諧振式加速度計閉環控制電路非線性振動分析
2023-11-25 13:03:58趙輝
今日自動化 2023年8期
關鍵詞:信號
趙 輝
(中國電子科技集團公司第二十二研究所,河南新鄉 453000)
硅微諧振式加速度計通過檢測內部諧振器諧振頻率的變化來實現加速度的測量,頻率信號類似于數字化信號,抗干擾能力強,在傳輸過程中能保持高穩定性;另外,硅微諧振式加速度計具有體積小、質量輕、成本低、功耗小、可批量生產等優點,在軍民領域都有廣泛的應用前景[1]。
硅微諧振式加速度計性能主要受到設計方案、加工工藝、加工材料、控制電路等影響。由于諧振頻率較高,諧振器在自激振蕩過程中出現非線性振動,使系統的固有頻率隨著振動幅度而改變,且可能存在多個穩態解,在同一激勵條件下會產生倍頻或者分頻響應[2]。一旦自激回路出現多諧波振蕩,諧振器固有頻率測量精度下降甚至無法正常測量。文章利用鎖相環的窄帶濾波特性,設計了帶有鎖相環的諧振式加速度計自激閉環控制系統,消除非線性振蕩中的高次諧波,恢復出正常的諧振信號,使整個加速度計正常工作。
1 諧振式加速度計諧波抑制原理
1.1 工作原理
諧振式加速度計核心部件是一對雙端固定的諧振梁。當有加速度作用于系統時,質量塊將慣性力施加于兩個對稱的諧振梁,其中一個諧振梁受到軸向拉力,固有頻率增大;同時,另外一個諧振梁受到軸向壓力,固有頻率減小[3]。這樣兩個諧振梁構成差分結構,通過外圍電路檢測兩者固有頻率變化差,就可以計算出被測加速度值。諧振器通過自激閉環控制電路,工作于諧振狀態,方便信號提取檢測。
1.2 諧振器非線性動力學方程
諧振器的等效數學模型可以視為二階彈簧——阻尼系統[4],二階系統模型為:
式中,x為諧振梁相對位移,ξ為系統的阻尼比,w0為諧振器的固有頻率,F為外加驅動信號,m為諧振器質量。
根據式(2),當驅動信號頻率w等于諧振器固有頻率w0時,振動位移幅度最大,并且振動位移和驅動信號之間存在90°相位差。其中,A代表驅動信號的振幅大小,x(t)代表諧振梁相對位移-時間函數,φ為驅動信號相位。
諧振器的非線性振動模型為:
式中,δ為三次方非線性系數。
式中,B1、B2是常數,其值完全由系統參數決定。
可見,由于非線性誤差的存在,一旦自激振蕩系統中出現3次諧波,系統將發生亞諧波共振,回路信號混有諧波分量后導致測量精度降低。
1.3 諧振式加速度計閉環控制電路
諧振式加速度計自激閉環控制電路主要有接口電路、幅度控制電路、相位控制電路構成。接口電路利用C/V 轉換電路將梳齒的電容變化轉化為電壓,然后對已轉化為電壓的差動電容信號進一步放大。相位控制電路利用90°移相電路控制環路的整體相移。移相后的信號分為兩路:一路進行整流積分來控制驅動信號幅度;另一路經過鎖相環來跟蹤諧振器的諧振頻率。最后將兩路分開控制的信號通過乘法器相乘,再經過耦合電路形成諧振器所需要的驅動信號反饋到諧振器。在閉環回路中加入了鎖相環,濾除系統中產生的諧波干擾信號,能夠鎖定跟蹤加速度計的諧振頻率。
2 鎖相環濾除諧波原理
鎖相環是一種頻率控制電路,能夠使輸出信號頻率鎖定在輸入信號頻率上,具有窄帶濾波的特性,并且控制輸入、輸出信號的相位差恒定。如圖1所示,鑒相器、低通濾波器、壓控振蕩器共同構成鎖相環系統。

圖1 鎖相環原理
式(6)施加到壓控振蕩器上,控制壓控振蕩器輸出信號的頻率為:
式中,wr為壓控振蕩器在輸入電壓為0時輸出信號的頻率,即中心頻率;k0為壓控振蕩器增益,實際上為壓控振蕩器的靈敏度。
可見,壓控振蕩器的輸出信號頻率完全由輸入電壓控制。由式(6)可見,只要輸出信號的頻率和輸入信號基波頻率不相同,即壓控振蕩器的控制電壓就會一直波動,鎖相環會不斷的調整其輸出頻率向輸入信號頻率靠近,直至兩者相同,控制電壓穩定下來,控制鎖相環輸出信號的頻率和輸入信號頻率相同。
3 仿真與實驗
3.1 Matlab仿真分析
建立諧振式加速度計自激振蕩回路的Simulink仿真模型如圖2所示。其中,諧振器的模型根據式(3)建立,Gain1和Gain2分別是表示C/V 轉換、儀表放大增益。力矩器反映了梳齒靜電驅動物理模型,將驅動電壓轉化為靜電力,Gain 代表力矩器增益。Gain3是對調制信號的匹配增益,Gain4是閉環回路的補償增益。幅度控制環節首先利用絕對值運算對輸入信號進行全波整流,然后經過低通濾波器提取出信號的幅度信息,最后利用PI 控制器實現幅度自動增益控制。利用精密移相器(phase change)產生90°移相使整個回路滿足自激振蕩的相位條件。將一個頻率為固有頻率2倍頻的正弦信號調制到閉環驅動回路中,用來模擬非線性系統高頻激勵信號,其含有系統固有頻率的3倍頻信號,符合激勵條件。
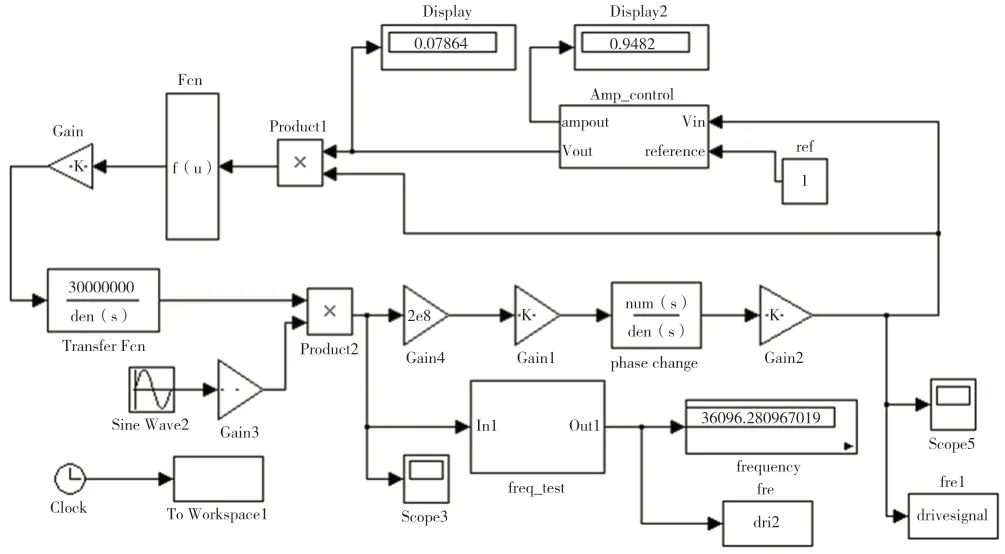
圖2 非線性自激振蕩仿真
仿真結果如圖3所示。由圖可見,驅動信號為3次諧波與基波疊加的信號,驅動頻率不斷跳躍不穩定,無法準確測出,加速度計無法工作,并且自激振蕩回路本身無法消除高次諧波。

圖3 自激閉環非線性振蕩仿真結果
自激閉環電路無法消除諧波共振現象,為了避免這種不利影響,在電路中加入鎖相環,利用其窄帶濾波特性將高次諧波濾除,恢復正常的諧振信號。建立非線性振蕩鎖相環閉環控制仿真原理圖,如圖4所示。由于鎖相環自身具有90°移相功能,故鎖相環仿真回路中沒有移相器。鎖相環控制仿真結果如圖5所示。調制信號經過鎖相環濾波之后變成正常的驅動信號,驅動頻率快速趨于穩定,不會反復跳動,頻率測量結果顯示驅動信號的諧振頻率能夠正常測量出來。

圖4 鎖相環控制非線性系統仿真

圖5 鎖相環回路非線性振蕩仿真結果
3.2 實驗
文章設計了帶有鎖相環的諧振式加速度計自激閉環控制電路,并進行了實測。利用模擬示波器對電路板上的關鍵信號進行提取,對采集到的鎖相環前后的驅動信號進行對比。通過對比可以看出,含有諧波分量的檢測信號經過鎖相環之后,恢復成單一頻率的交流信號,頻率便可以精確測量出來,驗證了仿真結果。
4 結束語
對比加入鎖相環和不加入鎖相環的仿真結果,表明利用鎖相環能夠解決諧振式加速度計閉環控制回路中非線性振蕩現象,濾除驅動信號中的高次諧波,使加速度計正常工作。通過對實際電路調試過程中采集到的波形進行分析,驗證了理論仿真結果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
