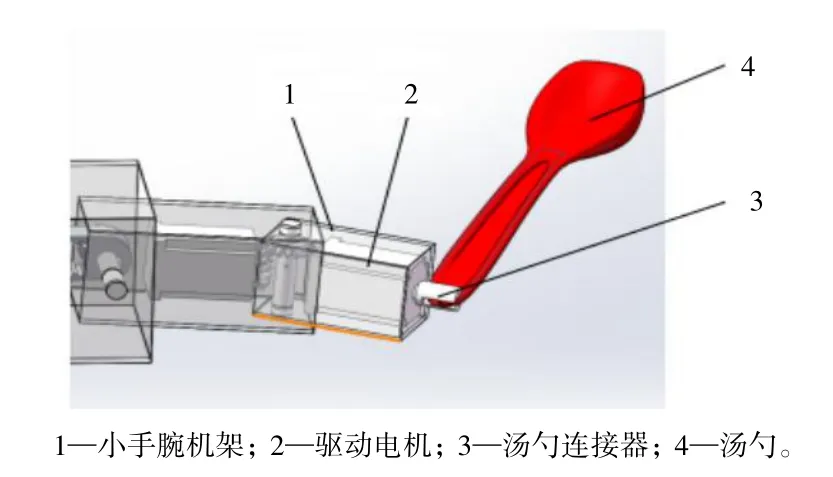
圖7 機(jī)械臂末端執(zhí)行機(jī)構(gòu)傳動設(shè)計(jì)圖
4 大臂關(guān)節(jié)軸的有限元分析
通過有限元對大臂關(guān)節(jié)軸進(jìn)行分析,最小安全系數(shù)分布情況如圖8 所示,最小安全系數(shù)為4.5,大于1.3,設(shè)計(jì)符合要求[5]。
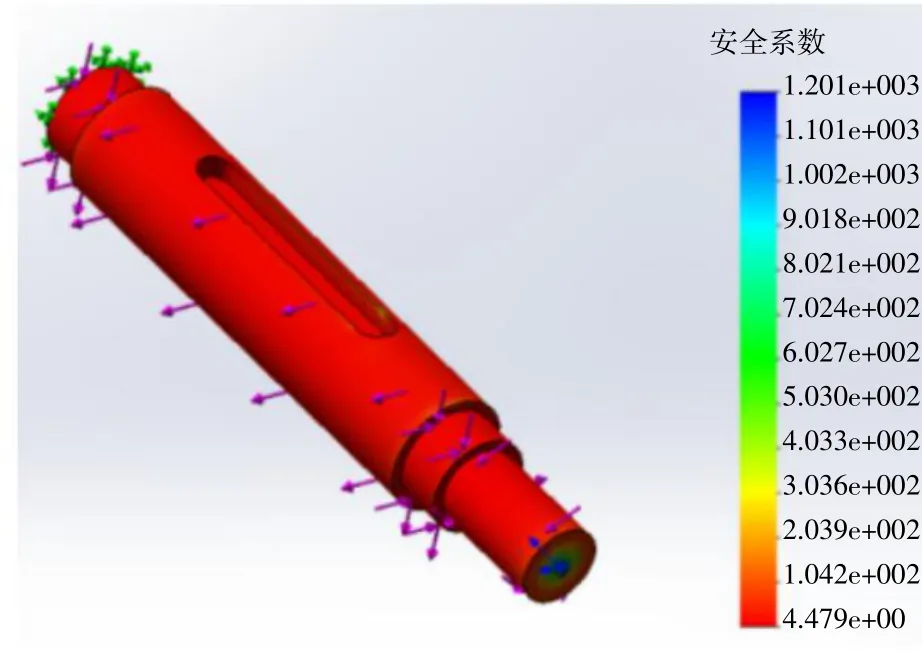
圖8 最小安全系數(shù)分布情況
5 機(jī)器人喂餐功能仿真分析
利用SolidWorks 自帶的插件Motion 進(jìn)行簡單的運(yùn)動學(xué)仿真,完成取餐喂餐的動作,仿真結(jié)果如圖9所示。
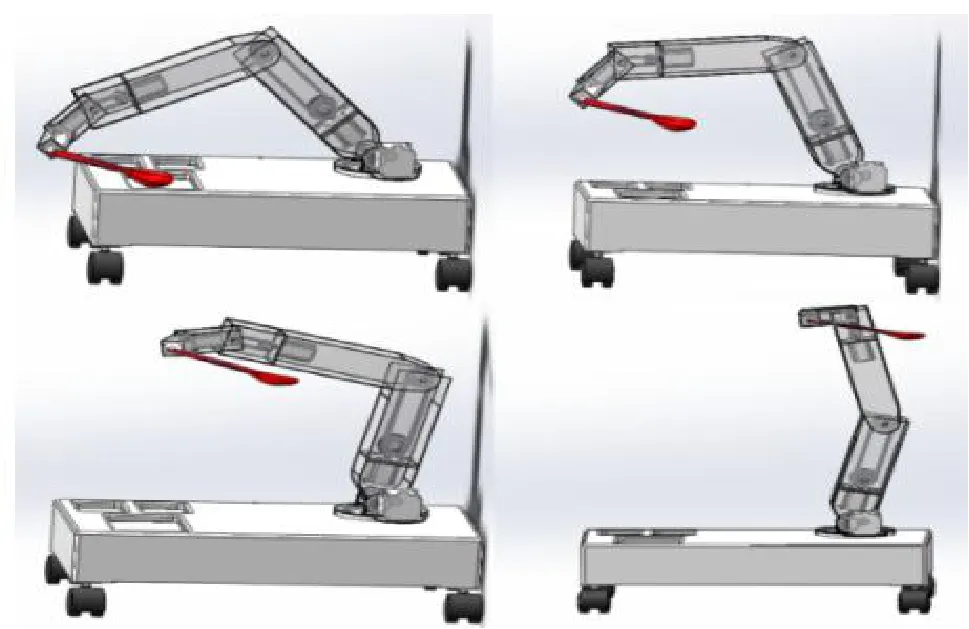
圖9 喂餐功能仿真分析
用于助殘助老的服務(wù)老年機(jī)器人具有質(zhì)量輕,體積小,操作空間大的特點(diǎn)[6],在為人服務(wù)特別是助老助殘方面有良好的應(yīng)用前景,因此該服務(wù)老年助餐機(jī)器人的設(shè)計(jì)具有重要的研究意義和實(shí)際價(jià)值。本文對助餐機(jī)器人進(jìn)行了詳細(xì)的結(jié)構(gòu)設(shè)計(jì),對關(guān)鍵零件進(jìn)行了有限元分析,并進(jìn)行了喂餐功能仿真,設(shè)計(jì)可靠便捷。
猜你喜歡
電腦報(bào)(2020年35期)2020-09-17 13:25:53
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09